DEPARTEMEN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA
MEDAN
2010
TUGAS AKHIR
PENGARUH PERUBAHAN TEGANGAN TERHADAP
EFISIENSI PADA MOTOR INDUKSI TIGA FASA
(Aplikasi Pada Laboratorium Konversi Energi Listrik FT –USU)
Oleh :NAMA : ANTONI FRANCISCUS SIBURIAN
KATA PENGANTAR
Puji syukur penulis panjatkan kehadirat Tuhan Yang Maha Esa dan Penuh Kasih atas
rahmat dan karunia yang dilimpahkan sehingga dapat menyelesaikan Tugas Akhir ini.
Adapun Tugas Akhir ini dibuat untuk memenuhi syarat kesarjanaan di Departemen Teknik
Elektro, Fakultas Teknik Universitas Sumatera Utara.
Tugas akhir ini penulis persembahkan kepada yang teristimewa yaitu ayahanda
Parsaoran Siburian (Alm) dan ibunda Sorta Riani br. Sihotang, serta abang, Alberth Tulus
Siburian beserta istrinya dan kakak,Yolanda Sartika br. Siburian beserta suaminya yang
merupakan bagian hidup penulis yang senantiasa mendukung dan mendoakan dari sejak
penulis lahir hingga sekarang. Dan juga keponakan-keponakanku Kezia br. Siahaan, Andrew
Gabriel Siburian dan Evan (Ucok) Siahaan, yang sudah banyak menghibur penulis.
Selama masa perkuliahan sampai masa penyelesaian tugas akhir ini, penulis banyak
memperoleh bimbingan dan dukungan dari berbagai pihak. Untuk itu, dengan setulus hati
penulis menyampaikan ucapan terima kasih yang sebesar-besarnya kepada :
1. Bapak Ir. Eddy Warman, selaku dosen Pembimbing Tugas Akhir, atas segala
bimbingan, pengarahan dan motivasi dalam menyelesaikan Tugas Akhir ini.
2. Bapak Ir. Masykur Sjani, selaku dosen Pembimbing Akademik penulis, atas
bimbingan dan arahannya dalam menyelesaikan perkuliahan.
3. Bapak Prof. Dr. Ir. Usman Baafai selaku Ketua Departemen Teknik Elektro FT-USU
dan Bapak Rachmad Fauzi, S.T, M.T, selaku Sekretaris Departemen Teknik Elektro
4. Seluruh Staf Pengajar di Departemen Teknik Elektro USU dan Seluruh Karyawan di
Jurusan Teknik Elektro Fakultas Teknik Elektro USU.
5. Terindah, Keluargaku yang lain, yang sudah banyak mendukung penulis baik suka
maupun duka, dan selalu mengingatkan penulis supaya cepat tamat. Semoga Tuhan
memberkati kita.
6. Teman-teman angkatan ’05, Feri D. Hutagalung, Daniel Sembiring, Mikha Tobing,
Wosvi, Herman, Su’ib, Reza, Gifari, Erisa dan lain-lain yang tak dapat penulis
sebutkan satu persatu.
7. Asisten laboratorium konversi FT. USU, tempat penulis mengambil data bagian
mesin Asinkron (Induksi), Muhammad Ikbal dan adik – adik angkatan ’06 lainnya.
8. Abang dan kakak angkatan di Elektro, Kak Hanna, Bang Agus, Bang Didi, dan abang
– kakakku yang lain yang tak dapat penulis sebutkan satu persatu.
9. Dan pihak-pihak yang tidak dapat penulis sebutkan satu persatu.
Akhir kata, tugas akhir ini masih jauh dari sempurna, masih banyak kesalahan dan
kekurangan, namun penulis tetap berharap semoga tugas akhir ini bisa bermanfaat dan
memberikan inspirasi bagi pengembangan selanjutnya dan Tuhan memberkati kita semua.
Terima kasih.
Medan, November 2010
Penulis
Antoni Franciscus Siburian
ABSTRAK
Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya, memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan, dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri.
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... v
DAFTAR GAMBAR ... ix
BAB I PENDAHULUAN I.1. Latar Belakang Masalah ... 1
I.2. Tujuan Penulisan ... 1
I.3. Manfaat Penulisan Tugas Akhir ... 2
I.4. Batasan Masalah ... 2
I.5. Metode Penulisan ... 3
I.6. Sistematika Penulisan ... 4
II.1.1. Konstruksi Mesin Induksi ( Mesin Asinkron) Tiga Fasa ... 6
II.1.1.1. Motor Induksi 3 ( Tiga) Fasa ... 6
II.1.1.1.1. Konstruksi Motor Induksi Tiga Fasa ... 7
II.1.1.2. Generator Induksi Tiga Fasa ... 10
II.1.1.2.1. Prinsip Kerja Generator Induksi Tiga Fasa ... 11
BAB III MOTOR INDUKSI TIGA FASA III.1. Umum ... 14
III.2. Konstruksi Motor Induksi Tiga Fasa ... 15
III.3. Jenis Motor Induksi Tiga Fasa ... 16
III.3.1. Motor Induksi Tiga Fasa Sangkar Tupai ... 16
III.3.2. Motor Induksi Tiga Fasa Rotor Belitan ... 18
III.4. Prinsip Kerja Motor Induksi Tiga Fasa ... 19
III.5. Medan Putar ... 24
III.5.1. Analisa Medan Putar secara Vektor dan Perhitungan ... 25
III.6.2. Ditinjau Dari Sisi Stator ... 32
III.7. Aliran Daya dan Arus Motor Induksi Tiga Fasa... 35
III.8. Frekuensi Rotor ... 38
III.9. Efisiensi ... 39
III.10. Pengaruh Perubahan Tegangan Terhadap Efisiensi ... 41
BAB IV PENGARUH PERUBAHAN TEGANGAN TERHADAP EFISIENSI PADA MOTOR INDUKSI 3 (TIGA) FASA IV.1. Umum ... 43
IV.1.1. Peralatan Percobaan ... 44
IV.1.2. Rangkaian dan Prosedur Percobaan ... 46
IV.1.2.1.Percobaan Beban Nol Percobaan Beban Nol... 46
IV.1.2.2.Percobaan Hubung Singkat... 47
IV.1.2.3.Percobaan Pengukuran Tahanan Motor Induksi ... 48
IV.1.2.4.Percobaan Pengukuran Perbandingan Belitan ... 50
IV.1.2.5.Percobaan Pengukuran Faktor Daya Motor Induksi Dengan Perubahan Tegangan ... 52
IV.1.3.Data Percobaan ... 53
EFISIENSI MOTOR INDUKSI 3 FASA... 58
IV.2.1 Parameter Motor Induksi Tiga Fasa Rotor Belitan ... 58
IV.2.1.1. Percobaan Beban Nol ... 58
IV.2.1.2. Percobaan Hubung Singkat ... 59
IV.2.1.3. Percobaan Pengukuran Tahanan ... 60
IV.2.1.4. Percobaan Perbandingan Belitan ... 62
IV.2.2. Pengaturan Tegangan Motor Induksi Tiga Fasa ... 64
IV.2.2.1.Pengaturan tegangan motor induksi tiga fasa dengan beban yang bervariasi ... 64
IV.2.2.1.1.Kenaikan faktor daya untuk berbagai beban ... 64
IV.2.2.1.2.Besar Daya Aktif
( )
Pin , Daya Reaktif( )
Qin , dan Daya Semu( )
Sin Masukan Motor Induksi Sebelum dan Setelah Pengaturan Tegangan ... 67IV.2.2.1.3.Besar torsi dan slip motor sebelum dan setelah pengaturan tegangan masukan pada saat rotor dalam keadaan berputar ... 69
V.1. Kesimpulan ... 78
V.2. Saran ... 79
DAFTAR PUSTAKA
DAFTAR GAMBAR
2.1. Penampang rotor dan stator motor induksi ... 7
2.2. Menggambarkan komponen stator motor induksi tiga phasa ... 8
2.3. Rotor sangkar ... 9
2.4. Motor induksi rotor belitan ... 10
2.5. Prinsip kerja generator induksi penguatan sendiri ... 11
2.6. Karakteristik torsi – kecepatan mesin induksi ... 13
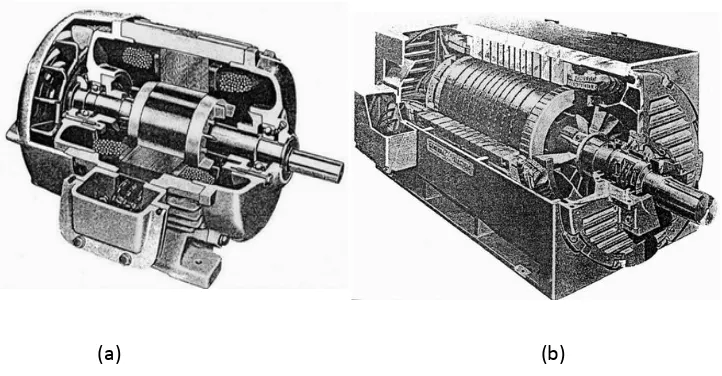
3.1. (a) Konstruksi Motor Induksi Rotor Sangkar ukuran kecil ... 17
3.2. (b) Konstruksi Motor Induksi Rotor Sangkar ukuran besar ... 17
3.3. Rotor belitan dan Konstruksi Motor Induksi Tiga Phasa dengan Rotor Belitan ... 18
3.4. Fluksi Tiga Fasa ... 19
3.5. Analisis resultan fluksi ... 20
3.6. Sudut Vektoris Tiga Phasa (α) ... 20
3.7. Rangkaian stator dan rotor belitan ... 22
3.8. Medan Putar Pada Motor Induksi 3 (Tiga) Fasa ... 25
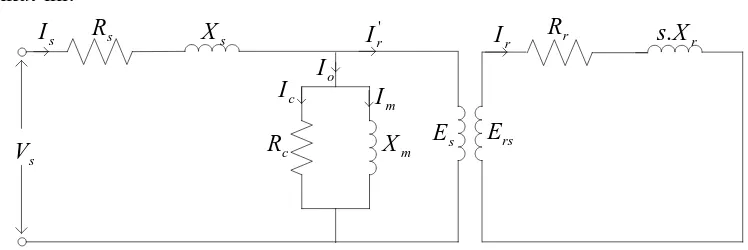
3.10. Rangkaian Ekivalen Pada Saat Motor Bergerak Dilihat Dari Rotor ... 32
