KAJIAN STABILITAS OPERASIONAL
KAPAL
LONGLINE
60 GT
SHANTY L. MANULLANG
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa tesis Kajian Stabilitas Operasional
Kapal Longline 60 GT adalah karya saya sendiri dengan arahan komisi
pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Bogor, Juli 2008
RINGKASAN
SHANTY L. MANULLANG. Kajian Stabilitas Operasional Kapal Longline 60 GT. Dibimbing oleh JAMES P. PANJAITAN dan BONAR P. PASARIBU.
Stabilitas suatu kapal baik kapal niaga maupun kapal perikanan sangat perlu diutamakan agar operator kapal dapat memperhitungkan bagaimana kondisi stabilitas kapal yang akan dioperasikan.
Oleh karena itu didalam penelitian ini dilakukan perhitungan untuk
mengetahui tentang stabilitas operasional kapal longline dimana parameter stabilitas ini dapat dilihat dari bentuk geometri kapal ketika berlayar di laut.
Penelitian ini dilakukan dengan cara menganalisis stabilitas operasional kapal dengan menganalisa kurva stabilitas GZ yang dibandingkan dengan standar yang ada. Hasil perhitungan stabilitas kemudian dibandingkan dengan standar
stabilitas kapal yang dikeluarkan oleh United Kingdom Regulation [The Fishing
Vessels (Safety Provision) Rules, 1975] (Hind, 1982) dan International Maritime Organization (IMO) pada Torremolinos International Convention for The Safety of Fishing Vessels-regulation 28 (1977) melalui kurva GZ.
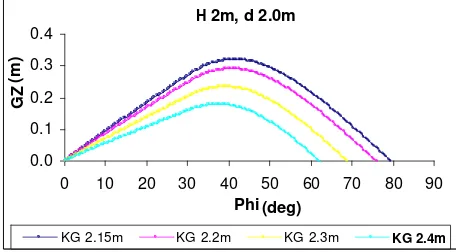
Hasil yang diperoleh menunjukkan bahwa pada tinggi gelombang 1 meter kondisi yang aman bagi kapal longline 60 GT ini untuk melakukan operasi penangkapan yaitu pada draft 1. 54m (KG kapal 2.2m), draft 1.8m (KG kapal 2.15m dan KG 2.2m), draft 2.0m (KG kapal 2.1m dan KG 2.15m) and draft 2.2 (KG kapal 2.07m dan KG 2.1m). Untuk tinggi gelombang 1.5 meter kondisi yang aman bagi kapal ini untuk melakukan operasi penangkapan adalah pada draft 1.54m (KG kapal 2.15m), draft 1.8m (KG kapal 2.2m), draft 2.0m (KG kapal 2.15m dan KG kapal 2.2m), draft 2.2m (KG kapal 2.1m dan KG kapal 2.15m), sedangkan untuk tinggi gelombang 2 meter kondisi yang aman dalam melakukan operasi penangkapan adalah pada draft 2.0m (KG kapal 2.15m dan K G kapal 2.2m), draft 2.2m (KG kapal 2.15m).
ABSTRACT
SHANTY L. MANULLANG. A study on The Operational Stability of Longliner 60 GT. Supervised by JAMES P. PANJAITAN and BONAR P. PASARIBU.
A study was conducted to examine the operasional stability of a tuna longline sized 60 GT. The righting arm of a ship is the primary measurement used to evaluate a fishing vessel’s stability. The righting arm curve is calculated from the center of gravity and center of buoyancy at a series of fixed heel angles. In this research the righting arm are calculated. The criteria of stability are from IMO. The result indicated that the change of draught can make the vessel unstably.
