LINE FOLLOWER ROBOT
TUGAS AKHIR
Diajukan sebagai salah satu syarat menempuh ujian Sarjana Strata I (SI)
pada Jurusan Teknik Elektro
Disusun Oleh :
DAVID MABRUR PRANOTO 13104011
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
LEMBAR PENGESAHAN TUGAS AKHIR
LINE FOLLOWER ROBOT
Oleh :
DAVID MABRUR PRANOTO
13104011
Program Studi Teknik Elektro Universitas Komputer Indonesia
Disahkan di Bandung, Agustus 2009
Menyetujui, Pembimbing
Muhammad Aria, MT. NIP. 4127.70.04.008
Mengetahui,
Ketua Program Studi Teknik Elektro
Muhammad Aria, MT. NIP. 4127.70.04.008
LEMBAR PENGESAHAN TUGAS AKHIR
Disahkan di Bandung, Agustus 2009
i
KATA PENGANTAR
Dengan menyebut nama Allah Yang Maha Pengasih lagi Maha
Penyayang, puji dan syukur penulis penjatkan kehadirat Allah Subhannahu Wata’ala, yang telah melimpahkan rahmat dan hidayah-Nya kepada penulis, sehingga tugas akhir yang diberi judul “LINE FOLLOWER ROBOT”, dapat diselesaikan. Tak lupa pula shalawat serta salam selalu tercurahkan pada
junjungan kita Nabi Besar Muhammad SAW. Adapun maksud penyusunan skripsi
atau tugas akhir ini adalah untuk menyelesaikan program studi S1 dan merupakan
salah satu syarat dalam menempuh ujian sarjana Jurusan Teknik Elektro
Universitas Komputer Indonesia (UNIKOM) Bandung.
Penulis menyadari bahwa tugas akhir ini masih jauh dari kesempurnaan,
dikarenakan segala keterbatasan yang dimiliki penulis, baik dalam penyajian
materi, sistematika penulisan, sumber bacaan, pengetahuan dan pengalaman
penulis. Walaupun demikian, penulis telah berusaha dan mencoba memberikan
sebuah karya yang bermanfaat bagi penulis khususnya dan bagi pembaca
umumnya.
Pada kesempatan ini, tidak lupa penulis ucapkan terima kasih kepada
semua pihak yang telah membantu kelancaran penyelesaian laporan ini, terutama
kepada:
1. Bapak Ir. Eddy Suryanto Soegoto, M.Sc. sebagai Rektor UNIKOM Bandung.
2. Bapak Prof. Dr. H. Ukun Sastraprawira, Ir., M.Sc. selaku Dekan Fakultas Teknik dan Ilmu Komputer Universitas Komputer Indonesia.
3. Bapak Muhammad Aria, MT. sebagai Ketua Jurusan Teknik Elektro UNIKOM Bandung sekaligus pembimbing dalam penulisan tugas akhir ini.
ii
5. Bapak dan Ibu Dosen Jurusan Teknik Elektro Fakultas Teknik dan Ilmu Komputer UNIKOM Bandung yang telah membekali ilmu pengetahuan kepada penulis selama menuntut ilmu di UNIKOM Bandung.
6. Ibu Mery selaku sekretaris jurusan Program Studi Teknik Elektro Universitas komputer Indonesia.
7. Kedua Orang Tua tercinta, tersayang, dan kuhormati, yang telah memberikan dukungan moril dan materil serta do’a restu kepada penulis. 8. Adik manisku tersayang, yang telah memberikan dukungan moril dan do’a
restu kepada penulis.
9. Mrs. Mabrur Pranoto yang cantik beserta keluarga besarnya, yang telah memberikan dukungan moril dan do’a restu kepada penulis.
10. Seluruh keluarga besar di Subang yang telah memberikan dukungan moril kepada penulis selama mengikuti masa perkuliahan.
11. Andriansyah Putra, yang telah membantu penulis dalam penyelesaian tugas akhir ini.
12. My Best Soulmate, Anggi Triana, atas semua dukungan moril kepada penulis selama ini.
13. Sahabat-sahabat kosan Ciheulang 89A, yang selalu memberikan dukungan moril kepada penulis.
14. Semua sahabat – sahabatku, dan rekan-rekan mahasiswa, terutama Jurusan Teknik Elektro yang telah memberikan bantuan dan dorongan kepada penulis
selama mengikuti masa perkuliahan sampai menyelesaikan skripsi ini, yang
tidak mungkin penulis sebutkan satu persatu.
Akhir kata, dengan segala kerendahan hati, penulis memanjatkan do’a kehadirat Allah Subhanahu Wata’ala semoga amal dan budi baik yang telah mereka berikan kepada penulis mendapat pahala dari-Nya. Amiin.
Bandung, Juli 2009
ABSTRAK
Line Follower Robot adalah sebuah susunan benda serta rangkaian
komponen elektronik yang dilengkapi dengan roda dan digerakkan oleh motor,
Pengendalian kecepatan sangat bergantung pada batas putaran dan pergesekan
antara ban robot dengan lantainya. Robot tersebut dirancang untuk bernavigasi
dan bergerak secara otomatis mengikuti sebuah alurgaris yang dibuat.
Untuk membaca garis, robot dilengkapi dengan sensor optik yang
diletakkan di ujung depan dari robot tersebut. Line Follower Robot ini memiliki
jenis dan bentuk serta memiliki beberapa sistem penggerak dan pengendali
sebagai pengatur kinerja yang beraneka ragam sesuai dengan kreativitas
pembuatnya. Pada perancangan proyek Line Follower Robot kali ini akan dibahas
dan dianalisis lebih dalam terhadap sistem pengendalinya. Software LabVIEW.7.1
dipilih untuk digunakan sebagai tempat merancang pengendalinya yang berupa
kontrol ON/OFF.
ABSTRACT
Line Follower Robot is a series of electronic component devices that
equiped with the wheels and moved by the motor. Speed controlling is belong to
rotation limit and wheel friction, where the robot designed to move and navigate
automatically follow a line chanel made.