3.11. Diagram vektor Pada Saat Motor Berputar Dilihat Dari Rotor ... 32
3.12. Rangkaian Ekivalen Pada Saat Motor Bergerak Dilihat Dari Stator ... 33
3.13. Diagram vektor Pada Saat Motor Berputar Dilihat Dari Stator... 33
3.14. Rangkaian Pengganti Pada Saat Motor Berputar Dilihat Dari Stator ... 34
3.15. Rangkaian Ekivalen Motor Induksi 3 Fasa ... 35
3.16. Diagram Aliran Daya Pada Motor Induksi Tiga Fasa... 36
4.1. Rangkaian Percobaan Beban Nol Pengaruh Perubahan Tegangan ... 45
4.2. Rangkaian Percobaan Hubung Singkat Pengaruh Perubahan Tegangan ... 46
4.3a. Rangkaian Percobaan Pengukuran Tahanan ditinjau dari Stator ... 47
4.3b. Rangkaian Percobaan Pengukuran Tahanan ditinjau dari Rotor ... 48
4.4a. Percobaan Perbandingan Belitan Ditinjau Dari Stator ... 49
4.4b. Percobaan Perbandingan Belitan Ditinjau Dari Rotor ... 50
4.5. Rangkaian Percobaan Pengukuran Faktor Daya dengan Perubahan Tegangan ... 51
4.6. Grafik hubungan antara tegangan masukan terhadap besar beban ... 65
4.7. Grafik hubungan antara torsi beban dengan faktor daya ... 66
5.1. Diagram Fasor Motor Induksi dengan membandingkan Beban rendah dan
ABSTRAK
Motor listrik merupakan sebuah perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik. Energi mekanik ini digunakan untuk, misalnya, memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan, dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri.
BAB I
PENDAHULUAN
I.1. LATAR BELAKANG MASALAH
Motor induksi merupakan motor arus bolak-balik yang paling luas diaplikasikan dalam dunia industri dan juga dalam rumah tangga. Motor ini mempunyai banyak keuntungan yaitu konstruksi yang kuat, sederhana serta membutuhkan perawatan yang tidak banyak.
Pada saat ini banyak digunakan motor induksi baik motor induksi satu fasa atau tiga fasa dalam kehidupan masyarakat luas. Oleh sebab itu perlu untuk diketahui bagaimana efisiensi dari motor tersebut, terutama pada motor induksi tiga fasa. Dengan mengetahui efisiensi dari motor tersebut, maka masyarakat dapat mempertimbangkan akan menggunakan motor induksi yang akan digunakan dalam kehidupan sehari – hari dan hubungannya dengan perubahan tegangan dari sumber..
I.2. TUJUAN PENULISAN
Adapun tujuan penulisan tugas akhir ini adalah :
• Untuk mengetahui seberapa besar efisiensi pada motor induksi akibat perubahan tegangan.
• Dan hal – hal apa saja yang mempengaruhi besarnya efisiensi pada motor – motor khususnya yang ada pada laboratorium konversi energi listrik.
• Bagaimana pengaruh perubahan tegangan terhadap motor induksi tersebut.
I.3. MANFAAT PENULISAN TUGAS AKHIR
Adapun manfaat penulisan tugas akhir ini adalah :
• Memberikan informasi tentang berapa besar efisiensi efisiensi motor – motor listrik yang ada pada laboratorium konversi energi listrik.
• Memberikan informasi tentang proses penghitungan efisiensi motor listik induksi 3 fasa pada laboratorium konversi energi listrik.
• Hal – hal apa saja yang mempengaruhi besar efisiensi yang diperoleh pada motor – motor listrik tersebut.
• Mengetahui bagaimana pengaruh perubahan tegangan terhadap efisiensi pada motor induksi 3 fasa.
I.4. BATASAN MASALAH
Untuk menghindari pembahasan yang meluas maka penulis akan membatasi tugas akhir ini dengan hal-hal sebagai berikut :
• Jika diperlukan, maka akan digunakan beberapa program komputer untuk perhitungan atau secara manual.
• Motor yang digunakan adalah motor induksi arus bolak balik 3 fasa yang tersedia di laboratorium konversi
• Analisis perhitungan berdasarkan peralatan yang ada tersedia di Laboratorium Konversi Energi Listrik Departemen Teknik Elektro Universitas Sumatera Utara.
• Motor induksi arus bolak-balik dianggap dalam keadaan steady state (mantap).
• Tidak membahas tentang harmonisa tegangan yang mungkin terjadi.
I.5. METODOLOGI PENULISAN
Metode penulisan yang digunakan dalam penulisan tugas akhir ini adalah:
1. Studi literatur, berupa studi kepustakaan dan kajian dari jurnal-jurnal dan artikel pendukung.
2. Studi diskusi, berupa tanya jawab dengan dosen pembimbing mengenai masalah-masalah yang timbul selama penulisan tugas akhir.
3. Studi lapangan : Mengambil data dan informasi dari Laboratorium Konversi Energi Listrik FT. USU.
Penulisan Tugas Akhir ini disajikan dengan sistematika penulisan sebagai berikut:
BAB I PENDAHULUAN
Bab ini merupakan pendahuluan yang berisikan tentang latar belakang masalah, tujuan penulisan, batasan masalah, metode penulisan, dan sistematika penulisan.
BAB II MESIN INDUKSI ( MESIN ASINKRON )
Bab ini membahas tentang mesin induksi dan pembagiannya.
BAB III MOTOR INDUKSI ( MOTOR ASINKRON )
Bab ini membahas tentang cara menjalankan, prinsip kerja, karakteristik, dan kinerja dari motor induksi ( asinkron ).
BAB IV PENGARUH PERUBAHAN TEGANGAN TERHADAP
EFISIENSI MOTOR INDUKSI 3 FASA ( MOTOR
Bab ini menerangkan tentang perhitungan efisiensi yang diperoleh dari motor induksi 3 fasa dengan perubahan tegangan yang terjadi.
BAB V KESIMPULAN DAN SARAN
BAB II
MESIN INDUKSI TIGA FASA
II.1. Umum
Mesin Induksi 3 fasa atau mesin tak serempak dibagi atas dua jenis yaitu : 1. Motor Induksi 3 fasa
2. Generator Induksi 3 fasa, yang pada umumnya disebut alternator.
Pada umumnya dari kedua jenis yang di atas,yang paling sering digunakan adalah motor induksi 3 fasa. Generator induksi 3 fasa (Alternator) jarang digunakan dalam kehidupan masyarakat. Pada umumya yang namanya generator, indentik dengan penghasil daya/tegangan. Tetapi dalam masyarakat luas lebih sering digunakan generator sinkron atau serempak.
II.1.1. Konstruksi Mesin Induksi (Mesin Asinkron) Tiga Fasa
Mesin Induksi (Mesin Asinkron) yang terbagi atas 2 yaitu motor induksi dan generator induksi (Alternator). Sehingga konstruksinya diuraikan atas motor dan generator yang dijelaskan di bawah ini :
Motor induksi merupakan motor arus bolak – balik ( AC ) yang paling luas
digunakan dan dapat dijumpai dalam setiap aplikasi industri maupun rumah tangga. Penamaannya berasal dari kenyataan bahwa arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antara putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan arus stator.
Motor ini memiliki konstruksi yang kuat, sederhana, handal, serta berbiaya murah. Di samping itu motor ini juga memiliki effisiensi yang tinggi saat berbeban penuh dan tidak membutuhkan perawatan yang banyak. Akan tetapi jika dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam hal pengaturan kecepatan. Dimana pada motor induksi pengaturan kecepatan sangat sukar untuk dilakukan, sementara pada motor DC hal yang sama tidak dijumpai.