The best condition for tuna longliner 60 GT to operation in safety is in draught 1.54m (KG 2.2m), draught 1.8m (KG 2.15m and KG 2.2m), draught 2.0m (KG 2.1m and KG 2.15m) and draught 2.2 (KG 2.07m and KG 2.1m) for 1 meter in wave height, for 1.5 meter in wave height the best condition in draught 1.54m (KG 2.15m), draught 1.8m (KG 2.2m), draught 2.0m (KG 2.15m and KG 2.2m), draught 2.2m (KG 2.1m and KG 2.15m),and for 2 meter the best condition to operate the vessel is in draught 2.0m (KG 2.15m and KG 2.2m), draught 2.2m (KG 2.15m). We also used statistical method to analyze the effect of the changing of draught.
© Hak cipta milik Institut Pertanian Bogor, tahun 2008 Hak cipta dilindungi Undang-undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini
tanpa mencantumkan atau menyebutkan sumber pengutipan hanya untuk kepentingan pendidikan,
penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah
2. Dilarang mengumumkan dan memperbanyak sebagian
KAJIAN STABILITAS OPERASIONAL KAPAL LONGLINE 60 GT
SHANTY L. MANULLANG
Tesis
Sebagai salah satu syarat untuk memperoleh gelar Mangister pada
Departemen Pemanfaatan Sumberdaya Perikanan
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PRAKATA
Puji syukur penulis panjatkan kehadirat Allah Bapa atas kasih dan karunia-Nya, akhirnya karya ilmiai ini berhasil diselesaikan. Karya ilmiah deang judul ” Kajian Stabilitas Operasional Kapal Longline 60 GT ” disusun sebagai salah satu syarat untuk memeperoleh gelar Magister Sains pada Institut Pertanian Bogor.
Pada kesempatan ini penulis ingin mengucapkan terima kasih dan penghargaan yang tulus kepada :
1. Bapak Dr. Ir. James P. Panjaiatan , M.Phill dan Bapak Prof . Dr. Ir. Bonar
P. Pasaribu M.Sc selaku pembimbing yang telah beredia meluangkan waktu sewrta penuh kesabaran telah membimbing dan mengarahkan penulis semenjak pengumpulan data, pengolahan hingga penyelesaian penulisan tesis ini.
2. Bapak Prof Dr. Ir John Haluan, M.Sc selaku penguji tamu atas saran dan
koreksi serta kerjasama yang baik selama ujian berlansung.
3. Suamiku : J.P Sidabutar untuk segala pengertian dan kasihnya, kedua
orang tuaku atas pengorbananya yang besar serta kakak dan adek-adekku.
4. Bapak Bambang dan pegawai PPS Cilacap atas kerjasamanya selama
melakukan pengambilan data.
5. Sahabat-sahabatkuku : Ria, Mbak Risti, Erin, Donwil, Ika, Mbak Lia, Aan
RIWAYAT HIDUP
Penulis dilahirkan di Parlilitan, 30 Januari 1977, sebagai anak kedua dari
empat bersaudara dari pasangan Pdt J. M. Manullang, MTh dan J. Br
Simanungkalit. Pendidikan Sekolah Dasar, Sekolah Menengah Pertama, dan
Sekolah Menengah Atas ditempuh di Pematang Siantar masing- masing di SD
Methodist Pematang Siantar, SMP Negeri 1 Pematang Siantar, dan SMA Negeri 4
Pematang Siantar. Pendidikan Sarjana ditempuh di Program Studi Pemanfaatan
Sumber Daya Perairan Fakultas Perikanan Universitas Riau pada tahun 1995 dan
lulus pada tahun 2000. Pada tahun 2001 penulis diterima di Program Studi
Teknologi Kelautan pada Sekolah Pascasarjana Institut Pertanian Bogor atas biaya
KAJIAN STABILITAS OPERASIONAL
KAPAL
LONGLINE
60 GT
SHANTY L. MANULLANG
SEKOLAH PASCASARJANA
INSTITUT PERTANIAN BOGOR
PERNYATAAN MENGENAI TESIS DAN SUMBER INFORMASI
Dengan ini saya menyatakan bahwa tesis Kajian Stabilitas Operasional
Kapal Longline 60 GT adalah karya saya sendiri dengan arahan komisi
pembimbing dan belum diajukan dalam bentuk apapun kepada perguruan tinggi mana pun. Sumber informasi yang berasal atau dikutip dari karya yang diterbitkan dari penulis lain telah disebutkan dalam teks dan dicantumkan dalam Daftar Pustaka di bagian akhir tesis ini.
