TUGAS AKHIR
ANALISIS PERHITUNGAN PANAS MOTOR DC SHUNT
PADA SAAT START DAN PENGEREMAN
( Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU ) Diajukan untuk memenuhi salah satu persyaratan dalam
menyelesaikan pendidikan sarjana (S-1) pada Departemen Teknik Elektro
O l e h
EKA DIAN ARJUNA GINTING NIM. 050422031
DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
ii
KATA PENGANTAR
Puji dan syukur kepada Tuhan Yang Maha Esa, yang telah memberikan rahmat dan karunianya kepada penulis sehingga dapat menyelesaikan Tugas Akhir ini, yang merupakan persyaratan untuk menyelesaikan studi di Departemen Teknik Elektro Fakultas Teknik USU. Dalam penulisan Tugas Akhir ini, penulis mengambil judul :
” ANALISIS PERHITUNGAN PANAS MOTOR DC SHUNT PADA SAAT START DAN PENGEREMAN”
( Aplikasi pada Laboratorium Konversi Energi Listrik FT-USU ) Penulis menyadari bahwa tulisan ini tidak akan selesai tanpa adanya bantuan dan dukungan dari berbagai pihak.
Pada kesempatan ini saya ingin menyampaikan ucapan terima kasih yang tulus dan sebesar-besarnya kepada:
1. Kedua orang tua penulis Ir.B.Ardian Ginting dan Ibunda Alm.Sri Suci Juniati serta Ibunda Herma Yesti dan tak lupa juga adik – adik penulis yang tidak pernah berhenti memberi dukungan, semangat dan doanya kepada saya dengan segala pengorbanan dan kasih sayang yang tidak ternilai besarnya.
2. Bapak Surya Tarmizi Kasim,M.Si selaku Ketua Departemen Teknik Elektro Fakultas Teknik USU.
4. Bapak Ir. Sumantri Zulkarnaen sebagai Dosen Pembimbing Tugas Akhir penulis yang sangat besar bantuannya bagi penulis dalam menyelesaikan Tugas Akhir ini.
5. Bapak Ir.Panusur SML Tobing, selaku Dosen Wali Penulis yang telah banyak membimbing dan membantu selama masa kuliah sampai penyusunan Tugas Akhir ini.
6. Bapak Ir. Syamsul Amien, M.Si sebagai Kepala Laboratorium Konversi Energi Listrik Fakultas Teknik USU yang telah memberi izin riset di Laboratorium Konversi Energi Listrik.
7. Seluruh mahasiswa Teknik Elektro Ekstension USU.
Penulis menyadari bahwa tulisan ini masih memiliki banyak kekurangan, oleh karena itu saran dan kritik sangat diperlukan dalam mengembangkan isi dari Tugas Akhir ini.
Semoga Tugas Akhir ini dapat bermanfaat bagi penulis pribadi dan juga semua pihak yang membutuhkan.
Medan, April 2011 Penulis
iii
ABSTRAK
Motor adalah mesin yang mengubah energi listrik menjadi energi mekanis. Pada motor arus searah energi listrik arus searah diubah menjadi energi mekanis. Dalam dunia industri, motor arus searah banyak digunakan sebagai penggerak pompa air, blower, hoist pada crane.
DAFTAR ISI
KATA PENGANTAR………i
ABSTRAK……….iii
DAFTAR ISI………..………iv
DAFTAR TABEL………...…viii
DAFTAR GAMBAR………...ix
BAB I PENDAHULUAN I.1 Latar Belakang……….…..…1
I.2 Tujuan Penulisan………...…1
I.3 Batasan Masalah………2
I.4 Metode Penulisan………...3
I.5 Sistematika penulisan………3
BAB II MOTOR ARUS SEARAH II.1 Umum...5
II.2 Konstruksi Motor Arus Searah...5
II.3 Prinsip kerja Motor Arus Searah...7
II.4 Reaksi Jangkar...9
II.5 Jenis-jenis Motor Arus Searah...11
II.5.1 Motor Arus Searah Penguatan Bebas...12
II.5.2 Motor Arus Searah Penguatan Sendiri...13
II.5.2.1 Motor Arus Searah Penguatan Seri...13
II.5.2.2 Motor Arus Searah Penguatan Shunt...14
II.6 Torsi dari Motor DC...15
v
II.6.2 Torsi jangkar dari Motor DC...16
II.6.3 Torsi Poros dari Motor DC...18
II.7 Pengaturan Kecepatan Pada Motor Arus Searah ...18
II.8 Karakteristik Motor Arus Searah Penguatan Shunt...20
II.8.1 Karakteristik Putaran – Arus Jangkar ( n/ Ia ) ...21
II.8.2 Karakteristik Torsi – Arus Jangkar ( T/ Ia ) ...23
II.8.3 Karakteristik Torsi – Putaran ( T/n ) ...23
BAB III PERHITUNGAN PANAS MOTOR DC SHUNT PADA SAAT START DAN PENGEREMAN III.1 Metode Retardasi Dalam Menentukan Momen Inersia Motor DC...25
III.1.1 Prinsip Dasar...25
III.1.2 Metode Pengukuran Momen Inersia Pada Jangkar...26
III.2 Rugi – Rugi Motor Arus Searah...28
III.2.1 Umum...28
III.2.2 Jenis Rugi – Rugi Di Dalam Motor Arus Searah...29
III.2.2.1 Rugi-Rugi Tembaga (Copper losses) ...29
III.2.2.2 Rugi-Rugi Inti (core or iron losses) ...29
III.2.2.3 Rugi-Rugi Mekanis (mechanical losses) ...32
III.2.2.4 Rugi – rugi sikat (brush losses) ...32
III.2.2.5 Rugi-Rugi Beban Stray (stray load load losses) ...33
III.2.3 Penentuan Rugi-Rugi Di Dalam Motor Arus Searah...34
III.2.3.1 Umum...34
III.2.3.2 Penentuan Rugi-Rugi Konstan Motor Arus Searah...35
III.3 Metode Perhitungan Panas Motor DC Shunt Pada Saat start...37
III.3.1 Prinsip Dasar...37
III.3.2 Hubungan Energi (W) Selama Start...38
III.4 Metode Perhitungan Panas Motor DC Shunt Pada Saat Pengereman.40 III.4.1 Prinsip Dasar...40
III.4.2 Hubungan Energi (W) Selama pengereman...42
BAB IV ANALISIS PERHITUNGAN PANAS MOTOR DC SHUNT PADA SAAT START DAN PENGEREMAN IV.1 Pengujian Motor DC Shunt dengan Metode Retardasi dan Pengukuran Tahanan Belitan Motor...44
IV.1.1 Umum...44
IV.1.2 Spesifikasi Motor...44
IV.1.3 Peralatan pengujian...44
IV.1.4 Prosedur Percobaan...45
IV.1.4.1 Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi. ...46
IV.1.4.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi. ...47
IV.1.4.3 Uji Retardasi dengan Rotor Sendiri Eksitasi Penuh...48
IV.1.4.4 Uji Retardasi dengan Roda Pejal Eksitasi Penuh...49
IV.1.4.5 Pengukuran Tahanan Jangkar Motor...49
IV.1.4.6 Pengukuran Tahanan Medan Shunt Motor...50
IV.1.5 Data Hasil Pengujian...50
IV.1.6 Analisa Data Pengujian...52
IV.1.6.1 Perhitungan Momen Inersia Motor DC Shunt... 52
vii IV.2 Analisis Perhitungan Panas Motor DC Shunt pada saat Start dan
Pengereman...54
IV.2.1 Umum...54
IV.2.2 Spesifikasi Motor DC Shunt...55
IV.2.3 Peralatan Percobaan...56
IV.2.4 Rangkaian Percobaan...57
IV.2.5 Prosedur Percobaan...57
IV.2.6 Analisa Data Percobaan...59
IV.2.6.1 Perhitungan Panas Motor DC Shunt pada saat Start ...59
IV.2.6.2 Perhitungan Panas Pada Motor DC Shunt pada saat Pengereman...61
BAB V KESIMPULAN DAN SARAN...63
V.1 Kesimpulan...63
DAFTAR TABEL
Tabel 4.1 Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi...50
Tabel 4.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi...51
Tabel 4.3 Uji Retardasi dengan Rotor sendiri Eksitasi penuh...51
Tabel 4.4 Uji Retardasi dengan Roda Pejal Eksitasi penuh...51
Tabel 4.5 Pengukuran Tahanan Jangkar Motor...52
i
DAFTAR GAMBAR
Gambar 2.1 Konstruksi motor arus searah bagian stator...5
Gambar 2.2 Konstruksi motor arus searah bagian rotor...6
Gambar 2.3 Prinsip kerja motor arus searah...7
Gambar 2.4 Fluksi yang dihasilkan oleh kumparan medan...9
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan jangkar...10
Gambar 2.6 Hasil kombinasi antara fluksi medan dan fluksi jangkar...11
Gambar 2.7 Rangkaian ekivalen motor arus searah penguatan bebas...12
Gambar 2.8 Rangkaian ekivalen motor arus searah penguatan seri...13
Gambar 2.9 Rangkaian ekivalen motor arus searah penguatan shunt...14
Gambar 2.10 Suatu pulley yang berputar karena mengalami suatu gaya...15
Gambar 2.11 Karakteristik Putaran – Arus Jangkar Pada Motor DC Shunt...22
Gambar 2.12 Karakteristik Torsi – Arus Jangkar Pada Motor DC Shunt...23
Gambar 2.13 Karakteristik Torsi – Putaran Pada Motor DC Shunt...24
Gambar 3.1 Diagram Aliran Daya pada Motor Arus Searah...,...28
Gambar 3.2 Perputaran jangkar di dalam motor dua kutub...30
Gambar 3.3 (a) Arus pusar di dalam inti jangkar yang padat (b) Arus pusar di dalam inti jangkar yang dilaminasi...31
Gambar 3.4 Rangkaian Percobaan Pembebanan Elektris Dalam Pengujian Retardasi...36
Gambar 3.5 Start Motor Arus Searah penguatan Shunt secara langsung...38
Gambar 3.6 Rangkaian Pengereman Dinamik...40
Gambar 4.1 Roda Pejal...45
Gambar 4.2 Rangkaian Kontrol...46
Gambar 4.3 Rangkaian percobaan uji retardasi dengan rotor sendiri tanpa eksitasi...46
Gambar 4.4 Rangkaian percobaan uji retardasi dengan roda pejal tanpa eksitasi...47
eksitasi penuh...49
Gambar 4.7 Rangkaian percobaan pengukuran tahanan jangkar...49
Gambar 4.8 Rangkaian percobaan pengukuran tahanan medan shunt...50
Gambar 4.9 Stopwatch...56
iii
ABSTRAK
Motor adalah mesin yang mengubah energi listrik menjadi energi mekanis. Pada motor arus searah energi listrik arus searah diubah menjadi energi mekanis. Dalam dunia industri, motor arus searah banyak digunakan sebagai penggerak pompa air, blower, hoist pada crane.