II.1.1.1.1. Konstruksi Motor Induksi Tiga Phasa
Rotor
Stator
Gambar 2.1. Penampang rotor dan stator motor induksi.
Komponen stator adalah bagian terluar dari motor yang merupakan bagian yang diam dan mengalirkan arus phasa. Stator terdiri atas tumpukan laminasi inti yang memiliki alur yang menjadi tempat kumparan dililitkan yang berbentuk silindris. Alur pada tumpukan laminasi inti diisolasi dengan kertas (Gambar 2.2.(b)). Tiap elemen laminasi inti dibentuk dari lembaran besi (Gambar 2.2 (a)). Tiap lembaran besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan phasa dimana untuk motor tiga phasa, belitan tersebut terpisah secara listrik sebesar 120o. Kawat kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2.(c)). Berikut ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang luar untuk motor induksi tiga phasa.
Gambar 2.2. Menggambarkan komponen stator motor induksi tiga phasa,
(a) Lempengan inti,
(b) Tumpukan inti dengan kertas isolasi pada beberapa alurnya.
(c) Tumpukan inti dan kumparan dalam cangkang stator.
Rotor motor induksi tiga phasa dapat dibedakan menjadi dua jenis yaitu rotor sangkar (squirrel cage rotor) dan rotor belitan (wound rotor). Rotor sangkar terdiri dari susunan batang konduktor yang dibentangkan ke dalam slot – slot yang terdapat pada permukaan rotor dan tiap – tiap ujungnya dihubung singkat dengan menggunakan shorting rings.
(a) (b)
Gambar 2.3. Rotor sangkar
(a) Tipikal rotor sangkar
(b) Bagian – bagian rotor sangkar
Sementara itu pada rotor belitan, rotornya dibentuk dari satu set belitan tiga phasa yang merupakan bayangan dari belitan statornya. Biasanya belitan tiga phasa dari rotor ini terhubung Y dan kemudian tiap - tiap ujung dari tiga kawat rotor tersebut diikatkan pada slip ring yang berada pada poros rotor. Pada motor induksi rotor belitan, rangkaian rotornya dirancang untuk dapat disisipkan dengan tahanan eksternal, yang mana hal ini akan memberikan keuntungan dalam memodifikasi karakteristik torsi – kecepatan dari motor.
(a) (b)
Gambar 2.4. (a) Rotor belitan
(b) Motor induksi rotor belitan
II.1.1.2. Generator Induksi 3 fasa
dengan mengambil arus eksitasi dari jala – jala dan mesin bekerja dengan slip lebih besar dari nol sampai satu ( 0 ≤ s ≤ 1 ).
Jika mesin dioperasikan sebagai generator, maka diperlukan daya mekanis untuk memutar rotornya searah dengan arah medan putar melebihi kecepatan sinkronnya dan sumber daya reaktif untuk memenuhi kebutuhan arus eksitasinya. Kebutuhan daya reaktif dapat diperoleh dari jala – jala atau dari suatu kapasitor. Tanpa adanya daya reaktif, mesin induksi yang dioperasikan sebagai generator tidak menghasilkan tegangan. Jika generator induksi terhubung dengan jala – jala, maka kebutuhan daya reaktif diambil dari jala – jala. Namun, bila generator induksi tidak tehubung dengan jala – jala, maka kebutuhan daya reaktif dapat disediakan dari suatu unit kapasitor. Kapasitor tersebut dihubungkan paralel dengan terminal keluaran generator. Kapasitor yang terpasang harus mampu memberikan daya reaktif yang dibutuhkan untuk menghasilkan fluksi di celah udara. Karena generator dapat melakukan eksitasi sendiri maka generator tersebut dinamakan generator induksi penguatan sendiri. Mesin induksi yang beroperasi sebagai generator ini bekerja dengan slip yang lebih kecil dari nol ( s < 0 ).
Gambar 2.5. Prinsip kerja generator induksi penguatan sendiri
Pada mesin induksi tidak terdapat hubungan listrik antara stator dengan rotor, karena arus pada rotor merupakan arus induksi. Jika belitan stator diberi tegangan tiga phasa, maka pada stator akan dihasilkan arus tiga phasa, arus ini kemudian akan menghasilkan medan magnet yang berputar dengan kecepatan sinkron ( ns ) dan
kemudian akan melakukan pengisian muatan ke kapasitor ( C ) yang dipasang parallel dengan stator yang tujuannya untuk mensuplai tegangan ke stator nanti untuk mempertahankan kecepatan sinkron ( ns ) motor induksi pada saat dilakukan
pelepasan sumber tegangan tiga phasa pada stator.
Mesin dc sebagai prime mover yang dikopel dengan mesin induksi diputar secara perlahan memutar rotor mesin induksi hingga mencapai putaran sinkronnya ( nr = ns ). Saklar sumber tegangan tiga phasa untuk stator dilepas, dan kapasitor yang
hingga melewati kecepatan putaran sinkronnya mesin induksi ( nr > ns ), sehingga
slip yang timbul antara putaran rotor dan putaran medan magnet menghasilkan slip negatif ( s < 0 ) dan akan menghasilkan tegangan sehingga motor induksi akan berubah fungsi menjadi generator induksi.
Dari kurva karakteristik antara kecepatan dan kopel motor induksi di bawah ini dapat dilihat, jika sebuah motor induksi dikendalikan agar kecepatannya lebih besar daripada kecepatan sinkron oleh penggerak mula, maka arah kopel yang terinduksi akan terbalik dan akan beroperasi sebagai generator. Semakin besar kopel pada penggerak mula, maka akan memperbesar pula daya listrik yang dihasilkan. Pada gambar karakteristik diatas generator mulai menghasilkan tegangan pada saat putaran rotor ( nr ) sedikit lebih cepat dari putaran sinkron (ns) mesin induksi
tersebut.
Gambar 2.6. Karakteristik torsi – kecepatan mesin induksi
BAB III
MOTOR INDUKSI TIGA FASA
Motor induk si adalah motor listrik arus bolak-balik (ac) yang putaran rotornya tidak sama dengan putaran medan stator, dengan kata lain putaran rotor dengan putaran medan pada stator terdapat selisih putaran yang disebut slip.
Motor induksi, merupakan motor yang memiliki konstruksi yang baik, harganya lebih murah dan mudah dalam pengaturan kecepatannya, stabil ketika berbeban dan mempunyai efisiensi tinggi. Mesin induksi adalah mesin ac yang paling banyak digunakan dalam industri dengan skala besar maupun kecil, dan dalam rumah tangga. Alasannya adalah bahwa karakteristiknya hampir sesusai dengan kebutuhan dunia industri, pada umumnya dalam kaitannya dengan harga, kesempurnaan, pemeliharaan, dan kestabilan kecepatan. Mesin induksi (asinkron) ini pada umumnya hanya memiliki satu suplai tenaga yang mengeksitasi belitan stator. Belitan rotornya tidak terhubung langsung dengan sumber tenaga listrik, melainkan belitan ini dieksitasi oleh induksi dari perubahan medan magnetik yang disebabkan oleh arus pada belitan stator.
Hampir semua motor ac yang digunakan adalah motor induksi, terutama motor induksi tiga fasa yang paling banyak dipakai di perindustrian. Motor induksi tiga fasa sangat banyak dipakai sebagai penggerak di perindustrian karena banyak memiliki keuntungan, tetapi ada juga kelemahannya.
Keuntungan motor induksi tiga fasa adalah:
1. motor induksi tiga fasa sangat sederhana dan kuat. 2. biayanya murah dan dapat diandalkan.
4. perawatannya mudah. Dan kerugiannya adalah:
2. kecepatannya tidak bisa bervariasi tanpa merubah efisiensi. 3. kecepatannya tergantung beban.
4. pada torsi start memiliki kekurangan.
III.2. Konstruksi Motor Induksi Tiga Fasa
Motor induksi adalah motor ac yang paling banyak dipergunakan, karena konstruksinya yang kuat dan karakteristik kerjanya yang baik. Secara umum motor induksi terdiri dari rotor dan stator. Rotor merupakan bagian yang bergerak, sedangkan stator bagian yang diam. Diantara stator dengan rotor ada celah udara yang jaraknya sangat kecil. Konstruksi motor induksi dapat diperlihatkan pada gambar 2.1.
tipis. Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2.(c)). Berikut ini contoh lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang luar untuk motor induksi tiga phasa.Hal ini dapat kita lihat pada gambar 2.2
Untuk rotor akan dibahas pada bagian berikutnya, yaitu jenis – jenis motor induksi tiga fasa berdasarkan jenis rotornya.
III.3. Jenis Motor Induksi Tiga Fasa
Ada dua jenis motor induksi tiga fasa berdasarkan rotornya yaitu:
1. motor induksi tiga fasa sangkar tupai ( squirrel-cage motor) 2. motor induksi tiga fasa rotor belitan ( wound-rotor motor )
Kedua motor ini bekerja pada prinsip yang sama dan mempunyai konstruksi stator yang sama tetapi berbeda dalam konstruksi rotor.
