ANALISIS KESTABILAN MODEL MANGSA-PEMANGSA
HUTCHINSON DENGAN WAKTU TUNDA DAN
PEMANENAN KONSTAN
LILIS SAODAH
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI SKRIPSI DAN
SUMBER INFORMASI SERTA PELIMPAHAN HAK CIPTA
Dengan ini saya menyatakan bahwa skripsi berjudul Analisis Kestabilan Model Mangsa-Pemangsa Hutchinson dengan Waktu Tunda dan Pemanenan Konstan adalah benar karya saya dengan arahan dari komisi pembimbing dan belum diajukan dalam bentuk apa pun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan maupun tidak diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir skripsi ini.Dengan ini saya melimpahkan hak cipta dari karya tulis saya kepada Institut Pertanian Bogor.
ABSTRAK
LILIS SAODAH. Analisis Kestabilan Model Mangsa-Pemangsa Hutchinson dengan Waktu Tunda dan Upaya Pemanenan Konstan. Dibimbing oleh ALI KUSNANTO dan JAHARUDDIN.
Model dalam tulisan ini disusun dari modifikasi model Lotka-Volterra dengan mempertimbangkan waktu tunda terhadap populasi mangsa dan sebuah parameter pemanenan konstan pada kedua populasi mangsa-pemangsa. Analisis kestabilan dilakukan terhadap model tanpa waktu tunda dan dengan waktu tunda. Untuk model tanpa waktu tunda diperoleh tiga titik tetap yang bersifat sadel dan simpul/spiral stabil, sedangkan titik tetap pada model dengan waktu tunda terdapat titik tetap yang bersifat sadel atau spiral stabil/tidak stabil. Untuk model dengan waktu tunda, semakin besar nilai waktu tunda mengakibatkan munculnya limit cycle dan terjadi bifurkasi Hopf. Dengan mengupayakan nilai pemanenan jatuh pada selang tertentu, maka kestabilan sistem dapat dipertahankan.
Kata kunci: model Lotka-Volterra, waktu tunda, pemanenan, bifurkasi Hopf, mangsa-pemangsa
ABSTRACT
LILIS SAODAH. Stability Analysis of Hutchinson Prey-Predator Population Model with Time Delay and Constant Effort of Harvesting. Supervised by ALI KUSNANTO and JAHARUDDIN.
In this paper we discussed a modified Lotka-Volterra model by considering a time delay to prey population and a constant harvesting parameter in both prey-predator populations. We performed stability analyzes to both models without time delay and with time delay. For one without time delay we obtained three equilibrium points which are saddle and nodes/spiral stable, while model with time delay possesses equilibrium point which is either saddle or spiral stable/unstable. In addition to the model with time delay, increasing value of time delay resulted in the appearance of a limit-cycle and Hopf bifurcation. By maintaining the value of harvesting parameter on a certain interval, then the stabilty of the system can be sustained.
Skripsi
sebagai salah satu syarat untuk memperoleh gelar Sarjana Sains
pada
Departemen Matematika
ANALISIS KESTABILAN MODEL MANGSA-PEMANGSA
HUTCHINSON DENGAN WAKTU TUNDA DAN
PEMANENAN KONSTAN
LILIS SAODAH
DEPARTEMEN MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM INSTITUT PERTANIAN BOGOR
PRAKATA
Puji dan syukur saya panjatkan kepada Allah subhanahu wa ta’ala atas segala karunia-Nya sehingga saya dapat menyelesaikan karya ilmiah dengan judul Analisis Kestabilan Model Mangsa-Pemangsa Hutchinson dengan Waktu Tunda dan Pemanenan Konstan.
Terima kasih penulis ucapkan kepada Mama, kakak serta seluruh keluarga saya atas segala doa dan dukungan yang telah diberikan selama menulis karya ilmiah ini. Ungkapan terima kasih juga saya sampaikan kepada Bapak Drs Ali Kusnanto, MSi selaku pembimbing skripsi pertama, Bapak Dr Jaharuddin, MS selaku pembimbing skripsi kedua dan Bapak Drs Siswandi, MSi selaku penguji. Tidak lupa juga untuk teman-teman seperjuangan Matematika 47 dan kakak-kakak Matematika 46 atas bantuan dan dukungannya.
Semoga karya ilmiah ini bermanfaat.