Bogor, Juli 2008
RINGKASAN
SHANTY L. MANULLANG. Kajian Stabilitas Operasional Kapal Longline 60 GT. Dibimbing oleh JAMES P. PANJAITAN dan BONAR P. PASARIBU.
Stabilitas suatu kapal baik kapal niaga maupun kapal perikanan sangat perlu diutamakan agar operator kapal dapat memperhitungkan bagaimana kondisi stabilitas kapal yang akan dioperasikan.
Oleh karena itu didalam penelitian ini dilakukan perhitungan untuk
mengetahui tentang stabilitas operasional kapal longline dimana parameter stabilitas ini dapat dilihat dari bentuk geometri kapal ketika berlayar di laut.
Penelitian ini dilakukan dengan cara menganalisis stabilitas operasional kapal dengan menganalisa kurva stabilitas GZ yang dibandingkan dengan standar yang ada. Hasil perhitungan stabilitas kemudian dibandingkan dengan standar
stabilitas kapal yang dikeluarkan oleh United Kingdom Regulation [The Fishing
Vessels (Safety Provision) Rules, 1975] (Hind, 1982) dan International Maritime Organization (IMO) pada Torremolinos International Convention for The Safety of Fishing Vessels-regulation 28 (1977) melalui kurva GZ.
Hasil yang diperoleh menunjukkan bahwa pada tinggi gelombang 1 meter kondisi yang aman bagi kapal longline 60 GT ini untuk melakukan operasi penangkapan yaitu pada draft 1. 54m (KG kapal 2.2m), draft 1.8m (KG kapal 2.15m dan KG 2.2m), draft 2.0m (KG kapal 2.1m dan KG 2.15m) and draft 2.2 (KG kapal 2.07m dan KG 2.1m). Untuk tinggi gelombang 1.5 meter kondisi yang aman bagi kapal ini untuk melakukan operasi penangkapan adalah pada draft 1.54m (KG kapal 2.15m), draft 1.8m (KG kapal 2.2m), draft 2.0m (KG kapal 2.15m dan KG kapal 2.2m), draft 2.2m (KG kapal 2.1m dan KG kapal 2.15m), sedangkan untuk tinggi gelombang 2 meter kondisi yang aman dalam melakukan operasi penangkapan adalah pada draft 2.0m (KG kapal 2.15m dan K G kapal 2.2m), draft 2.2m (KG kapal 2.15m).
ABSTRACT
SHANTY L. MANULLANG. A study on The Operational Stability of Longliner 60 GT. Supervised by JAMES P. PANJAITAN and BONAR P. PASARIBU.
A study was conducted to examine the operasional stability of a tuna longline sized 60 GT. The righting arm of a ship is the primary measurement used to evaluate a fishing vessel’s stability. The righting arm curve is calculated from the center of gravity and center of buoyancy at a series of fixed heel angles. In this research the righting arm are calculated. The criteria of stability are from IMO. The result indicated that the change of draught can make the vessel unstably.
The best condition for tuna longliner 60 GT to operation in safety is in draught 1.54m (KG 2.2m), draught 1.8m (KG 2.15m and KG 2.2m), draught 2.0m (KG 2.1m and KG 2.15m) and draught 2.2 (KG 2.07m and KG 2.1m) for 1 meter in wave height, for 1.5 meter in wave height the best condition in draught 1.54m (KG 2.15m), draught 1.8m (KG 2.2m), draught 2.0m (KG 2.15m and KG 2.2m), draught 2.2m (KG 2.1m and KG 2.15m),and for 2 meter the best condition to operate the vessel is in draught 2.0m (KG 2.15m and KG 2.2m), draught 2.2m (KG 2.15m). We also used statistical method to analyze the effect of the changing of draught.
