Rancang Bangun mini Remotely Operated Vehicle (ROV) untuk Eksplorasi Bawah Air.
Teks penuh
Gambar

Dokumen terkait
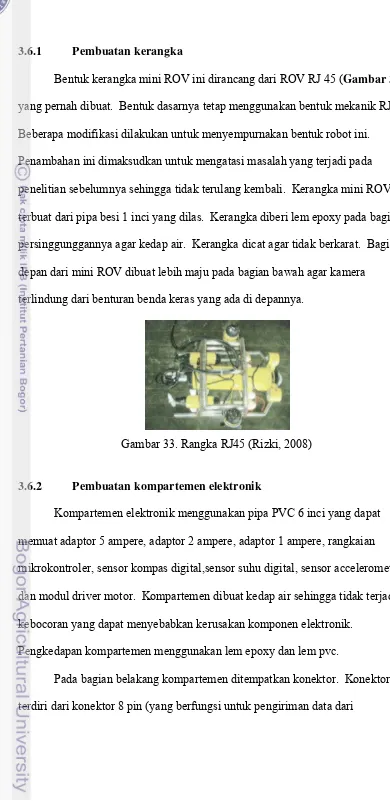
Bagian depan kerangka ROV dibuat lebih maju agar dapat melindungi dome kamera yang terbuat acrilyc dari benturan, karena dome adalah bagian yang paling mudah pecah jika
Gelombang yang dihasilkan kapal memiliki 2 sistam gelombang, yaitu sistem gelombang transversal dan divergen, hal ini diungkapkan juga oleh Mollanf dkk (2004). Sistem
Sedangkan jarak yang dapat ditempuh untuk penerimaan data di pengirim dan penerima saat robot menyelam yaitu sampai kedalamn maksimal 30 cm Ditandai dengan motor yang
Untuk gerakan robot pada saat mengapung di permukaan air, motor penggerak yang dominan adalah motor 1 dan 3 karena daya apung robot akan diambil alih oleh tabung ballast
Pengujian pertama dilakukan untuk melihat kinerja sensor MS5540CM dalam pengambilan data. Data dari sensor tersebut adalah nilai tekanan dengan satuan Mbar. Kemudian
Perancangan sistem visi ROV terkendali ini terdiri dari 4 bagian utama, yaitu input yang terdiri dari kamera sebagai perangkat untuk mengambil gambar/video dibawah
Pada hasil simulasi yang dilakukan dengan memberikan gaya sebesar 10 kg yang terfokus pada batang tengah rangka ROV diperoleh nilai vector X, Y, dan Z yang
Dalam penelitian ini akan dibuat tiga macam desain dan analisa Thruster untuk DIPO ROV yaitu model jenis Ducted Fan , model jenis B5 75 Series Outline Kaplan