DAFTAR ISI
DAFTAR TABEL vi
DAFTAR GAMBAR vi
DAFTAR LAMPIRAN vi
PENDAHULUAN 1
Latar Belakang 1
Tujuan Karya Ilmiah 2
LANDASAN TEORI 2
HASIL DAN PEMBAHASAN 5
Model Matematika 5
1 Model Tanpa Waktu Tunda ( ) 6
Penentuan Titik Tetap 6
Penentuan Nilai Eigen dengan Menggunakan Analisis Kestabilan 7
2 Model dengan Waktu Tunda ( ) 9
Bifurkasi Hopf 11
Upaya Pemanenan 13
Simulasi 14
SIMPULAN 20
DAFTAR PUSTAKA 21
LAMPIRAN 22
DAFTAR TABEL
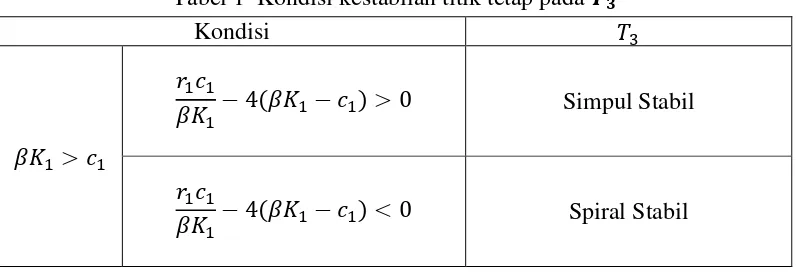
1 Kondisi kestabilan titik tetap pada 8
2 Kondisi kestabilan titik tetap 9
3 Nilai parameter 14
4 Titik tetap, nilai eigen, dan kestabilan untuk simulasi 1 14 5 Titik tetap, nilai eigen, dan kestabilan simulasi 2 15 6 Titik tetap, nilai eigen, dan kestabilan simulasi 3 15 7 Titik tetap, nilai eigen, dan kestabilan simulasi 4 16 8 Titik tetap, nilai eigen, dan kestabilan simulasi 5 17 9 Titik tetap, nilai eigen, dan kestabilan simulasi 6 17
10 Pemilihan nilai waktu tunda 18
DAFTAR GAMBAR
1 Bidang fase dan bidang solusi simulasi 1 15
2 Bidang fase dan bidang solusi simulasi 2 15
3 Bidang fase dan bidang solusi simulasi 3 16
4 Bidang fase dan bidang solusi simulasi 4 17
5 Bidang fase dan bidang solusi simulasi 5 17
6 Bidang fase dan bidang solusi simulasi 6 18
7 Bidang fase dengan waktu tunda (a) (b) 19 8 Bidang solusi populasi mangsa-pemangsa dengan waktu tunda 19 9 Bidang solusi populasi mangsa-pemangsa dengan waktu tunda 19
DAFTAR LAMPIRAN
1 Penentuan titik tetap model 22
2 Batas nilai upaya pemanenan 22
3 Penentuan Nilai Eigen Model 23
4 Penyederhanaan Model dengan Metode Linearisasi 25
5 Kode Program Gambar 1 26
6 Kode Program Gambar 2 27
7 Kode Program Gambar 3 27
8 Kode Program Gambar 4 28
9 Kode Program Gambar 5 28
10 Kode Program Gambar 6 29
11 Kode Gambar 7(a) 29
12 Kode Program Gambar 7(b) 30
13 Kode Program Gambar (8) 30
14 Kode Program Gambar 9 32
1
PENDAHULUAN
Latar Belakang
Tidak ada makhluk hidup yang dapat hidup terisolasi atau hidup tersendiri. Setiap makhluk hidup pasti akan berinteraksi dengan makhluk hidup lainnya. Seiring dengan interaksi tersebut terdapat rangkaian peristiwa memakan (predator) dan dimakan (prey) yang menjadikan ekosistem tetap seimbang. Predator merupakan spesies pemangsa, sedangkan prey adalah spesies yang dimangsa. Peristiwa ini memberikan ide untuk membuat model matematika, sehingga dapat menentukan perbandingan pemangsa dengan mangsa agar ekosistem tetap seimbang.
Pada dasarnya, pertumbuhan makhluk hidup pada suatu populasi merupakan proses yang berlangsung secara diskret, di mana pengukurannya dilakukan setiap selang waktu tertentu seperti tiap satu minggu, satu bulan, atau satu tahun. Untuk menggambarkan proses tersebut secara matematis, digunakan persamaan diferensial yang dapat menggambarkan hubungan ketergantungan antara jumlah populasi pada waktu yang berturut-turut. Sebagian besar model perkembangan dan pertumbuhan makhluk hidup mengikuti kaidah yang berkaitan dengan bentuk-bentuk dari fungsi taklinear, salah satu contoh model pertumbuhan ini adalah model pertumbuhan logistik, yaitu model pertumbuhan yang memperhitungkan faktor logistik berupa ketersediaan makanan dan ruang hidup.