© Hak cipta milik Institut Pertanian Bogor, tahun 2008 Hak cipta dilindungi Undang-undang
1. Dilarang mengutip sebagian atau seluruh karya tulis ini
tanpa mencantumkan atau menyebutkan sumber pengutipan hanya untuk kepentingan pendidikan,
penelitian, penulisan karya ilmiah, penyusunan laporan, penulisan kritik atau tinjauan suatu masalah
2. Dilarang mengumumkan dan memperbanyak sebagian
KAJIAN STABILITAS OPERASIONAL KAPAL LONGLINE 60 GT
SHANTY L. MANULLANG
Tesis
Sebagai salah satu syarat untuk memperoleh gelar Mangister pada
Departemen Pemanfaatan Sumberdaya Perikanan
SEKOLAH PASCASARJANA INSTITUT PERTANIAN BOGOR
PRAKATA
Puji syukur penulis panjatkan kehadirat Allah Bapa atas kasih dan karunia-Nya, akhirnya karya ilmiai ini berhasil diselesaikan. Karya ilmiah deang judul ” Kajian Stabilitas Operasional Kapal Longline 60 GT ” disusun sebagai salah satu syarat untuk memeperoleh gelar Magister Sains pada Institut Pertanian Bogor.
Pada kesempatan ini penulis ingin mengucapkan terima kasih dan penghargaan yang tulus kepada :
1. Bapak Dr. Ir. James P. Panjaiatan , M.Phill dan Bapak Prof . Dr. Ir. Bonar
P. Pasaribu M.Sc selaku pembimbing yang telah beredia meluangkan waktu sewrta penuh kesabaran telah membimbing dan mengarahkan penulis semenjak pengumpulan data, pengolahan hingga penyelesaian penulisan tesis ini.
2. Bapak Prof Dr. Ir John Haluan, M.Sc selaku penguji tamu atas saran dan
koreksi serta kerjasama yang baik selama ujian berlansung.
3. Suamiku : J.P Sidabutar untuk segala pengertian dan kasihnya, kedua
orang tuaku atas pengorbananya yang besar serta kakak dan adek-adekku.
4. Bapak Bambang dan pegawai PPS Cilacap atas kerjasamanya selama
melakukan pengambilan data.
5. Sahabat-sahabatkuku : Ria, Mbak Risti, Erin, Donwil, Ika, Mbak Lia, Aan
RIWAYAT HIDUP
Penulis dilahirkan di Parlilitan, 30 Januari 1977, sebagai anak kedua dari
empat bersaudara dari pasangan Pdt J. M. Manullang, MTh dan J. Br
Simanungkalit. Pendidikan Sekolah Dasar, Sekolah Menengah Pertama, dan
Sekolah Menengah Atas ditempuh di Pematang Siantar masing- masing di SD
Methodist Pematang Siantar, SMP Negeri 1 Pematang Siantar, dan SMA Negeri 4
Pematang Siantar. Pendidikan Sarjana ditempuh di Program Studi Pemanfaatan
Sumber Daya Perairan Fakultas Perikanan Universitas Riau pada tahun 1995 dan
lulus pada tahun 2000. Pada tahun 2001 penulis diterima di Program Studi
Teknologi Kelautan pada Sekolah Pascasarjana Institut Pertanian Bogor atas biaya
TERMINOLOGI
After perpendicular (garis tegak buritan,AP) : Garis tegak yang ditarik melalui titik perpotongan antara sisi belakng linggi kemudi (titik tengah poros kemudi apabila tidak terdapat linggi kemudi) dan tegak lurus dengan garis dasar.
Breadth (B) (meter) : Lebar terlebar kapal dan umumnya terdapat pada bagian midship.
Coefficient of block (Cb) : perbandingan antara volume badan kapal yang berada di bawah permukaan air dengan volume balok yang dibentuk oleh panjang, lebar dan tinggi balok.
