AKUSTIK DAN PENERAPAN
HIDDEN MARKOV MODEL
ARMAN DJOHAN DIPONEGORO
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
Dengan ini saya menyatakan bahwa disertasi Penentuan Jenis Kawanan Ikan Berdasarkan Deteksi Fasa Pantulan Gelombang Akustik dan Penerapan Hidden Markov Model adalah karya saya sendiri dengan arahan pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dicantumkan dalam Daftar Pustaka di bagian akhir disertasi ini.
Bogor, Agustus 2007
Berdasarkan Deteksi Fasa Pantulan Gelombang Akustik dan Penerapan Hidden Markov Model. Dibimbing oleh Dr. Ir. INDRA JAYA M.Sc., Prof. Dr. Ir. BONAR P. PASARIBU M.Sc., Dr. Ir. TOTOK HESTIRIANTO M.Sc.
Penelitian ini ditujukan untuk membuktikan bahwa perubahan fase dari pendeteksian gelombang pantul dari gerakan kawanan ikan dan bentuk gelombang dari perubahan fase gelombang pantul tersebut tergantung dari jenis ikan yang diamati. Disamping itu dengan menggunakan teknik Hidden Markov Model (HMM) dapat dikenal jenis ikan yang diamati terhadap sejumlah jenis ikan lainnya. Penelitian ini dilakukan dalam tiga kegiatan yaitu simulasi perubahan fase, uji coba di lapangan dan simulasi adanya gangguan. Data perubahan fase yang diperoleh dari hasil simulasi perubahan fase dengan menggunakan ikan-ikanan dalam bentuk, ukuran, bahan permukaan dan formasi susunan ikan-ikanan dalam satu kelompok yang berbeda Simulasi dilakukan dengan cara menarik ikan-ikanan oleh motor listrik dengan kecepatan dan arah gerakan terhadap posisi transducer yang berbeda. Simulasi gangguan dilakukan untuk mengetahui besar pengaruh gangguan yang mungkin terjadi seperti pantulan dari obyek sekitarnya, suara motor, gelombang dari perangkat instrumen lainnya yang mempunyai frekuensi sama. Simulasi dilakukan dengan menggunakan beberapa rangkaian elektronik yang mewakili gelombang yang dipantulkan kawanan ikan, gelombang yang dipantulkan obyek sekitarnya dan suara motor. Untuk memperoleh kondisi yang nyata, dilakukan eksperimen di kolam ikan karantina Seaword dan di P. Genteng kecil Kep. Seribu dengan menggunakan keramba apung 4x4 m. Jenis ikan yang digunakan adalah sejumlah jenis ikan schooling , shoaling dan soliter. Dalam penelitian ini gelombang perubahan fase dari semua jenis ikan yang digunakan, dideteksi dengan perangkat akustik pendeteksi jenis ikan dengan menggunakan teknik phase shifted detection. Untuk menganalisis gelombang perubahan fase dari masing-masing jenis ikan atau ikan-ikanan, gelombang perubahan fase tersebut dikonversi ke bentuk frekuensi spektrum dengan teknik Fast Fourier Transform (FFT). Untuk membedakan jenis ikan atau ikan-ikanan yang dideteksi dihitung sudut antara garis kemiringan puncak spektrum dari percobaan-percobaan yang akan dibandingkan. Bila dua garis yang dibandingkan sejajar atau sudut antaranya 00 berarti gelombang perubahan fase yang dibandingkan bentuknya sama. Demikian sebaliknya bila membentuk sudut tertentu berarti bentuk gelombang perubahan fase yang dibandingkan tidak sama. Untuk melakukan proses pengenalan (recognition) digunakan metode Hidden Markov Model (HMM) salah satu dari teknik Kecerdasan Tiruan (artificial intellegent). Dari hasil proses pengenalan dengan teknik HMM diperoleh bahwa deteksi perubahan fasa untuk jenis ikan schooling dapat dikenal secara akurat atau jenis ikan yang teridentifikasi 100 % kecuali untuk jenis ikan shoaling dan soliter. Dari hasil simulasi gangguan gelombang pantul dari obyek sekitarnya, suara motor dan gelombang akustik dengan frekuensi yang sama tidak mempengaruhi hasil akhir proses pengenalan.
Species Based on The Phase of Acoustic Reflection Wave and The Application of Hidden Markov Model. Under direction of Dr. Ir. INDRA JAYA M.Sc., Prof. Dr. Ir. BONAR P. PASARIBU M.Sc., Dr. Ir. TOTOK HESTIRIANTO M.Sc.
The aim of this research was to show that detection of phase shifted of acoustic wave reflection due to the movement of the fish school could identify the kind of fish school or the moving targets from its properties. Using the Hidden Markov Model (HMM), the observed fish school could be recognized from other fish schools. The research were executed into three experiments, namely phase shifted detection simulation, interference simulation and in situ experiment. The phase shifted detection simulation was executed to prove that the waveform of phase shifted reflected acoustic wave of moving target could identify its characteristics based on its dimension, shape, speed and structure in a group that simulated by the number of imitation fishes. During experiment, the imitation fishes were pulled by electric motor with different speed and transducer positions toward the direction of imitation fish. The research also analyzed the influences of several kind of possible interferences generated during the phase detection of the acoustic wave reflection. The simulation were done by means of electronic circuitry that represented .the fishes wave reflection and by the interference waves such as the reflection wave, and the engine sound. In situ experiment were executed to observe the real condition of the phase shifted reflection wave for 3 (three) kind of fishes. The three kind of fishes, consist of schooling fish species, shoaling fish species and a solitary fishes species . The phase shifted data were collected from the experiments in the fishing pool in the Seaworld and in a 4x4 m sea cage in Genteng Island. In this research, the phase shifted wave of all kind of fishes and all kind of imitation fishes was be detected by the fish species detector using a phase shifted detection technique. To distinguish the kind of fishes or imitation fishes, the angle between two or more line slope of the spectrum envelope of each phase shifted waves were calculated. If the two lines were parallel or the angle between the lines were 0o, the spectrum or the phase shifted wave were coincide each other, or the two wave were the same and, if the two lines formed a certain angle, then such spectrums or phase shifted waves were different. Hidden Markov Model (HMM) technique was applied for recognition processing. Computational results, showed that the reflection wave of the schooling fishes could recognized the fish school accurately (the fish school were 100 % identified successfully), however such recognition processing was not valid for shoaling and solitary fishes. From the interference simulation results, the reflection wave due to the surrounding areas of the objects, engine noise, fish direction and transducer position were not affected the result of identification and recognition processes.
AKUSTIK DAN PENERAPAN
HIDDEN MARKOV MODEL
ARMAN DJOHAN DIPONEGORO C561020041
Disertasi
Sebagai salah satu syarat untuk memperoleh gelar Doktor pada
Departemen Pemanfaatan Sumberdaya Perikanan
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
Judul Disertasi
: Analisis Penentuan Kawanan Jenis Ikan Berdasarkan
Deteksi Fasa Pantulan Gelombang Akustik dan Penerapan
Hidden Markov Model
.
Nama Mahasiswa
: Arman Djohan Diponegoro
NRP.
: C561020041
Program Studi
: Teknologi Kelautan
Menyetujui.
Komisi Pembimbing
Dr. Ir. Indra Jaya, M.Sc
Ketua
Prof. Dr. Ir. Bonar P. Pasaribu, M.Sc
Dr. Ir. Totok Hestirianoto, M.Sc
Anggota Anggota
Mengetahui,
. Program Studi Teknologi Kelautan Dekan Sekolah Pascasarjana IPB
Ketua,
Prof. Dr. Ir. John Haluan M.Sc
Prof. Dr. Ir. Khairil A. Notodiputro, MS.
Penulis lahir di Jakarta pada tanggal 13 November 1948. Pada tahun 1976 lulus S1 di Fakultas Teknik UI Jurusan Elektro dan pada tahun 1991. lulus S2 di Program Studi Computer Engineering faculty of Engineering , National University of Singapore.
Sejak tahun 1985 sampai sekarang penulis bertugas di Departemen Elektro Fakultas Teknik Universitas Indonesia. Pada saat itu juga yaitu dari tahun 1997 sampai tahun 2005 bertugas di Pusat Sains dan Teknologi Universitas Indonesia (PPST-UI) sebagai Sekretaris PPST-UI. Sebelum bergabung di Universitas Indonesia, sejak 1978 sampai tahun 1984, penulis bertugas di berbagai perusahaan.
Di bidang penelitian penulis telah melakukan beberapa penelitian antara lain : penelitian mengenai Pengenalan jenis ikan soniferous dari suara yang dibangkitkan dengan menggunakan teknik Neural Network dan teknik Hidden Markov model (HMM)’, ’Pengenalan jenis kawanan ikan dari pendeteksian perubahan fase gelombang yang dipantulkan dengan menggunakan teknik Neural Network dan teknik Fuzzy Logic’, dan ’Pengenalan pola renang kawanan ikan schooling dari tampilan echogram dari split beam echo sounder EK60 dengan menggunakan teknik Fuzzy Logic, teknik Neural Network dan teknik HMM.
Paten yang diperoleh ”Identifikasi jenis ikan dengan mendeteksi perubahan fase gelombang yang dipantul oleh gerakan ikan yang diamati”, Pengenalan jenis ikan dengan menerapkan teknik Hidden Markov Model.
Publikasi yang berhubungan dengan penelitian ini antara lain
1. “The Fish Species Recognition in a Schooling Structure Using the Hidden Markov Model Based on The Phase Detection of Sonar Reflection Wave”, Proceeding The 2nd Indonesian Japan Scientific Symposium 2006, 280-286- 2. “The Analysis of The Interferences on the Phase Shifted Detection of Fish
Schooling Reflection Wave”, Proceeding The 2nd Indonesian Japan Scientific Symposium 2006, 287-291.