III.3.1 Motor Induksi Tiga Fasa Sangkar Tupai ( Squirrel-cage Motor)
Penampang motor sangkar tupai memiliki konstruksi yang sederhana. Inti stator pada motor sangkar tupai tiga fasa terbuat dari lapisan – lapisan pelat baja beralur yang didukung dalam rangka stator yang terbuat dari besi tuang atau pelat baja yang dipabrikasi. Lilitan – lilitan kumparan stator diletakkan dalam alur stator yang terpisah 120 derajat listrik. Lilitan fasa ini dapat tersambung dalam hubungan
Rotor jenis rotor sangkar ditunjukkan pada Gambar 2.3.
Batang rotor dan cincin ujung motor sangkar tupai yang lebih kecil adalah coran tembaga atau aluminium dalam satu lempeng pada inti rotor. Dalam motor yang lebih besar, batang rotor tidak dicor melainkan dibenamkan ke dalam alur rotor dan kemudian dilas dengan kuat ke cincin ujung. Batang rotor motor sangkar tupai tidak selalu ditempatkan paralel terhadap poros motor tetapi kerapkali dimiringkan. Hal ini akan menghasilkan torsi yang lebih seragam dan juga mengurangi derau dengung magnetik sewaktu motor sedang berputar.
Pada ujung cincin penutup dilekatkan sirip yang berfungsi sebagai pendingin. Rotor jenis rotor sangkar standar tidak terisolasi, karena batangan membawa arus yang besar pada tegangan rendah. Motor induksi dengan rotor sangkar ditunjukkan pada Gambar 3.1.
Gambar 3.1 (a) Konstruksi Motor Induksi Rotor Sangkar Ukuran Kecil,
Gambar 3.2 (b) Konstruksi Motor Induksi Rotor Sangkar Ukuran Besar
[image:30.595.152.513.474.662.2]
III.3.2 Motor Induksi Tiga Fasa Rotor Belitan ( wound-rotor motor )
Motor rotor belitan ( motor cincin slip ) berbeda dengan motor sangkar tupai dalam hal konstruksi rotornya. Seperti namanya, rotor dililit dengan lilitan terisolasi
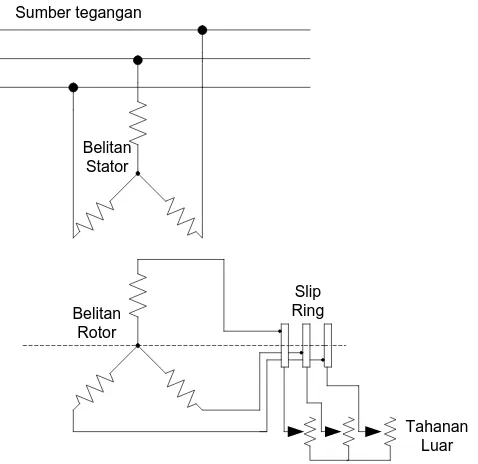
serupa dengan lilitan stator. Lilitan fasa rotor dihubungkan secara Υ dan masing – masing fasa ujung terbuka yang dikeluarkan ke cincin slip yang terpasang pada poros rotor. Secara skematik dapat dilihat pada gambar-3.7. Dari gambar ini dapat dilihat bahwa cincin slip dan sikat semata – mata merupakan penghubung tahanan kendali variabel luar ke dalam rangkaian rotor.
Gambar 3.3 (a) Rotor Belitan,
(b) Konstruksi Motor Induksi Tiga Phasa dengan Rotor Belitan
III.4. Prinsip Kerja Motor Induksi Tiga Fasa
Bila sumber tegangan listrik tiga fasa yang seimbang, dihubungkan ke terminal belitan stator dari suatu motor induksi tiga fasa maka pada masing-masing belitan akan mengalir arus listrik yang sinusoidal yang besarnya dapat dituliskan sebagai berikut :
t I
I= m.sinω ... (3.1)
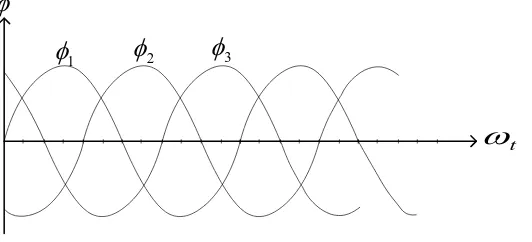
Arus pada masing-masing belitan stator akan menghasilkan fluksi (medan magnet) yang juga berbentuk sinusoidal sehingga dapat dituliskan sebagai berikut :
t
m ω
φ
φ = .sin ...(3.2)
Dimana bentuk gelombang fluksi tiga fasa yang sama dan seimbang tersebut dapat digambarkan sebagai berikut :
φ
1
φ
φ
2φ
3t
[image:33.595.155.421.122.243.2]ω
Gambar 3.4... Fluksi tiga fasa
Untuk sistem tiga fasa yang seimbang, maka persamaan masing-masing fluksi adalah:
t Sin
m ω
φ
φ1 = . ...(3.3)
) 120 (
. 2
o m Sin t−
=φ ω
φ ...(3.4)
) 240 (
. 3
o m Sin t−
=φ ω
φ ...(3.5)
α
2
φ
− φ3
ro
φ
φ
1
φ
φ
2φ
3t
ω
0
[image:34.595.198.469.123.255.2]α
α
1α
2α
3α
4α
5α
6Gambar 3.5... Analisis Resultan Fluksi
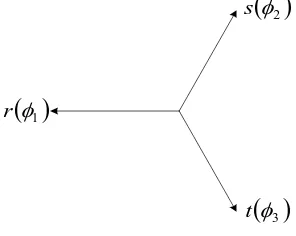
( )
φ1r
( )
φ2s
( )
φ3t
Gambar 3.6 Sudut Vektoris Tiga Fasa
∗ Untuk keadaan o
o =0
α , maka : o
m.Sin 0
1 φ
φ = = 0
) 120 ( . 2 o mSin − =φ
φ = 3φm
2 1 − ) 240 ( . 3 o mSin − =φ
φ = 3φm
2 1 α φ φ φ φ
φro = 22 + 32 +2 2. 3 Cos
[image:34.595.263.411.322.440.2]α
1φ
2φ
−
1 rφ
α
2 rφ −φ3
1
φ
∗ Untuk keadaan α1 =60o, maka : φ1 =φm.Sin 60o = 3 φm 2 1 ) 60 ( . 2 o mSin − =φ
φ = 3φm
2 1 − ) 180 ( . 3 o mSin − =φ
φ = 0
α φ
φ φ φ
φr1 = 12 + 22 +2 1. 2 Cos
m φ 5 , 1 =
∗ Untuk keadaan α2 =120o, maka : o m.Sin 120
1 φ
φ = = 3φm
2 1
o m.Sin 0
2 φ
φ = = 0
) 120 ( . 3 o m Sin − =φ
φ = 3φm
2 1 − α φ φ φ φ
φr2 = 12 + 32 +2 1. 3 Cos
m φ 5 , 1 =
Untuk semua keadaan α, besar fluks resultan adalah konstan dengan nilai
m
φ 5 ,
1 dan berputar searah arah jarum jam pada setiap pertambahan sudut sebesar o
60 atau o
180 dari keadaan awal.
dan tahanan rotor itu sendiri. Arus listrik yang mengalir pada kumparan-kumparan rotor motor induksi tiga fasa ini akan menimbulkan gaya listrik. Adapun besarnya gaya listrik ini adalah :
L I B
F = . r. ... (3.6)
Di mana : F = Gaya listrik (Newton)
B = Kerapatan fluks (Weber/m2)
I = Arus rotor (ampere) r
L = Panjang belitan rotor (meter)
Sumber tegangan
Belitan Stator
Belitan Rotor
Slip Ring
[image:37.595.235.474.115.347.2]Tahanan Luar Gambar-3.7 Rangkaian stator dan rotor belitan
Bila jari-jari kumparan rotor adalah r, maka besarnya momen putar adalah :
r F
Tr = . ... (3.7)
Di mana : T = Momen Putar (N.m) r
r = Jari-jari kumparan rotor (meter)
putar rotor
( )
n . Perbedaan kecepatan ini biasanya disebut dengan slip. Adapun r besarnya slip motor induksi adalah :Slip (s) = − ×100% s
r s
n n n
……….(3.8)
dimana: nr = kecepatan rotor
persamaan (3.8) di atas memberikan imformasi yaitu:
1. saat s = 1 dimana n = 0, ini berati rotor masih dalam keadaan diam atau akan r berputar.
2. s = 0 menyatakan bahwa n = s n , ini berarti rotor berputar sampai kecepatan r sinkron. Hal ini dapat terjadi jika ada arus dc yang diinjeksikan ke belitan rotor, atau rotor digerakkan secara mekanik.
3. 0 < s < 1, ini berarti kecepatan rotor diantara keadaan diam dengan kecepatan sinkron. Kecepatan rotor dalam keadaan inilah dikatakan kecepatan tidak sinkron. Biasanya slip untuk mendapatkan efisiensi yang tinggi pada saat beban penuh adalah 0,04.