For detecting the line, robot was equipped by the optical sensors that put
at frontside of the robot. Line Follower Robot has many kind fitur and different of
controlling methode type belong to programmer creativity. At this line follower
project will be more analyzed to it controlling system. LabVIEW 7.1 had been
choosen as the place to build it ON/OFF controlling system.
iii
1.5. Metoda Penelitian ... 3
1.6. Sistematika Penulisan ... 4
BAB II. TINJAUAN PUSTAKA ... 6
2.1. Line Follower Robot ... 6
2.2. Pengendali Line Follower Robot ... 8
2.2.1. Pengendali Mekanik ... 9
2.2.2. Software Perancang Program Pengendali ... 9
2.2.3. Program Pengendali Line Follower Robot ... 12
BAB III. PERANCANGAN ALAT ... 14
iv
3.2. Rangkaian Elektronika Line Follower Robot ... 16
3.2.1. Sistem Sensor dan Komparator ... 16
3.2.2. Driver Penggerak Motor DC ... 18
3.2.3. Sistem Aktuator ... 20
3.2.4. Sistem Catu Daya ... 20
3.3. Perancangan Program Pengendali Line Follower Robot ... 23
BAB IV. PENGUJIAN DAN ANALISA ... 29
4.1. Pengujian Sensor dan Komparator ... 29
4.2. Pengujian Driver ... 31
4.3. Pengujian Line Follower Robot ... 32
BAB V. PENUTUP ... 33
5.1. Kesimpulan ... 33
5.2. Saran ... 34
1
BAB I PENDAHULUAN
1.1. Latar Belakang
Kemajuan teknologi semakin berkembang sangat pesat pada kehidupan
manusia di era modern ini, khususnya pada bidang elektronika. Hal ini ditandai
dengan adanya berbagai peralatan yang diciptakan dan dapat dioperasikan serta
digunakan secara otomatis. Disebabkan oleh kemajuan teknologi inilah maka
berkembang suatu ilmu yang merupakan suatu pecahan dari ilmu elektronika yaitu
bidang ilmu robotika.
Robot dapat diartikan suatu peralatan yang dioperasikan dengan atau tanpa
bantuan manusia atau dengan kata lain bahwa robot merupakan suatu perangkat
otomatis. Saat ini sistem robot banyak digunakan dalam berbagai bidang
kehidupan masyarakat. Bahkan dalam beberapa tahun belakangan ini, sering
sekali diadakanya suatu kontes atau perlombaan robot yang bertujuan untuk
mengenalkan maupun memperluas ilmu pengetahuan khususnya dalam bidang
robotika. Berdasarkan hal-hal tersebut, maka terciptalah tuntutan untuk dapat
berkreasi merangkai atau merakit sesuatu yang bermanfaat dan mampu
meningkatkan kreativitas pribadi. Demi memenuhi tuntutan tersebut, maka pada
tugas akhir ini akan diaplikasikan sebuah proyek untuk merancang dan membuat
robot sederhana yang bisa berjalan mengikuti alur garis yang dibuat. Robot
2
Line Follower Robot adalah sebuah susunan benda serta rangkaian
komponen elektronik yang dilengkapi dengan roda dan digerakkan oleh motor,
dimana robot tersebut dirancang untuk bernavigasi dan bergerak secara otomatis
mengikuti sebuah alur garis yang dibuat. Line Follower Robot ini memiliki jenis
dan bentuk serta memiliki beberapa sistem penggerak dan pengendali sebagai
pengatur kinerja yang beraneka ragam sesuai dengan kreativitas pembuatnya.
Pada perancangan proyek Line Follower Robot kali ini akan dibahas dan
dianalisis lebih dalam terhadap sistem pengendalinya. Dari sekian banyak sistem
pengendali yang digunakan, metode kontrol ON/OFF yang digunakan.
Kontrol ON/OFF yang digunakan diaplikasikan menggunakan sebuah
software yang bernama LabVIEW 7.1. Dalam software ini kontrol line follower
robot dirancang sedemikian rupa sehingga mampu mengendalikan gerak dari
robot yang memiliki fungsi sebagai pengikuti garis.
1.2. Tujuan
Tujuan yang ingin dicapai dari pembahasan masalah dalam Tugas Akhir
ini adalah sebagai berikut:
1. Merealisasikan rancangan hardware sebuah Line Follower Robot.
2. Merancang perangkat lunak pengendali dengan menggunakan metode
3
1.3. Rumusan Masalah
Berdasarkan latar belakang yang telah dijelaskan sebelumnya, maka dapat
diambil suatu rumusan masalah yaitu bagaimana merancang dan merealisasikan,
serta menganalisa sebuah hardware line follower robot dengan menggunakan
metode kontrol ON/OFF pada software LabVIEW 7.1 sebagai tempat
perancangan sistem kendalinya.
1.4. Batasan Masalah
Pada tugas akhir ini permasalahan dibatasi hanya pada perancangan dan
analisa kendalinya yaitu dengan menerapkannya simulasi pada software
LabVIEW 7.1. Untuk permasalahan yang lainnya tidak dibahas lebih mendalam.
1.5. Metoda Penelitian
Dalam menyelesaikan tugas akhir ini dilakukan beberapa metode
penelitian dalam penyusunannya. Adapun metoda yang digunakan adalah sebagai
berikut:
1. Studi Pustaka
Untuk mendapatkan informasi-informasi yang berkaitan dengan
proses penyusunan tugas akhir sehingga dapat digunakan sebagai
acuan dalam proses perancangan.
2. Perancangan Alat
Pada tahapan ini adalah membuat dan merancang sebuah Line
4
3. Pembuatan Pengendali Pada LabVIEW
Pada tahapan ini pembuatan pengendali disimulasikan dan
diterapkan dengan program LabVIEW .7.1.
4. Pengujian dan Analisa
Menganalisa dan menyimpulkan hasil-hasil perancangan,
Mengambil suatu kesimpulan dari hasil uji coba serta memberi
saran pada proyek tugas akhir ini.
1.6. Sistematika Penulisan
Sistematika penulisan tugas akhir ini terdiri dari V (lima) bab, dengan
masing-masing bab sebagai berikut :
BAB I : PENDAHULUAN
Berisi tentang latar belakang masalah, tujuan penulisan, perumusan
masalah, batasan masalah, metoda penelitian, dan sistematika
penulisan.