Salah satu model mangsa-pemangsa yang paling terkenal dinamai setelah dua ilmuwan, Alfred Lotka dan Vito Volterra memperkenalkannya pada tahun 1926. Asumsi dasar dari model mangsa-pemangsa Lotka-Volterra adalah bahwa setiap populasi mengalami pertumbuhan atau peluruhan eksponensial. Kemudian model mangsa-pemangsa Lotka-Volterra dimodifikasi dengan menambahkan asumsi jumlah populasi juga dipengaruhi oleh adanya tingkat kompetisi di dalam populasi tersebut (Olinick 2006).
Kemudian untuk membangun model yang lebih realistis Baretta dan Kuang (1996) dan Ruan (2009) menambahkan waktu tunda untuk jangka respons pemangsa terhadap mangsa. Dalam hal ini diasumsikan bahwa penggunaan waktu tunda pada sistem ini disebabkan karena adanya waktu yang diperlukan populasi pemangsa dalam memangsa mangsanya.
2
Tujuan
Penulisan karya ilmiah ini bertujuan untuk:
1. merekonstruksi model mangsa-pemangsa dengan waktu tunda dan pemanenan konstan yang dituliskan oleh Toaha et al. (2006),
2. menganalisis kestabilan model mangsa-pemangsa dengan dan tanpa waktu tunda serta pemanenan konstan,
3. mempelajari pengaruh waktu tunda terhadap kestabilan sistem, dan, 4. mempelajari keberadaan bifurkasi Hopf pada model mangsa-pemangsa.
LANDASAN TEORI
Misalkan suatu sistem persamaan diferensial dinyatakan sebagai
̇ (1) disebut sistem persamaan diferensial tak linear.
Diberikan sistem persamaan diferensial taklinear
3
untuk suatu skalar . Skalar dinamakan nilai eigen (eigenvalue) dari dan dikatakan vektor eigen yang bersesuaian dengan .
Untuk mencari nilai eigen matriks yang berukuran , maka dapat dituliskan kembali sebagai
atau
dengan merupakan matriks identitas. Persamaan di atas akan mempunyai penyelesaian taknol (tak trivial) jika dan hanya jika
. (4) Persamaan (4) dinamakan persamaan karakteristik (Anton 1987).
Misalkan suatu SPD memiliki bentuk seperti berikut:
̇ ̇
sehingga matriks koefisien dari SPD di atas ialah
Berdasarkan persamaan , maka persamaan karakteristiknya menjadi
sedemikian sehingga diperoleh persamaan
dengan
dan
Dengan demikian diperoleh nilai eigen dari A adalah
4
Nilai eigen akan memenuhi kondisi:
o Jika 0 , maka nilai eigen adalah bilangan real dan berbeda tanda sehingga titik tetap merupakan titik sadel.
o Jika 0, maka nilai eigen dapat berupa bilangan real dengan tanda yang sama (titik tetap berupa simpul) atau bilangan kompleks conjugate (titik tetap berupa spiral atau center). Jika 240 dan 240, maka spiral. Persamaan parabola 240 adalah garis batas antara nodes dan spiral; star nodes dan degenerate nodes berada pada parabola ini. Stabilitas simpul dan spiral ditentukan oleh τ. Ketika τ 0, kedua nilai eigen memiliki tanda yang negatif, sehingga titik tetap stabil. Spiral dan simpul takstabil memiliki τ 0. Titik stabil netral atau center berada pada garis τ = 0, dimana nilai eigen adalah imajiner murni.
o Jika = 0, setidaknya ada satu nilai eigen yang sama dengan nol. Maka titik tetap merupakan titik terisolasi (Strogatz 1994).
Berdasarkan persamaan karakteristik, kriteria Routh-Hurwitz dapat digunakan untuk menentukan kestabilan suatu titik kesetimbangan. Secara umum menurut Fisher (1990), misalkan a1, a2, ..., ak adalah bilangan asli dan aj = 0 jika j
> k dengan persamaan karakteristik berupa polinomial berikut:
Semua nilai eigen dari persamaan karakteristik mempunyai bagian riil yang negatif (titik kesetimbangan ̅ stabil) jika dan hanya jika determinan dari semua matriks Hourwitz positif, yaitu , untuk .