Oleh karena perbedaan kecepatan medan putar stator
( )
n dengan s kecepatan momen putar rotor( )
n merupakan syarat agar rotor dapat berputar maka r slip ini akan mempengaruhi frekuensi rotor dan tegangan induksi pada kumparan rotor. Adapun besar frekuensi rotor adalah :(
)
120
. s r
r
n n P
f = −
(
)
s r s s
n n n n
P −
= . 120
s f
fr = s. (Hz) ... (3.9)
Adapun besarnya tegangan induksi pada saat kumparan rotor sedang berputar adalah:
m r r
rs f N
E =4,44. . .φ
m r s s N f . . .φ .
44 , 4 =
s E
Ers = r. (Volt) ... (3.10)
Adapun besar reaktansi rotor pada saat start adalah :
r r
rs f L
X =2.π. .
s X
Xrs =2. r. ( Ω ) ... (3.11)
III.5. Medan Putar
Gambar 3.8. Medan Putar Pada Motor 3 Fasa
III.5.1 Analisa Medan Putar secara Vektor dan Perhitungan
Perputaran motor pada mesin arus bolak – balik ditimbulkan oleh adanya medan putar ( fluks yang berputar ) yang dihasilkan dalam kumparan stator. Medan putar ini terjadi apabila kumparan stator dihubungkan dalam fasa banyak, pada
umumnya tiga fasa. Hubungan belitan pada stator dapat berupa hubungan Y atau Δ.
untuk mempermudah memahami medan putar , maka dapat dilihat gambar ( 3.7 ) berikut yang menggambarkan keadaan pada kumparan yang dialiri oleh arus dari sumber tiga fasa. Misalkan arus yang mengalir pada ketiga kumparan tersebut sebesar:
t I
t
) 120 sin(
) (
' t =I t− °
ibb M ω (Ampere)………….(3.12.b)
) 240 sin(
) (
' t =I t− °
icc M ω (Ampere)………….(3.12.c)
Arus yang ada pada kumparan aa' mengalir dari a dan keluar menuju ke
'
a . Karena arus yang mengalir pada kumparan aa'ini, maka dihasilkan kerapatan medan magnet ( H ) pada kumparan '
aa sebesar °
∠
= sin 0
) (
' t H t
Haa M ω (Amp turns/m)…….(3.13.a)
Dan kerapatan medan magnet pada kumparan '
bb dan '
cc sebesar: °
∠ ° −
= sin( 120 ) 120 )
(
' t H t
Hbb M ω Amp.turns/m…………(3. 13.b)
° ∠ ° −
= sin( 240 ) 240 )
(
' t H t
Hcc M ω Amp.turns/m…………(3. 13.c)
Telah diketahui bahwa kerapatan fluks ( B ) dapat dihitung dari intensitas medan magnet ( H ), yaitu
B = µH Tesla (T)………...(3.14)
Maka didapat kerapatan fluks pada masing – masing kumparan, yaitu °
∠
= sin 0
) (
' t B t
Baa M ω Tesla………..(3.15.a)
° ∠ ° −
= sin( 120 ) 120 )
(
' t B t
Bbb M ω Tesla………..(3.15.b)
° ∠ ° −
= sin( 240 ) 240 )
(
' t B t
Pada persamaan kerapatan fluks diatas , dimana BM =µHM. kerapatan fluks dapat dihitung resultannya dengan menentukan nilai dari waktu (t), sehingga resultan kerapatan fluks ada nilainya, misalnya pada saat ωt= 0, maka kerapatan fluks pada masing – masing kumparan stator sebesar:
0 ' = aa B ° ∠ ° −
= sin( 120 ) 120
' M bb B B ° ∠ −
= sin( 240) 240
' M
cc B
B
Resultan kerapatan fluks pada stator sebesar
' '
' bb cc
aa
net B B B
B = + +
= + − ∠ °+ )∠240° 2 3 ( 120 ) 2 3 (
0 BM BM
= 1,5BM∠−90° Tesla
Jika ωt =90° , maka: ° ∠ = 0 ' M aa B B ° ∠ −
= 0,5 120
' M bb B B ° ∠ −
= 0,5 240
' M
cc B
B
' '
' bb cc
aa
net B B B
° ∠ −
+ ° ∠ −
+ ° ∠
= M 0 ( 0,5 M) 120 ( 0,5 M) 240
net B B B
B
= 1,5BM∠0° Tesla
Dari perhitungan saat ωt= 0 dan saat ωt =90° dihasilkan resultan medan magnet yang sama besar amplitudonya, hanya berbeda sudutnya. Seperti yang ditunjukkan oleh gambar 3.8 dan gambar 3.9, terlihat jelas bahwa medan magnet yang dihasilkan ini berputar tergantung terhadap waktu ( t ).
Pada analisa medan putar secara vektoris, diketahui bahwa pada harga waktu (t) berapapun nilainya maka didapat magnitudo dari resultan medan magnet sebesar 1,5B . Dan ini akan terus konstan dan berputar dengan kecepatan sudut M ω.
Dalam sistem koordinat , dimana garis horizontal positif disimbolkan dengan x dan garis vertikal keatas disimbolkan dengan y. a disimbolkan sebagai vektor x satuan dari garis horizontal dan ay sebagai vektor satuan dari garis vertikal. Untuk mendapatkan persamaan umum dari resultan fluks magnetik ( Bnet ) maka dijumlahkan kerapatan fluks magnetik yang dihasilkan pada masing – masing kumparan stator secara vektoris.
Resultan fluks magnet pada stator dinyatakan dengan persamaan:
) ( )
( )
( )
(t B ' t B ' t B ' t
Bnet = aa + bb + cc ( Tesla )
=
° ∠ ° − +
° ∠ ° − +
°
∠0 sin( 120 ) 120 sin( 240 ) 240
sin t B t B t
= BM sinωt(cos0+ jsin0)+BMsin(ωt−120)(cos120+ jsin120)+
BM sin(ωt−240)(cos240+ jsin240)
= + − − + )+ 2 3 5 , 0 )( 120 sin( ) 1 (
sin t B t j
BM ω M ω
) 2 3 5 , 0 )( 240
sin( t j
BM ω − − −
Dengan menganggap konponen ril berada pada sumbu x dan komponen khayal pada sumbu y, maka Persamaan diatas dapat dinyatakan dalam komponen ax dan ay.
=
) (t
Bnet BMsinωt ax −[0,5BM sin(ωt−120°)]a + x BM t ay
° −120 ) sin(
2 3
ω
x
M t a
B sin( 240 )]
5 , 0
[ − °
− ω BM t ay
− °
− sin( 240 ) 2
3
ω ( Tesla )
Komponen – komponen vektor x dan y dapat disatukan menjadi sebagai berikut ini:
[
M M M]
xnet B t B t B t a
B = sinω −0,5 sin(ω −120°)−0,5 sin(ω −240°)
+ BM t BM t ay
° − − °
− sin( 240 ) 2 3 ) 120 sin( 2 3 ω ω
Karena ωt ωt cosωt
2 3 sin 5 , 0 ) 120
ωt ωt cosωt 2 3 sin 5 , 0 ) 240
sin( − ° =− +
Maka didapat :
x M
M M
net B t B t t B t t a
B − − − − − +
= ω ω ω ω cosω
2 3 sin 5 , 0 ( 5 , 0 ) cos 2 3 sin 5 , 0 ( 5 , 0 sin + y M
M t t B t t a
B − − − − + ) cos 2 3 sin 5 , 0 ( 2 3 ) cos 2 3 sin 5 , 0 ( 2 3 ω ω ω ω x M M M M M
net B t B t B t B t B t a
B − + + +
= ω ω ω ω cosω
4 3 sin 4 1 cos 4 3 sin 4 1 sin + y M M M
M t B t B t B t a
B − + −
− ω ω ω cosω
4 3 sin 4 3 cos 4 3 sin 4 3 y M x M
net B t a B t a
B =(1,5 sinω ) −(1,5 cosω ) ( Tesla )……….( 3.16 )
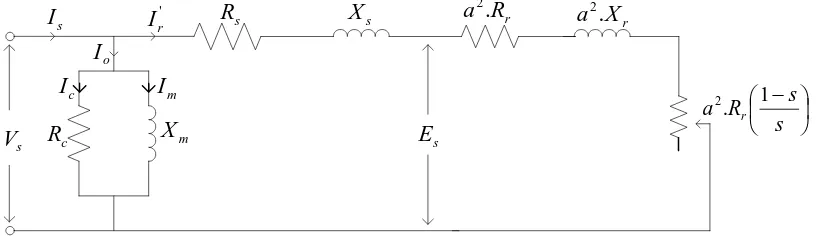
III.6. Rangkaian Ekivalen Motor Induksi
Pada prinsipnya proses “induksi” yang terjadi pada motor induksi hampir sama seperti pada transformator yang berbeban resistif, sehingga penggambaran rangkaian ekivalen motor induksi berdasarkan rangkaian ekivalen transformator, dimana stator identik dengan sisi primer transformator dan rotor identik dengan sisi sekunder transformator. Perbedaannya, pada kumparan rotor (sekunder) motor induksi terhubung singkat dan berputar. Disamping itu perbedaan yang mendasar antara keduanya adalah transformator merupakan mesin listrik statis, sedangkan motor induksi adalah mesin listrik dinamis.