BAB I
PENDAHULUAN
I.1 Latar Belakang
Pemanasan pada motor dipengaruhi kondisi beban dan kelas dari kerja, momen inertia dari beban dan kondisi sekeliling. Seperti kita ketahui panas dari sebuah mesin adalah fungsi dari rugi – rugi yang digambarkan sebagai panas.
Pada saat motor DC menerima daya masukan berupa energi listrik dan menghasilkan daya keluaran berupa energi mekanis, tidak seluruh daya masukan ke motor diubah menjadi daya keluaran yang berguna, selalu ada energi yang hilang selama proses pengkonversian energi tersebut. Energi yang hilang tersebut ada yang dikonversikan menjadi panas dan ada yang diserap oleh mesin untuk mengatasi gesekan karena adanya bagian yang berputar di dalam mesin. Rugi-rugi daya dalam bentuk panas ini jika nilainya terlalu besar akan dapat menyebabkan kenaikan temperatur motor yang dapat merusak isolasi dan mempercepat berkurangnya umur ekonomis motor sehingga membatasi daya keluaran motor
I.2 Tujuan Penulisan
Adapun tujuan utama penulisan Tugas Akhir ini adalah :
1. Untuk mengetahui dan mempelajari secara nyata pengaturan motor DC penguatan shunt
iv 1. 3 Batasan Masalah
Untuk mendapatkan hasil pembahasan yang maksimal, maka penulis perlu membatasi masalah yang akan dibahas. Adapun batasan masalah dalam Tugas Akhir ini adalah :
1. Tidak membahas pendinginan pada Motor DC Shunt
2. Tidak melibatkan pengaruh kenaikan suhu dalam perhitungan panas pada Motor DC shunt pada keadaan start dan pengereman
3. Perhitungan panas pada Motor DC Shunt dilakukan dengan pembebanan listrik.
4. Pengatur tegangan yang digunakan dalam percobaan adalah pengatur tegangan bolak – balik (PTAC) yang akan disearahkan dengan dioda 3 phasa gelombang penuh sehingga menjadi tegangan DC sesuai yang dibutuhkan Motor DC Shunt.
5. Tidak menghitung panas pada kedaan steady state.
I.4 Metode Penulisan
Karena Tugas Akhir ini merupakan suatu studi aplikasi, maka penulis mencari dan mengumpulkan bahan-bahan dan data-data yang diperlukan melalui :
1. Studi literature : mengambil bahan dari buku-buku referensi, jurnal dan sebagainya.
3. Studi bimbingan : diskusi, berupa tanya jawab dengan dosen pembimbing yang telah ditunjuk oleh pihak Departemen Teknik Elektro USU mengenai masalah-masalah yang timbul selama penulisan Tugas Akhir berlangsung.
I.5 Sistematika Penulisan
Tugas Akhir ini disusun berdasarkan sistematika pembahasan sebagai berikut: BAB I : PENDAHULUAN
Bab ini merupakan pendahuluan yang berisikan tentang latar belakang masalah, tujuan penulisan, batasan masalah,metode penulisan dan sistematika penulisan.
BAB II : MOTOR ARUS SEARAH
Bab ini menjelaskan tentang motor arus searah secara umum, konstruksi motor arus searah, prinsip kerja motor arus searah, jenis-jenis motor arus searah, reaksi jangkar pada motor arus searah, torsi pada motor arus searah, pengaturan kecepatan pada motor arus searah, karakteristik pada motor arus searah penguatan shunt
BAB III: PERHITUNGAN PANAS MOTOR DC SHUNT PADA SAAT START DAN PENGEREMAN
Bab ini menjelaskan tentang metode menentukan nilai momen inersia (J) dari motor DC shunt, rugi – rugi pada motor arus searah, metode perhitungan panas motor DC shunt pada saat start dan pengereman.
vi Bab ini menjelaskan pengujian motor DC shunt dengan metode retardasi, menghitung panas motor DC shunt pada saat start dan pengereman.
BAB V : PENUTUP
BAB II
MOTOR ARUS SEARAH
II.1 Umum
Motor arus searah adalah mesin yang mengubah energi listrik arus searah menjadi energi mekanis yang berupa putaran. Berdasarkan fisiknya motor arus searah secara umum terdiri atas bagian yang diam (stator) dan bagian yang berputar (rotor).
Motor arus searah bekerja berdasarkan prinsip interaksi antara dua fluksi magnetik. Dimana kumparan medan akan menghasilkan fluksi magnet yang arahnya dari kutub utara menuju kutub selatan dan kumparan jangkar akan menghasilkan fluksi magnet yang melingkar. Interaksi antara kedua fluksi magnet ini menimbulkan suatu gaya sehingga akan menimbulkan momen puntir atau torsi.
II.2 Konstruksi Motor Arus Searah
Gambar di bawah ini merupakan konstruksi motor arus searah.
Gambar 2.1 Konstruksi motor arus searah bagian stator
viii Keterangan dari gambar tersebut adalah :
1.Rangka atau gandar
Rangka motor arus searah adalah tempat meletakkan sebagian besar komponen mesin dan melindungi bagian mesin..
2. Kutub Medan
Kutub medan terdiri atas inti kutub dan sepatu kutub. Sepatu kutub yang berdekatan dengan celah udara dibuat lebih besar dari badan inti.
3. Sikat
Sikat adalah jembatan bagi aliran arus ke lilitan jangkar. Dimana permukaan sikat ditekan ke permukaan segmen komutator untuk menyalurkan arus listrik.
4. Kumparan Medan
Kumparan medan adalah susunan konduktor yang dibelitkan pada inti kutub. Rangkaian medan yang berfungsi untuk menghasilkan fluksi utama dibentuk dari kumparan pada setiap kutub.
5. Jangkar
Inti jangkar untuk tempat melilitkan kumparan jangkar tempat terbentuknya ggl induksi.
6. Kumparan Jangkar
Kumparan jangkar pada motor arus searah merupakan tempat dibangkitkannya ggl induksi.
Untuk memperoleh tegangan searah diperlukan alat penyearah yang disebut komutator dan sikat.
8. Celah Udara
Celah udara merupakan ruang atau celah antara permukaan jangkar dengan permukaan sepatu kutub yang menyebabkan jangkar tidak bergesekan dengan sepatu kutub.
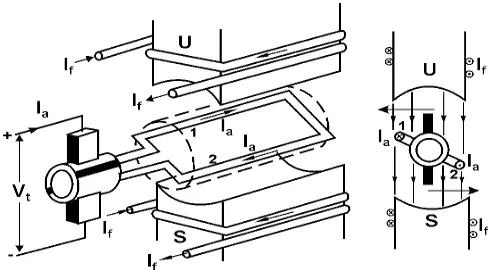
II.3 Prinsip kerja Motor Arus Searah
Prinsip dasar di atas diterapkan pada motor DC. Prinsip kerja sebuah motor arus searah dapat dijelaskan dengan gambar 2.3 berikut:
Gambar 2.3 Prinsip kerja motor arus searah
Berdasarkan gambar di atas kedua kutub stator dibelitkan dengan konduktor- konduktor sehingga membentuk kumparan yang dinamakan kumparan stator atau kumparan medan. Kumparan medan tersebut dihubungkan dengan suatu sumber tegangan, maka pada kumparan medan itu akan mengalir arus medan (If). Kumparan
x sebuah konduktor yang dialiri arus ditempatkan pada sebuah medan magnet maka pada konduktor tersebut akan timbul gaya, maka demikian pula halnya pada kumparan jangkar. Besarnya gaya ini bergantung dari besarnya arus yang mengalir pada kumparan jangkar (I), kerapatan fluksi (B) dari kedua kutub dan panjang konduktor jangkar (l). Semakin besar fluksi yang terimbas pada kumparan jangkar maka arus yang mengalir pada kumparan jangkar juga besar, dengan demikian gaya yang terjadi pada konduktor juga semakin besar.