BAB II : TINJAUAN PUSTAKA
Pada bab ini memuat teori-teori penunjang yang berhubungan
dengan penulisan.
BAB III : PERANCANGAN ALAT
Menjelaskan mengenai tahapan-tahapan perancangan sebuah Line
Follower Robot secara global dan lebih mendetail pada sistem
5
BAB IV : PENGUJIAN DAN ANALISA
Bab ini membahas dan menguji hasil dari perancangan kemudian
menjabarkan hasil analisa pada pokok bahasan yang telah
diperoleh.
BAB V : PENUTUP
Bab ini memuat kesimpulan dan saran-saran dari seluruh
6
BAB II
TINJAUAN PUSTAKA
2.1. Line Follower Robot
Line follower robot pada dasarnya adalah suatu robot yang dirancang agar
dapat beroperasi secara otomatis bergerak mengikuti alur garis yang telah dibuat
diatas lantai. Konsep dasar dalam pengoprasian line follower robot bergantung
pada pembacaan sistem sensor dan pengaturan gerak dari motor DC.
Adapun dasar pengoperasian Line follower robot secara lengkap adalah
sebagai berikut :
1. Untuk membaca garis, robot dilengkapi dengan sensor optik yang diletakkan di ujung depan dari robot tersebut. Sensor merupakan suatu
piranti elektronika yang berfungsi untuk mengubah besaran-besaran fisik
yang ada di alam menjadi besaran elektrik yang dapat dimengerti oleh
rangkaian elektronika.
Dari sudut pandang robot, sensor dapat diklasifikasikan dalam dua
kategori, yaitu sensor lokal (on-board) yang dipasang di tubuh robot, dan
sensor global yaitu sensor yang diinstall diluar robot tapi masih dalam
lingkungannya dan data sensor global ini dikirim balik ke robot melalui
komunikasi nirkabel (Pitowarno, 2006).
Dalam perancangan sebuah line follower robot, sensor merupakan salah
satu bagian sistem terpenting. Karena kemampuan robot untuk mengikuti
7
line follower robot biasanya menggunakan sensor intensitas cahaya yang
difungsikan untuk mendeteksi adanya garis putih pada lapangan dengan
warna hitam ataupun mendeteksi garis hitam pada alas berwarna putih.
Alasan penggunaan sensor intensitas cahaya yaitu pertimbangan
kemudahan pembacaan garis oleh sensor melalui pantulan cahaya yang
diterimanya.
Photo-reflectors, photo-transsistors ataupun photo-dioda merupakan
beberapa contoh sensor yang menggunakan intensitas cahaya dan biasa
digunakan pada rangkaian sensor line follower robot. Kesemuanya pada
dasarnya menggunakan prinsip infra red atau pantulan dari led.
2. Untuk mengendalikan robot diatas track, digunakan beberapa pengendali
mekanik, dan yang digunakan disini digunakan motor DC sebagai
penggeraknya kemudian menggunakan sebuah pengontrol untuk
mengendalikan motor tersebut dengan algoritma dan aturan yang
disesuaikan pula.
3. Pengendalian kecepatan sangat bergantung pada batas putaran dan
pergesekan antara ban robot dengan lantainya.
4. Ada dua jenis garis yang mampu dibaca oleh Line follower robot. Garis
putih dan garis hitam. Sesuai dengan setting yang ditentukan. Biasanya
8
Kelemahan Line Follower Robot
Selain memiliki fungsi dan kelebihan, line follower robot juga memiliki
beberapa kelemahan. Baik dalam perancangan ataupun dalam fungsinya,
Diantara kelemahan dari line follower robot yaitu :
1. Pemilihan garis dibuat pada abstraksi hardware dan tidak bisa dirubah
oleh software
2. Kalibrasi sulit, dan tidak mudah untuk mendapatkan setting nilai yang
sempurna
3. Mekanisme pengontrolan tidak mudah diterapkan pada kendaraan yang
besar dan tidak bisa diterapkan pada kendaraan yang non-elektrik
4. Ada beberapa jenis tikungan yang harus dihindari karena sulit dalam
penentuan setting nilainya
5. Tidak cocok digunakan pada permukaan yang kasar terlebih bergelombang
6. Bila kendali kecepatan tidak diatur, terkadang akan menyebabkan robot
menjadi tidak stabil.
2.2. Pengendali Line Follower Robot
Seperti telah dijelaskan sebelumnya, bahwa sebuah robot dapat bergerak
secara otomatis jika robot tersebut memanfaatkan dan menggunakan prinsip
sebuah pengendali di dalam sistemnya.
Pengendali yang diterapkan pada sistem robot ini terbagi menjadi dua
bagian, yaitu sistem pengendali mekanik dan sistem program pengendali utama.
9
perangkat keras dan elektronik, sedangkan program pengendali lebih ke
penggunaan sebuah perangkat lunak.
2.2.1. Pengendali Mekanik
Pengendali mekanik berupa perangkat elektronik yang terdapat pada
sistem line follower robot disebut juga sebuah driver. Dimana driver ini
akan mengendalikan sebuah sistem yang disesuaikan dengan karakter dari
drivernya tersebut.
Dalam merancang sebuah line follower robot biasanya driver lebih
dibutuhkan untuk mengatur sistem geraknya yang berupa motor DC yang
berfungsi sebagai penggerak roda, dimana kemudian pengendali tersebut
dikenal dengan driver motor.
Driver motor dapat disebut sebagai salah satu pengatur gerak dari robot
karena driver tersebut akan mengatur arah dan kecepatan putaran dari
motor DC yang digunakan untuk menggerakkan roda robot. Pengaturan
arah dan kecepatan putar motor DC oleh driver dilakukan dengan cara
memberi pengaturan tegangan yang diberikan pada motor DC.
2.2.2. Software Perancangan Program pengendali
Pada perancangan sebuah line follower robot biasanya digunakan sebuah
mikrokontroler sebagai pusat pengendalinya. Tetapi pada perancangan line
10
pengendalinya hanya akan memanfaatkan sebuah simulator, dan simulator
yang digunakan adalah LabVIEW 7.1.