Rangkaian ekivalen motor induksi untuk masing-masing sisi dapat diperlihatkan seperti berikut ini :
III.6.1 Ditinjau Dari Sisi Rotor
Pada saat motor induksi bergerak n > 0 dan r n < r n , maka berdasarkan s persamaan (3.14) akan terjadi slip (s).
Jika kumparan rotor dihubungkan dengan suatu beban, maka pada kumparan rotor akan mengalir arus I yang sumbernya r E . r
(
r r)
r
r I R X
E = . + ... (3.17)
Apabila harga-harga ggl induksi dilihat dari rotor, maka :
a E
E s
s V r X s. r R rs E s E r I s R s X m X s I ' r I o I c I m I c R
Di mana :
' r r r s I I E E
a= = ... (3.19)
a : adalah konstanta perbandingan.
Berdasarkan persamaan (3.17) didapat ggl induksi pada bagian rotor yaitu:
r r r r
r I R I X E = . + .
r r r r
r sI R sI X E
s. = . . + . .
r r r r
rs sI R sI X
E = . . + . . ... (3.20)
Karena frekuensi rotor maupun frekuensi stator tidak mempengaruhi resistansi rotor, sehingga persamaan (3.20) menjadi :
r r r r
rs I R sI X
E = . + . . ... (3.21)
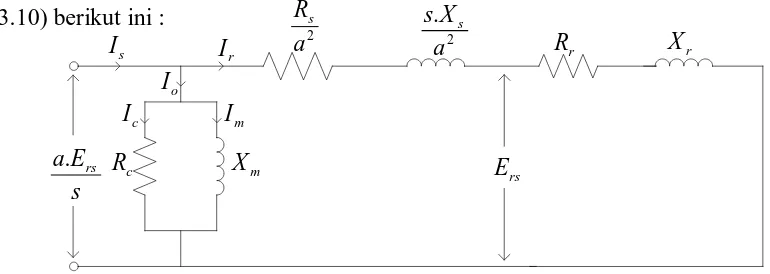
[image:47.595.129.503.553.678.2]Rangkaian ekivalen pada persamaan (3.21) ditunjukkan pada gambar (3.12) berikut ini:
r X r R 2 . a X s s 2 a Rs r I s I o I m I m X c R c I rs E s E a. rs
Bila persamaan (3.19) disubsitusikan ke persamaan (33.20) maka diperoleh :
r s r s rs I a X s I a R s
E = .2 . + . 2 . ... (3.22)
Mengingat bahwa frekuensi rotor maupun frekuensi stator tidak mempengaruhi resistansi stator (fr = fs.s), maka persamaan (3.23) menjadi :
r s r s rs I a X s I a R
E = 2 . + . 2 . ... (3.23)
Dari persamaan (3.24) didapat :
(
s s)
rs r X js R E a I . . 2 +
= ... (3.24)
r r X R
Cosϕ = ... (3.25)
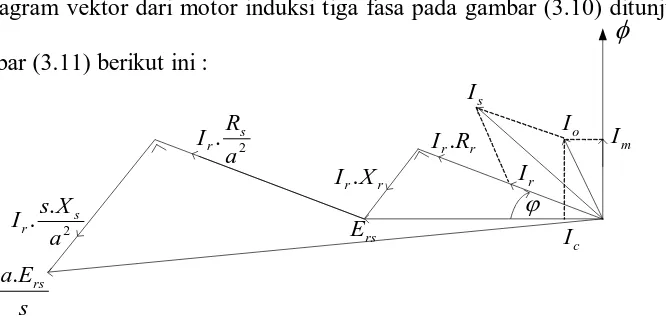
[image:48.595.119.504.514.651.2]Dari persamaan (3.23) rangkaian ekivalen motor ditunjukkan pada gambar (3.10) berikut ini :
φ
m I o I c I s I ϕ r r R I . r I r r X I . 2 . a R I s r rs E 2 . . a X s I s r s E a. rs [image:49.595.162.495.117.281.2]Diagram vektor dari motor induksi tiga fasa pada gambar (3.10) ditunjukkan pada gambar (3.11) berikut ini :
Gambar 3.11 Diagram Vektor Pada Saat Motor Berputar Dilihat dari Rotor
III.6.2 Ditinjau Dari Sisi Stator
Dengan mensubsitusi persamaan (3.20) pada persamaan (3.21) maka didapat :
r r r
r
s a I X
s R I a
E . . . 2. '.
'
2 +
= ... (3.26)
φ
sI
oI
' r I s R I a2. r'. rr r X I a2. '.
m
I
s E s r XI .'
s rR I .'
ϕ
c I s V s E r X a .2 sR a2. r
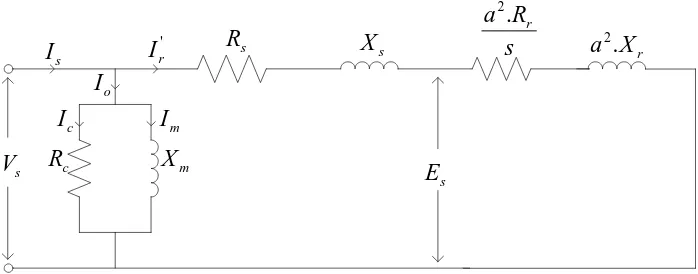
[image:50.595.163.512.118.255.2]s X s R ' r I o I m I m X c R c I s I s V
Gambar 3.12 Rangkaian Ekivalen Pada Saat Motor Bergerak Dilihat Dari Stator
Diagram vektor dari motor induksi tiga fasa pada gambar (3.12) ditunjukkan pada gambar (3.13) berikut ini :
Gambar 3.13Diagram vektor Pada Saat Motor Berputar Dilihat Dari Stator
Nilai
s Rr
dapat dijabarkan menjadi :
[image:50.595.168.476.385.539.2]r r r r R s R R s R − + = − + = s s R R s R r r r 1
... (3.27)
Bila persamaan (3.27) disubsitusikan ke persamaan (3.26), maka didapat rangkaian ekivalen motor induksi menjadi :
s
E
r
X a .2
r
R a .2
[image:51.595.151.559.298.416.2]s X s R ' r I s I o I m I c I m X c R s V − s s R a2. r 1
Gambar 3.14 Rangkaian Pengganti Pada Saat Motor Berputar Dilihat Dari Stator
Dari persamaan 3.26 didapat nilai :
+ = r r s r jX s R a E I . 2 '
... (3.28)
r r r jX s R s R + = ϕ
III.7. Aliran Daya dan Arus Motor Induksi Tiga Fasa
Motor induksi tidak dapat berputar pada kecepatan sinkron. Seandainya hal ini terjadi, maka rotor akan tetap diam relatif terhadap fluksi yang berputar. Maka tidak akan ada ggl yang diinduksikan dalam rotor, tidak ada arus yang mengalir pada rotor, dan karenanya tidak akan menghasilkan kopel. Kecepatan rotor sekalipun tanpa beban, harus lebih kecil sedikit dari kecepatan sinkron agar adanya tegangan induksi pada rotor, dan akan menghasilkan arus di rotor, arus induksi ini akan berinteraksi dengan fluks listrik sehingga menghasilkan kopel. Selisih antara kecepatan rotor dengan kecepatan sinkron disebut slip (s). Slip dapat dinyatakan dalam putaran setiap menit, tetapi lebih umum dinyatakan sebagai persen dari kecepatan sinkron.
Telah kita ketahui bersama, bahwa arus start motor induksi 3 fasa lebih besar 5 sampai 7 kali arus nominalnya. Untuk membuktikan arus start tersebut, dapat kita lihat pada rangkaian ekivalen berikut :
s
E
r
X a .2
r
R a .2
s
X
s
R '
r
I
s
I
o
I
m
I
c
I
m
X
c
R
s
V
−
s s R a2. r 1
Dengan memperhatikan model rangkaian diketahui bahwa daya masuk stator untuk motor induksi tiga fasa adalah :
ϕ cos . . . 3 s s s V I
P = ... (3.30)
Dimana : Vs =tegangan sumber
( )
voltIs =arus masukan
(
ampere)
ϕ= perbedaan sudut fasa antara arus masukan dan tegangan sumber
Daya masuk rotor (terdapat pada celah udara) :
ϕ
cos . . . 3 s r'
r E I
P = ... (3.31)
Bila persamaan (3.29) dan persamaan (3.30) disubsitusikan ke persamaan (3.32), maka besar daya input rotor pada motor induksi tiga fasa adalah :
( ) (
2 2 2)
2 2 2 ) ( . . . . . . 3 s X a R a s R a E P r r r s in r += ... (3.32)
Sebelum daya ditransfer melewati celah udara, motor induksi mengalami rugi-rugi berupa rugi-rugi tembaga stator (Pts =3.Is2.Rs) dan rugi-rugi inti stator
(
Pis 3.Es /Rc)
2
= . Daya yang ditransfer melalui celah udara
(
3.Pcu)
sama dengan penjumlahan rugi-rugi tembaga rotor( )
3.Ptr dan daya mekanik( )
3.Pd . Daya yang ditransfer melalui celah udara ini sering disebut dengan daya input rotor.d tr
cu P P
P 3. 3. .