Menurut kriteria Routh-Hourwitz di atas, untuk suatu nilai n (untuk n = 2,3) disebutkan bahwa titik kesetimbangan ̅ stabil jika dan hanya jika
n = 2; a1 > 0, a2 > 0,
n = 3; a1 > 0, a3 > 0, a1a2 > a3,
Khusus untuk kasus n = 2, bagian real nilai eigen dari persamaan karakteristik berikut:
5 adalah negatif jika dan hanya jika A positif, B positif sehingga AB > 0 (Fisher 1990).
Selanjutnya, Strogatz (1994) menjelaskan bahwa struktur kualitatif dari suatu sistem dinamika dapat berubah karena adanya perubahan dari parameter sistem tersebut. Hal inilah yang disebut bifurkasi. Bifurkasi adalah perubahan jumlah atau kestabilan titik tetap (titik kestabilan) dalam suatu sistem dinamik. Nilai parameter ketika terjadinya bifurkasi dinamakan titik bifurkasi. Salah satu jenis bifurkasi, yaitu bifurkasi Hopf.
Bifurkasi Hopf adalah kemunculan siklus batas (limit cycle) dari kesetimbangan dalam sistem dinamis yang dihasilkan oleh persamaan diferensial biasa, saat kesetimbangan mengalami perubahan stabilitas yang melalui sepasang nilai eigen murni imajiner. Bifurkasi mengakibatkan limit cycle menjadi stabil atau tidak stabil. Limit cycle sendiri merupakan orbit tertutup yang terisolasi. Terisolasi artinya bahwa orbit di sekelilingnya menuju atau menjauhi siklus limit.
HASIL DAN PEMBAHASAN
Model Matematika
Dalam karya ilmiah ini akan dibahas model Lotka Voltera mangsa-pemangsa dengan mengasumsikan model mangsa-mangsa-pemangsa dengan waktu tunda yang diambil dari model waktu tunda logistik Hutchinson’s oleh May (1974) : banyaknya populasi mangsa pada waktu t,
: banyaknya populasi pemangsa pada waktu t, : laju instrinsik dari mangsa,
6
: koefisien “kemudahan penangkapan” populasi pemangsa, : upaya pemanenan populasi mangsa,
: upaya pemanenan populasi pemangsa.
Untuk menganalisis model, akan diasumsikan pemanenan populasi mangsa-pemangsa konstan sehingga diasumsikan dengan positif . Sistem persamaan (6) menjadi:
dengan skala parameter yang digunakan adalah
Selanjutnya, diasumsikan yang merepresentasikan laju pertumbuhan instrinsik populasi pemangsa lebih besar dibanding upaya pemanenannya.
1 Model tanpa waktu tunda( )
Agar titik tetap memiliki komponen-komponen yang bernilai positif, maka . Pada titik tetap , batasan upaya pemanenan yang dinyatakan oleh diberikan sebagai berikut
7
Penentuan Nilai Eigen dengan menggunakan Analisis Kestabilan
Analisis Kestabilan dilakukan dengan mencari nilai eigen pada masing-masing titik tetap. Nilai eigen dilakukan dengan menggunakan matriks Jacobi dari persamaan (7), yaitu Jadi, kedua nilai eigen berbeda tanda sehingga titik tetap merupakan titik sadel.
Jika titik tetap disubstitusikan ke dalam matriks Jacobi, maka
Jika titik tetap disubstitusikan ke matriks Jacobian, maka diperoleh
8
Jika persamaan karakteristik dari matriks jacobian digunakan, maka diperoleh
dengan
Dalam hal ini titik tetap bersifat simpul stabil. ii)
sehingga
Dalam hal ini titik tetap bersifat spiral stabil.
Agar titik tetap stabil, maka nilai eigen harus negatif, sehingga
√(
Tabel 1 Kondisi kestabilan titik tetap pada Kondisi
Simpul Stabil
9 Jenis kestabilan semua titik tetap berdasarkan kondisi nilai eigen dapat dilihat pada Tabel 2.
Tabel 2 Kondisi kestabilan titik tetap
Sadel Sadel Stabil
Sadel Simpul Stabil -
Menurut Ho dan Ou (2002), jika dan
, maka semua
nilai eigen pada persamaan (8) bernilai negatif, yaitu
sehingga titik tetap bersifat stabil asimtotik.