Jika arus jangkar (I) tegak lurus dengan arah induksi magnetik (B) maka besar gaya yang dihasilkan oleh arus yang mengalir pada konduktor jangkar yang ditempatkan dalam suatu medan magnet adalah :
F = B . I . l Newton………(2.1) Dimana :
I = Arus yang mengalir pada konduktor jangkar (Ampere) B = Kerapatan fluksi (Weber/m2)
l = Panjang konduktor jangkar (m)
Maka, besar gaya keseluruhan yang ditimbulkan oleh jumlah total konduktor jangkar z adalah :
F z.B.I..l Newton ………(2.2)
Gaya yang terjadi pada kumparan jangkar di atas akan menghasilkan torsi yang besarnya adalah :
Ta F.r Newton-meter………(2.3) Maka, Ta z.B.I.l.d/2 Newton- meter…………(2.4)
II.4 Reaksi Jangkar
Reaksi jangkar merupakan pengaruh medan magnet yang disebabkan oleh mengalirnya arus pada jangkar, di mana jangkar tersebut berada di dalam medan magnet. Reaksi jangkar menyebabkan terjadinya 2 hal, yaitu :
1. Demagnetisasi atau penurunan kerapatan fluksi medan utama. 2. Magnetisasi silang.
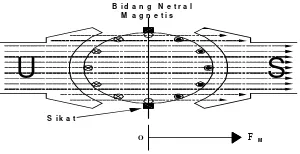
Apabila kumparan medan dialiri oleh arus tetapi kumparan jangkar tidak dialiri oleh arus, maka dengan mengabaikan pengaruh celah udara, jalur fluksi ideal untuk kutub utama dari motor arus searah dua kutub, berasal dari kutub utara menuju kutub selatan seperti pada gambar 2.5 berikut ini [ B.L.Theraja hal 605] :
Gambar 2.4 Fluksi yang dihasilkan oleh kumparan medan Dari gambar 2.4 dapat dijelaskan bahwa :
Fluksi didistribusikan simetris terhadap bidang netral magnetis.
Sikat ditempatkan bertepatan dengan bidang netral magnetis.
Bidang netral magnetis didefinisikan sebagai bidang di dalam motor di mana konduktor bergerak sejajar dengan garis gaya magnet sehingga gaya gerak listrik induksi konduktor pada bidang tersebut adalah nol. Seperti yang terlihat dari gambar 2.4 sikat selalu ditempatkan di sepanjang bidang netral magnetis. Oleh karena itu, bidang netral magnetis juga disebut sebagai sumbu komutasi karena pembalikan arah arus jangkar
U
S
O M
B i d a n g N e t r a l M a g n e t i s
S i k a t
xii berada pada bidang tersebut. Vektor OFM mewakili besar dan arah dari fluksi medan
utama, di mana vektor ini tegak lurus terhadap bidang netral magnetis.
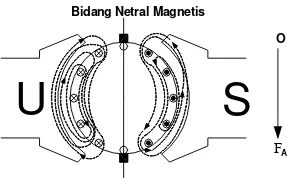
Sewaktu hanya konduktor jangkar saja yang dialiri oleh arus listrik sementara kumparan medan tidak dieksitasi, maka disekeliling konduktor jangkar timbul ggm atau fluksi. Gambaran arah garis gaya magnet ditunjukkan pada gambar 2.5 berikut ini
[ B.L.Theraja hal 606] :
Gambar 2.5 Fluksi yang dihasilkan oleh kumparan jangkar
Penentuan arah dari garis gaya magnet yang diakibatkan oleh arus jangkar ditentukan dengan aturan putaran sekrup (cork-screw rule). Besar dan arah garis gaya magnet tersebut diwakili oleh vektor OFA yang sejajar dengan bidang netral magnetis.
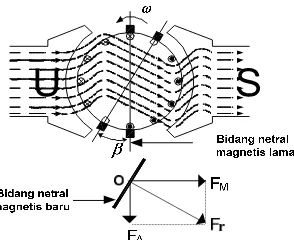
Pada prakteknya, sewaktu mesin beroperasi maka konduktor jangkar dan konduktor medan sama- sama dialiri oleh arus listrik, distribusi fluksi resultan diperoleh dari menggabungkan kedua fluksi tersebut. Oleh karena itu distribusi fluksi medan utama yang melalui jangkar tidak lagi simetris tetapi sudah mengalami pembelokan saat mendekati konduktor yang dialiri arus tersebut. Hal tersebut dikarenakan pengaruh fluksi jangkar yang dapat dilihat dari gambar 2.6 berikut ini [ B.L.Theraja hal 606] :
U
S
Bidang Netral Magnetis
O
Gambar 2.6 Hasil kombinasi antara fluksi medan dan fluksi jangkar
Fluksi yang dihasilkan oleh gaya gerak magnet (ggm) jangkar menentang fluksi medan utama pada setengah bagian dari salah satu kutubnya dan memperkuat fluksi medan utama pada setengah bagian yang lain. Hal ini jelas akan menyebabkan penurunan kerapatan fluksi pada setengah bagian dari salah satu kutubnya dan terjadi kenaikan pada setengah bagian yang lain di kutub yang sama. Efek dari intensitas medan magnet atau lintasan fluksi pada jangkar yang memotong lintasan fluksi medan utama ini disebut sebagai reaksi jangkar magnetisasi-silang (cross-magnetization).
II.5 Jenis-jenis Motor Arus Searah
Jenis-jenis motor arus searah dapat dibedakan berdasarkan jenis penguatannya, yaitu hubungan rangkaian kumparan medan dengan kumparan jangkar. Sehingga motor arus searah dibedakan menjadi :
II.5.1 Motor Arus Searah Penguatan Bebas
xiv +
-Ea
Ra Vf
Vt
Ia I
f
+
-Rf
Gambar 2.7 Rangkaian ekivalen motor arus searah penguatan bebas
Dari rangkaian tersebut berdasarkan hukum Kirchoff tentang tegangan diperoleh persamaan:
Vt = Ea + Ia.Ra + Vsikat ………..(2.5)
Vf = If . Rf ……….……….…..(2.6)
Dimana:
Vt = tegangan terminal jangkar motor arus searah (volt)
Ra = tahanan jangkar (ohm)
If = arus medan penguatan bebas (ampere)
Vf = tegangan terminal medan penguatan bebas (volt)
Rf = tahanan medan penguatan bebas (ohm)
Ea = gaya gerak listrik motor arus searah (volt)
Vsikat = jatuh tegangan pada sikat (volt)
Umumnya jatuh tegangan pada sikat relatif kecil sehingga besarnya dapat diabaikan. Dan untuk rumus selanjutnya Vsikat ini diabaikan.
II.5.2 Motor Arus Searah Penguatan Sendiri
diberikan terhadap motor. Motor arus searah penguatan sendiri terdiri atas Motor arus searah penguatan seri, shunt, kompon panjang, kompon pendek.
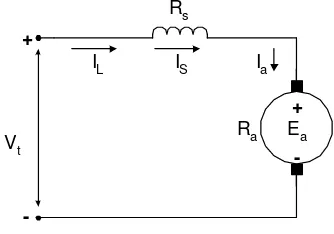
II.5.2.1 Motor Arus Searah Penguatan Seri
Rangkaian ekivalen motor arus searah penguatan seri adalah sebagai berikut:
Rs
Vt
+
-Ea Ra
Ia IL
+
-IS
Gambar 2.8 Rangkaian ekivalen motor arus searah penguatan seri
Pada motor arus searah penguatan seri, kumparan medan dihubungkan secara seri dengan rangkaian jangkar. Oleh sebab itu arus yang mengalir pada kumparan medan seri sama dengan arus yang mengalir pada kumparan jangkar.
Persamaan - persamaan yang berlaku pada motor arus searah penguatan seri adalah: Vt = Ea + Is.Rs + Ia. Ra ………..(2.7)
Karena, IL= Ia = Is
Maka Vt = Ea + Ia (Ra + Rs) ………(2.8)
Dimana :
Is = arus kumparan medan seri (Ampere)
Rs = tahanan medan seri (ohm)
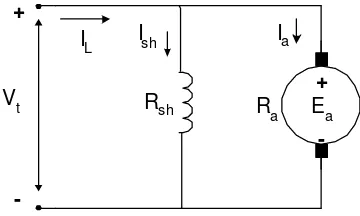
xvi II.5.2.2 Motor Arus Searah Penguatan Shunt
Rangkaian ekivalen motor arus searah penguatan shunt ditunjukkan pada gambar
Gambar 2.9 Rangkaian ekivalen motor arus searah penguatan shunt
Pada motor shunt kumparan jangkar dihubungkan langsung pada terminal sehingga paralel dengan kumparan jangkar.
Persamaan - persamaan yang berlaku pada motor shunt adalah:
Vt = Ea + Ia.Ra ………..……(2.9)
Ish = arus kumparan medan shunt (Ampere)
II.6 Torsi dari Motor DC II.6.1 Prinsip Dasar
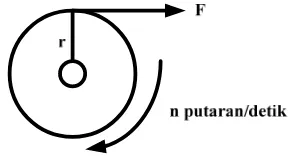
Torsi adalah putaran atau pemuntiran dari suatu gaya terhadap suatu poros. Ini diukur dengan hasil kali gaya itu dengan jari – jari lingkaran dimana gaya tersebut bekerja. Gambar 2.10 menunjukkan suatu pulley dengan jari – jari r bekerja suatu gaya F newton yang menyebabkan benda berputar dengan kecepatan n putaran per detik.
Torsi = F x r Newton – meter (N-m).