3 = +
( )
( )
( )
RsI R s s I R I
Pcu 3. r' 2. r 3 r' . 1 r 3. r' 2 r .
3 =
− +
Untuk lebih jelasnya dapat dilihat pada gambar (3.16) yang menggambarkan diagram aliran daya motor induk si tiga fasa.
θ
cos . . . 3VsIs
Rugi – rugi tembaga stator s s R I . . 3 2
Rugi – rugi Inti stator c s R E / . 3 2
( )
I R s Pcu 3. r . / .3 = ' 2 2'
Rugi – rugi tembaga rotor
( )
' 2 '. . 3 Ir Rr
Konversi daya
Daya Mekanik
( )
' 2( )
1 '.
3 r Rr s
s
I −
Rugi – rugi gesek dan angin g a P& s P s s
T.ω
Gambar 3.16 Diagram Aliran Daya Pada Motor Induksi Tiga Fasa
Hubungan antara rugi-rugi tembaga rotor dan daya mekanik dengan daya masukan rotor, masing-masing dalam besaran dapat ditulis sebagai berikut :
( )
r r cu tr I R sP P =3. ' 2. = .... (3.34)
( )
r r( )
cud s P
s s R I
P ' 2. 1 = 1− .
−
= ... (3.35)
Dari gambar (3.16) dapat dilihat bahwa motor induksi juga mengalami rugi-rugi gesek dan angin
( )
Pa&g sehingga daya output mekanik yang merupakan daya pengerak poros( )
n sama dengan daya mekanik total( )
3.Pd dikurangi rugi-rugi gesek dan angin( )
Pa&g .m s g a d
o P P T
P =3. − & = ω ... (3.36)
ωm = kecepatan sudut poros
(
rad /s)
Effisiensi suatu motor induksi dapat dinyatakan dengan persamaan berikut;
%
100
%
100
x
P
P
P
x
P
P
i rugi i
i
o
=
−
Σ
=
η
... (3.37)b g a tr is ts
rugi P P P P P
P = + + + +
Σ & ... (3.38)
ϕ
cos . . . 3 s s i V I
P = ... (3.39)
dimana : η =effisiensi
Po = daya keluaran (watt)
Pi = daya masukan (watt)
=
ΣPrugi rugi-rugi total motor (watt)
Pts = rugi tembaga stator (watt)
Pis = rugi inti stator (watt)
Ptr = rugi tembaga rotor (watt)
= g a
P& rugi gesek dan angin (watt)
III.8. Frekuensi Rotor
Ketika rotor masih dalam keadaan diam, dimana frekuensi arus pada rotor sama seperti frekuensi masukan ( sumber ). Tetapi ketika rotor akan berputar, maka frekuensi rotor akan bergantung kepada kecepatan relatif atau bergantung terhadap besarnya slip. Untuk besar slip tertentu, maka frekuensi rotor sebesar '
f yaitu,
r s n n − =
P f' 120
, diketahui bahwa ns= p
f 120
Dengan membagikan dengan salah satu, maka didapatkan :
s n
n n f f
s r s − =
=
'
Maka f = ' sf ( Hz )……….(3.40)
Telah diketahui bahwa arus rotor bergantung terhadap frekuensi rotor f = '
sf dan ketika arus ini mengalir pada masing – masing phasa di belitan rotor, akan memberikan reaksi medan magnet. Biasanya medan magnet pada rotor akan menghasilkan medan magnet yang berputar yang besarnya bergantung atau relatif terhadap putaran rotor sebesarsn . s
medan magnetik yang berputar secara sinkron. kenyataannya tidak seperti ini karena pada stator akan ada arus magnetisasi pada kumparannya.
III.9. Efisiensi
Efisiensi motor induksi adalah ukuran keefektifan motor induksi untuk mengubah energi listrik menjadi energi mekanis yang dinyatakan sebagai perbandingan antara masukan dan keluaran atau dalam bentuk energi listrik berupa perbandingan watt keluaran dan watt masukan. Defenisi NEMA terhadap efisiensi energi adalah bahwa efisiensi merupakan perbandingan atau rasio dari daya keluaran yang berguna terhadap daya input total dan biasanya dinyatakan dalam persen Juga sering dinyatakan dengan perbandingan antara keluaran dengan keluaran ditambah rugi-rugi, yang dirumuskan dalam persamaan (3.41)
Loss out
out
in loss in
in out
P P
P P
P P P P
+ =
− = =
η ×100% ...(3.41)
Dari persamaan terlihat bahwa efisiensi motor bergantung pada besar rugi-ruginya. Rugi-rugi pada persamaan tersebut adalah penjumlahan keseluruhan komponen rugi-rugi yang dibahas di atas.
Pada motor induksi pengukuran efisiensi motor induksi ini sering dilakukan dengan beberapa cara seperti:
- Mengukur setiap komponen rugi-rugi dan daya masukan,
Dimana pengukuran daya masukan tetap dibutuhkan pada ketiga cara di atas. Umumnya, daya elektris dapat diukur dengan sangat tepat, keberadaan daya mekanis yang lebih sulit untuk diukur. Saat ini sudah dimungkinkan untuk mengukur torsi dan kecepatan dengan cukup akurat yang bertujuan untuk mengetahui harga efisiensi yang tepat. Pengukuran pada keseluruhan rugi-rugi ada yang berdasarkan teknik kalorimetri. Walaupun pengukuran dengan metode ini relatif sulit dilakukan, keakuratan yang dihasilkan dapat dibandingkan dengan hasil yang didapat dengan pengukuran langsung pada daya keluarannya.
Kebanyakan dari pabrikan lebih memilih melakukan pengukuran komponen rugi-rugi secara individual, karena dalam teorinya metode ini tidak memerlukan pembebanan pada motor, dan ini adalah suatu keuntungan bagi pabrikan. Keuntungan lainnya yang sering disebut-sebut adalah bahwa memang benar error pada komponen rugi-rugi secara individual tidak begitu mempengaruhi keseluruhan efisiensi. Keuntungannya terutama adalah fakta bahwa ada kemungkinan koreksi untuk temperatur lingkungan yang berbeda. Biasanya data efisiensi yang disediakan oleh pembuat diukur atau dihitung berdasarkan standar tertentu.
III.10. Pengaruh Perubahan Tegangan Terhadap Efisiensi
antara perubahan tegangan dengan efisiensi motor tersebut. Hal itu terlihat dari prinsip kerja motor induksi tersebut,yang diuraikan sebagai berikut :
Keterangan :
: Diberikan kepada
: Menghasilkan
Dari uraian di atas dapat kita lihat bahwa tegangan tersebut mempengaruhi bagaimana proses pembentukan slip.
Dan jika terjadi perubahan tegangan pada sumber maka akan terjadi perubahan di semua tahap (alur) proses prinsip kerja tersebut. Dan kepada efisiensi motor,hal ini mempengaruhi pada rugi – rugi yang dialami oleh motor tersebut,seperti rugi – rugi pada stator :
• Rugi tembaga stator (I12xR1) dan rugi inti stator
• Rugi – rugi lainnya.
Dan rugi – rugi pada rotor yaitu :
Tegangan Stator Arus (I1) Fluksi (Φ) GGL rotor (E2)
Arus(I2)
Fl( gaya) Torsi(T)
Putaran rotor (nr)
• Rugi tembaga rotor (I22xR2) dan rugi inti rotor
• Rugi gesek dan angin • Dan rugi – rugi lainnya.
Berdasarkan persamaan – persamaan dalam mencari efisiensi di atas, dapat kita lihat dari persamaan 3.37 sampai persamaan 3.39 terlihat bahwa perubahan tegangan dari sumber sangat mempengaruhi besar daya keluaran motor yang berupa putaran (nr) dan juga dipengaruhi besar torsi beban. Dan perubahan tegangan ini juga berpengaruh terhadap arus dalam motor. Sehingga perubahan tegangan ini sangat menentukan dalam daya keluaran motor yang berupa putaran dan rugi – rugi.
BAB IV
PENGARUH PERUBAHAN TEGANGAN TERHADAP
EFISIENSI PADA MOTOR INDUKSI 3 FASA
IV.1. Umum
Untuk melihat pengaruh perubahan tegangan masukan terhadap efisiensi motor induksi tiga fasa rotor belitan dapat dilihat dari data hasil percobaan yang diperoleh. Dari hasil pengujian juga diperoleh hubungan antara torsi dan kecepatan putar rotor untuk berbagai tegangan terminal motor.
Untuk mendapatkan parameter-parameter pada motor induksi rotor belitan tiga fasa dilakukan percobaan-percobaan, antara lain :
• Percobaan beban nol.