2 Model dengan waktu tunda ( )
Model mangsa-pemangsa dengan waktu tunda yang diberikan pada persamaan (7) dianalisis dengan menggunakan pendekatan model linear di titik tetap . Untuk itu dimisalkan Analisis kestabilan di titik tetap pada model (9) ekivalen dengan analisis kestabilan dari titik tetap model persamaan (7) setelah dilinearisasi. Berikut ini akan ditentukan persamaan karakteristik untuk model persamaan (9). Jika persamaan pertama pada persamaan (9) diturunkan terhadap kemudian menggunakan persamaan kedua pada persamaan (9), maka diperoleh
10
Jika penyelesaian digunakan, maka diperoleh
(10)
dengan , dan . Berdasarkan persamaan (10) dapat disimpulkan bahwa matriks Jacobi dari persamaan (7) di titik tetap berbentuk
(
Model mangsa-pemangsa untuk waktu tunda pada persamaan (7) titik tetapnya bersifat stabil, sehingga nilai eigen dari matriks Jacobi dimisalkan
dengan dan ( . Untuk memperoleh nilai , maka nilai eigen disubstitusikan ke dalam persamaan (10) sehingga didapatkan persamaan karakteristik
atau
(11) Kemudian dengan memisahkan bagian real dan imajiner pada persamaan (11) diperoleh
(12)
Berdasarkan persamaan (12) diperoleh sehingga
atau
(13)
dengan adalah nilai waktut tunda pada jarak . Selanjutnya persamaan (12) dikuadratkan, maka diperoleh
11 Jika kedua persamaan pada persamaan (14) dijumlahkan, maka diperoleh persamaan polinomial untuk sebagai berikut
(15) dengan akar-akar penyelesaian berbentuk:
√ (16)
Dari persamaan (16), didapatkan solusi positif pada . Selanjutnya dapat ditemukan nilai dengan mensubstitusikan ke dalam persamaan (13).
Bifurkasi Hopf
Teorema 1 (Kar 2003)
Misalkan ada sebuah bilangan bulat positif sedemikian sehingga berubah kestabilan dari stabil ke tidak stabil atau sebaliknya. Jika transversabilitas, yaitu kondisi yang menyebabkan perubahan kestabilan titik tetap dengan waktu tunda. Kriteria kondisi yang digunakan adalah
pada persamaan (18) didapatkan
12
13 pertaksamaan yang dapat diselesaikan oleh upaya pemanenan atau dapat berbentuk
14
Simulasi
Dinamika populasi mangsa-pemangsa ini digambarkan oleh kurva dalam bidang fase dan bidang solusi untuk memudahkan kita melihat kestabilan populasi mangsa-pemangsa pada waktu t. Penyelesaian numerik dilakukan dengan cara mensubstitusikan nilai parameter yang ditentukan berdasarkan analisis kedalam persamaan model matematika mangsa-pemangsa Lotka-Volterra dengan menyesuaikan kondisi dinamika populasi mangsa-pemangsa tanpa dan dengan waktu tunda serta upaya pemanenan.
Dinamika Populasi Mangsa-pemangsa Tanpa Waktu Tunda
Terdapat dua kasus dalam dinamika populasi mangsa-pemangsa tanpa waktu tunda dimana nilai parameter untuk setiap simulasi yang digunakan dapat dilihat pada Tabel 3, dengan parameter lain yang bernilai tetap dalam setiap
Simulasi-simulasi diatas akan memperlihatkan pengaruh tingkat interaksi mangsa-pemangsa (laju penyerangan) dan upaya pemanenan dengan memenuhi kasus 1: dan kasus 2: . Kestabilan titik tetap setiap simulasi dapat dilihat sebagai berikut
Tabel 4 Titik tetap, nilai eigen, dan kestabilan untuk simulasi 1 Kasus 1
Jenis kestabilan Sadel Sadel Spiral Stabil
15
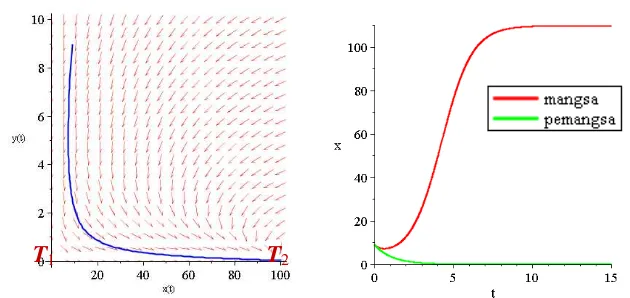
Gambar 1 Bidang fase dan bidang solusi simulasi 1
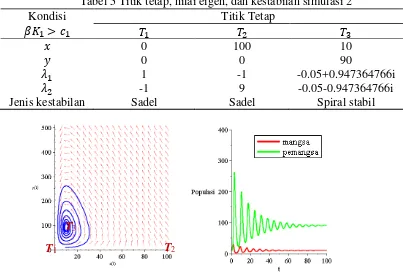