Penulis sangat bersyukur pada Allah SWT, yang karena kurnia-Nya telah
menjadikan penulis dapat menyelesaikan disertasi ini. Dalam penyusunan disertasi ini
penulis mencoba untuk mengatasi masalah yang dihadapi para nelayan di Indonesia
dalam melakukan penangkapan di laut. Mereka sangat kesulitan untuk mengetahui lokasi
fishing ground
dari jenis ikan tertentu terutama untuk memperoleh ikan dengan ukuran
tertentu atau ukuran dewasa dalam rangka menghindari penangkapan ikan-ikan yang
belum berproduksi . Hal ini dimaksudkan untuk memperoleh penangkapan yang ramah
lingkungan dalam menjaga kesinambungan kehidupan jenis ikan tertentu di perairan
Indonesia. Demikian pula untuk menghindari waktu yang terbuang dan usaha yang sia-sia
akibat melakukan penangkapan dengan cara mencoba-coba atau tanpa perhitungan, perlu
dibuat perangkat yang dapat mendeteksi jenis ikan yang diinginkan. Berdasarkan hal
tersebut diatas penulis melakukan penelitian untuk memperoleh alat yang mampu
mendeteksi jenis ikan tertentu.
Terima kasih kepada Dr Ir Indra Jaya M.Sc. Prof Dr Ir Bonar P. Pasaribu dan Dr
Ir. Hestirianto M.Sc yang telah meluangkan waktu dalam membimbing serta melakukan
penelitian dan penyusunan disertasi ini. Demikian pula penulis mengucapkan terima
kasih kepada Pusat Penelitian Sains dan Teknologi Universitas Indonesia yang telah
membiayai sebagian besar biaya penelitian disamping juga dukungan moril yang penulis
peroleh selama penulis menempuh pendidikan S3 di Institut Pertanian Bogor.
Semoga disertasi ini dapat dipergunakan sebagai dasar penelitian dalam
pengembangan perangkat pendeteksi atau pengenalan jenis ikan di masa mendatang yang
lebih sempurna.
Bogor,
Agustus
2007
DAFTAR ISI
Halaman
DAFTAR ISI ………..……..……… i
DAFTAR TABEL ………...…………..……….. vii
DAFTAR GAMBAR ………..………...…. ix
DAFTAR LAMPIRAN... xvi
DAFTAR ISTILAH ... ………....… xvii
1 PENDAHULUAN ………... 1
1.1 Latar Belakang ……….... 1
1.2 Tujuan dan Manfaat ………... 2
1.3 Lingkup Kegiatan ………...…... 3
1.4 Batasan ………... 3
1.5 Perumusan Hipotesis ... 4
1.5.1 Perubahan fase akibat gerakan target pantulan dengan bentuk random ... 4
1.5.2 Gerakan schooling berbagai jenis ikan ... 7
1.5.3 Pengaruh gangguan... 10
1.5.4 Posisi transducer terhadap arah gerakan kawanan ikan... 13
1.5.5 Pengaruh pantulan pada permukaan perairan ... 14
1.5.6 Pengaruh azas Doppler ... 15
1.5.7 Posisi transducer terhadap gerakan kawanan ikan ke arah vertikal ... 15
1.6 Sistimatika Penulisan ... 16
2 TINJAUAN PUSTAKA ... 17
2.1 Gerakan Kawanan Ikan ... 17
2.2 Gerakan Ikan Secara Individu ... 22
2.3 Pengolahan Sinyal ... 23
2.4 Deteksi Perubahan Fase ... 26
2.5 Persamaan Akustik ... 27
2.7 Hidden Markov Model ... 36
3 METODOLOGI ... 41
3.1 Deteksi Perubahan Fase... 41
3.1.1 Frekuensi yang digunakan ... 42
3.1.2 Proses penerimaan gelombnag perubahan fase ... 43
3.2 Kegiatan Penelitian yang Dilakukan... 43
3.2.1 Simulasi pendeteksian perubahan fase ... 44
3.2.2 Simulasi pengaruh gangguan ... 46
3.2.3 Uji coba di kolam ... 49
3.2.4 Uji coba di laut ... 50
3.3 Metode untuk Memperlihatkan Perbedaan Karakteristik Sekelompok Obyek Bergerak atau Gerakan Jenis Kawanan Ikan ... 51
3.4 Proses Pengenalan dengan Teknik HMM... 53
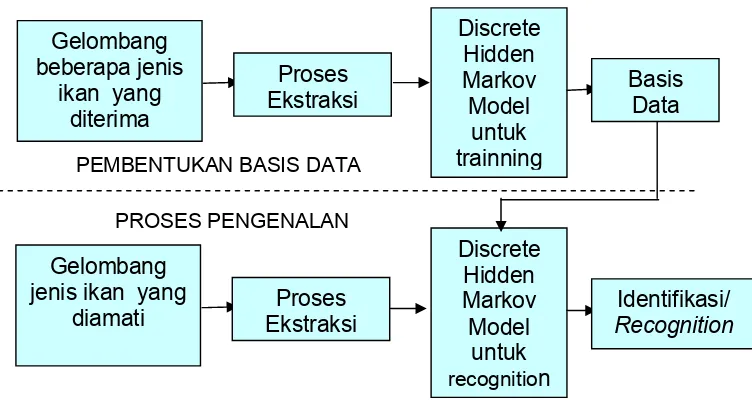
3.4.1 Pembentukan basis data ... 54
3.4.2 Proses pengenalan ... 56
3.4.3 Proses ekstraksi ...……….. 57
3.4.4 Pembentukan state dari Markov chain ……….. 58
3.4.5 Log of probabilty ... 59
4 HASIL RANCANG BANGUN SISTIM DETEKSI KAWANAN IKAN .. 60
4.1 Rancang Bangun Perangkat Pendeteksi Jenis Ikan ………... 60
4.1.1 Diagram blok... 60
4.1.2 Frekuensi yang digunakan... 60
4.1.3 Daya pancar yang diperlukan... 61
4.1.4 Transducer... 61
4.1.5 Rangkaian osilator... 62
4.1.6 Rangkaian penguat daya... 64
4.1.7 Rangkaian penerima... 67
4.1.9 Phase shifted detector... 70
4.1.10 Uji coba rangkaian keseluruhan……… 72
4.2 Rancang Bangun Perangkat Lunak HMM ………... 74
4.2.1 Algoritma membangun basis data (data base) sebagai pembanding ………. 74
4.2.2 Algoritma proses pengenalan ... 76
4.2.3 MATLAB TOOLBOX command ……… 77
4.3 Rancang Bangun Perangkat Simulasi Gangguan ………... 81
4.3.1 Rangkaian simulasi pembangkit gelombang perubahan fase akibat pantulan gerakan kawanan Ikan... 82
4.3.2 Rangkaian penggeser fase... 84
4.3.3 Rangkaian penggabung ... 87
4.3.4 Foto perangkat simulasi pengaruh gangguan... 88
4.4 Rancang Bangun Perangkat Simulasi Perubahan Fase ... 89
4.4.1 Unit penggerak………..… 89
4.4.2 Unit pembawa ikan-ikanan... 91
4.4.3 Unit pengendali... 94
4.4.4 Foto konstruksi simulasi... 96
5 SIMULASI DAN UJI COBA SISTIM DETEKSI………... 98
5.1 Simulasi Perubahan Fase …...………... 98
5.1.1 Konfigurasi uji coba... 98
5.1.2 Uji coba simulasi gerakan unit pembawa ikan-ikanan dalam keadaan kosong... 100
5.1.3 Uji coba simulasi ikan-ikanan berukuran 20 x 25 cm dari tripleks... 102
5.1.4 Uji coba simulasi ikan-ikanan dengan permukaan karet... 104
5.1.5 Uji coba simulasi ikan-ikanan berukuran 30 cm ... 106
5.1.7 Uji coba simulasi ikan-ikanan berukuran 10 cm ... 109
5.1.8 Uji coba simulasi ikan-ikanan 10 cm dengan permukaan cembung... 111
5.1.9 Uji coba simulasi ikan-ikanan berukuran 30 cm dengan kecepatan lambat 1 m/detik ... 112
5.1.10 Uji coba simulasi dengan posisi transducer 300 dan 1500 dari arah gerakan ikan-ikanan... 113
5.2 Simulasi Pengaruh Gangguan ... 116
5.2.1 Uji coba simulasi pengaruh pantulan gelombang pembawa... 116
5.2.2 Uji coba simulasi pengaruh adanya gangguan dari pantulan gelombang pantul gerakan kawanan ikan itu sendiri... 119
5.2.3 Uji coba simulasi pengaruh gangguan dari suara motor... 121
5.2.4 Uji coba simulasi pengaruh gelombang yang frekuensi nya sama dengan frekuensi pembawa (200 kHz)... 123
5.3 Uji Coba di Kolam... 125
5.3.1 Konfigurasi uji coba... 125
5.3.2 PelaksamaanUji coba………... 126
5.3.3 Hasil uji coba... 129
5.4 Uji Coba di Laut... 134
5.4.1 Konfigurasi……… 134
5.4.2 Pelaksanaan uji coba……… 136
5.4.3 Hasil uji coba……… 136
5.5 Proses Pengenalan………. 140
5.5.1 Pelaksanaan uji coba………. 140
5.5.2 Rangkuman hasil uji coba... 154
6 ANALISIS DAN PEMBAHASAN... 155
6.1 Analisis Simulasi Perubahan Fase... 155
6.1.2 Perbandingan spektrum ikan-ikanan berukuran 30 cm ... 157
6.1.3 Perbandingan spektrum ikan-ikanan berukuran 10 cm ... 158
6.1.4 Perbandingan spektrum ikan-ikanan dengan permukaan tripleks dan karet... 159
6.1.5 Perbandingan spektrum ikan-ikanan dengan bentuk permukaan rata dan permukaan cembung... 160
6.1.6 Perbandingan spektrum ikan-ikanan untuk 3 (tiga) lapis frame... 160
6.1.7 Perbandingan spektrum ikan-ikanan untuk 2 (dua) Kecepatan... 161
6.1.8 Perbandingan spektrum 3 (susun) ikan-ikanan dalam satu frame... 162
6.1.9 Perbandingan spektrum ikan-ikanan untuk 3 (tiga) posisi transducer... 163
6.1.10 Perbandingan spektrum untuk 3 (tiga) jenis ukuran ikan-ikanan... 163
6.2 Analisis Simulasi Pengaruh Gangguan... 164
6.2.1 Pengaruh gangguan dari gelombang lainnya dengan frekuensi berbeda... 164
6.2.2 Pengaruh gangguan dari pantulan gelombang yang dipancarkan... 166
6.2.3 Pengaruh gangguan dari pantulan gelombang gerakan schooling ikan itu sendiri... 168
6.2.4 Pengaruh gangguan dari suara mesin dan noise lainnya... 169
6.2.5 Pengaruh gangguan dari peralatan akustik lainnya dengan frekuensi dan fase sama ... 169
6.3 Analisis Hasil Uji Coba di Lapangan... 170
6.3.1 Analisis hasil uji coba bandeng... 170
6.3.2 Analisis hasil uji coba 10 ekor bandeng... 172
6.3.3 Analisis hasil uji coba hiubambu……….. 174
6.3.4 Analisis hasil uji coba kerong……… 176
6.3.6 Analisis hasil uji coba kakap... 179
6.3.7 Analisis hasil uji coba untuk berbagai posisi transducer... 180
6.3.8 Analisis hasil uji coba untuk adanya gangguan... 182
6.3.9 Analisis perbandingan spektrum 4 jenis ikan... 184
6.4 Analisis Proses Pengenalan ... 185
6.4.1 Pengaruh perubahan ukuran codebook ... 185
6.4.2 Pengaruh perubahan ukuran repetisi ……… 186
6.4.3 Pengaruh perubahan ukuran durasi ………..…… 188
6.4.4 Perbandingan proses pengenalan untuk berbagai Jenis kawanan ikan………... 189
7 KESIMPULAN DAN SARAN... 190
DAFTAR PUSTAKA... 191
halaman
1
Jarak pancar untuk berbagai frekuensi dan daya pancar ………...…..