Usaha yang dilakukan oleh gaya tersebut pada suatu putaran [ B.L. Theraja hal.666 ] : = gaya x jarak
= F x 2 r Joule ………...…(2.12)
Gambar 2.10 Suatu pulley yang berputar karena mengalami suatu gaya Daya yang dibangkitkan adalah,
= F x 2 r x n Joule/detik
= (F x r) 2 n Joule/detik ……….…(2.13) Jika : 2 n = kecepatan sudut ()dalam rad/detik
F x r = torsi T, maka daya yang dibangkitkan = T x Joule/detik
= T x watt …….…(2.14) II.6.2 Torsi jangkar dari Motor DC
xviii masing – masing konduktor menghasilkan suatu torsi yang cenderung untuk memutar. Jumlah seluruh torsi yang dihasilkan oleh konduktor jangkar dikenal dengan torsi jangkar (Ta). Jika pada suatu motor DC : Torsi yang dihasilkanoleh suatu konduktor = F x r Newton-meter
Torsi jangkar, Ta = Z F r Newton-meter
Ta = Z B i l Newton-meter (2.16)
Sekarang i = Ia/A, B = /a dimana a adalah luas penampang jalur fluks per kutub pada
Karena Z, P dan A nilainya selalu tetap, maka : Ta ~ Ia
Karena itu torsi didalam motor DC berbanding langsung dengan fluks per kutub dan arus jangkar. Untuk motor DC shunt, besarnya fluks relative konstan sehingga :
Ta ~ Ia...…...(2.19)
Ekspresi lainnya untuk menyatakan besarnya torsi jangkar yaitu : Ea =
Dari persamaan (2.18) di atas diperoleh persamaan untuk Ta yaitu [ B.L. Theraja hal 667]
:
Torsi yang dapat dimanfaatkan pada poros motor untuk melakukan usaha yang berguna dikenal dengan torsi poros. Ini dilambangkan dengan Tsh. Torsi total yang
dibangkitkan didalam jangkar motor tidak semuanya dapat digunakan pada poros karena sebagiannya hilang untuk mengatasi rugi – rugi besi dan gesek didalam motor. Dengan demikian, torsi poros Tsh lebih kecil nilainya dibandingkan torsi jangkar Ta. Selisih Ta -
xx
Tsh dapat dihitung dengan cara sebagai berikut [ B.L. Theraja hal 667 ]:
Daya keluaran dalam Watt ( Pout ) = Pin - ∑ rugi - rugi
II.7 Pengaturan Kecepatan Pada Motor Arus Searah
Sebagaimana telah diketahui bahwa di dalam motor DC berlaku persamaan [ V.K dan Rohit Mehta hal 337] :
= fluksi setiap kutub (Weber)
a
I = arus jangkar (Ampere) P = jumlah kutub
Z = jumlah konduktor A = cabang paralel
Dengan demikian di dalam motor DC , kecepatan berbanding lurus dengan GGL balik Ea
dan berbanding terbalik dengan fluks per kutub Φ.
Umumnya pada setiap motor, torsi dan kecepatan merupakan faktor yang sangat penting. Ketika torsi meningkat, kecepatan motor akan berkurang dan sebaliknya. Telah diketahui bahwa untuk motor DC berlaku [ B.L.Theraja hal 691] :
n = K
a a
t IR
V
= K
a
E
Ta ~ Ia
xxii II.8 Karakteristik Motor Arus SearahPenguatan Shunt
Karakteristik dari suatu motor layak diketahui, karena karakteristik dari suatu motor akan mencerminkan performansi (unjuk kerja) dari motor listrik tersebut selama kondisi operasinya. Pada motor arus searah penguatan shunt terdapat tiga karakteristik yakni antara lain: Karakteristik Torsi dan Arus Jangkar, Karakteristik Putaran dan Arus Jangkar, dan Karakteristik Torsi dan Putaran. Persamaan dasar motor DC adalah
m
Pada motor DC emf yang timbul dalam jangkar dinamakan back emf atau counter
emf. Untuk motor DC, tegangan sumber atau suplai selalu tetap.
Pada motor DC shunt untuk tegangan suplai konstant maka If juga konstant. Pada
Arus Jangkar Ia yang kecil pengaruh demagnetisasi dari reaksi jangkar biasanya dapat
diabaikan sehingga besar fluksi pada celah udara tidak terpengaruh. Untuk Ia yang besar
Untuk Motor Arus Searah berlaku :
Ea = Vt - IaRa
Dengan Vt dan If yang konstan maka kecepatan putaran motor hanya dipengaruhi
oleh perubahan IaRa drop dan dipengaruhi oleh demagnetisasi dari reaksi jangkar. Dengan
bertambahnya Ia, maka pengaruh dari demagnetisasi reaksi jangkar akan bertambah besar
yang akan berkurangnya besar fluksi medan penguatan maka kecepatan motor akan bertambah besar. Tetapi dengan bertambahnya Ia, maka besar IaRa akan bertambah
sehingga besar Vt - IaRa akan berkurang, akibatnya terjadi pengurangan besar fluksi
medan maka putaran motor DC shunt akan berkurang, dengan bertambah besarnya Ia
akan jatuh (berkurang) sedikit dari mo = kecepatan putaran pada beban nol. Karena pada
xxiv
a t m
K V
0 ...(2.28)
Dan pada kasus bila pengaruh reaksi jangkar diabaikan maka :
a a a t m
K R I
V
...(2.29)
Diperoleh : Ka. = konstan, sehingga kecepatan putaran motor akan jatuh lebih cepat
dengan bertambahnya Ia [ P.S. Bimbhra hal 471].
Gambar 2.11 Karakteristik Putaran – Arus Jangkar Pada Motor DC Shunt
II.8.2 Karakteristik Torsi – Arus Jangkar ( T/ Ia )
Dari rumus Te = Ka.. Ia menunjukkan jika fluksi adalah konstan (pada motor
DC shunt), maka besar torsi akan bertambah secara linear dengan bertambahnya Ia.
Tetapi bila Ia bertambah maka besar fluksi akan berkurang karena pengaruh
Gambar 2.12 Karakteristik Torsi – Arus Jangkar Pada Motor DC Shunt
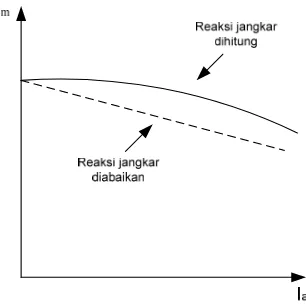
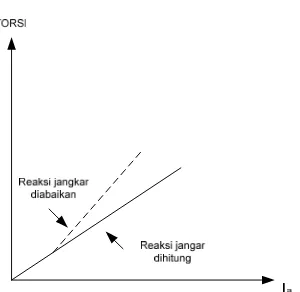
II.8.3 Karakteristik Torsi – Putaran ( T/n )
Karakteristik putaran torsi disebut juga sebagai karakteristik mekanik dan pada kondisi steady state (nominal) dapat diperoleh sebagai berikut :
Substitusikan harga Ia ke dalam persamaan (2.30) :
xxvi Maka dapat dilihat dengan pertambahan Te kecepatan putaran akan turun. Sehingga
untuk Te lebih besar, Ia lebih besar dibutuhkan, sehingga akan mengurangi besar
fluksi celah udara () yang disebabkan karena kejenuhan dan reaksi jangkar. Maka
dengan Te bertambah maka akan berkurang. 2
e
T
bertambah dengan perbandingan
yang lebih cepat dan putaran dari motor akan turun lebih cepat dibandingkan dengan kenaikan torsi mesin seperti diperlihatkan gambar di bawah ini. Jika pengaruh reaksi jangkar diabaikan maka (Ka.)2 nilainya konstan sehingga kecepatan putaran akan
berkurang dengan lambat seiring Pertambahan Te [P.S. Bimbhra hal 471]:
BAB III
PERHITUNGAN PANAS MOTOR DC SHUNT
PADA SAAT START DAN PENGEREMAN
III.1 Metode Retardasi Dalam Menentukan Momen Inersia Motor DC (J) III.1.1 Prinsip Dasar
Metode ini digunakan selain untuk menentukan J juga untuk menentukan rugi – rugi rotasi pada motor DC. Dengan menjalankan metode ini, maka dapat diketahui energi yang hilang akibat rugi – rugi rotasi dalam Motor DC shunt.
Anggap suatu motor DC shunt bekerja pada saat tanpa beban.
1. Jika suplai ke jangkar dilepas tetapi medan tetap dieksitasi normal, motor tersebut mulai melambat secara bertahap dan akhirnya berhenti. Energi kinetik jangkar digunakan untuk mengatasi rugi – rugi gesek dan angin dan rugi – rugi besi.
2. Jika suplai jangkar dan medan shunt dilepas bersamaan, motor juga akan melambat dan akhirnya berhenti. Sekarang juga energi kinetik jangkar digunakan hanya untuk mengatasi rugi – rugi gesekan dan angin. Ini diperkirakan karena tidak adanya fluks sehingga tidak ada rugi – rugi besi.
Dengan menjalankan pengujian yang pertama, kita akan mendapatkan nilai rugi – rugi gesek, angin dan besi. Namun demikian, jika kita juga menjalankan pengujian yang kedua, kita dapat memisahkan antara rugi – rugi gesek dan angin dengan rugi – rugi besi. Energi kinetik jangkar ditentukan dengan persamaan :
2
2 1
J
xxviii
Maka di dalam metode retardasi ini, laju perubahan energi kinetik dianggap untuk mengatasi rugi – rugi rotasi motor. Jika laju perubahan energi kinetik ini disimbolkan dengan w, maka
Dengan mengetahui nilai momen inersia jangkar (J) dan nilai perubahankecepatan( )
dt d
atau
dt dn
dari percobaan, maka perhitungan rugi – rugi rotasi pada Motor DC shunt dapat ditentukan.
III.1.2 Metode Pengukuran Momen Inersia Pada Jangkar (J)
Di dalam uji retardasi, rugi – rugi rotasi motor di berikan dengan persamaan
jangkar motor tersebut. Percobaan ini disebut dengan metode roda pejal. Mula – mula, pengujian retardasi dilakukan dengan rotor sendiri dan nilai dn/dt1.diukur dan dicatat.