Tabel 5 Titik tetap, nilai eigen, dan kestabilan simulasi 2 Kondisi
Titik Tetap
0 100 10
0 0 90
1 -1 -0.05+0.947364766i
-1 9 -0.05-0.947364766i
Jenis kestabilan Sadel Sadel Spiral stabil
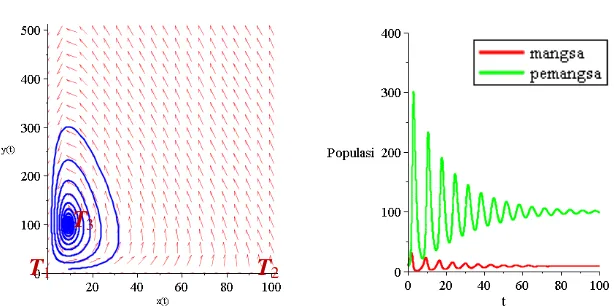
Gambar 2 Bidang fase dan bidang solusi simulasi 2
Tabel 6 Titik tetap, nilai eigen, dan kestabilan simulasi 3 Kondisi
Titik Tetap
0 109.9 9.01
0 0 100.89
1.099 -1.099 -0.04505+0.952359909i -0.901 10.089 -0.04505-0.952359909i Jenis kestabilan Sadel Sadel Spiral stabil
T1 T2
T3
T3
16
Berdasarkan kasus 1: , ilustrasi bidang fase pada ketiga simulasi bersifat spiral stabil menuju titik tetap . Sedangkan berdasarkan gambar bidang solusi, ketika tingkat interaksi mangsa ( lebih besar dibanding tingkat interaksi pemangsa ( mengakibatkan kedua populasi mangsa berosilasi.
Pada Tabel 4 menunjukan ketika nilai parameter tingkat interaksi mangsa ( lebih besar dibandingkan parameter tingkat interaksi pemangsa ( , terjadi osilasi antara kedua populasi ditunjukan pada gambar 1. Percepatan populasi pemangsa lebih cepat dibandingkan populasi mangsa. Sedangkan pada Tabel 5, ketika parameter tingkat interaksi pemangsa lebih kecil dibanding parameter tingkat interaksi pemangsa ( , osilasi populasi mangsa akan semakin kecil sehinga lebih cepat menuju kestabilan titik tetap. Hal ini ditunjukan pada gambar 2, kedua populasi tidak akan mengalami kepunahan dalam jangka panjang. Selain itu, pada Tabel 6 ketika nilai parameter upaya pemanenan diperkecil keadaan populasi akan sama dengan upaya pemanenan yang lebih besar pada gambar 3, sehingga upaya pemanenan tidak berpengaruh terhadap pertumbuhan populasi namun berpengaruh pada kestabilan populasi sehingga pemenanan bersifat konstan.
Selanjutnya pengaruh tingkat interaksi mangsa-pemangsa dan upaya pemanenan dengan memenuhi kondisi . Nilai diperkecil untuk melihat pengaruhnya pada simulasi. Kestabilan titik tetap yang diperoleh dapat dilihat pada Tabel 7, Tabel 8, dan Tabel 9.
Tabel 7 Titik tetap, nilai eigen, dan kestabilan simulasi 4 Kondisi
17
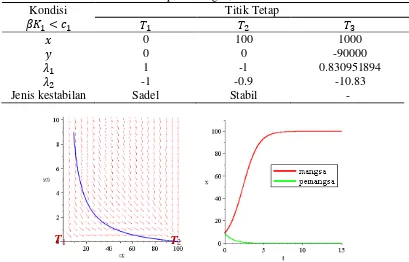
Tabel 8 Titik tetap, nilai eigen, dan kestabilan simulasi 5 Kondisi
Titik Tetap
0 100 1000
0 0 -90000
1 -1 0.830951894
-1 -0.9 -10.83
Jenis kestabilan Sadel Stabil -
Tabel 9 Titik tetap, nilai eigen, dan kestabilan simulasi 6 Kondisi
Titik Tetap
0 109.9 901
0 0 39.555
1.099 -1.099 -0.731681774
-0.901 -0.7911 9.741681774
Jenis kestabilan Sadel Stabil -
T1 T2
T1 T2
Gambar 4 Bidang fase dan bidang solusi simulasi 4
18
Berdasarkan kasus 2: , diberikan ilustrasi bidang fase pada titik tetap bernilai negatif. Gambar 4, Gambar 5 , dan Gambar 6 untuk simulai kasus ini memperlihatkan keadaan kedua populasi memiliki kesenjangan. Populasi mangsa mengalami pertumbuhan lalu mengalami kestabilan dalam jangka waktu panjang sedangkan populasi pemangsa dalam jangka panjang akan mengalami kepunahan. Hal ini disebabkan karena tingkat interaksi pemangsa dengan populasi mangsa semakin kecil sehingga sumber makanan yang didapat semakin kecil pula. Oleh karena itu, populasi pemangsa akan mengalami laju kematian karena tingkat kelaparan yang tinggi sehingga populasi punah dalam jangka panjang. Upaya pemenanan dalam kasus ini tidak mempengaruhi pertumbuhan kedua populasi sehingga pemanenan bersifat konstan.