612
Spesifikasi Transducer yang digunakan……….….
62
3
Spesifikasi jenis ikan yang digunakan uji coba di kolam Seaworld …….…... 1264
Spesifikasi jenis ikan yang digunakan uji coba di laut ... 136
5
Kumpulan hasil uji coba untuk ukuran
codebook
32,
durasi 0,2 detik... 142
6
Kumpulan hasil uji coba untuk ukuran
codebook
64,
durasi 0,2 detik...
144
7
Kumpulan hasil uji coba untuk ukuran
codebook
128,
durasi 0,2 detik... 146
8
Kumpulan hasil uji coba untuk ukuran
codebook
32,
durasi 1 detik... 148
9
Kumpulan hasil uji coba untuk ukuran
codebook
64,
durasi 1 detik………... 150
10
Kumpulan hasil uji coba untuk ukuran
codebook
128,
durasi 1 detik………... 152
11
Rangkuman hasil uji coba untuk bandeng... 154
12
Rangkuman hasil uji coba untuk hiubambu... 154
13
Rangkuman hasil uji coba untuk kerong... 154
14
Rangkuman hasil uji coba untuk bendera... 154
15
Rangkuman hasil uji coba untuk kakap merah... 154
16 Besar amplitude spektrum dari 5 (lima) percobaan ikan-ikanan
berukuran 20 x 25 cm dalam dB... 156
17 Amplitude spektrum gerakan ikan-ikanan berukuran 20 x 25 cm
dalam skala linear yang dinormalisir... 156
skala linear yang dinormalisir... 174
20
Besar spektrum frekuensi hiubambu dalam skala linear
yang
dinormalisir...
175
21
Besar spektrum kerong dalam skala linear yang dinormalisir... 176
22
Besar spektrum gerakan bendera dalam skala linear
yang
dinormalisir...
178
23
Besar spektrum gerakan kakap dalam skala linear
yang
dinormalisir...
179
24
Besar spektrum bandeng dengan tiga posisi transducer
dalam skala linear yang dinormalisir... 181
25
Besar spektrum dengan adanya gangguan dalam skala linear
yang
dinormalisir...
183 26Nilai
LoP
dari file bendera19a untuk ukuran codebook 64 dan 128
dengan ukuran repetisi 5……….. 186
27 Nilai
LoP
dari file bendera16a untuk ukuran repetisi 10 dan 15
DAFTAR GAMBAR
halaman
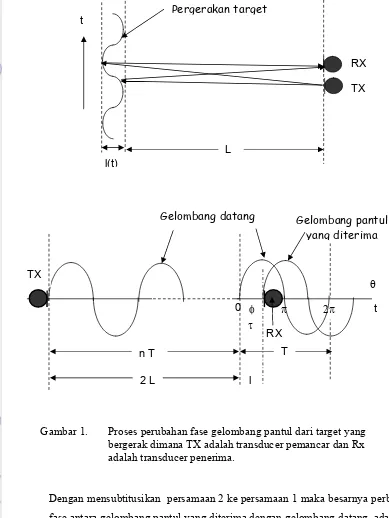
1 Proses perubahan fase gelombang pantul dari target yang bergerak
Dimana TX adalah transducer pemancar dan RX adalah
transducer penerima ... 5
2 Ilustrasi simpangan gerakan ikan... 7
3 Formasi schooling horisontal sebagai fungsi fasa, φ(t)... 8
4 Perubahan fase akibat formasi vertikal schooling ikan... 9
5 Gangguan gelombang pantul dari gelombang yang dipantulkan kawanan ikan... 12
6 Bentuk gelombang yang dihasilkan dari gabungan beberapa gelombang dengan frekuensi yang sama tetapi berbeda fase... 12
7 Arah pancar transducer terhadap arah gerakan kawanan ikan... 13
8 Posisi tranducer membentuk sudut α secara vertikal terhadap gerakan ikan ... 15
9 Kepadatan schooling yang berhubungan dengan panjang ikan untuk jenis-jenis saithe, herring, dan sprat ... 18
10 Kepadatan schooling herring... 19
11 Perubahan bentuk schooling harengula clupeola dari pandangan horisontal selama pengamatan satu jam... 20
12 Posisi antar individu untuk tiga jenis ikan, seithe, herring dan cod dilihat dari pandangan (a) atas (horisontal) dan (b) vertikal ... 21
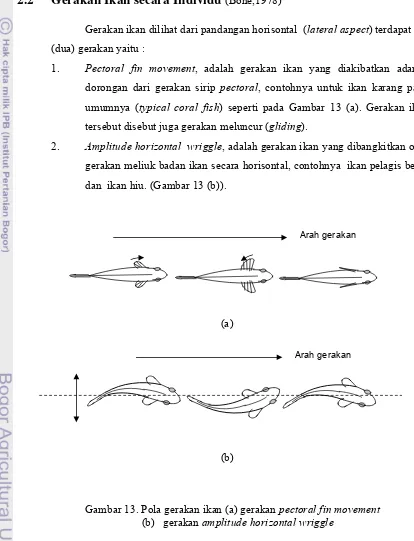
13 Pola gerakan ikan (a) gerakan pectoral fin movement (b) gerakan amplitude horizontal wriggle ….………. 22
14 Bentuk gelombang sinusoida... 23
15 Gelombang pulsa segiempat periodik... 24
16 Spektrum frekuensi gelombang segiempat periodik... 26
17 Diagram blok phase modulator dan phase shifted detector…….……… 26
18 Diagram pembuatan basis data referensi dan proses identifikasi... 29
19 MFCC processor... 30
20 Mel-spaced filterbank………...….. 32
22 Diagram konsep pembentukan codebook dengan vector quantization. sinyal satu dan lainnya dapat
dibedakan berdasarkan lokasi dari centroidnya... 35
23 Diagram alir dari algoritma LBG... 36
24 State Diagram dari HMM atau HMM chain dengan 4 state... 38
25 Diagram blok perangkat pendeteksi fase gerakan kawanan jenis ikan. TX adalah transducer pemancar dan RX adalah transducer penerima... 41
26 Hubungan panjang ikan dengan frekuensi ... 43
27 Konfigurasi pelaksanaan simulasi pendeteksian perubahan fase dari gelombang pantul gerakan kawanan ikan-ikanan (a) konstruksi kolam percobaan (b) struktur unit ikan-ikanan ... 45
28 Diagram blok simulasi pengaruh gangguan... 48
29 Lintasan gelombang pantul dan gelombang langsung... 49
30 Uji coba di kolam... 50
31 Uji coba dengan keramba di laut... 51
32 Metode untuk memperoleh kurva kemiringan puncak (envelope) spektrum frekuensi... 52
33 Diagram alir proses pembentukan basis data…... 54
34 Diagram alir proses pengenalan... 57
35 Penggalan gelombang dari gelombang satu jenis kawanan ikan ... 58
36 Diagram blok perangkat pendeteksi jenis kawanan ikan... 60
37 Foto transducer ... 62
38 Rangkaian osilator dengan rangkaian penguat... 63
39 Unjuk kerja rangkaian osilator... 64
40 Rangkaian penguat daya... 65
41 Unjuk kerja rangkaian penguat daya untuk (a) frekuensi 50 kHz (b) frekuensi 200 kHz ... 66
42 Rangkaian penerima (reveiver) ... 68
43 Unjuk kerja rangkaian penerima... 68
44 Rangkaian low pass filter……….……….. 69
45 Unjuk kerja rangkaian low pass filter……… 69
detector dengan menggunakan balance modulator……… 71
48 Unjuk kerja rangkaian phase shifted detector………..…. 72
49. Diagram blok uji coba sistim perangkat keseluruhan………..…... 73
50 Foto dari peralatan secara keseluruhan... 73
51 Foto rangkaian dari masing-masing unit………..….. 74
52 Codebook dari basis data... 78
53 Tampilan dimensi 2 dari pembelajaran codebook ... 79
54 Rangkaian pembangkit perubahan fase... 82
55 Diagram blok uji coba simulasi pembangkit perubahan fase... 82
56 Unjuk kerja rangkaian pembangkit perubahan fase (a) amplitude pada skala 10 mV (b) amplitude pada skala 5 mV (c) gelombang segiempat dengan amplitude pada skala 10 mV ... 83
57 Rangkaian pengeser fase... 85
58 Diagram blok uji coba rangkaian penggeser fase... 85
59 Unjuk kerja rangkaian penggeser fase (a) penggeseran fase sebesar 1800 dengan tegangan DC maksimum (3 V) (b) penggeseran fase sebesar 900 untuk tegangan DC 1 V (c) penggeseran fase dengan amplitude gelombnag pantul Lebih kecil dari gelombnag datang karena jarak ... 86
60 Rangkaian penggabung (adder/ mixer)... 87
61 Foto perangkat simulasi pengaruh gangguan... 88
62 Konstruksi perangkat simulasi perubahan fase... 90
63 Konstruksi unit penggerak... 91
64 Konstruksi unit pembawa ikan-ikanan ... 92
65 Bentuk ikan–ikanan berukuran 20 x 25 cm (a) dari bahan tripleks (b) dari bahan karet ... 93
66 Bentuk ikan-ikanan berukuran 30 cm... 94
67 Bentuk ikan-ikanan berukuran 10 cm... 94
68 Konstruksi stop otomatis... 95
69 Tampilan tombol pengendali jarak jauh... 95
70 Rangkaian pengatur gerakan maju mundur... 96