Coefficient of prismatic (Cp) : perbandingan antara volume badan kapal yang berada di bawah permukaan air dengan volume prisma yang dibentuk oleh luasan penampang gading besar dan panjang prisma
Coefficient of waterplane (Cw): perbandingan antara luas penampang garis air dengan luas empat persegi panjang yang dibetuk oleh panjang dan lebar segi empat.
Coefficient of vertical prismatic (Cvp) : perbandingan antara volume badan kapal yang berada di bawah permukaan air dengan volume prisma yang dibentuk oleh luasan penampang garis air tinggi prisma.
Coefficient of midship (CÄ): perbandingan antara luas penampang gading besar yang berada dibawah permukaan air dengan luas empat persegi panjang yang dibentuk oleh pankang dan lebar segi empat.
Centre of buoyancy (B) : titik khayal yang merupakan pusat seluruh gaya apung pada kapal yang bekerja vertikal ke atas. Posisi titik ini, berdasarkan
jaraknya dari tengah kapal, atau dari Fore Perpendicular (FP) atau dari
After Perpendicular (AP) disebut Longitudinal Centre of Buoyancy (LCB)
dan dari base line atau kneel disebut Vertical Centre of Buoyancy (VCB).
Centre of Gravity : titik khayal yang merupakan pusat seluruh gaya berat pada kapal yang bekerja vertikal ke bawah. Jarak titik berat tersebut diukur.
Depth (D) (meter): tinggi kapal yang diukur dari badan kapal terbawah hingga dek terendah dan umumnya tepat di bagian midship.
Draft (sarat air kapal, d) (meter): jarak vertikal antara garis dasar sampai dengan garis air muatan penuh yang diukur pada pertengahan panjang garis tegak kapal.
Fore perpendicular (garis tegak haluan FP): garis tegak yang ditarik melalui perpotongan antara linggi haluan dengan garis air muatan penuh dan tegak
lurus dengan garis dasar (base line).
Gravity (g) (m/det2): percepatan gravitasi bumi (9.8 m/det2).
Length over all (LOA) (meter): jarak mendatar antara ujung depan linggi haluan sampai dengan ujung belakang linggi buritan kapal.
Length of perpendicular ( L PP) (meter): panjang badan kapal antara dua garis
tegak AP (After Perpendicular) dan FP (Fore Perpendicular).
Longitudinal Centre of Buoyancy (LCB) (meter): jarak maya dimana titik pusat daya apung (B) vertikal berada.
Metacentre (M): titik khayal yang merupakan titik potong dari garis khayal yang melalui titik B dan titik G saat kapal berada pada posisi tegak dengan garis khayal yang melalui titik tersebut saat kapal berada pada posisi miring akibat bekerjanya gaya-gaya pada kapal.
Midship (Ä): bagian tengah kapal.
Periode gelombang (T) (detik): waktu yang dibutukan untuk lewatnya dua puncak atau dua lembah gelombang yang berurutan.
Tinggi gelombang (H) (meter) jarak vertikal suatu titik di puncak gelombang terhadap suatu titik di lembah gelombang.
Ton displacement (D) (ton): berat badan kapal yang terendam dalam air.
Vanishing angle : sudut kemiringan kapal paling miring dimana kapal berada
dalam posisi antara colapse atau kembali keposisi semula
Vanishing stability : sudut stabilitas kapal ketika berada dalam tanpa adanya pengaruh lengan pengembali yang mengakibatkan kapal tenggelam.