Selanjutnya, sebuah roda pejal yang diketahui momen inersianya (J1) dikuncikan ke
ujung poros motor. Untuk perubahan kecepatan yang sama, dn/dt2 dicatat. Karena
penambahan roda pejal tidak mempengaruhi rugi-rugi rotasi secara materialnya dari kedua kasus maka,
xxx III.2 Rugi – Rugi Motor Arus Searah
III.2.1 Umum
Motor DC menerima daya masukan berupa energi listrik dan menghasilkan daya keluaran berupa energi mekanis. Akan tetapi, tidak seluruh daya masukan ke motor diubah menjadi daya keluaran yang berguna, selalu ada energi yang hilang selama proses pengkonversian energi tersebut. Energi yang hilang tersebut ada yang dikonversikan menjadi panas dan ada yang diserap oleh mesin untuk mengatasi gesekan karena adanya bagian yang berputar di dalam mesin. Rugi-rugi daya dalam bentuk panas ini jika nilainya terlalu besar akan dapat menyebabkan kenaikan temperatur motor yang dapat merusak isolasi, mempercepat berkurangnya umur ekonomis motor sehingga membatasi daya keluaran motor. Berikut ini proses pengkonversian energi pada motor DC shunt dalam diagram aliran daya di bawah ini [V.K.Mehta dan Rohit Mehta hal 86] :
Gambar 3.1 Diagram Aliran Daya pada Motor Arus Searah
Dengan demikian selalu ada selisih antara daya masukan dan daya keluaran motor. Ini merupakan rugi-rugi daya yang terjadi di dalam motor. Dalam persamaan dinyatakan dengan :
dimana selisih daya tersebut berubah menjadi bentuk energi yang lain yang tidak dapat digunakan bahkan dapat merugikan bagi motor itu sendiri.
III.2.2 Jenis Rugi – Rugi Di Dalam Motor Arus Searah III.2.2.1 Rugi-Rugi Tembaga (Copper losses)
Rugi-rugi tembaga adalah rugi-rugi daya yang terjadi di dalam kumparan medan dan kumparan jangkar motor. Karena kawat tembaga kedua kumparan tersebut memiliki nilai resistansi Rf dan Ra, maka jika mengalir arus DC sebesar If dan Ia akan
menyebabkan kerugian daya yang dihitung dengan persamaan :
Pa = Ia2Ra………....…...….……. .(3.7)
dan
Pf = If2Rf………..…..…...……..(3.8)
Di mana : Pa = rugi tembaga kumparan jangkar
Pf = rugi tembaga kumparan medan
Ia = arus jangkar Ra = resistansi jangkar
If = arus medan Rf = resistansi medan
III.2.2.2 Rugi-Rugi Inti (core or iron losses)
Rugi-rugi inti terjadi di dalam jangkar motor DC yang disebabkan oleh perputaran jangkar di dalam medan magnet kutub-kutubnya. Ada dua jenis rugi-rugi inti yaitu (1) rugi hysteresis dan (2) rugi arus pusar.
xxxii Rugi hysteresis terjadi di dalam jangkar mesin DC karena setiap bagian jangkar dipengaruhi oleh pembalikan medan magnetik sebagaimana bagian tersebut lewat di bawah kutub-kutub yang berurut.
Gambar 3.2 Perputaran jangkar di dalam motor dua kutub
Gambar 3.2 menunjukkan jangkar yang berputar di dalam motor dua kutub. Dengan menganggap ab sebagai potongan kecil dari jangkar. Ketika potongan ab berada di bawah kutub N, garis-garis magnetik lewat dari a ke b. Setengah perputaran selanjutnya, dari potongan besi yang sama berada di bawah kutub S dan garis-garis magnetik lewat dari b ke a sehingga sifat magnet di dalam besi dibalik.
Untuk dapat membalik molekul-molekul magnet secara terus menerus di dalam inti jangkar, sejumlah daya diserap sehingga menyebabkan pemanasan pada inti jangkar. Daya yang diserap dan berubah menjadi panas tersebut dianggap sebagai rugi-rugi di dalam inti jangkar dan disebut sebagai rugi hysteresis. Untuk menentukan besarnya rugi hysteresis di dalam inti jangkar digunakan persamaan Steinmentz yaitu :
Ph = ηB1max,6 fV Watt………...(3.9)
Dimana : Ph = rugi hysteresis
Bmax = rapat fluks maksimum di dalam jangkar f = frekuensi pembalikan magnetik
=
120 P n
dimana n dalam rpm dan P = jumlah kutub
η = koefisien hysteresis Steinmentz 2). Rugi Arus Pusar
Sebagai tambahan terhadap tegangan yang diinduksikan di dalam konduktor jangkar, ada juga tegangan yang diinduksikan di dalam inti jangkar. Tegangan ini menghasilkan arus yang bersirkulasi di dalam inti jangkar seperti yang ditunjukkan dalam Gambar 3.3. Ini disebut sebagai arus pusar (eddy current) dan daya yang hilang karena alirannya disebut dengan rugi arus pusar.
Rugi arus pusar berlaku sebagai panas yang dapat menaikkan temperatur motor dan menurunkan efisiensinya. Jika suatu inti besi padat digunakan sebagai inti jangkar, resistansi terhadap arus pusar ini akan menjadi kecil karena lebarnya luas penampang inti. Akibatnya, nilai arus pusar dan juga rugi arus pusarnya akan menjadi besar. Besarnya nilai arus pusar dapat dikurangi dengan membuat resistansi inti sebesar mungkin secara praktisnya.
Gambar 3.3 (a) Arus pusar di dalam inti jangkar yang padat (b) Arus pusar di dalam inti jangkar yang dilaminasi
xxxiv III.2.2.3 Rugi-Rugi Mekanis (mechanical losses)
Rugi-rugi mekanis di dalam motor DC merupakan rugi-rugi yang berhubungan dengan efek-efek mekanis. Ada dua bentuk dasar rugi-rugi mekanis di dalam motor DC yaitu gesekan dan angin.
Rugi-rugi gesekan adalah rugi-rugi yang disebabkan oleh pergesekan antara permukaan bagian-bagian yang berputar dengan bagian-bagian yang diam dari motor, diantaranya gesekan bearing atau bantalan peluru dengan rumah bearing atau dengan as rotor. Juga gesekan antara permukaan sikat dengan komutator. Karena adanya suatu nilai koefisien gesek antara permukaan bagian-bagian tersebut, walaupun kecil, diperlukan gaya untuk mengimbangi gaya lawan akibat koefisien gesek tersebut jika ingin menggerakkan rotor motor DC tersebut.
Sedangkan rugi-rugi angin adalah rugi-rugi yang disebabkan oleh pergesekan antara bagian-bagian motor yang berputar dengan udara di dalam rumah (casing) motor. Baik itu pergesekan antara permukaan rotor dengan udara pada celah udara di dalam motor ataupun gesekan udara dengan kipas pendingin yang dipasangkan pada rotor di dalam motor. Rugi-rugi angin ini bervariasi tergantung pada kecepatan rotasi motor tersebut.
III.2.2.4 Rugi – rugi sikat (brush losses)
Jika kumparan jangkar motor DC dialiri arus listrik DC maka sikat-sikatnya juga akan dialiri arus yang sama. Karena sikat memiliki nilai resistansi sikat dan juga tahanan kontak antara permukaan sikat dengan komutator maka terdapat rugi jatuh tegangan pada sikat yang dinyatakan dengan Vbd. Jatuh tegangan sikat ini menyebabkan
Pbd = Vbd.Ia………..…...……....(3.10)
Dimana : Pbd = rugi daya akibat jatuh tegangan sikat Ia = arus jangkar
Vbd = jatuh tegangan sikat
Besarnya nilai jatuh tegangan sikat-sikat pada motor DC hampir konstan dalam rentang arus jangkar yang besar. Maka rugi – rugi sikat dapat dihitung dengan persamaan:
Pbd = 2 x Ia ………...…..…...(3.11)
III.2.2.5 Rugi-Rugi Beban Stray (stray load load losses)
Rugi-rugi beban stray merupakan rugi-rugi yang disebabkan oleh arus pusar di dalam tembaga dan rugi-rugi inti tambahan di dalam besi, yang timbul karena pendistorsian fluks magnetik oleh arus beban (tidak termasuk yang disebabkan oleh jatuh tegangan IR) dan rugi-rugi hubung singkat komutasi.
Rugi-rugi beban stray ini tidak dapat dikategorikan ke dalam tipe rugi-rugi yang disebutkan di atas. Di dalam perhitungan rugi-rugi motor DC, besarnya rugi-rugi beban stray dinyatakan sebesar ± 1% dari beban penuh.
Rugi-rugi di dalam motor DC di atas juga dapat dikelompokkan menjadi dua kelompok yaitu :
1. Rugi-rugi konstan yaitu rugi-rugi di dalam motor DC yang nilainya selalu tetap, tidak tergantung pada arus pembebanan. Rugi – rugi inti + mekanis disebut dengan rugi – rugi rotasi.Yang termasuk ke dalam kelompok rugi-rugi konstan adalah :
xxxvi 2. Rugi-rugi variabel yaitu rugi-rugi di dalam motor DC yang nilainya bervariasi
terhadap arus pembebanan.Yang termasuk ke dalam kelompok rugi-rugi ini adalah : a. Rugi-rugi tembaga kumparan jangkar (Ia2Ra)
b. Rugi-rugi tembaga kumparan medan seri (Ia2Rse)
c. Rugi jatuh tegangan sikat (VbdIa)
Sehingga rugi-rugi total di dalam motor DC adalah :
Σ Rugi – Rugi = Rugi Konstan + Rugi Variabel……...(3.12)
III.2.3 Penentuan Rugi-Rugi Di Dalam Motor Arus Searah III.2.3.1 Umum
Besarnya nilai rugi-rugi di dalam motor DC dapat diketahui melalui perhitungan setelah mengetahui nilai parameter-parameter mesin seperti tahanan kumparan jangkar, tahanan kumparan medan, arus jangkar, arus medan, jatuh tegangan sikat, efisiensi dan parameter-parameter lainnya. Atau, dapat juga diketahui dengan melakukan suatu pengujian rugi-rugi terhadap motor DC tersebut. Dari hasil pengujian rugi-rugi ini dapat diketahui besarnya nilai rugi-rugi di dalam motor dengan lebih spesifik.
III.2.3.2 Penentuan Rugi-Rugi Konstan Motor Arus Searah
Untuk mengetahui nilai rugi-rugi konstan di dalam motor DC ada beberapa metode pengujian yang dapat dilaksanakan, salah satunya adalah dengan menggunakan metode retardasi yaitu metode retardasi dengan pembebanan listrik.