71 Rangkaian pengatur kecepatan ... 96
(b) unit ikan-ikanan (c) unit pengendali (d) bagian penyanggah
(e) bagian motor listrik ... ... 97
73 Konfigurasi Uji coba simulasi perubahan fase... 99
74 Tampak muka tampilan pengendali... 99
75 Foto uji coba simulasi unit pembawa dalam keadaan kosong... 101
76 Hasil uji coba simulasi gerakan unit pembawa dalam keadaan kosong (a) bentuk gelombang (b) spektrum frekuensi ... 102
77 Uji coba simulasi ikan-ikanan berukuran 20 x 25 cm... 103
78 Bentuk gelombang perubahan fase gerakan ikan-ikanan berukuran 20 x 25 cm dari tripleks (a) masih mengandung noise (b) tanpa noise ... 104
79 Uji coba simulasi ikan-ikanan berukuran 20 x 25 cm dari karet... 105
80 Tampilan gelombang perubahan fase dari gelombang pantul gerakan ikan-ikanan berukuran 20 x 25 cm dengan permukaan dari karet setelah dibebaskan dari noise gerakan unit pembawa ikan-ikanan... 105
81 Uji coba simulasi ikan-ikanan berukuran 30 cm (a) susunan belah ketupat (b) dengan susunan tidak teratur. ... 106
82 Tampilan gelombang perubahan fase akibat pantulan gerakan ikan-ikanan berukuran 30 cm tanpa noise unit pembawa ikan-ikanan (a) susunan belah ketupat (b) susunan tidak teratur... 107
83 Uji coba simulasi ikan-ikanan berukuran 30 cm 2 (dua) lapis... 108
84 Tampilan bentuk gelombang perubahan fase akibat pantulan 2 lapis kawanan ikan-ikanan berukuran 30 cm tanpa noise... 109
85 Uji coba simulasi ikan-ikanan berukuran 10 cm dengan permukaan rata dari tripleks... 110
86 Bentuk gelombang perubahan fase gerakan ikan-ikanan berukuran 10 cm dengan permukaan rata dari tripleks tanpa noise... 110
87 Uji coba simulasi ikan-ikanan berukuran 10 cm dari kayu cembung ... 111
gerakan ikan-ikanan berukuran 30 cm dengan kecepatan 1 m/det... 113
90 (a) Uji coba simulasi dengan posisi transducer 300 dari arah gerakan
ikan-ikanan dan (b) Uji coba simulasi dengan posisi tarnsducer 1500... 114
91 Tampilan bentuk gelombang perubahan fase akibat pantulan
gerakan ikan-ikanan berukuran 30 cm (a) dengan posisi
transducer 300 dan (b) 1500 dari gerakan ikan-ikanan………..…. 115
92 Konfigurasi uji coba simulasi gangguan pantulan gelombang-
gelombang yang dipancarkan... 117
93 Hasil uji coba gangguan dari pantulan gelombang yang dipancarkan
(a) input ke mixer (b) gelombang yang keluar rangkaian
phase detector setelah melewati rangkaian LPF .. ………… .... 118 94 Konfigurasi rangkaian simulasi pantulan gelombang
pantul obyek bergerakseperti gerakan ikan... 119
95 Hasil uji coba gangguan dari pantulan gelombang pantul
gerakan kawanan ikan itu sendiri (a) input ke mixer
(b) perbandingan gelombang mewakili gerakan ikan dan output
dari phase detector setelah LPF ... 120 96 Konfigurasi uji coba simulasi pengaruh gangguan suara motor... 121
97 Hasil uji coba gangguan suara motor (a) gelombang yang masuk
ke rangkaian mixer (b) perbandingan keluaran LPF dengan
gelombang yang mewakili gerakan kawanan ikan ... 123
98 Konfigurasi uji coba simulasi pengaruh gangguan pada
frekuensi yang sama... 125
99 Hasil uji coba gangguan dengan frekuensi yang sama... 124
100 Konfigurasi proses uji coba sinyal yang diterima dari sinyal
pantulan yang dipancarkan transducer pemancar... 125
101 Posisi transducer tegak lurus pada jarak 4 m dari gerakan
kawanan ikan untuk semua jenis ikan yang diuji ... 127
102 Posisi transducer untuk beberapa posisi transducer
(a) posisi 300 (b) posisi 1500 (c) jarak 1 m... 128
103 Hasil uji coba bandeng (a) percobaan pertama
(b) percobaan kedua (c) percobaan ketiga………..….…. 129
pada posisi 30 (a) percobaan pertama (b) percobaan kedua
(c) percobaan ketiga ……….……….……….…… 130
105 Hasil uji coba gerakan kawanan bandeng dengan transducer pada
posisi 150o (a) percobaan pertama (b) percobaan kedua
(c) percobaan ketiga. ... ... 131
106 Hasil uji coba gerakan kawanan bandeng dengan transducer
pada posisi 90o dengan jarak 1 m (a) percobaan pertama
(b) percobaan kedua (c) percobaan ketiga ...…….. 132
107 Hasil uji coba gerakan kawanan hiubambu dengan
transducer pada posisi 90o dengan jarak 4 m (a) percobaan pertama
(b) percobaan kedua (c) percobaan ketiga ………..……… 133
108 Konfigurasi uji coba di laut... 134
109 Konstruksi keramba jaring untuk uji coba... 135
110 Hasil uji coba gerakan kawanan kerong (a) percobaan
pertama (b) percobaan kedua (c) percobaan ketiga... 137
111 Hasil uji coba gerakan kawanan bendera (a) percobaan
pertama (b) percobaan kedua (c) percobaan ketiga... 138
112 Bentuk gelombang kakap merah (a) percobaan pertama untuk
satu ekor (b) percobaan kedua satu ekor (c) percobaan kedua
untuk 2 (dua) ekor (d) percobaan ketiga untuk 3 (tiga) ekor... 139
113 Konfigurasi proses pengenalan ... 141
114 Spektrum frekuensi gelombang perubahan fase
gerakan ikan-ikanan berukuran 20 x 25 cm dari percobaan 1 ... 155
115 Spektrum gerakan ikan-ikanan berukuran 20 x 25 cm ... 157
116 Spektrum ikan-ikanan berukuran 30 cm... 158
117 Spektrum gerakan ikan-ikanan berukuran 10 cm... 158
118 Spektrum gerakan ikan-ikanan dengan permukaan
dari tripleks dan karet. ... 159
119 Spektrum gerakan ikan-ikanan dengan permukaan rata
dan cembung... 160
120 Perbedaan spektrum gerakan ikan-ikanan 1 (satu) lapis dengan
2 (dua) lapis jarak 5 cm dan 2 (dua) lapis dengan jarak 10 cm... 161
2 (dua) kecepatan...,... 162
122 Spektrum 3 (susun) ikan-ikanan dalam satu frame... 162
123 Spektrum ikan-ikanan untuk 3 (tiga) posisi transducer... 163
124 Perbandingan spektrum untuk 3 (tiga) jenis ukuran ikan-ikanan... 164
125 Pengertian persamaan Cos (2ωct + φ(t)) dengan Cos (2ωct + θ)... 167
126 Perbandingan envelope spektrum gerakan kawanan bandeng... 171 127 Foto bandeng bergerak balik arah... 173
128. Spektrum untuk 10 ekor bandeng... 174
129 Spektrum perubahan fase gelombang pantul gerakan kawanan
hiubambu... 175
130 Spektrum perubahan fase dari gelombang pantul gerakan kawanan
Kerong... 177
131 Spektrum perubahan fase dari gelombang pantul gerakan
kawanan bendera... 178
132 Spektrum perubahan fase dari gelombang pantul gerakan
kawanan kakap ... 180
133 Spektrum perubahan fase dari gelombang pantul gerakan kawanan
ikan untuk beberapa posisi transducer... 181
134 Diagram polar atau beamwidth transducer yang digunakan ... 182 135 Spektrum 10 ekor bandeng dengan adanya gangguan ... 183
136 Spektrum perubahan fase dari gelombang pantul gerakan
DAFTAR LAMPIRAN
halaman
1
Foto uji coba deteksi perubahan fase di Lab. Akustik Fakultas
1
Akustik
: ilmu tentang suara
2
Aliasing
: tumpang tindih antara beberapa gelombang
3
Amplifier
: rangkaian penguat tegangan atau daya suatu gelombang.