Gambar 2.1 Tampilan muka software LabVIEW 7.1
Pertimbangan pemilihan software ini adalah karena kemudahan dalam
pemrograman dan pengaplikasiannya dengan menggunakan ikon.
11
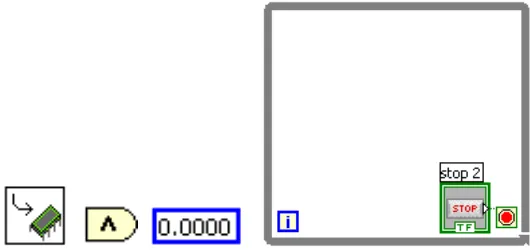
Gambar 2.2 merupakan contoh ikon inport, logika AND, numeric, dan
sebuah whileloop. Ikon tersebut seringkali digunakan dalam merancang
suatu sistem dalam LabVIEW.
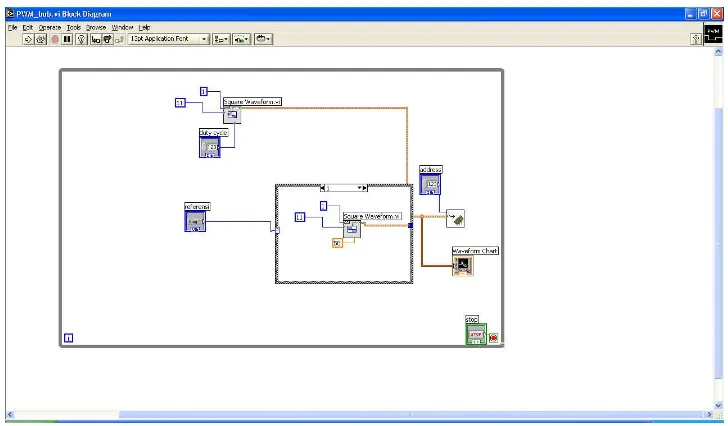
Berikut merupakan contoh tampilan dari front panel dan blok program
pada LabVIEW 7.1 yang dirancang sebagai pengatur PWM.
Gambar 2.3 Front panel pengatur PWM
12
Pada gambar 2.3 menunjukkan sebuah program pengatur PWM motor DC
yang sedang dalam keadaan running mengatur putaran sebuah motor DC
dengan duty cycle sebesar 50%. Kemudian pada gambar 2.4 menunjukkan
gambar rancangan program PWM tersebut.
Variasi bentuk dan pola program yang dibuat pada LabVIEW 7.1 ini
tergantung dari kretifitas perancangnya menyesuaikan dengan kebutuhan
sistem yang akan diatur.
Selain itu, untuk menghubungkan device sistem yang diatur diperlukan
sebuah konektor antara perangkat sistem dengan program dari simulator.
Konektor yang digunakan adalah port pararel db25.
2.2.3. Program Pengendali Line Follower Robot
Dalam mengendalikan sistem line follower robot ini digunakan simulasi
sistem pengendali ON/OFF. Dimana sistem akan beroperasi setelah
mendapat instruksi ON dan mati ketika mendapatkan instruksi OFF.
Dikatakan simulasi, sebab program pengendali tersebut tidak ditanam pada
sebuah komponen elektronik, melainkan langsung menggunakan simulator
dan CPU melalui port pararel yang dihubungkan dengan db25.
Metode kendali ON/OFF yang dirancang adalah dengan menset sensor
sebagai saklar terhadap motor DC melalui sebuah sistem pembacaan garis.
Untuk dapat lebih jelas melihat alur pemrograman yang dirancang sebagai
pengendalian line follower robot, maka digambarkan melalui sebuah
13
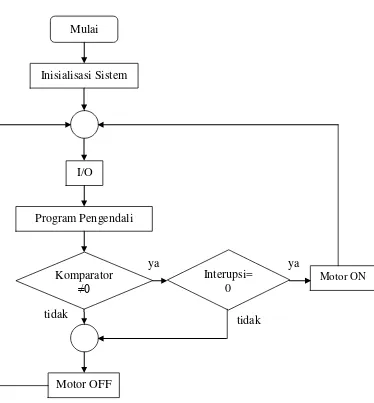
Gambar 2.5 Diagram alir pengendalian line follower robot
Ketika program dijalankan, keseluruhan sistem akan dicek. Kemudian
melalui port I/O data diolah dalm pengendali. Kemudian komparator di
cek, bila memberikan sinyal masukkan maka interupsi akan terjadi dan
motor berputar. Bila tidak, interupsi tak terjadi dan motor diam. tidak
tidak Mulai
Inisialisasi Sistem
Program Pengendali I/O
Motor ON
Motor OFF Komparator
≠0
Interupsi= 0
14
BAB III
PERANCANGAN ALAT
3.1. Konstruksi Fisik Line Follower Robot
Konstruksi fisik suatu robot menjadi dasar tumpuan dari rangkaian
eletronis dan software kontroler. Konstruksi fisik line follower robot didesain
untuk melakukan konsep atau tujuan untuk mengikuti garis. Sehingga hasil
konstruksi fisik line follower robot juga harus menyesuaikan dengan tujuan
seperti tersebut di atas, seperti digunakannya roda karena dibutuhkan suatu
perpindahan posisi robot.