Di dalam metode ini, J dieleminasi dari persamaan diatas dengan melakukan sebuah percobaan. Mula – mula pengujian retardasi dilakukan dengan jangkar sendiri. Besarnya rugi – rugi rotasi diberikan dengan persamaan. Selanjutnya motor dibebani dengan sejumlah daya W’ yang diketahui besarnya dengan suatu pengereman secara elektris. Tentunya dengan melakukan pengereman ini akan memberikan suatu perlambatan yang lebih cepat. Untuk penurunan kecepatan yang sama seperti pada percobaan yang pertama, waktunya juga di catat maka,
W + W’ = 0,011 J
Karena nilai W’, t1dan t2diketahui, maka rugi – rugi konstan motor dapat ditentukan.
xxxviii jangkar didisipasikan di dalam R yang berlaku sebagai torka perlambatan untuk memperlambat perputaran jangkar.
Gambar 3.4 Rangkaian Percobaan Pembebanan Elektris Dalam Pengujian Retardasi
Dari percobaan pembebanan elektris ini akan diperoleh besarnya daya yang didisipasikan di dalam R sebagai rugi – rugi daya tambahan sebagai berikut :
W’ = V’ x Ia’ Watt...(3.15) Dimana : W’ = rugi – rugi daya tambahan
V’ = tegangan rata - rata pada R Ia’ = arus rata – rata yang melalui R
Selanjutnya rugi – rugi tambahan W’ ini digunakan dalam persamaan untuk mendapatkan nilai inersia jangkar dan rugi – rugi konstan motor.
III.2.3.3 Penentuan Rugi-Rugi Variabel Motor Arus Searah
Sebagaimana telah disebutkan di atas bahwa rugi-rugi variabel tergantung pada pembebanan motor. Seiring dengan pertambahan beban motor maka arus pembebanan (Ia) pada pada motor juga akan meningkat. Karena rugi-rugi tembaga
besarnya arus beban, maka rugi-rugi ini akan bertambah dengan meningkatnya arus pembebanan di dalam motor.
Oleh karena itu, dengan mengetahui nilai tahanan kumparan jangkar, tahanan kumparan medan seri dan jatuh tegangan sikat serta besarnya arus pembebanan, rugi-rugi variabel dapat ditentukan dengan perhitungan menggunakan persamaan rugi-rugi variabel di atas.
III.3 Metode Perhitungan Panas Motor DC Shunt Pada Saat Start III.3.1 Prinsip Dasar
Start motor yang digunakan pada percobaan ini adalah start langsung. Start langsung (direct on line) digunakan karena dalam percobaan ini motor DC shunt mempunyai rating daya keluaran 1.2 kW. Berdasarkan S.K. Pillai hal 86 maka, start langsung digunakan untuk motor DC yang mempunyai rating daya keluaran sampai 2 kW.
Start dengan cara langsung adalah menghubungkan motor secara langsung dengan jala – jala. Pada waktu start motor belum berputar sama sekali, hal ini berarti bahwa ggl lawan adalah nol, karena jangkar belum berputar (r= 0 ). Akibatnya, jika motor langsung dihubungkan dengan tegangan jala – jala maka tegangan jala – jala (Vt)
xl
Gambar 3.5 Start Motor Arus Searah penguatan Shunt secara langsung Berdasarkan gambar diatas diperoleh : Vt = E + IaRa, Pada keadaan start Ea = 0, maka Vt
III.3.2 Hubungan Energi (W) Selama Start
Pada saat start n = 0, maka rugi – rugi gesek + angin adalah nol, rugi – rugi yang terjadi pada saat start salah satunya adalah rugi – rugi tembaga yaitu pada kumparan jangkar dan kumparan medan karena kawat tembaga kedua kumparan memiliki tahanan Ra dan Rf sehingga pada saat start mengalir arus Ia dan If pada kedua kumparan.
Rugi – rugi yang berbentuk panas juga terjadi pada inti karena pada saat start terminal jangkar dihubungkan ke sumber tegangan (Vt) sehingga secara otomatis Vt
terhubung terhadap kumparan medan motor. Oleh karena itu, pada kumparan medan akan timbul fluks sehingga akan menghasilkan Ea, Ea inilah yang akan menimbulkan rugi –
inti jangkar yang berupa Ea menghasilkan arus yang bersikulasi pada inti jangkar
sehingga terjadi rugi arus pusar (eddy current).
Rugi rugi sikat juga terjadi pada saat start karena pada saat start kumparan jangkar dialiri oleh arus start maka sikat – sikatnya juga kan dialiri oleh arus yang sama. Sikat mempunyai tahanan kontak antara permukaan sikat dan komutator sehingga jika mengalir arus pada sikat maka akan terjadi rugi jatuh tegangan sikat. Dan rugi rugi yang terakhir adalah rugi stray yang nilainya sudah ditetapkan dari arus start jangkar. Energi yang hilang selama start akibat dari rugi – rugi yang berupa panas dapat dihitung berdasarkan persamaan berikut :
Wst = (Wcu a + Wcu sh + Wcore + Wbrush + Wstray) Joule...(3.17) Dimana : Wst = Energi yang hilang pada saat start akibat rugi – rugi yang berbentuk
panas meliputi rugi – rugi tembaga, inti, sikat dan stray.
III.4 Metode Perhitungan Panas Motor DC Shunt Pada Saat Pengereman. III.4.1 Prinsip Dasar
Dalam tugas akhir ini pengereman yang akan dilakukan adalah pengereman dinamik. Rangkaian pengereman dinamik pada motor arus searah ditunjukan pada Gambar 3.6 di bawah ini :
xlii Pada saat motor sedang berputar, arus jangkar dilepaskan dari sumber tegangan sehingga motor tidak lagi mendapat daya dari jala-jala. Pada keadaan ini, dimana belitan medan tetap terhubung ke sumber dan motor akan menjadi generator. Motor ini akan membangkitkan tegangan induksi sebesar Ea cn.
Pada saat bersamaan pada terminal jangkar dipasangkan sebuah tahanan sebagai tahanan pengereman. Dengan demikian arus akan mengalir melalui tahanan. Hal ini menyebabkan energi yang dimiliki oleh jangkar yang berputar akan dilepaskan secara cepat dalam bentuk panas melalui tahanan. Sebelum pengereman, pers umum motor DC shunt :
Setelah pengereman, sumber tegangan ke jangkar dilepas dan terhubung dengan tahanan pengereman sehingga arus pengereman melalui tahanan, pers menjadi:
Irem =
Tanda (-) menunjukkan bahwa arus mengalir ke arah yang berlawanan yaitu balik ke arah sumber tegangan yang dimana sekarang sudah dihubungkan dengan tahanan pengereman. Sedangkan torsi motor dc shunt dapat dicari dengan persamaan :
TM = KIa...(3.20)
Trem =
rem
a R
R C n
2 ...(3.21)
Dari persamaan dapat diketahui Trem berbanding terbalik dengan Rrem dimana Ra konstan.
Jika Rrem makin kecil maka Trem semakin besar tetapi waktu pengereman semakin cepat
Sedangkan jika Rrem makin besar maka Trem semakin kecil tetapi waktu pengereman
semakin lama. Kemudian dari persamaan dapat diketahui putaran motor berbanding lurus dengan Trem dan berbanding terbalik dengan Rrem.
III.4.2 Hubungan Energi (W) Selama pengereman
Pada saat pengereman terminal jangkar dipasangkan sebuah tahanan sebagai tahanan pengereman. Dengan demikian arus akan mengalir melalui tahanan. Hal ini menyebabkan energi yang dimiliki oleh jangkar yang berputar akan dilepaskan secara cepat dalam bentuk panas melalui tahanan sehingga rugi rugi pada pengereman dinamik terjadi pada tahanan pengereman yang dihubungkan pada jangkar tersebut. Dengan demikian, dari persamaan diatas dapat diketahui bahwa energi yang hilang selama pengereman adalah sebesar Wbr. Pada saat pengereman, motor masih berputar sebelum
berhenti sehingga dapat diketahui pada pengereman terjadi rugi – rugi gesek + angin. Rugi – rugi yang terjadi pada saat pengereman salah satunya rugi – rugi tembaga tetapi pada kumparan medan saja karena pada pengereman dinamik, pada saat motor sedang berputar, arus jangkar dilepaskan dari sumber tegangan sehingga motor tidak lagi mendapat daya dari jala-jala. Pada keadaan ini, kumparan medan tetap terhubung ke sumber dan sehingga motor ini akan membangkitkan tegangan induksi sebesar
cn
xliv Rugi – rugi yang berbentuk panas juga terjadi pada inti karena pada saat pengereman terminal jangkar masih terhubung kepada kumparan medan motor. Oleh karena itu, pada kumparan medan akan timbul fluks sehingga akan menghasilkan Ea, Ea
inilah yang akan menimbulkan rugi – rugi pada inti yaitu rugi – rugi histeresis dan eddy current.
Dan rugi rugi yang terakhir adalah rugi stray yang nilainya sudah ditetapkan. Energi yang hilang selama pengereman akibat dari rugi – rugi yang berupa panas dapat dihitung berdasarkan persamaan berikut :
Wbr = Wcu a + Wcu sh + Wcore + Wbrush + Wstray + Wmekanis Joule...(3.22) Dimana : Wbr = Energi yang hilang pada saat pengereman akibat rugi – rugi yang
BAB IV
ANALISIS PERHITUNGAN PANAS MOTOR DC SHUNT PADA SAAT START DAN PENGEREMAN
IV.1 Pengujian Motor DC Shunt dengan Metode Retardasi dan Pengukuran Tahanan Belitan Motor
IV.1.1 Umum
Metode retardasi digunakan untuk menentukan momen inersia pada motor. Metode ini juga digunakan untuk menentukan rugi – rugi konstan yaitu rugi – rugi besi dan mekanis (gesek + angin).