• Percobaan Perbandingan belitan. • Percobaan hubung singkat. • Percobaan pengukuran Tahanan
IV.1.1.Peralatan Percobaan
Penelitian tentang perhitungan efisiensi motor induksi tiga fasa dengan pengaturan tegangan dilakukan pada Laboratorium Konversi Energi Listrik FT USU. Adapun peralatan-peralatan yang digunakan pada penelitian ini adalah sebagai berikut :
a. Motor Induksi 3 fasa Rotor Belitan dengan data-data sebagai berikut :
1. Tegangan nominal : Y/∆ 380/220 V 2. Arus nominal : Y/∆ 6,2/10,7 A
3. Cos ϕ : 0,67
4. Frekuensi : 50 Hz 5. Putaran nominal : 1410 rpm 6. Jumlah kutub : 4
7. Daya output : 2,2 KW 8. Produksi : AEG
b. 1 Unit Motor DC (berfungsi sebagai generator) sebagai beban dengan pengukur Torsi Beban
Adapun data-data pada motor DC adalah :
1. Tipe : GF 110/140
3. Tegangan Nominal : 220 volt
4. Arus Jangkar : 9,1 Ampere
5. Arus medan : 0,64 Ampere
6. Kecepatan Nominal : 1500 rpm
7. Daya output : 2,0 KW
c. 1 Unit Cosϕ meter
d. 1 Unit power supply AC 3ϕ (PTAC)
e. 2 Unit Power Supply DC (PTDC)
f. 1 Unit Voltmeter AC
g. 1 Unit Voltmeter DC
h. 1 Unit Ammeter AC
i. 2 Unit Ammeter DC
j. 1 Unit Wattmeter
k. 3 Unit Tahanan Geser.
IV.1.2.Rangkaian dan Prosedur Percobaan
C A T P
R
S
T
M
T
N
K LR S T
1
V
1
A
K L M
Induksi Motor
Wattmeter
1
S
Gambar 4.1 Rangkaian Percobaan Beban Nol Pengaruh Perubahan Tegangan
Prosedur Percobaan :
1. Rangkaian percobaan dibuat seperti gambar 4.1 2. Tutup saklar S1
3. Naikkan tegangan autotrafo AC (PTAC) yang disuplai ke motor induksi dengan besar tegangan mencapai 380 V
4. Mencatat arus beban nol
( )
Io ,putaran (rpm), tegangan input( )
V ,Faktor o daya dan daya input( )
Pin .5. Turunkan tegangan autotrafo AC (PTAC) hingga motor berhenti. 6. Lepaskan saklar S 1
7. Percobaan selesai.
K LRS T C
A T P R
S
T
T
N
G
1
PTDC
2
C D T P
1
S
1
V
1
A
Wattmeter
Induksi Motor
K L M
M
3
S S2
2
A
3
A
2
V
Gambar 4.2 Rangkaian Percobaan Hubung Singkat Pengaruh Perubahan Tegangan
Prosedur Percobaan :
1. Rangkaian percobaan dibuat seperti gambar 4.2 2. Tutup saklar S1
3. Naikkan tegangan autotrafo (PTAC) yang disuplai ke motor induksi sampai mencapai 78 volt.
4. Tutup S , naikkan PTDC 1 sampai arus medan mencapai 1 ampere 3
5. Tutup S2, naikka n PTDC 2 sampai motor DC memblok (memberhentikan) putaran motor induksi.
6. Mencatat tegangan hubung singkat
( )
Vhs , arus hubung singkat( )
Ihs , daya input( )
Pin , torsi( )
T dan arus jangkar motor dc( )
Ia .7. Turunkan PTDC 2 sampai nol lalu lepaskan S2. 8. Turunkan PTDC 1 sampai nol lalu lepaskan S . 3
10. Percobaan 3-9 diulang kembali dengan tegangan input 77 volt dan arus medan 1,38 ampere.
11. Percobaan selesai.
IV.1.2.3. Percobaan Pengukuran Tahanan Motor Induksi
1 C D T P
U
V W 1
V
1 A
1
S
Induksi Motor
Stator dari Ditinjau
Gambar 4.3a Ditinjau Dari Stator
Prosedur Percobaan :
1. Rangkaian percobaan dibuat seperti pada gambar 4.3a. 2. Sambungkan terminal stator U-W ke terminal PTDC 1. 3. Tutup saklar S . 1
4. Naikkan tegangan PTDC 1 yang disuplai ke motor induksi sampai mencapai 1 volt lalu mencatat tegangan DC
( )
V dan arus DC 1( )
A . 15. Lngkah ke- 4 diulang untuk tegangan 2 volt dan 3 volt. 6. Turunkan tegangan PTDC 1 sampai nol lalu lepaskan S . 1
7. Percobaan 2-6 diulang kembali dengan tegangan terminal stator U-V dan V-W.
2
C D T
P
K
L M
2
S
2
V
2
A Rotor dari Ditinjau
Induksi Motor
Gambar 4.3b Ditinjau Dari Rotor
Prosedur Percobaan :
1. Rangkaian percobaan dibuat seperti pada gambar 4.3b. 2. Sambungkan terminal stator K-L ke terminal PTDC 2. 3. Tutup saklar S . 2
4. Naikkan tegangan PTDC 2 yang disuplai ke motor induksi sampai mencapai 1 volt lalu mencatat tegangan dc (V2) dan arus DC
( )
A . 25. Langkah ke- 4 diulang untuk tegangan 2 volt dan 3 volt. 6. Turunkan PTDC 2 sampai nol lalu lepaskan S . 2
7. Percobaan 2-6 diulang kembali dengan terminal stator K-M dan L-M. 8. Percobaan selesai.
IV.1.2.4. Percobaan Pengukuran Perbandingan Belitan
1
s
M
W V U
C A T
P
1
V V2
K
L
M
Rotor Stator
Induksi Motor
Prosedur Percobaan :
1. Rangkaian percobaan dibuat seperti pada gambar 4.4a. 2. Terminal rotor K-L dihubungkan oleh voltmeter
( )
V . 2 3. Tutup saklar S . 14. Naikkan tegangan PTAC yang disuplai ke motor induksi sampai mencapai 20 volt lalu mencatat tegangan pada stator
( )
V dan rotor 1( )
V . 2 5. Langkah ke-4 diulang untuk tegangan 40, 60 dan 80 volt.6. Langkah 2-5 diulang untuk posisi terminal rotor K-M dan L-M. 7. Percobaan selesai.
1
s
M
W V U
C A T P K
L
M
Rotor Stator
Induksi Motor
2
V
1
V
Gambar 4.4b Percobaan Perbandingan Belitan Ditinjau Dari Rotor
Prosedur Percobaan :
1
A
1
V
Wattmeter
K LR ST
Induksi Motor M T N G 2 A 2 V 2 S 3 S 1 PTDC 2 C D T P 3 A Meter Cosϕ 1 s C A T P R S T
±1A 5A P2
1
P P3
K L M
4. Naikkan tegangan PTAC yang disuplai ke motor induksi samapai mencapai 4 volt lalu mencatat tegangan pada stator
( )
V dan rotor 1( )
V . 2 5. Langkah ke-4 diulang untuk tegangan 8, 12, dan 16 volt.6. Langkah 2-5 diulang untuk posisi terminal rotor U-W dan V-W. 7. Percobaan selesai.
Catatan :
1. Untuk percobaan pengukuran belitan ditinjau dari stator V1 =V dan V2 =E2.
2. Untuk percobaan pengukuran belitan ditinjau dari rotor V1 =E2' dan V2 =V'
Hal ini dipergunakan untuk membedakan voltmeter
( )
V pada stator dan 1 voltmeter( )
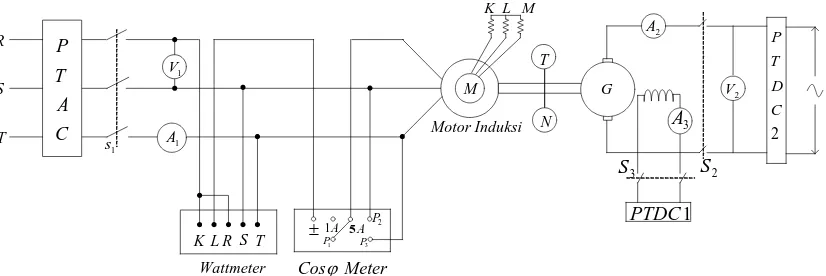
V pada rotor. 2IV.1.2.5. Percobaan Pengukuran Faktor Daya Motor Induksi dengan
[image:69.595.132.545.509.647.2]Perubahan Tegangan
Gambar 4.5 Rangkaian Percobaan Pengukuran Faktor Daya dengan Perubahan
Prosedur Percobaan :
1. Rangkaian percobaan dibuat seperti gambar 4.5 2. Tutup saklar S1
3. Naikkan tegangan autotrafo (PTAC) yang disuplai ke motor induksi sampai mencapai 360 Volt.
4. Mencatat arus motor, daya dan juga kecepatan motor
5. Turunkan tegangan dengan autotrafo (PTAC) hingga diperoleh harga faktor