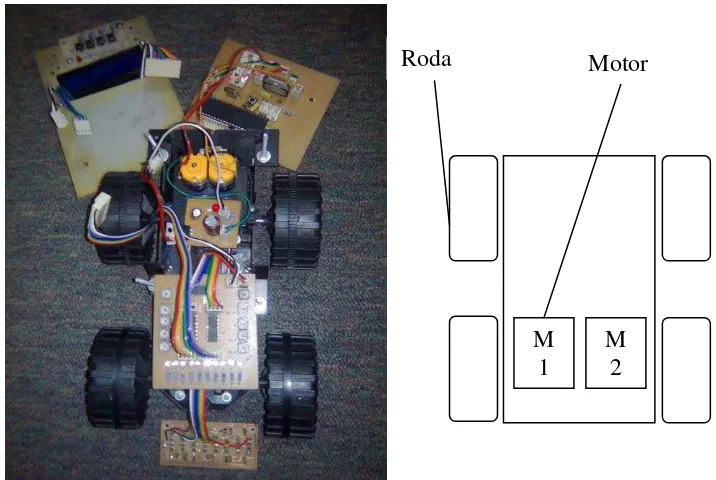
Gambar 3.1 Letak penggerak line follower robot
Konstruksi line follower robot digerakkan dengan dua penggerak yang
bekerja secara diferensial dan tidak diperlukan suatu kemudi. Letak penggerak M
1
15
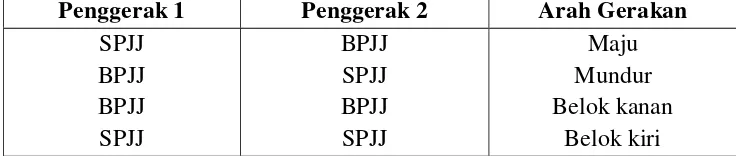
digambarkan pada gambar 3.1. Arah pergerakan didapatkan dari kombinasi arah
putar penggerak seperti disajikan pada Tabel 3.1.
Line follower robot yang dirancang memiliki empat roda, dimana roda
depan setiap sisi dihubungkan dengan roda belakang masing-masing sisi sehingga
mampu bergerak. Fungsinya untuk menambah daya dorong penggerak.
Dari hasil konstruksi line follower robot yang telah dirancang, maka
macam-macam perpindahan gerak robot dapat digambarkan seperti pada Gambar
3.2 berikut.
Gambar 3.2 Arah gerak line follower robot
Tabel 3.1 Arah putar penggerak
Penggerak 1 Penggerak 2 Arah Gerakan
SPJJ
SPJJ : Searah Putaran Jarum Jam
BPJJ : Berlawanan Putaran Jarum Jam
16
3.2. Rangkaian Elektronika Line Follower Robot
Hasil rangkaian elektronis pada line follower robot ini tergabung dari
beberapa modul komponen elektronis yang mempunyai fungsi-fungsi tersendiri
sehingga membentuk satu kesatuan sistem kontrol yang dapat menjalankan sistem
kontrol robot dengan dikendalikan oleh software yang dimasukkan kedalam
sistem line follower robot. Sistem line follower robot tersebut dapat dilihat
melalui sebuah diagram blok.
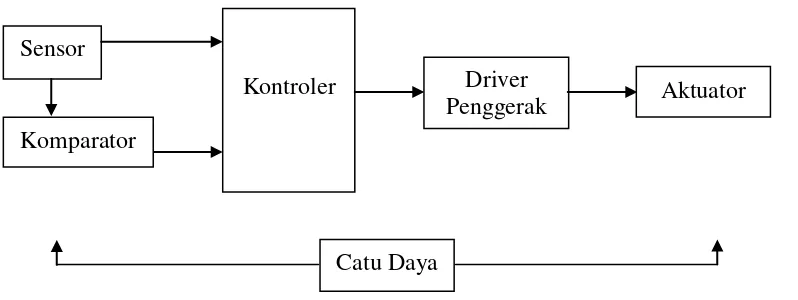
Gambar 3.3 Blok diagram sistem line follower robot secara umum
3.2.1. Sistem Sensor dan Komparator
Perancangan sensor line follower robot pada proyek tugas akhir ini
menggunakan sensor phototransistor. Sensor phototransistor adalah salah
satu sensor yang beroperasi secara biner. Phototransistor merupakan
sebuah modul sensor yang didalamnya terdapat kombinasi pancaran led
yang diterima oleh phototransistor dengan tingkat sensitif yang tinggi
melalui media pantulan suatu obyek atau media yang kemudian diperkuat Kontroler Driver
Penggerak Komparator
Aktuator Sensor
17
dengan penguat dan hasil output phototransistor dikomparasi terlebih
dahulu sehingga menghasilkan output 1 atau 0.
Sistem kerja phototransistor adalah output akan berlogika High (1) apabila
di depannya terdapat media yang terang dan akan berlogika Low (0)
apabila menemukan media yang lebih gelap. Jarak antara sensor dengan
media yang dideteksi berkisar ± 1 cm. Bentuk rangkaian dari
phototransistordapat dilihat pada gambar berikut.
7
Gambar 3.4 Rangkaian sensor dan komparator
Rangkaian phototransistor hanya memerlukan dua buah resistor dengan
ukuran 220 Ω dan 22 KΩ. Kaki kathoda pada led dihubungkan ke ground. Kaki emitter pada phototransistor dan anoda di pull up ke Vcc 5 volt
melalui resistor masing-masing 22 KΩ 220 Ω sebagai pembatas pada led
18
melalui led indikator. Sehingga diasumsikan keluaran normal sensor
berlogika High (1) dan untuk menjaga tidak terjadi drop tegangan pada
Vo.
3.2.2. Driver Penggerak Motor DC
Sesuai dengan namanya, motor DC didayai dengan tegangan DC (direct
current = arus searah). Dengan demikian putaran motor DC akan berbalik
arah jika polaritas tegangan yang diberikan juga berubah. Motor DC juga
memiliki tegangan kerja yang bervariasi, ada yang memiliki tegangan 3V,
6V, 12V dan 24V.
Untuk mengontrol motor DC yang bersifat solid-state dapat dipakai
rangkaian menggunakan transistor. Transistor disusun sedemikian rupa
hingga membentuk huruf H atau yang disebut bridge transistor,
H-bridge transistor tersusun dari 4 buah transistor dengan memanfaatkan
fungsi transistor sebagai saklar, yaitu titik cut off dan titik saturasi.
Pemilihan transistor yang dipilih dapat mengalirkan arus yang diperlukan
oleh motor DC.
Dengan semakin berkembangnya teknologi dalam dunia elektronika dan
semakin diintegrasikan atau dimampatkan setiap komponen sehingga
menjadi lebih praktis, ringkas dan efisien ke dalam integrated circuit (IC),
maka H-bridge transistor yang tersusun dari 4 buah transistor yang
19
IC L298 merupakan IC buatan SG5 Thomson Microelectron Inc. untuk
mengontrol motor. IC ini menerima kontrol pada level DTL maupun TTL
dan mampu menjalankan beban induktif seperti relay selenoid, motor DC
maupun motor stepper.