IV.1.2 Spesifikasi Motor
Uji retardasi yang dilaksanakan di laboratorium Konversi Energi Listrik FT USU diterapkan pada motor DC penguatan shunt untuk rating sebagai berikut :
Tegangan nominal : 220 Volt Arus medan nominal : 0.64 Ampere Putaran nominal : 1000 rpm
IV.1.3 Peralatan pengujian
Peralatan yang dipergunakan dalam pengujian ini terdiri dari : a. Roda Pejal dengan massa 6,5 kg, diameter 26 cm.
xlvi c. Instrumen Pengukuran terdiri dari amperemeter, voltmeter, tachometer, dan
stopwatch
d. Power Suplai terdiri dari PTAC Tiga phasa, PTDC dan Penyearah Dioda Tiga Phasa Gelombang Penuh
e. Resistor Variabel.
Gambar 4.1 Roda Pejal
IV.1.4 Prosedur Percobaan
Di dalam ujian retardasi ini, dilakukan beberapa pengujian diantaranya : 1. Uji retardasi dengan rotor sendiri tanpa eksitasi
2. Uji retardasi dengan roda pejal tanpa eksitasi 3. Uji retardasi dengan rotor sendiri eksitasi penuh 4. Uji retardasi dengan roda pejal eksitasi penuh
Selain pengujian di atas dilakukan juga pengujian lainnya yaitu : 1) Pengukuran tahanan jangkar motor
Rangkaian kontrol dalam uji retardasi ini ditunjukkan pada gambar berikut :
Gambar 4.2 Rangkaian Kontrol
Adapun prosedur pengujian – pengujian diatas dilaksanakan sebagai berikut: IV.1.4.1 Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi.
1) Rangkaian percobaan disusun seperti gambar berikut.
Gambar 4.3 Rangkaian percobaan uji retardasi dengan rotor sendiri tanpa eksitasi 2) Posisi Power supply dalam keadaan minimum dan tahanan seri variabel RLse
maksimum. Kemudian saklar S ditutup lalu tombol ON ditekan.
3) Tegangan terminal motor dinaikkan dengan mengatur PTAC hingga pembacaan voltmeter V sebesar 220 volt dan amperemeter A2 sebesar 0,64 Ampere.
4) Atur tahanan RLse hingga putaran motor mencapai nominal 1050 rpm.
xlviii 950 diukur dengan stopwatch. Kemudian pembacaan waktu stopwatch dicatat. Percobaan diulang kembali seperti pada poin 2 sampai poin 5 sebanyak 10 kali.
IV.1.4.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi.
1) Rangkaian percobaan disusun seperti gambar dibawah ini. Roda pejal dipasang ke ujung poros rotor lalu dikunci.
P
T
A
C
3Φ
M R
S
T
S
+
-M
M M
M
v
A1
A2
RLse
Gambar 4.4 Rangkaian percobaan uji retardasi dengan roda pejal tanpa eksitasi
2) Sama seperti prosedur percobaan uji retardasi dengan rotor sendiri tanpa eksitasi sampai langkah 5.
IV.1.4.3 Uji Retardasi dengan Rotor Sendiri Eksitasi Penuh 1) Rangkaian percobaan disusun seperti gambar berikut.
2) Sama seperti prosedur percobaan uji retardasi dengan rotor sendiri tanpa eksitasi sampai langkah 4.
3) Motor dibiarkan berputar dengan kecepatan 1050 rpm dalam beberapa saat, lalu bersiap – siap menekan tombol stop dan menjalankan stopwatch bersamaan. Setelah tombol OFF ditekan, maka suplai tegangan ke jangkar motor akan terlepas sedangkan suplai medan tetap dipertahankan, maka motor akan mengalami perlambatan. Waktu penurunan kecepatan motor dari 1050 rpm sampai 950 diukur dengan stopwatch. Kemudian pembacaan waktu stopwatch dicatat. Percobaan diulang kembali seperti pada poin 2 sampai poin 5 sebanyak 10 kali.
IV.1.4.4 Uji Retardasi dengan Roda Pejal Eksitasi Penuh
1) Rangkaian percobaan disusun seperti gambar dibawah ini. Roda pejal dipasang ke ujung poros rotor lalu dikunci.
P
Gambar 4.6 Rangkaian percobaan uji retardasi dengan roda pejal eksitasi penuh 2) Sama seperti prosedur percobaan uji retardasi dengan rotor sendiri eksitasi penuh
sampai langkah 5.
IV.1.4.5 Pengukuran Tahanan Jangkar Motor
l 3) Saklar S ditutup, lalu tegangan PTDC dinaikkan sampai pembacaan amperemeter
menunjukkan arus nominal jangkar 6 Ampere
4) Kemudian pembacaan voltmeter dan amperemeter dicatat. Lalu nilai tahanan jangkar dihitung dengan membagi nilai tegangan dengan arus dari hasil percobaan.
Gambar 4.7 Rangkaian percobaan pengukuran tahanan jangkar IV.1.4.6 Pengukuran Tahanan Medan Shunt Motor
1) Rangkaian percobaan disusun seperti gambar di bawah ini. 2) Power suplai dalam posisi minimum.
3) Saklar S ditutup, lalu tegangan PTAC dinaikkan sampai pembacaan amperemeter menunjukkan arus nominal medan 0.64 Ampere
4) Kemudian pembacaan voltmeter dan amperemeter dicatat. Lalu nilai tahanan jangkar dihitung dengan membagi nilai tegangan dengan arus dari hasil percobaan.
IV.1.5 Data Hasil Pengujian
Dari hasil pengujian di atas diperoleh data hasil percobaan sebagai berikut. a) Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi (dn=1050 - 950 rpm)
No. Perc dt1 (s) No. Perc dt1 (s)
I 1.44 VI 1.45
II 1.45 VII 1.42 III 1.43 VIII 1.44 IV 1.44 IX 1.43 V 1.41 X 1.45
dt1 rata – rata = 1.44 s
Tabel 4.1 Uji Retardasi dengan Rotor Sendiri tanpa Eksitasi b) Uji Retardasi dengan Roda Pejal tanpa Eksitasi (dn = 1050 - 950 rpm)
No. Perc dt1 (s) No. Perc dt1 (s)
I 5.57 VI 5.50
II 5.57 VII 5.52 III 5.55 VIII 5.60 IV 5.59 IX 5.57 V 5.53 X 5.55
dt1 rata – rata = 5.56 s
Tabel 4.2 Uji Retardasi dengan Roda Pejal tanpa Eksitasi
c) Uji Retardasi dengan Rotor sendiri Eksitasi penuh (dn =1050 – 950 rpm) No. Perc dt1 (s) No. Perc dt1 (s)
I 0.34 VI 0.32
II 0.35 VII 0.34 III 0.35 VIII 0.33 IV 0.30 IX 0.35 V 0.33 X 0.34
dt1 rata – rata = 0.33 s
lii d) Uji Retardasi dengan Roda Pejal Eksitasi penuh (dn = 1050 – 950 rpm)
No. Perc dt1 (s) No. Perc dt1 (s)
Tabel 4.4 Uji Retardasi dengan Roda Pejal Eksitasi penuh e) Pengukuran Tahanan Jangkar Motor
V (volt) I (Ampere) R = f) Pengukuran Tahanan Medan Shunt Motor
V (volt) I (Ampere) R =
I V
(ohm) 210 0.64 333,33 Tabel 4.6 Pengukuran Tahanan Medan Shunt Motor
IV.1.6 Analisa Data Pengujian
IV.1.6.1 Perhitungan Momen Inersia Motor DC Shunt
Data hasil pengujian yang diperoleh dapat dianalisa sebagai berikut. Dari data a dan b dapat ditentukan besarnya nilai momen inersia jangkar motor. Sebagaimana telah dijelaskan dalam BAB III bahwa inersia jangkar motor dapat dihitung dengan persamaan:
Dimana : J1 = Momen Inersia jangkar motor (Kgm2)
J2 = Momen Inersia roda pejal yang dihitung dengan persamaan :
J = 2
2 1
Mr (Kgm2)
t1 = selang waktu yang dibutuhkan untuk penurunan kecepatan jangkar motor
dengan rotor sendiri dalam kondisi tanpa eksitasi (detik)
t2 = selang waktu yang dibutuhkan untuk penurunan kecepatan jangkar
motor dengan roda pejal dalam kondisi tanpa eksitasi (detik)
Dari data perhitungan diketahui J2 = 0,055 Kgm2 dan dari data pengamatan diperoleh t1=
1,44 s dan t2 = 5,56 s, sehingga
Jadi, momen inersia jangkar motor DC shunt tersebut adalah 0,019 Kgm2.
IV.1.6.2 Perhitungan Rugi – Rugi Rotasi Motor DC Shunt
Dengan diketahuinya momen inersia jangkar motor maka rugi – rugi rotasi motor dapat dihitung sebagai berikut.
liv Dari hasil perhitungan diatas diperoleh nilai rugi gesek angin motor rata – rata 14,58 Watt. Selanjutnya dari percobaan c dan d dapat diketahui besarnya rugi – rugi rotasi motor untuk kecepatan nominal 1000 rpm sebagai berikut :
wrot = 0,011 x J1 x n x
Dari hasil perhitungan diatas diperoleh nilai rugi rotasi motor rata – rata 63,71 Watt. Kemudian dari hasil perhitungan rugi – rugi rotasi diatas dapat ditentukan nilai rugi – rugi inti di dalam motor untuk rating putaran 1000 rpm dan arus medan shunt 0.64 Ampere yaitu :
winti = wrot – wg+a = 63,71 – 14,58 = 49,13 Watt
IV.2 Analisis Perhitungan Panas Motor DC Shunt Pada Saat Start Dan Pengereman
IV.2.1 Umum
gesekan karena adanya bagian yang berputar di dalam mesin. Panas yang di hitung pada Motor DC Shunt yaitu hanya pada saat motor start dan saat pengereman, dimana motor akan dibebani dengan pembebanan listrik.