Dinamika Populasi Mangsa-pemangsa dengan Waktu Tunda
Pada kasus ini, nilai parameter yang digunakan sama dengan tanpa waktu tunda yaitu , serta nilai awal dan . Selanjutkan, nilai kondisi . Untuk memenuhi teorema maka dilakukan pemilihan nilai waktu tunda pada Tabel 10 yang sesuai dengan mensubstitusikan ke persamaan .
Tabel 10 Pemilihan nilai waktu tunda
Menurut teorema Kar, titik tetap dikatakan stabil ketika
19
, sehingga titik tetap merupakan bifurkasi Hopf.
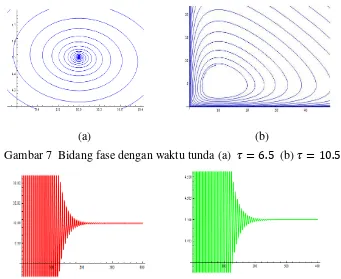
(a) (b)
Pada gambar 7 menunjukkan bidang fase terjadi perubahan kestabilan untuk bersifat stabil dan bersifat tidak stabil sehingga menurut teorema terjadi bifurkasi Hopf. Gambar 8 memperlihatkan kedua populasi berosilasi sehingga terjadi penurunan jumlah populasi karena adanya pertumbuhan mangsa yang mengalami penundaan pada masa kelahiran sehingga berkurangnya populasi mangsa sebagai sumber makanan populasi pemangsa. Namun kedua populasi akan stabil dan mendekati titik keseimbangannya.
(a) (b)
Gambar 9 bidang solusi saat menunjukkan kedua populasi terjadi osilasi yang semakin besar sehingga populasi mengalami kenaikan jumlah
Gambar 7 Bidang fase dengan waktu tunda (a) (b)
Gambar 8 Bidang solusi populasi mangsa-pemangsa dengan waktu tunda
Gambar 9 Bidang solusi populasi mangsa-pemangsa dengan waktu tunda
20
populasi karena adanya laju kelahiran mangsa yang ditentukan oleh tingkat interaksi pemangsa. Oleh karena itu, semakin besar nilai waktu tunda dalam pertumbuhan populasi menyebabkan ketidakstabilan terhadap pertumbuhan, dalam hal ini dapat mengakibatkan ledakan populasi dan juga penuruan populasi hingga akhirnya mengalami kepunahan. Namun dalam kasus ini populasi akan menjauhi titik keseimbangannya sehingga kedua populasi akan terus berosilasi.
Dinamika Populasi Mangsa-pemangsa dengan Upaya Pemanenan
Pada kasus ini, nilai parameter yang digunakan adalah
dengan asumsi nilai waktu tunda . Diperoleh titik tetap , lalu didapatkan nilai
dan diperoleh
Dari persamaan fungsi tersebut didapatkan solusi positif yaitu
.
Berdasarkan teorema 2, solusi diatas mengakibatkan titik tetap bersifat stabil dengan nilai waktu tunda ketika nilai upaya pemanenan berada pada
.
SIMPULAN
Model dalam tulisan ini disusun dari modifikasi model Lotka-Volterra dengan mempertimbangkan waktu tunda terhadap populasi mangsa dan sebuah parameter pemanenan konstan pada kedua populasi mangsa-pemangsa. Analisis kestabilan dilakukan terhadap model tanpa waktu tunda dan dengan waktu tunda. Untuk model tanpa waktu tunda diperoleh tiga titik tetap. Kestabilan titik tetap pertama selalu bersifat sadel, sedangkan titik tetap kedua akan bersifat sadel pada kondisi dan bersifat simpul stabil pada kondisi . Hal ini dapat disimpulkan, semakin kecil tingkat interaksi pemangsa terhadap mangsa maka akan mempengaruhi nilai titik tetap kedua. Dan untuk titik tetap ketiga akan bersifat simpul/spiral stabil bergantung pada kondisi yang diberikan. Model dengan waktu tunda titik tetap yang mempengaruhi hanya titik tetap ketiga, yaitu bersifat sadel dan spiral stabil/tidak stabil.