DAFTAR ISI
Halaman
DAFTAR TABEL ... x DAFTAR GAMBAR ... xii DAFTAR LAMPIRAN ... xiv
1 PENDAHULUAN ... 1 1.1 Latar Belakang ... 1 1.2 Perumusan Masalah ... 2 1.3 Tujuan dan Manfaat Penelitian ... 2 1.4 Hipotesis ... 2
2 TINJAUAN PUSTAKA ... 3 2.1 Kapal Longline ... 3 2.1.1 Stabilitas kapal ... 4 2.1.2 Kurva stabilitas GZ ... 7 2.1.3 Kriteria stabilitas ... 8 2.2 Gelombang Laut ... 9 2.3 Teori Strip ... 11
3. METODE PENELITIAN ... 13 3.1 Waktu dan Tempat Penelitian ... 13 3.2 Alat dan Bahan ... 13 3.3 Metode Penelitian ... 13 3.3.1 Jenis data ... 13 3.3.2 Pengumpulan data ... 13 3.4 Pengolahan dan Analisis Data ... 14 3.4.1 Menghitung nilai hidrostatik kapal longline 60 GT ... 14
3.4.2 Komputasi stabilitas operasional kapal longline 60 GT ... 16
3.4.3 Data gelombang laut ... 17 3.4.4 Perhitungan statistik ... 17
4 HASIL DAN PEMBAHASAN ... 20 4.1 Dimensi Utama Kapal Longline ... 20 4.1.1 Parameter hidrostatik ... 22 4.2 Posisi Titik G Kapal Longline 60 GT ... 29 4.3 Stabilitas Operasional Kapal Longline 60 GT ... 31 4.4 Periode Oleng Kapal Longline 60 GT ... 50 4.5 Perhitungan Statistik ... 54
5 KESIMPULAN DAN SARAN ... 55 5.1 Kesimpulan ... 55 5.2 Saran ... 55 DAFTAR PUSTAKA ... 56 LAMPIRAN ... 59
DAFTAR TABEL
Halaman
1 Nilai acuan coefficient of fineness kapal longline ... 4
2 Dimensi utama kapal longline yang diteliti ... 20
3 Rasio dimensi utama kapal longline yang diteliti ... 20
4 Besaran parameter hidrostatik kapal longline pada tiap-tiap water
line ... 22
5 Kondisi kapal longline 60 GT pada saat kosong ... 29
6 Kondisi kapal longline 60 GT pada saat setengah penuh ... 29
7 Kondisi kapal longline 60 GT pada saat penuh ... 30
8 Nilai KG kapal longline pada tiga kondisi distribusi muatan
kapal ... 31
9 Stabilitas kapal longline pada draft 1.54m menurut standar IMO
pada tinggi gelombang 1 meter ... 33
10 Stabilitas kapal longline pada draft 1.8m menurut standar IMO
pada tinggi gelombang 1 meter... 35
11 Stabilitas kapal longline pada draft 2.0m menurut standar IMO
pada tinggi gelombang 1 meter... 36
12 Stabilitas kapal longline pada draft 2.2m menurut standar IMO
pada tinggi gelombang 1 meter... 38
13 Stabilitas kapal longline pada draft 1.54m menurut standar IMO
pada tinggi gelombang 1.5 meter... 40
14 Stabilitas kapal longline pada draft 1.8m menurut standar IMO
pada tinggi gelombang 1.5 meter... 41
15 Stabilitas kapal longline pada draft 2.0m menurut standar IMO
pada tinggi gelombang 1.5 meter... 43
16 Stabilitas kapal longline pada draft 2.2m menurut standar IMO
pada tinggi gelombang 1.5 meter... 44
17 Stabilitas kapal longline pada draft 1.54m menurut standar IMO
pada tinggi gelombang 2 meter... 45
18 Stabilitas kapal longline pada draft 1.8m menurut standar IMO
pada tinggi gelombang 2 meter... 47
19 Stabilitas kapal longline pada draft 2.0m menurut standar IMO
pada tinggi gelombang 2 meter... 48
20 Stabilitas kapal longline pada draft 2.2m menurut standar IMO
pada tinggi gelombang 2 meter... 49
21 Periode oleng kapal pada draft 1.54 meter... 50
22 Periode oleng kapal pada draft 1.8 meter... 51 23 Periode oleng kapal pada draft 2.0 meter... 51 24 Periode oleng kapal pada draft 2.2 meter... 51
25 Hubungan antara perubahan nilai KG kapal longline terhadap
periode oleng kapal pada draft 1.54 meter... 51
26 Hubungan antara perubahan nilai KG kapal longline terhadap
periode oleng kapal pada draft 1.8 meter... 51
27 Hubungan antara perubahan nilai KG kapal longline terhadap