4
Balance
Modulator
: suatu chip elektronik (
Integrated circuit
) yang dapat
digunakan sebagai rangkaian pendeteksi perubahan fase.
5
Centroid
: sebuah titik yang mewakili beberapa titik-titik sample (
codeword)
dan
satu
cluster
6
Cluster
: suatu ruang dua dimensi dari suatu bidang yang bentuknya tergantung
dari teknik yang digunakan
7
Codebook
: kumpulan sejumlah
codeword
dari beberapa
codeword
8
Codeword
: titik-titik
sample
dari besaran komponen-komponen spektrum
frekuensi dari suatu gelombang yang diperoleh dari hasil transformasi Fourier.
9
Cool Edit Pro
: Perangkat lunak aplikasi untuk memproses sinyal
10
Distorsi
: cacat gelombang akibat kondisi alat atau rangkaian.
11
Dorsal aspect
: pandangan arah vertikal dari atas
12
Echo Sounder
: Perangkat untuk mendeteksi jarak atau kedalaman dengan
menggunakan teknik pantulan gelombang akustik
13
Ekstraksi
: Proses pemenggalan gelombang sampai ke proses pembentukan
codebook
14
Function generator
: Instrumen pembangkit gelombang dengan frekuensi RF
15
Far field
: daerah jangkauan diluar pengaruh
side loop
dari transducer
16
Feature Extraction
: mengubah suatu bentuk gelombang ke bentuk gelombang
dengan waktu durasi tertentu agar dapat diproses ke besaran
codeword
17
FFT
:
Fast Fourier Transform
, teknik atau cara untuk mengubah suatu gelombang
dari domain waktu ke domain frekuensi.
18
Frame blocking
: pembatasan panjang gelombang dalam satu
frame
halnya pada perangkat
Fish Finder
dimana gelombang yang dipancarkan dalam
bentuk penggalan-penggalan dengan waktu durasi tertentu
21
HMM
: Hidden Markov Model
22
HMM Recognition
: proses pengenalan dengan menggunakan metode HMM.
23
Interference
: gelombang gangguan yang mungkin terjadi dalam suatu sistim
24
Lateral aspect
: pandangan kearah samping badan ikan.
25
LBG :
Linde, Buzo, and Gray salah satu teknik VQ
26
LoP
:
Log of probability
, besarnya kemungkinan munculnya suatu pengamatan
dari suatu sederetan munculnya suatu kejadian ke kejadian tertentu (
probability
of transition
) dengan memperhitungkan kemungkinan munculnya kejadian yang
mengikuti sebelumnya.
27
LPC
:
Linear Predictive Coding
, salah satu teknik untuk mengompres gelombang
suara pembicaraan.
28
LPF
: Low Pass Filter
, penampis frekuensi rendah
29
Main loop :
bagian utama
pola radiasi suatu transducer
30
MFCC
:Mel Frequency Cepstrum Coefficient
,31
Near field
: jarak pancar yang masih dipengaruhi
side loop
dari suatu antena atau
transducer
32
Noise
: derau atau galat, adalah gangguan yang muncul dari dalam alat itu sendiri
atau dari luar dalam bentuk gelombang dengan spektrum yang sangat lebar.
33
Osilator
: rangkaian pembangkit gelombang dengan frekuensi yang diinginkan
34
Osiloskop
: alat ukur untuk melihat bentuk suatu gelombang.
35
Phase delay :
perbedaan fase
36
Phase modulator :
rangkaian yang menumpangkan gelombang sinyal dalam hal
ini gelombang perubahan fase ke gelombang pembawa (akustik) dengan cara
menggeser fasenya.
37
Phase shifted :
perubahan fase
38
PSK
:
Phase Shifted Keying
, teknik perubahan fase
(kejadian)
41
Probability of transition
: besar kemungkinan munculnya suatu kejadian ke
kejadian tertentu.
42
Schooling
: suatu gerakan kawanan ikan dengan arah yang sama dimana setiap
individu bergerak seirama
43
Shoaling
: suatu gerakan kawanan ikan dengan arah yang dapat berbeda-beda
dan setiap individu bergerak
tidak
seirama.
44
Side loop
: bagian tepi dari pola radiasi suatu transducer
45
Signal generator
: perangkat pembangkit gelombang
46
State
: kejadian dalam suatu rantai HMM, dapat berupa gelombang-gelombang
pendek dari suatu deretan gelombang yang panjang, atau huruf-huruf dalam
suatu teks dan sebagainya.
47
Target Strength
: faktor pantul dari badan ikan
48
Transducer
: perangkat yang digunakan untuk mengubah gelombang dalam
besaran listrik ke besaran akustik dan sebaliknya.
49
Trainning
: proses pembelajaran
50
VQ
:
Vector Quantization
, mengumpulkan sejumlah titik-titik sample (
codeword)
dalam suatu
cluste
r ke satu titik
centroid
.
51
VQ distortion
: jarak antara suatu titik
sample
dengan
centroid
52
Waveform
: bentuk gelombang dalam waktu (time domain).
53
Wavelab :
suatu perangkat lunak aplikasi
yang digunakan untuk mengolah suatu
bentuk gelombang.
1 PENDAHULUAN
1.1
Latar
Belakang
Saat ini teknologi hidroakustik atau perangkat lunak pengolah sinyal
akustik masih sulit untuk dapat mengetahui jenis dan panjang ikan secara
langsung dan akurat. Selama ini perangkat yang berhasil digunakan adalah
perangkat untuk mengetahui kepadatan ikan pada lokasi tertentu di perairan laut,
estimasi stock kelimpahan ikan atau untuk mengetahui migrasi ikan tertentu (Xie,
2000), kecepatan dan arah renang (Jaya dan Pasaribu. 2000). Umumnya alat yang
digunakan adalah perangkat fish finder dengan teknologi tertentu seperti split beam fish finder atau fish finder yang menggunakan metode integration method.
Meskipun demikian beberapa pakar mencoba menggunakan perangkat fish finder untuk menentukan jenis ikan tertentu dilihat dari besarnya Target Strenght
(TS) atau faktor pantul dari tubuh ikan yang diterima, misalnya Furusawa dan
kawan-kawan (Furusawa et.al., 1992) mencoba mengidentifikasi jenis ikan dengan menerapkan metode two-step echo integration method. Cara tersebut tidak berhasil karena ada sejumlah ikan mempunyai TS yang sama, misalnya capelin
dengan panjang 16 cm mempunyai TS yang sama dengan makerel yang
berukuran 40 cm. Lu dan Lee (Lu and Lee, 1994) mencoba untuk
mengidentifikasi jenis ikan dengan menggunakan echo-signal image processing system, yaitu dengan menerapkan metode pemerosesan citra yang hasilnya mempunyai tingkat ketelitian sebesar 90 %. Tetapi ikan yang dibandingkan adalah
ikan-ikan yang ukurannya jauh berbeda seperti scad dengan panjang 50 cm,
anchovy dengan panjang 15 cm, Skipjack dengan panjang 100 m dan mackerel
dengan panjang 35 cm.
Dari hasil penelitian yang pernah dilakukan oleh Pitcher and Partridge,
(1979) dilihat dari struktur gerakannya, ikan berenang membentuk pola tertentu
tergantung dari jenis ikan. Umumnya semua jenis ikan berenang dengan
per unit volume) tergantung dari jenis dan panjang ikan. Makin panjang makin
kecil kepadatannya. Bentuk dan dimensi dari schooling tergantung dari waktu (Squire, 1978), jenis ikan (Misund et al, 1995; Hara, 1985), kedalaman (Misund, 1993b) dan penghindaran terhadap serangan predator (Freon et al, 1992). Demikian pula dimensi horisontal school lebih besar dari dimensi school vertical
(Oshihimo, 1996). Bentuk schooling herring tergantung dari kedalaman (Misund, 1993b). 70 % dari schooling hering berbentuk circular atau oval, 20 % berbentuk parabola atau rod, dan 10 % berbentuk amorphous. (Misund et al, 1995).
Dengan memperhatikan kejadian pada suatu sistim komunikasi radio
bergerak yang menggunakan metode modulasi fase, dimana akibat adanya
pengaruh pantulan oleh bangunan maupun pohon-pohonan disekitarnya, akan
terjadi fluktuasi yaitu perubahan fase naik turunnya daya sinyal informasi yang
tidak teratur sesuai dengan profil permukaan pantulan serta kecepatan gerakan
dalam hal ini kecepatan kendaraan. Makin cepat gerakannya makin makin cepat
fluktuasi yang terjadi.
Berdasarkan kejadian di atas dan dengan mengasumsikan bahwa struktur
kawanan ikan tetap untuk satu jenis ikan tertentu, maka bila suatu gelombang
merambat pada suatu media tertentu (air atau udara) dipantulkan oleh gerakan
renang kawanan jenis ikan tertentu, maka gelombang yang dipantulkan tersebut
akan mengalami perubahan fase pada setiap satuan waktu sesuai dengan bentuk/
struktur permukaan dan kecepatan gerakan kawanan ikan yang dipantulkan
tersebut.