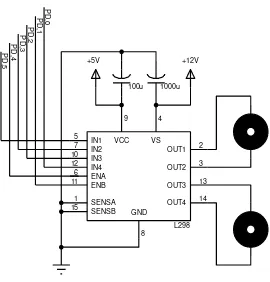
Penggerak motor dengan menggunakan IC driver L298 memiliki
kemampuan menggerakkan motor DC sampai arus 2A dan tegangan kerja
maksimum 40 Volt DC untuk satu kanalnya. Rangkaian driver penggerak
motor DC dengan menggunakan IC L298 dapat dilihat pada gambar
Gambar 3.5 Driver penggerak motor DC
Kaki enable motor A dan enable motor B pada gambar 3.6 digunakan
20
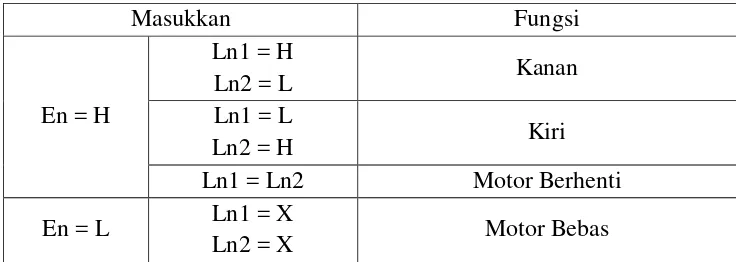
in3, dan in4 digunakan untuk mengendalikan arah putaran motor. Untuk
lebih jelasnya dapat dilihat pada table berikut.
Tabel 3.2 Pengaturan IC driver motor
Masukkan Fungsi
Aktuator adalah perangkat elektromagnetik yang menghasilkan daya
gerakan, pada line follower robot ini yang menghasilkan suatu gerakan
adalah motor DC yang digunakan sebagai penggerak robot (roda).
Struktur robot sebagian besar dibangun berdasarkan konstruksi mekanik.
Robot yang memiliki kemampuan navigasi dan manipulasi secara relatif
memiliki konstruksi mekanik lebih rumit dibandingkan dengan yang
berkemampuan navigasi saja.
Hal yang mendasar yang perlu diperhatikan dalam disain mekanik robot
21
sebagai penggerak utama yang akan bekerja optimal (torsi dan kecepatan
putar paling ideal) pada putaran yang relatif tinggi, hal ini tidak sesuai bila
porosnya dihubungkan langsung ke roda. Sebab gerakan yang diperlukan
pada sisi anggota badan robot adalah relatif pelan namun bertenaga. Untuk
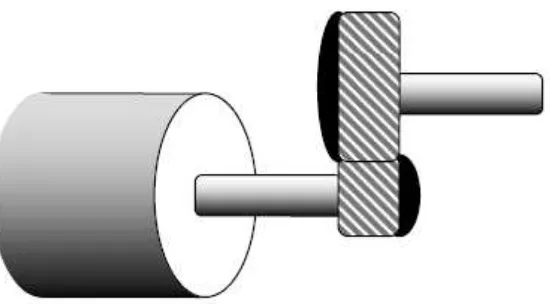
ini diperlukan metode dengan menggunakan sistem gir. Gambar 3.10
mengilustrasikan mekanisme peningkatan torsi motor menggunakan dua
buah gir.
Gambar 3.6 Penggunaan gir
Gambar 3.10 adalah penggunaan gir pada motor DC yang dinamakan
dengan transmisi gir hubungan langsung. Arah putaran poros pada
transmisi gir ini adalah selalu berlawanan untuk setiap sambungan serial.
Untuk mendapatkan arah putaran yang sama seperti pada poros motor
22
3.2.4. Sistem Catu Daya
Baterai merupakan sumber daya utama yang dipakai sebagai pemberi
hidup pada robot. Pemilihan baterai sangat penting untuk memenuhi
kebutuhan sumber daya robot pengikut, secara umum jenis baterai yang
tersedia dipasaran sangat banyak seperti : baterai karbon, baterai alkaline,
Nickel Codmium, baterai, Nickel Metal Hydride, baterai lithium ion dan
lead acid.
Baterai yang digunakan pada line follower robot adalah baterai berjenis
Nickel codmium baterai. Dimana Nickel codmium (Ni-cad) adalah jenis
baterai yang umum dipakai pada mobil mainan (Tamiya). Hal ini tidak lain
adalah karena jenis baterai ini merupakan jenis baterai yang dapat diisi
ulang (rechargeable). Baterai ini memiliki tegangan kerja 1,2 Volt.
Sebagaimana baterai karbon, baterai Ni-cad terdapat berbagai ukuran sama
seperti pada ukuran baterai karbon ditambah ukuran seloid baterai pack
(cordlesstelepon dll). Kapasitas simpan baterai Ni-cad yang berukuran AA
tertulis pada tubuh baterai adalah 2000 mA, artinya jika baterai tersebut
secara terus menerus mendayai suatu beban dengan arus 2 Ampere, maka
baterai akan menjadi kosong setelah 1 jam.
Baterai Ni-cad memiliki kelemahan yang dinamakan ‘memory effect’ yaitu
kapasitas baterai akan berkurang jika baterai tersebut tidak dikosongkan
secara penuh sebelum mengisinya kembali (rechargeable).
Sumber daya yang dibutuhkan setiap rangkaian modul pada robot pengikut
23
Ampere, maka baterai Ni-cad yang memiliki tegangan kerja 1,2 Volt
diperlukan sebanyak 5 buah baterai Ni-cad dengan baterai disusun secara
seri seperti pada Gambar 3.12 sehingga akan didapatkan tegangan total
Gambar 3.7 Rangkaian catu daya baterai line follower robot
Lima buah batre yang disusun secara seri kemudian dihubungkan secara
pararel dengan IC 7805, kapasitor 1000µ F, dan 100µ F yang berfungsi
untuk membagi tegangan. Selain itu, resistor 220 Ω dipasang seri dengan sebuah led yang berfungsi sebagai indikator dari rangkaian catudaya
tersebut.