periode oleng kapal pada draft 2.0 meter... 52
28 Hubungan antara perubahan nilai KG kapal longline terhadap
periode oleng kapal pada draft 2.2 m ... 53
29 Hasil perhitungan chi square terhadap perbadingan kapal longline
... 54
DAFTAR GAMBAR
Halaman
1. Possisi titik G, B, dan M pada Midship kapal (Hind, 1982) ... 5
2. Kurva kriteria stabiltas kapal menurut kurva GZ ... 9
3. Karakteristik gelombang reguler (battacahrya, 1988) ... 11
4. Bentuk strip dari bagian hull yang berada di bawah air dengan
menggunakan infinitif silinder... 12
5. Flow chart rancangan penelitian ... 19
6. Kurva hidrostatik kapal longline 60 GT ... 25
7. Body plan dan rancangan kapal longline 60 GT ... 26
8. Rancangan umum kapal longline 60 GT ... 27
9. Posisi ABK pada saat setting dan hauling ... 28
10. Kurva stabilitas GZ kapal longline 60 GT pada 3 distribusi
muatan... 32
11. Kurva stabilitas GZ kapal longline pada tinggi gelombang 1
meter dengan draft 1.54 meter ... 33
12. Kurva satbilitas GZ kapal longline pada tinggi gelombang 1
meter dengan draft 1.8 meter ... 34
13. Kurva stabilitas GZ kapal longline pada tinggi gelombang 1
meter dengan draft 2.0 meter ... 36
14. Kurva stabilitas GZ kapal longline pada tinggi gelombang 1
meter dengan draft 2.2 meter ... 37
15. Kurva stabilitas GZ kapal longline pada tinggi gelombang 1.5
meter dengan draft 1.54 meter ... 39
16. Kurva stabilitas GZ kapal longline pada tinggi gelombang 1.5
meter dengan draft 1.8 meter ... 41
17. Kurva stabilitas GZ kapal longline pada tinggi gelombang 1.5
meter dengan draft 2.0 meter ... 42
18. Kurva stabilitas GZ kapal longline pada tinggi gelombang 1.5
meter dengan draft 2.2 meter ... 43
19. Kurva stabilitas GZ kapal longline pada tinggi gelombang 2
meter dengan draft 1.54 meter ... 45
20. Kurva stabilitas GZ kapal longline pada tinggi gelombang 2
meter dengan draft 1.8 meter ... 46
21. Kurva stabilitas GZ kapal longline pada tinggi gelombang 2
meter dengan draft 2.0 meter ... 47
22. Kurva stabilitas GZ kapal longline pada tinggi gelombang 2
meter dengan draft 2.2 meter ... 49
23. Grafik hubungan antara GM kapal terhadap periode olengnya
pada draft 1.54 meter ... 52
24. Grafik hubungan antara GM kapal terhadap periode olengnya
pada draft 1.8 meter ... 52
25. Grafik hubungan antara GM kapal terhadap periode olengnya
pada draft 2.0 meter ... 53
26. Grafik hubungan antara GM kapal terhadap periode olengnya
pada draft 2.2 meter ... 53
DAFTAR LAMPIRAN
Halaman
1 Gambar kapal longline 60 GT... 59
2 Peta cruise kapal Umitakamaru di perairan selatan pulau Jawa ... 60
3 Nilai stabilitas kapal longline 60 GT ... 61
4 Data kurva GZ dengan KG 2.3m pada panjang gelombang 1m,
1.5m dan 2m ... 62
5 Uji Chi Square pada draft 1.54m ; draft 2.0m... 64
6 Uji Chi square pada draft 1.54m ; draft 2.2m ... 65
7 Uji Chi Square pada draft 1.8m ; draft 1.54m ... 66
8 Uji Chi Square pada draft 1.8m ; draft 2.0m ... 67
9 Uji Chi Square pada draft 1.8m ; draft 2.2m ... 68
10 Uji Chi Square pada draft 2.0m ; draft 2.2m ... 69
1
PENDAHULUAN
1.1 Latar Belakang
Perairan Selatan Jawa adalah perairan yang merupakan bagian dari
Samudera Hindia. Menurut Hutabarat dan Stewart (1985) letak samudera Hindia sama sekali tertutup oleh masa daratan benua sehingga sifat pemanasan dan pendinginan daratan benua dapat menyebabkan terjadinya perubahan musim. Perairan Selatan Jawa sangat dipengaruhi oleh sistem angin monson yang berubah arah dua kali dalam setahun (Wyrtki 1961).