Jadi dengan mendeteksi fase gelombang akustik yang dipantulkan oleh
gerakan kawanan suatu jenis ikan tertentu maka dari gelombang perubahan fase
yang dideteksi tersebut akan dapat diketahui jenis kawanan ikannya.
1.2
Tujuan
dan
Manfaat
Tujuan dari desertasi ini adalah untuk memperoleh metode yang mampu
menentukan atau mengidentifikasi jenis kawanan ikan pada kedalaman tertentu
dengan mendeteksi fase gelombang pantul akustik yang diterima serta proses
identifikasi dilakukan dengan menggunakan metode Hidden Markov Model.
Manfaat penelitian ini adalah untuk mengembangkan teknologi perikanan
mempermudah para nelayan untuk memperoleh ikan tangkap yang diinginkan.
Disamping itu pula manfaat teknologi ini untuk pengembangan teknologi untuk
1) menerapkan beberapa aplikasi lainnya dengan menggunakan metode
pendeteksian perubahan fase dari gelombang pantul suatu gerakan
sekelompok obyek yamg diamati dan
2) menentukan jenis kawanan ikan langsung di laut lepas dalam
jangkauan yang lebih luas
1.3
Lingkup
Kegiatan
Lingkup kegiatan dalam penelitian ini meliputi :
1) Rancang bangun peralatan fish school finder dengan teknologi pendeteksian fase gelombang pantul yang diterima.
2) Rancang bangun perangkat lunak untuk mengenal/identifikasi jenis
kawanan ikan yang diamati dengan metode Hidden Markov Model. 3) Simulasi perubahan fase dalam bentuk ikan-ikanan
4) Simulasi pengaruh gangguan dalam bentuk rangkaian elektronika
5) Uji coba baik di dalam kolam dan keramba di laut.
6) Proses pengenalan dengan metode Hidden Markov Model
1.4
Batasan
Dalam disertasi ini pelaksanaanya dibatasi dengan ketentuan sebagai
berikut :
1) Dilakukan di kolam dan di dalam keramba di laut (tidak dilakukan di laut
lepas).
2) Uji coba dilakukan pada beberapa jenis ikan, tetapi pengamatan dilakukan
secara bergantian hanya untuk satu jenis ikan bukan multi species yang diamati, baik di dalam kolam maupun di dalam keramba dalam setiap
percobaan.
3) Jumlah dan jenis ikan yang digunakan terbatas pada jenis ikan yang dapat
4) Sinyal atau gelombang akustik yang dipancarkan menggunakan gelombang
kontinyu dan tidak menggunakan gelombang periodik atau pulsa seperti
halnya pada perangkat fish finder umumnya.
5) Posisi pengamatan dilakukan kearah horisontal obyek (kawanan
ikan-ikanan) atau lateral aspect untuk kawanan ikan
6) Untuk pengujian menggunakan dua transducer terpisah untuk pemancar
dan penerima dan tidak menggunakan satu transducer baik untuk pemancar
maupun untuk penerima.
7) Daya pancar yang digunakan dibatasi sebesar 10 Watt yaitu sebesar daya
minimum dari transducer Simrad yang digunakan.
8) Transducer yang digunakan adalah transducer yang ada di pasar dan bukan
khusus dipesan sehingga beam width yang digunakan terbatas
9) Proses pengenalan (recognition) dilakukan tidak langsung pada ikan yang diamati tetapi menggunakan gelombang gerakan ikan hasil rekaman pada
komputer terpisah.
1.5
Perumusan Hipotesis
1.5.1 Perubahan fase akibat gerakan target pantulan dengan bentuk random
Gambar 1 memperlihatkan proses terjadinya perubahan fase akibat adanya
gerakan target pantul dengan permukaan yang tidak rata, atau berubah-ubah.
Waktu gelombang pantul yang diterima adalah :
τ
=
c L
2 1+
- nT (1)
sedangkan besarnya perbedaan fase antara gelombang pantul yang diterima
dengan gelombang datang adalah :
φ
π
2
=T
τ
Æ
φ
=
T
πτ
2
(2)
Gambar 1. Proses perubahan fase gelombang pantul dari target yang bergerak dimana TX adalah transducer pemancar dan Rx adalah transducer penerima.
Dengan mensubtitusikan persamaan 2 ke persamaan 1 maka besarnya perbedaan
fase antara gelombang pantul yang diterima dengan gelombang datang adalah : Gelombang datang
0 φ π 2π
T
t θ Gelombang pantul
yang diterima
τ
n T TX
RX
2 L l
l(t)
t Pergerakan target
L
RX
⎥
⎦
⎤
⎢
⎣
⎡
−
+
=
f
n
c
L
f
c
fl
2
2
2
π
π
φ
(3)Bila l berubah sesuai dengan pergerakan dan bentuk target maka persamaan
dapat ditulis sebagai berikut :
⎥
⎦
⎤
⎢
⎣
⎡
−
+
=
f
n
c
L
f
dt
dl
c
f
dt
d
2
2
2
π
π
φ
(4)
dimana c adalah kecepatan suara di dalam air, f frekuensi sinyal yang
dipancarkan. Dari persamaan di atas fase gelombang φ (t) berubah secara linear
terhadap perubahan simpangan target l (t) dimana target berubah secara random
tergantung dari pergerakan target yang meliputi kecepatan dan bentuk perubahan
dari target tersebut. Untuk singkatnya persamaan 4 dapat ditulis sebagai berikut
2 1
C
dt
dl
C
dt
d
φ
=
+
(5)
atau dapat juga ditulis
2 1 ( )
)
(t = C l t +C
φ
(6)dimana
φ (t)
adalah perubahan fase gelombang sinyal yang dipantulkan, l(t) perubahan simpangan target pantulan yang besarnya tergantung dari bentuk(manuver) dan kecepatan pergerakan target pantulan.
Dari perumusan tersebut di atas diajukan hipotesis sebagai berikut :
1.5.2 Gerakan schooling berbagai jenis ikan
Gerakan kawanan ikan (schooling) berbeda tergantung jenisnya dan dibedakan oleh beberapa faktor yaitu :
1. Besarnya simpangan gerakan (l)
2. Kecepatan simpangan [l(t)] dan kecepatan berenang
3. Kepadatan ikan vertikal atau jumlah dan jarak lapisan vertikal schooling / kawanan ikan
4. Jarak vertikal antar ikan dalam suatu kelompok
5. Besar, bentuk dan panjang ikan.
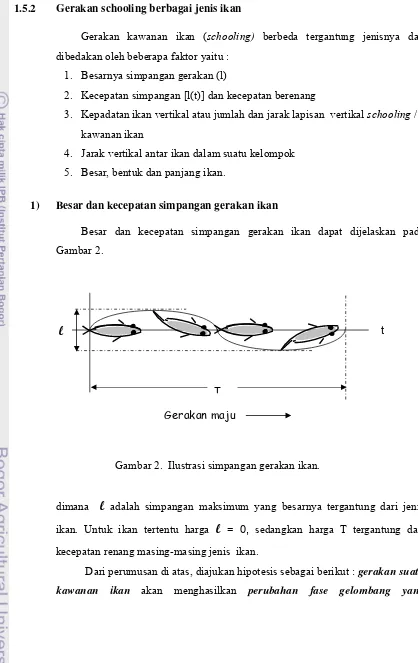
1) Besar dan kecepatan simpangan gerakan ikan
[image:34.612.87.505.100.763.2]Besar dan kecepatan simpangan gerakan ikan dapat dijelaskan pada
Gambar 2.
Gambar 2. Ilustrasi simpangan gerakan ikan.
dimana
l
adalah simpangan maksimum yang besarnya tergantung dari jenisikan. Untuk ikan tertentu harga
l
= 0, sedangkan harga T tergantung darikecepatan renang masing-masing jenis ikan.
Dari perumusan di atas, diajukan hipotesis sebagai berikut : gerakan suatu kawanan ikan akan menghasilkan perubahan fase gelombang yang
t
dipantulkan yang bentuknya tergantung dari besar simpangan dan kecepatannya.
2) Formasi horisontal atau jumlah lapisan schooling ikan
Jumlah dan jarak lapisan schooling ikan tampak atas (dorsal aspect)
dapat dijelaskan pada Gambar 3. Dari gambar dapat dilihat, makin besar jarak
antar individu , lapisan ke tiga atau seterusnya makin berpengaruh. Pada gambar
lapisan ketiga tidak berpengaruh karena panjang per individu lebih kecil dari
jarak antar individu sehingga saat lapisan ketiga mendapat gelombang datang
tetapi gelombang pantulnya terhalang oleh lapisan kedua, maka pada saat
tersebut besar fase yang diterima adalah nol. (
φ
t3 -φ
t4). Jadi ketentuan tersebut berlaku bila panjang ikan jauh lebih besar dari panjang gelombangdatang (yang dipancarkan).
Gambar 3. Formasi schooling horisontal sebagai fungsi fasa,
φ(
t).Dari perumusan di atas, diajukan hipotesis sebagai berikut: formasi horisontal
suatu obyek bergerak yang tersusun dalam format tertentu akan menghasilkan
suatu perubahan fase gelombang yang dipantulkan yang bentuknya tergantung dari susunan horisontal schooling kawanan ikan.
φ
t2φ
t5φ
t6φ
t3φ
t1φ
t73) Formasi vertikal schooling ikan
Struktur schooling ikan terdiri dari 3 (tiga) jenis formasi vertikal yaitu : 1. Formasi belah ketupat
2. Formasi jajaran jenjang
3. Formasi persegi empat
sedangkan untuk ikan bersisik, sisik ikan akan berpengaruh bila panjang satu
sisik lebih dari 0.7. Pada Gambar 4 dapat dilihat pengaruh perubahan fase
struktur schooling ikan dilihat dari arah samping untuk formasi belah ketupat.