3.3. Perancangan Program Pengendali Line Follower Robot
Seperti yang telah dijelaskan pada batasan masalah, bahwa perangkat
lunak yang dibahas lebih mendalam adalah perancangan program dengan
24
Perancangan pengendali pada software LabVIEW 7.1 ini lebih berorientasi
pada pengolahan data dari pembacaan posisi keempat sensor phototransistor line
follower robot yang kemudian berfungsi untuk mengatur arah putar gerak motor
DC agar line follower robot dapat bergerak dengan sesuai mengikuti garis yang
dibuat. Jadi dapat disimpulkan bahwa perancangan program pada software ini
berfungsi sebagai pengendali dari line follower robot yang dirancang (ON/OFF).
Gambar 3.8 Blok diagram sistem pengendali pada software LabVIEW 7.1
Dari gambar diatas dapat dilihat bahwa sensor phototransistor memberikan
sinyal masukkan ke CPU (Central Processing Unit) melalui port pararel db25,
yang diterima oleh status line. Kemudian data dikirim ke program pengendali
yang telah dirancang kemudian hasil data olahan dikirim ke driver motor melalui
25
3.3.1. Program Inport dan Outport
Sebelum dan sesudah merancang sebuah pemrograman suatu sistem, maka
perlu dirancang juga sebuah program penerima data agar sinyal dari sensor
dapat diproses oleh program, dan sebuah program pengirim data agar
sinyal data yang telah diolah dapat disampaikan kepada driver motor.
Program penerima dan pengirim data yang digunakan pada LabVIEW 7.1
menggunakan program inport dan outport.
Gambar 3.9 Front panel program input dan output
Pada tampilan front panel input dan output terdapat kontrol address
sebagai tempat pengalamatan port pada db25, dan indikator dataread yang
26
Gambar 3.10 Blok program input dan output
Pada blok program dirancang sebuah program penerima data dan pengirim
data yang berupa inport dan outport. Inport diset pada alamat status line
maksudnya agar inport hanya mengambil data yang diterima dari status
line saja. Array berfungsi untuk mengatur masukkan yang diterima inport.
Numeric yang berisi angka biner berfungsi untuk menstabilkan port yang
inverted pada status line, sedangkan outport dialamatkan ke data line
dengan tujuan agar driver yang dipasang pada port data line dapat
menerima keluaran data yang telah diolah dari program LabVIEW.
3.3.2. Program Proses Pengendali Line Follower Robot
Program pengendali ini berfungsi sebagai pengatur sistem melalui port
data line. Pada line follower robot ini, program dirancang untuk mengatur
27
Gambar 3.11 Front panel program pengendali motor DC
Pada front panel program pengendali motor DC terdapat tempaat memberi
alamat port db25. Kemudian numeric1, dan numeric 2 berfungsi sebagai
penerima perintah untuk menggerakkan motor.
28
Pada blok program, sebelum data dikirim melalui outport, terlebih dahulu
data ditentukan arah port data linenya yang terhubung pada kaki driver
melalui sebuah case structur. Kemudian secara otomatis driver akan
menjadi saklar untuk menggerakkan motor DC sesuai dengan perintah
pada program.
Untuk kemudian dapat merancang sebuah program pengendali line
follower robot, program I/O digabungkan dengan program pengendali
motor DC dalam sebuah whileloop. Sehingga secara otomatis sensor akan
menjadi saklar untuk motor DC, sekaligus mengatur gerak dari line
29
BAB IV
PENGUJIAN DAN ANALISA
Seperti dijelaskan pada bab sebelumnya, sebuah robot terdiri dari tiga
elemen penting agar menjadi suatu rangkaian otomatis yang terintegrasi, yaitu
konstruksi fisik robot, rangkaian elektronis dan suatu software yang mengontrol
komponen tersebut. Maka, untuk dapat mengetahui kelemahan dan kelebihan
yang dimiliki sistem, diperlukan sebuah pengujian terhadap keseluruhan
modul-modul penyusunnya.
4.1. Pengujian Sensor dan Komparator
Dalam perancangan sensor cahaya, phototransistor digunakan untuk
mendeteksi garis melalui pantulan cahaya yang diterima sensor dari led, dengan
jangkauan resistansi ± 1 KOhm hingga ± 14 KOhm dan berfungsi secara stabil
pada resistansi ± 6 KOhm. Nilai tersebut diperoleh dari hubungan pararel antara
resistor yang terhubung dengan phototransistor dan singleturn yang digunakan.
Rentang resistansi tersebut digunakan sebagai patokan untuk menentukan
jarak phototransistor dengan bidang pantul, dan jarak phototransistor dengan led.
Hal tersebut dapat mengurangi adanya pengaruh cahaya masukkan dari luar,
sehingga sensor phototransistor mampu menghasilkan tegangan normal antara 3 V
– 5 V ketika dalam keadaan high dan 0 V pada saat low.
Untuk itu, maka pengujian yang dilakukan adalah pengujian sensitifitas
30 Gambar 4.1 Hasil pengujian rangkaian pengkondisi sinyal
Pada rangkaian ini, selain pengujian sensor, secara otomatis komparator
akan terujikan juga. Pengujian komparator ini dilakukan dengan cara mengukur
tegangan masuk dari sensor ketika dijauhkan dan didekatkan pada bidang pantul
led. Fungsinya adalah untuk menghasilkan dan membedakan logika high dan
logika low secara jelas.
Tabel 4.1 Hasil pengujian komparator.
Kondisi Komparator Volt
Jauh dari bidang pantul max ± 10cm 0.2
Dekat dari bidang pantul 3.6
Jauh dari sumber cahaya luar pada saat
sensor kondisi low
0.2
Jauh dari sumber cahaya luar pada saat
sensor kondisi high
3.6
Dekat dengan sumber cahaya luar pada
saat sensor low
0.7
Dekat dengan sumber cahaya luar pada
saat sensor high
31
Dari tabel 4.1 dapat dianalisa bahwa tegangan yang dihasilkan
pembanding (komparator), akan terpengaruh oleh cahaya yang datang dari luar.