Dalam penentuan rugi – rugi konstan pada motor DC Shunt, Penulis menggunakan metode retardasi sehingga harus di cari terlebih dahulu momen Inersia J motor tersebut.
IV.2.2 Spesifikasi Motor DC Shunt
Pengujian Perhitungan Panas Pada Motor DC Shunt pada saat Start dan Pengereman yang dilaksanakan di laboratorium Konversi Energi Listrik FT USU diterapkan pada :
Motor DC Shunt dengan rating sebagai berikut :
P = 2 kW
IL = 9,1 A
Ish = 0.64 A
n = 1500 rpm
Tahanan medan shunt (J-K) = 333,33 Tahanan Jangkar (GA-HB) = `1,5
Karena pembebanan Motor DC Shunt adalah pembebanan listrik, dimana beban listrik tersebut berupa tahanan geser yang akan dihubungkan dengan generator DC, maka kita harus mengetahui juga spesifikasi dari generator DC tersebut. Generator DC yang digunakan dalam percobaan ini adalah generator DC penguatan bebas dengan rating sebagai berikut :
P = 1,2 kW
lvi
Ish = 0.177 A
n = 1400 rpm
Tahanan medan shunt (J-K) = 1,257 k Tahanan Jangkar (GA-HB) = 3,8
IV.2.3 Peralatan Percobaan
1. 1 unit Motor Arus Searah AEG 2 kW 2. 1 unit Generator Arus Searah AEG 1,2 kW 3. 2 unit PTAC
4. 1 unit PTDC 5. 2 Volt meter 6. 5 Ampere meter 7. Kabel Penghubung 8. 1 Tacho meter
9. 1 Push button ON / OF
10.1 Magnetik Kontaktor, 2 NO dan 2 NC 11.Tahanan Geser
12.2 Penyearah Dioda Tiga Phasa Gelombang Penuh
Pengambilan data dari percobaan dilakukan dengan cara manual yaitu dengan menggunakan stopwatch yaitu untuk mengetahui waktu start dan pengereman pada Motor DC Shunt.
IV.2.4 Rangkaian Percobaan
Rangkaian kontrol dalam percobaan ini ditunjukkan pada gambar berikut :
Gambar 4.10 Rangkaian Percobaan Perhitungan Panas Motor DCShunt Pada Saat Start dan Pengereman
IV.2.5 Prosedur Percobaan
1. Buat rangkaian seperti gambar di atas
2. Buat Rfsh motor pada suatu harga tertentu ( lebih besar dari tahanan minimum) dan
tahanan luar RLse maksimum.
3. Pada Posisi PTDC 1 minimum tutup S1, kemudian naikkan tegangan Vin secara
lviii 4. Tekan tombol PB ON, maka relay M diberi energi sehingga akan mengerjakan
seluruh kontaktor – kontaktor M. Oleh karena itu, kontak NO akan menjadi NC dan NC akan menjadi NO. Motor mulai jalan dan arus mulai mengalir. Catat Ia start dan ukur waktu start dengan stopwatch serta putaran awal motor.
5. Setelah motor mulai jalan, motor akan mengalami percepatan dari keadaan start menuju keadaan steady state. Atur tahanan Rfsh dan minimumkan RLse untuk
mendapatkan Ish ,Vin dan n yang nominal. Catat Vin, n, Ish dan Ia.
6. Pada saat If generator = 0, tutup S2 dan naikkan If generator sampai 0,177 A dan
V2 nominal.
7. Pada Posisi RL maksimum , tutup S3.
8. Beban generator diatur dengan menggeser tahanan variabel RL sehingga
mendekati beban penuh motor yaitu mencapai putaran 1000 rpm dengan mempertahankan Vin dan Ish nominal motor.
9. Pembacaan voltmeter V1 ,amperemeter A1 dan A2 dan putaran motor dicatat pada
kondisi pembebanan tersebut sehingga diperoleh data pembebanan untuk tegangan dan arus medan yang nominal.
10.Perhatikan data – data motor sebelum direm. jaga harga Ish motor tetap konstan
dengan mengatur Rfsh karena pengereman yang akan dilakukan adalah
pengereman dinamik dengan Ish konstan, jika sudah mendekati beban penuh tekan
tombol PB OFF .Maka kontaktor NO menjadi NC dan NC menjadi NO sehingga motor akan terhubung dengan tahanan pengereman yang diatur. Catat Ia rem dan waktu pengereman.
IV.2.6 Analisa Data Percobaan
IV.2.6.1 Perhitungan Panas Motor DC Shunt pada saat Start Data – data pada keadaan motor sesaat setelah di start diperoleh : 1. Vt : 220 Volt
yang sangat besar maka pada motor dipasang tahanan yang dihubungkan seri dengan jangkar. Dimana nilai tahanan tersebut adalah 28,57 ohm
Ia start :
Maka, energi yang hilang selama start akibat dari rugi – rugi yang berupa panas dapat dihitung berdasarkan persamaan berikut :
1. Wcu a = (Ia start)2x Ra x tstart = ( 7,3)2 .1,5 . 0,5 = 39,97 J
2. Wcu shunt = (Ish2 x Rsh x tstart) = {(0.64)2.333,33.0.5} = 68,27 J
3. Wcore = 49,13 x 0.5 = 24.565 J
4. Wbrush = 2.Iastart. tstart =( 2.7,3.0,5) = 7,3 J
5. Wstray = 1 % x 2000 x 0.5 = 10 J
sehingga energi yang hilang ( Wstart ) pada saat start adalah :
Wst = (Wcu a + Wcu sh + Wcore + Wbrush + Wstray) Joule
lx Setelah keadaan start, motor akan menuju ke keadaan steady state. Pada kondisi inilah motor mulai melayani beban sehingga putaran motor akan mengalami penurunan dan torsi motor akan mulai naik. Motor akan mengalami pengereman setelah pembebanan motor sudah mendekati beban penuh atau ¾ beban penuh nya. Dimana data – data motor saat pembebanan ¾ beban penuh adalah sebagai berikut :
Data berbeban : Vin = 220 V Ish = 0,64 A
Ia = 6,8 A n = 1000 rpm Untuk selanjutnya dihitung :
- Daya masukan motor : Vin.IL = 220.(6,8 + 0.64) = 1636.8 Watt Sehingga diperoleh efisiensi motor DC shunt sebesar :
n
IV.2.6.2 Perhitungan Panas Motor DC Shunt pada saat Pengereman
Setelah motor beroperasi hingga 3/4 beban penuhnya maka motor akan siap – siap untuk di rem. Pengereman yang digunakan adalah pengereman dinamik.
Data – data dari Motor DC Shunt yang diperoleh pada saat pengereman : 1. Vt : 220 Volt
Energi yang hilang selama pengereman akibat dari rugi – rugi yang berupa panas dapat dihitung berdasarkan persamaan berikut :
lxii 2. Wcu shunt = (Ish2 x Rsh x tstart) = {(0.64)2.333,33.1,76} = 240,29 J
3. Wcore = 49,13 x 1,76 = 86,47 J
4. Wbrush = 2.Ia rem. trem =( 2 x 1.5 x 1,76) = 5,28 J
5. Wstray = 1 % x 2000 x 1,76 = 35,2 J
6. Wmekanis = 14,58 x 1,76 = 25,67 J
sehingga energi yang hilang ( Wbraking) pada saat pengereman adalah :
Wbr = Wcu a + Wcu sh + Wcore + Wbrush + Wstray + Wmekanis Joule
= (10,25 + 240,29 + 86,47 + 5,28 + 35,2 + 25,67) J = 403,16 J
Dari kedua keadaan yaitu pada saat start dan pengereman, maka energi total yang hilang selama motor DC penguatan Shunt beroperasi sampai ¾ beban penuh adalah :
Wtot = Wst+ Wbr = 150,105J + 403,16 J = 553,265 J
BAB V
KESIMPULAN DAN SARAN
V.1 KESIMPULAN
1. Dari hasil analisa didapat bahwa energi yang hilang akibat panas yang dihasilkan dari percobaan adalah :
a) Pada saat start (Wstart) : 150,105J
b) Pada saat Pengereman (Wbraking) : 403,16 J
c) Energi Total yang hilang (Wtot) : 553,265 J
2. Dari hasil analisa data percobaan dapat disimpulkan bahwa energi yang hilang (panas) lebih banyak terjadi pada keadaan pengereman, ini diakibatkan jangka waktu operasi motor pada keadaan pengereman yang lebih lama serta perubahan beban yang semakin meningkat sehingga arus jangkar motor besar.
lxiv V.2 SARAN
Setelah dilakukan penelitian ini, maka saran yang bisa penulis sampaikan adalah : 1. Untuk pengembangan lebih lanjut, proses start dan pengereman hendaknya
menggunakan PLC sehingga tidak menggunakan rangkaian kontrol biasa atau manual.
DAFTAR PUSTAKA
1. Chapman, Stephen J, “Electrical Machinery Fundamental”, 4rd Edition, Mc Graw – Hill Company, Singapore, 2005.
2. Hughes, Austin, “Electric Motors and Drives”, Third Edition, Elsevier Ltd, England, 2006.
3. Mehta, V.K, dan Mehta, Rohit, “Principle Of Electrical Technology”, S.Chand & Company LTD, New Delhi, 2002.
4. Pillai, S.K, “A First Course On Elctrical Drives”, Wiley Eastern Limited, New Delhi, 1982
5. P.S. Bimbra, “Electrical Machinery”, Khana Publisher,1990.
6. Theraja, B.L, “A Text Book Of Electrical Technology”, Nurja Constuction & Development, New Delhi, 1989.
7. Wildi, Theodore, “Electrical Machines , Drives and Power System”, Prentice Hall Internasional, USA.2002.