[image:36.612.90.466.275.674.2]
Gambar 4. Perubahan fase akibat formasi vertikal schooling ikan.
φ(
t) Resultanteφ(
t)φ(
t) Lapisan 1φ(
t) Lapisan 2Lapisan 4
1.5.3 Pengaruh gangguan
Gangguan (interferences) yang terdapat di dalam laut adalah getaran dari suara ikan, suara ombak, getaran suara motor dengan frekuensi dibawah 5 kHz
dan getaran gelombang fish finder atau echo sounder yang mempunyai frekuensi sekitar 36 kHz sampai dengan 200 kHz.
1) Frekuensi kerja / pembawa tidak sama dengan frekuensi gangguan
Dengan menggunakan transistor dengan bandwidth 10 kHz (frekuensi audio), frekuensi yang dapat diterima oleh penerima (receiver) berkisar dari 190 kHz sampai 210 kHz sehingga frekuensi-frekuensi gangguan tersebut di atas
tidak dapat diterima oleh penerima kecuali yang menggunakan frekuensi 200
kHz. Demikian pula transduser yang digunakan hanya untuk frekuensi kerja
tertentu sehingga tidak dapat mendeteksi frekuensi lainnya.
2) Gangguan terhadap frekuensi yang sama dengan frekuensi echo sounder atau fish finder yang beroperasi disekitarnya
Sinyal pantul dari gerakan ikan
Vi = C [cos (ωct + φ(t)] (7)
Sinyal pantul dari echo sounder atau fish finder yang masuk ke penerima
Vn = N [cos (ωct + Δφ)] (8)
Sinyal yang keluar dari detektor fase adalah :
Vo = {C [cos (ωct + φ(t))] + N [cos (ωct + Δφ)]} sin (ωct)
= C [cos (ωct + φ(t))]. sin (ωct) + N [cos (ωct + Δφ)]. sin (ωct)
= sin (φ(t)) + sin (Δφ) (9)
Δφ adalah konstan sehingga sin (Δφ) = 0 jadi Vo tidak dipengaruhi oleh
gangguan dari perangkat echo sounder lainnya.
3) Gangguan terhadap gelombang-gelombang pantul disekitarnya
Akibat adanya obyek-obyek yang dapat memantulkan gelombang yang
dipancarkan oleh transduser maka akan terjadi gangguan terhadap gelombang
Sinyal pantul dari gerakan ikan
Vi = C [cos (ωct + φ(t)] (10)
dimana
ω
c= 2
π
f
cfc = frekuensi gelombang pembawa (carrier) atau gelombang akustik
φ(t)] = perubahan fase
Sinyal pantul dari obyek sekitarnya yang masuk ke penerima
Vn = C1 [cos (ωct + Δφ1)] + C2 [cos (ωct + Δφ2)]
+ C3 [cos (ωct + Δφ3)] (11)
Sinyal yang keluar phase detektor adalah :
Vo = {C [cos (ωct + φ(t))] + C1 [cos (ωct + Δφ1)] + C2 [cos (ωct + Δφ2)]
+ C3 [cos (ωct + Δφ3)] } sin (ωct)
= C [cos (ωct + φ(t))]. sin (ωct) + C1 [cos (ωct + Δφ1)]. sin (ωct)
+ C2 [cos (ωct + Δφ2)]. sin (ωct) + C3 [cos (ωct + Δφ3)].
sin (ωct)
= sin (φ(t)) + sin (Δφ1) + sin (Δφ2) + sin (Δφ3) (12)
dimana Δφ1, Δφ2, Δφ3, adalah konstan sehingga sin (Δφ1) = sin (Δφ2) = sin
(Δφ3) = 0 jadi Vo tidak dipengaruhi oleh noise dari sinyal pantul obyek di sekitarnya.
4) Gangguan terhadap gelombang pantul dari pantulan kawanan ikan
Sinyal pantul akibat pantulan dari kawanan ikan tertentu ada
kemungkinan dipantulkan oleh obyek-obyek disekitarnya (Gambar 5)
Adapun terhadap gelombang pantul tersebut secara matematis sebagai
berikut : Sinyal pantul dari gerakan ikan
Vi = C [cos (ωct + φ(t)] (13)
Vn = C1 [cos (ωct + φ(t) + Δφ1)] + C2 [cos (ωct + φ(t) + Δφ2)] + C3 [cos
(ωct + φ(t) + Δφ3)]
Gambar 5 Gangguan gelombang pantul dari gelombang yang dipantulkan kawanan ikan.
Sinyal yang keluar dari detektor fase adalah :
Vo = {C [cos (ωct + φ(t))] + C1 [cos (ωct + φ(t) + Δφ1)] + C2 [cos (ωct +
φ(t) + Δφ2)] + C3 [cos (ωct + φ(t) + Δφ3)]} sin (ωct)
= C [cos (ωct + φ(t))]. sin (ωct) + C1 [cos (ωct + φ(t) + Δφ1)] sin
(ωct)+ C2 [cos (ωct + φ(t) + Δφ2)]. sin (ωct) + C3 [cos (ωct + φ(t) +
Δφ3)]. sin (ωct)
= sin (φ(t)) + sin (φ(t) + Δφ1) + sin (φ(t) + Δφ2) + sin (φ(t) +Δφ3) (14)
hal ini berakibat perubahan bentuk dari sinyal yang diterima seperti pada
Gambar 6.
Gambar 6. Bentuk gelombang yang dihasilkan dari gabungan beberapa gelombang dengan frekuensi yang sama tetapi berbeda fase.
Bentuk gelombang yang dihasilkan tersebut tergantung dari jarak pantul
dari jarak tempuh juga tergantung dari Target Strength (TS) ikan yang dipantulkan.
Dari perumusan pengaruh dari beberapa jenis gangguan terhadap
penerimaan perubahan fase dari gelombang pantul obyek bergerak atau gerakan
kawanan ikan di atas, diajukan hipotesis sebagai berikut :
Gangguan akibat pantulan oleh obyek disekitarnya, dari perangkat lainnya dengan frekuensi sama dengan frekuensi keja alat dan dari bising suara mesin, tidak mempengaruhi perubahan fase gelombang pantul dari gerakan kawanan ikan atau obyek yang bergerak.
1.5.4 Posisi transducer terhadap arah gerakan kawanan ikan ke arah horisontal
Dalam kenyataan kawanan ikan yang akan diamati arah gerakannya tidak
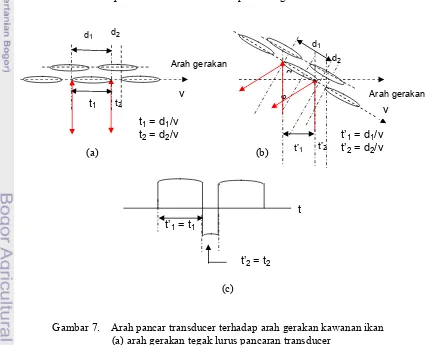
[image:40.612.82.512.354.699.2]selalu tegak lurus terhadap arah pancar transducer secara horisontal. Berdasarkan
Gambar 7 posisi transducer terhadap arah gerakan kawanan ikan tidak
(a) (b)
(c)
Gambar 7. Arah pancar transducer terhadap arah gerakan kawanan ikan (a) arah gerakan tegak lurus pancaran transducer
(b) arah gerakan φ0 terhadap arah pancar transducer (c) bentuk gelombang pantul yang dihasilkan.
Arah gerakan
α φ
v
t’2
t’1
ϕ
d1
d2
Arah gerakan
t1
v
t2
d1 d2
t1 = d1/v
t2 = d2/v t’1 = d1/v
t’2 = d2/v
t
t’2 = t2
mempengaruhi bentuk gelombang yang dipantulkan gerakan kawanan ikan
tersebut. Hal tersebut dapat dikatakan juga arah gerakan kawanan ikan terhadap
posisi transducer tidak berpengaruh sehingga perubahan fase dari gelombang
pantul yang diterima tidak terpengaruh arah datangnya kawanan ikan yang
diamati.
Dari perumusan di atas, diajukan hipotesis sebagai berikut : pengaruh
terhadap posisi transducer terhadap arah gerakan kawanan ikan tidak mempengaruhi perubahan fase gelombang yang dipantulkan oleh gerakan kawanan ikan.
1.5.5 Pengaruh pantulan pada permukaan perairan
Pengaruh pantulan pada permukaan perairan terjadi bila gelombang
dipancarkan kearah horisontal. Peristiwa ini dapat terjadi bila jarak transducer
sedemikian dekatnya dengan permukaan perairan sehingga dapat terjadi pantulan
pada permukaan perairan. Hal ini disebabkan adanya perbedaan indeks bias antara
udara dengan air . Bedasarkan hukum Snellius, bila gelombang mengenai lapisan yang berbeda indeks biasnya akan terjadi pantulan atau pembiasan tergantung dari
besar sudut datangnya. Untuk gelombang yang arah rambatannya horisontal, makin
jauh jaraknya, makin besar sudut datangnya sehingga pada saat sudut datangnya
besarnya adalah (critical angle) :
i
Sinθ
= 0,707
udara air
η η
(15)
dimana ηair = indeks bias air = εair = 1.26
ηudara = indeks bias udara = 1
maka sudut datang kritis (critical angle) θi = 63o. Jika θi > 63omaka gelombang akan dibiaskan ke udara. Untuk transducer dengan beamwidth 450, untuk sudut 630 redamannya terhadap daya pada sudut 00 atau pada arah horisontal adalah 63/45 x
sudut 150 turun 3 dB. Untuk menghindari adanya pantulan pada perumukaan
perairan, digunakan transducer dengan beamwidth sekecil mungkin. Meskipun demikian dari hipotesis pada Subbab 1.5.3 (3), gelombang yang dipantulkan obyek
disekitarnya termasuk permukaan perairan tidak berpengaruh nyata. Dari
perumusan di atas, diajukan hipotesis sebagai berikut : pengaruh pantulan dari permukaan perairan dapat diredam sesuai dengan hipotesis pada Subbab 1.5.3. 3).