Sehingga ketika seharusnya kondisi high pembanding tersebut menghasilkan
tegangan antara 3 V- 5 V, akan berkurang sebesar intensitas cahaya yang masuk
kedalam sensor. Begitu pula saat kondisi low pembanding memiliki tegangan
yang lebih besar dari saat sensor berada jauh dari sumber cahaya luar.
Masalah tersebut dapat diatasi dengan cara mengatur besarnya resistansi
yang dikeluarkan oleh pembanding melalui singleturn. Sehingga tegangan
referensi akan menyeseuaikan dengan set yang dikehendaki dan pembanding tetap
dapat menghasilkan nilai logika 1 pada saat kondisi high walaupun tegangan yang
dihasilkan antara 2.5 V – 3.5 V, dan memberikan nilai logika 0 pada saat kondisi
low walaupun tegangan yang dihasilkan antara 0.3 V – 0.8 V.
4.2. Pengujian Driver
Pengujian driver motor dilakukan dengan dua cara, yaitu pertama menguji
driver dengan menggunakan input tegangan yang berasal dari sensor sebagai
pengatur arah dan kecepatannya. Kemudian yang kedua menguji driver dengan
menggunakan program pengatur kecepatan dan arah motor DC.
Hasil pengujian driver menunjukkan bahwa pada saat rangkaian driver
mendapat logika 1 (full on) motor DC berputar cepat. Hal ini disebabkan karena
transistor on, sehingga seolah-olah kolektor terhubung singkat terhadap ground.
32
mati. Hal ini disebabkan karena transistor off, sehingga hubungan kolektor-emitor
tampak seperti saklar terbuka.
4.3. Pengujian Line Follower Robot
Pengujian line follower robot secara keseluruhan dilakukan dengan
bertahap. Tahap pertama yaitu melihat pembacaan sensor dan pengaruhnya
terhadap program yang dirancang.
Ketika bagian sensor yang membaca garis dihubungkan kedalam program,
maka dataread yang diterima program menunjukkan besar angka tegangan yang
dihasilkan oleh sensor tersebut.
Tahap kedua, menguji kesesuaian gerak motor dengan pembacaan sensor
terhadap garis. Pengujian tersebut dilakukan untuk memastikan bahwa sensor,
program dan gerak motor telah sesuai atau belum.
Dikarenakan pada saat perancangan program di set satu motor digerakkan
oleh dua sensor, maka ketika sistem mulai dioperasikan dan sensor paling kiri saja
yang membaca garis, motor berputar searah jarum jam, dan ketika sensor yang
sebelah kanan saja yang membaca garis, motor berputar berlawanan arah jarum
jam. Hal tersebut menyebabkan gerakkan maju dan mundur pada robot.
Setelah dipastikan sensor, program, dan driver motor sesuai, kemudian
dilakukan pengujian line follower robot untuk bergerak diatas garis. Hasilnya
33
BAB V PENUTUP
5.1. Kesimpulan
Setelah melalui tahap perencanaan dan perancangan, maka sebuah line
follower robot dapat direalisasikan. Kemudian dilakukan pengujian dan analisa
pada sistemnya yang dapat diambil beberapa kesimpulan sebagai berikut :
1. Line follower robot merupakan suatu rangkaian otomatis terintegrasi yang
terdiri dari tiga komponen penting yaitu, konstruksi fisik, rangkaian
elektronis, dan software pengontrol.
2. Pengaturan jarak deteksi sensor dapat dilakukan dengan mengatur
besarnya nilai penguatan pada phototransistor.
3. Kendali pada line follower robot ini diterapkan menggunakan software
LabVIEW 7.1 dengan metode ON/OFF.
4. Penggunaan kendali ON/OFF pada LabVIEW 7.1 yang dihubungkan
melalui port pararel memang tidak praktis, tetapi dalam perancangannya
dirasakan lebih mudah.
5. Semua sistem yang dimiliki oleh line follower robot saling berhubungan.
Jadi, ketika salah satu sistem tidak berfungsi dengan baik, akan
34
5.2. Saran
Dalam merencanakan dan merancang sebuah line follower robot,
diperlukan kecermatan dan ketelitian dalam pemilihan bahan penyusun konstruksi
fisik, komponen elektronik, dan terlebih pada software pengontrolnya agar sistem
yang dirancang dapat berfungsi dengan sempurna.
Line follower robot merupakan salah satu hasil karya teknologi, maka
sistem ini diharapkan dapat dimanfaatkan dan diaplikasikan dalam kehidupan
DAFTAR PUSTAKA
Aria, Muhammad. (2007). Modul Praktikum Kendali Cerdas, Bandung :
UNIKOM
Geedex’s blog.mht Line Follower Robot dengan PID, Maret : 2009, Bandung.
______Workshop Robotika 2007, Juni 2007, Bandung.
Predko, Myke. Programming and Customizing the PIC microcontroller. 2009
Thiang, B42 – 48 (download), maret 2009, Bandung.
Winoto, Ardi. (2008). Mikro Kontroler AVR ATmega8/32/16/8535 dan
Pemrogramannya dengan Bahasa C pada WinAVR, Informatika, Bandung.
Aribowo, Robot Mobil Penjejak Arah Cahaya Dengan Pengendali Logika Fuzzy,
September: 2008, Semarang.
www.datasheetcatalog.com, L298, 2009, Bandung.
www.datasheetcatalog.com, LM339, 2009, Bandung.
CURICULUM VITAE
Nama : David Mabrur Pranoto
TTL : Subang, 19 Maret 1985
Agama : Islam
Alamat : Jl. P. Sulawesi 1 No. 5
RT 29/10 Cikalapa
Kel. Pasirkareumbi
Subang 41214
Telepon : (0260) 420920
HP : 085222727686
Email : mr_dmp@yahoo.com
Pendidikan : 1990 – 1991 TK Chandra Puspa Kab. Subang 1991 – 1997 SD Negeri Kota Baru Kab. Subang 1998 – 2001 SMP Negeri 2 Subang
2001 – 2004 SMU Negeri 1 Subang