21
DAFTAR PUSTAKA
Anton H. 1987.Aljabar Linear Elementer. Jakarta(ID): Erlangga.
Baretta E, Kuang Y. 1996. Convergence Results in a Well-Known Delayed Predator-Prey System. Journal Mathematics Analysis 204:840-853.
Cushing JM. 1977. Integrodifferential Equations and Delay Models in Population Dynamics. Heidelberg: Springer-Verlag.
Fisher SD. 1990. Complex Variables. California (US): Wadsworth & Brooks. Ho CP, Ou YL. 2002. Influence of time delay on local stability for a
predator-prey system. Journal of Tunghai Sciences 4:47:62.
Holmberg J. 1995. Socio-ecological Principles and Indicators for sustainability, PhD Thesis, Goteborg University, Sweden.
Kar TK. 2003. Harvesting in a Two-prey One Predator Fishery: A Bioeconomic Model. J. ANZIAM 45:443-456.
Olinick M. 2006. Modelling the Predator-Prey Relationship. MAA Session on Environmental Mathematics.
Ruan S. 2009. On Nonlinear Dynamics of Predator-Prey Models with Discrete Delay. Math. Model. Nat. Phenom. 4:140-188.
Strogatz SH. 1994. Nonlinear Dynamics and Chaos, with Application to Physics, Biology, Chemistry, and Engineering. Massachusets (US): Addison- Wesley Publishing Company.
22
LAMPIRAN
Lampiran 1 Penentuan titik tetap model
Titik tetap persamaan (7) berdasarkan
dan
Lampiran 2 Batas nilai upaya pemanenan Berdasarkan dari titik tetap , diperoleh
23
Lampiran 3 Penentuan Nilai Eigen Model Misalkan
Substitusikan titik tetap ke dalam matriks Jacobi di atas, diperoleh
(
Nilai eigen dan vektor eigen ditentukan berdasarkan persamaan karakteristik
( , yaitu Nilai eigen yang diperoleh, dapat disimpulkan bahwa kestabilan bersifat sadel karena kedua nilai eigen berbeda tanda (Strogatz 1994).
Pelinearan titik tetap
Substitusikan titik tetap ke dalam matriks Jacobi di atas, diperoleh
24
Nilai eigen dan vektor eigen ditentukan berdasarkan persamaan karakteristik
( , yaitu
Substitusikan titik tetap ke dalam matriks Jacobi diperoleh
Nilai eigen dan vektor eigen ditentukan berdasarkan persamaan karakteristik
25
√
dimana
Lampiran 4 Penyederhanaan Model dengan Metode Linearisasi Tinjau persamaan (7) berikut:
Berikut persamaan (7) akan dilinearisasi dengan memisalkan variabel berikut:
Jika variabel dan disubstitusikan kedalam persamaan pertama, maka diperoleh
26
Dengan dan , parameter pertubasi. Tinjau persamaan kedua dari persamaan (7) berikut:
Jika variabel dan disubstitusikan kedalam persamaan kedua, maka diperoleh
27
Lampiran 6 Kode Program Gambar 2
Lampiran 7 Kode Program Gambar 3
28
Lampiran 8 Kode Program Gambar 4
29
Lampiran 10 Kode Program Gambar 6
30
Lampiran 12 Kode Program Gambar 7(b)
31
32
Lampiran 14 Kode Program Gambar 9 Bidang solusi
34
RIWAYAT HIDUP
Penulis dilahirkan di Bogor pada tanggal 30 April 1992 dari ayah Muhamad Soleh (alm) dan ibu Nyai. Penulis adalah putri keempat dari empat bersaudara. Pada tahun 2010 penulis lulus dari SMA Negeri 4 Bogor dan pada tahun yang sama penulis lulus seleksi masuk Institut Pertanian Bogor (IPB) melalui jalur Undangan Seleksi Masuk IPB dan diterima di Departemen Matematika, Fakultas Matematika dan Ilmu Pengetahuan Alam dengan mendapatkan beasiswa Bidikmisi.