1.5.6 Pengaruh azas Doppler
Pengaruh azas Doppler terhadap gelombang yang dipantulkan gerakan
kawanan ikan terjadi bila arus air mengalir searah rambatan gelombang ke arah
penerima. Perubahan frekuensi yang terjadi besarnya tergantung dari kecepatan
arus air kearah penerima yang diwakili oleh partikel-pertikel yang menyerap
energi gelombang tersebut dalam air. Dengan mangacu hipotesis pada Subbab
1.5.3.3), frekuensi Doppler tersebut tidak berpengaruh. Dari perumusan di atas,
diajukan hipotesis sebagai berikut : azas Doppler berpengaruh tetapi dapat diredam sesuai dengan hipotesis pada Subbab 1.5.3. 3).
1.5.7 Posisi transducer terhadap gerakan kawanan ikan kearah vertikal
Pada Gambar 8 dapat dilihat posisi transducer terhadap kawanan ikan kearah vertikal dimana posisinya dinyatakan dengan sudut α.
Gambar 8. Posisi tranducer membentuk sudut
α
secara vertikal terhadap gerakan ikan.α
tα
Tinggi badan ikan yang terdeteksi adalah
t
’ yang besarnya =t
Cosα
.
Makin besar sudut α, makin kecil tinggi badan ikan yang terdeteksi dan ukurannya
tidak lagi mendekati tinggi sesungguhnya. Untuk mengetahui sudut α yang
optimum perlu dilakukan uji coba tersendiri diluar dari penelitian yang saat ini
dilakukan yang dibatasi untuk pancaran kearah horizontal (lateral aspect).
1.6
Sistimatika
Penulisan
Penulisan disertasi ini terdiri dari 9 (sembilan) bab yaitu
Bab 1 : Menjelaskan latar belakang, tujuan, lingkup kegiatan, luaran yang
diharapkan dan batasan-batasan yang tidak dibahas dalam penelitian
ini. Dalam bab ini dijelaskan pula hipotesis hasil-hasil yang akan
diharapkan berdasarkan teori yang ada.
Bab 2 : Menjelaskan teori-teori yang menunjang proses penelitian dalam disertasi
Bab 3 : Bab ini menjelaskan metodologi penelitian yang akan dilakukan
Bab 4 : Bab ini menjelaskan rancang bangun pendeteksi jenis ikan yang
dapat mendeteksi jenis ikan yang diamati berdasarkan pendeteksian fase
gelombang pantul gerakan kawanan ikan yang diamati, dan rancang
bangun perangkat lunak proses pengenalan dengan menggunakan metode
Hidden Markov Model
Bab 5 : Menjelaskan proses simulasi perubahan fase dari penerimaan
penerimaan gelombang pantul akibat gerakan kawanan berbagai bentuk
ikan-ikanan yang dilakukan dengan menggunakan motor listrik dan
simulasi pengaruh berbagai gangguan dengan menggunakan rangkaian
elektronika
Bab 6 : Bab ini menjelaskan proses uji coba di dalam kolam dan di keramba laut
Bab7 : Bab ini memperlihatkan proses pengenalan (recognition) dengan menggunakan metode Hidden Markov Model.
Bab 8 : Dalam bab ini dibahas analisis hasil uji coba yang telah dilakukan serta
hasil proses pengenalan dengan metode Hidden Markov Model
2 TINJAUAN PUSTAKA
2.1
Gerakan Kawanan Ikan
Gerakan kawanan jenis ikan tertentu di perairan baik di laut maupun di air
tawar terdiri dari 3 (tiga) gerakan yaitu : schooling, shoaling dan soliter. Pada penelitian ini akan dibahas ikan bergerak secara schooling dan ikan yang bergerak secara shoaling
Dilihat dari gerakannya pengertian schooling suatu kelompok ikan diartikan bermacam-macam oleh beberapa pakar antara lain :
1) Breder dan Halpern (1946) : schooling adalah kelompok ikan yang mempunyai kesamaan orientasi, dengan jarak antar individu sama dan
berenang dengan kecepatan yang sama.
2) Breder (1967) : schooling adalah untuk species hampir seluruh hidupnya berenang dengan polarisasi yang sama dan mempunyai kelompok yang
permanen.
3) Radakov (1973) : school adalah sebuah kelompok ikan yang berenang bersama-sama.
4) Shaw (1983) : menyatakan bahwa kelompok dari ikan secara kesatuan
melakukan atraksi secara bersamaan.
5) Pitcher (1983) : mendefinisikan schooling adalah ikan yang berenang terpolarisasi dan sinkron..
6) Partridge (1982) : tiga atau beberapa kelompok ikan dimana setiap
anggotanya (individu) secara konstan mengatur (adjust) kecepatan dan arahnya sesuai dengan gerakan ikan-ikan lainnya.
Tetapi pada prinsipnya schooling dapat disimpulkan adalah pergerakan kawanan ikan tertentu dengan pola, arah (polarisasi), dengan irama dan struktur
yang sama untuk setiap individu.
Sekumpulan ikan yang secara individual koordinasinya tidak terlalu ketat
Fungsi dari schooling dari kawanan ikan adalah : 1) Menghindari serangan dari predator
2) Mencari makan yang efektif
3) Keuntungan dalam hidrodinamik
4) Migrasi
5) Reproduksi
6) Pembelajaran
Kepadatan schooling ikan (jumlah ikan per unit volume) tergantung dari jenis dan panjang ikan (Pitcher and Partridge, 1979). Makin panjang makin kecil
kepadatannya. Pada Gambar 9 dapat dilihat kepadatan ikan dalam satu schooling
untuk tiga jenis ikan yaitu saithe, heering (kembung) dan sprat. Pada Gambar 10 dapat dilihat volume rata-rata per ikan untuk schooling saithe lebih besar dari
schooling herring. Dari hasil pengamatan beberapa pakar, antara lain untuk herring dengan panjang 27 cm, kepadatannya dalam akuarium berukuran 0,7 m3,
kepadatannya mencapai 60 per m3 (Foote, 1983), sedangkan kondisi
Gambar 9. Kepadatan schooling yang berhubungan dengan panjang ikan untuk jenis-jenis saithe, herring, dan sprat.
Gambar 10. kepadatan schooling herring (Misund and Floen, 1993).
dimana herring berenang bebas, kepadatannya rata-rata mencapai 2 ikan per m3
(Misund, 1993b). Untuk ikan jenis saithe dengan ukuran 35 cm mempunyai
kepadatan sekitar 100 per m3 dan sprat dengan panjang 10 cm, kepadatannya
sekitar 200 m3 (Rottingen, 1976). Berdasarkan hasil pengamatan echo sounder
dari tiga transect, diperoleh gambaran dimana setiap transect diperoleh bentuk
schooling yang berbeda dengan kepadatan per transect yang bervariasi. Gambar 10 memperlihatkan bentuk dan kepadatan schooling herring dari pandangan horisontal sangat bervariasi. Umumnya bagian dalam schooling
mempunyai kepadatan yang paling besar
Dari hasil pengamatan yang dilakukan oleh Freon, (1992) melalui udara
[image:47.612.157.500.184.390.2](pesawat terbang) selama satu jam diperoleh bentuk schooling secara horisontal dari jenis harengula clupeola selalu berubah-ubah (Gambar 11)
Gambar 11. Perubahan bentuk schooling harengula clupeola dari pandangan horisontal selama pengamatan satu jam. (Freon et.al., 1992).
Pada gambar dapat dilihat selama periode satu jam, luas permukaan
schooling berubah dari 145 – 522 m2. beberapa sepecies seperti herring, bentuk
schoolingnya mempunyai perubahan yang lebih kecil dibandingkan dengan species lainnya (Partridge et. al, 1980)
Ikan berenang membentuk pola tertentu tergantung dari jenis ikan.
Umumnya semua jenis ikan berenang dengan membentuk barisan berupa kisi-kisi
(a)
[image:48.612.190.421.96.494.2]
(b)
Gambar 12. Posisi antar individu untuk tiga jenis ikan, seithe, herring dan cod dilihat dari pandangan (a) atas (horisontal) dan (b) vertical (Partridge et al., 1980).
posisi antar individu dari tiga jenis ikan yaitu saithe, herring dan cod. Baik secara
vertikal maupun horizontal (Partridge et. al, 1980).
Umumnya schooling atau shoaling campuran beberapa jenis ikan terdapat pada kawanan ikan demersal atau semi demersal dan beberapa perairan terumbu
karang di daerah tropis (Ehrlich, 1973, Alevizon, 1976). Akan tetapi ada pula
untuk ikan pelagis yang umumnya campuran jenis ikan tertentu misalnya dari
hasil pengamatan in situ juvenile anchovetas (cetengraulis mysticetus) dengan flatiron herring (Hobson, 1963) di di perairan Teluk California. Demikian pula
anchoy (engraulix mordax) berenang dikelilingi schooling californian sardines anchovy (sardinops sagax). Di perairan Indonesia belum ada pengamatan yang meneliti schooling ikan yang berenang campuran.
2.2
Gerakan Ikan secara Individu
(Bone,1978)Gerakan ikan dilihat dari pandangan horisontal (lateral aspect) terdapat 2 (dua) gerakan yaitu :
1. Pectoral fin movement, adalah gerakan ikan yang diakibatkan adanya dorongan dari gerakan sirip pectoral, contohnya untuk ikan karang pada umumnya (typical coral fish) seperti