Pada bulan November, perairan ini dipengaruhi oleh angin musim dari tenggara, mencapai puncaknya pada bulan Juni-Agustus dan disebut sebagai musim timur karena angin bertiup dari timur ke barat. Sedangkan pada bulan Desember sampai April dipengaruhi oleh angin monson dari barat laut dan mencapai puncaknya pada bulan Desember – Februari, disebut dengan angin musim barat karena angin bertiup dari barat ke timur. Bulan Maret – Mei dan September – November disebut sebagai musim peralihan (pancaroba), dimana
pada musim ini angin bertiup tidak menentu (Nontji 1987).
Perubahan musim sangat berpengaruh terhadap kegiatan perikanan. Kapal pada saat dioperasikan harus sanggup mengapung di permukaan air dengan stabilitas yang baik, bergerak dengan kecepatan yang bervariasi, berolah gerak yang baik serta cukup kuat untuk bertahan terhadap gelombang pada saat cuaca
buruk. Dengan demikian tetap selamat (survive) dalam segala bahaya di laut.
Bahaya di laut yang dimaksud adalah tubrukan, kandas, kondisi ekstrim seperti gelombang yang sangat kuat dan efek yang lain yang berkaitan dengan cuaca yang buruk.
Oleh karena itu didalam kajian ini dilakukan suatu penelahaan tentang stabilitas operasional kapal longline dimana parameter stabilitas ini dapat dilihat dari bentuk geometri kapal ketika berlayar di laut.
1.2 Perumusan Masalah
Pada penelitian di satuan penjaga pantai di Amerika menemukan bahwa kapal longline adalah salah satu kapal perikanan yang banyak mengalami kecelakaan pada tahun 1998 (Cristoper Roberts 2002). Di Indonesia kapal
longline umumnya dioperasikan untuk menangkap ikan Tuna. Ikan Tuna
merupakan hasil tangkapan unggulan perikanan yang menjadi penopang industri perikanan Indonesia, yang menempati urutan ke dua setelah udang (BPPL 1988).
Pengoperasian suatu kapal longline diharapkan memperhitungkan kondisi stabilitas operasi agar supaya terhindar dari musibah yang terjadi di laut.
1.3 Tujuan dan Manfaat Penelitian
Agar tercapai pemecahan masalah sesuai dengan latar belakang dan perumusan masalah maka penelitian ini bertujuan untuk :
1. Mengetahui nilai KG pada saat kapal dioperasikan
2. Menganalisis kurva GZ pada draft dan KG kapal saat dioperasikan
3. Menganalisis kelayakan stabilitas statis kapal yang diteliti
4. Menguji secara statistik kondisi stabilitas kapal.
Dengan demikian penelitian ini diharapkan dapat memberikan manfaat bagi
1. Operator kapal longline agar sesuai dengan pengoperasiannya.
2. Penelitian sebagai salah satu bahan pustaka
1.4 Hipotesis
Adanya pengaruh perubahan draft kapal terhadap stabilitas operasional
2 TINJAUAN PUSTAKA
2.1 Kapal Longline
Nomura dan Yamazaki (1975) mengemukakan beberapa persyaratan teknis minimal dari kapal ikan yang berfungsi untuk operasi penangkapan, yakni :
1. Memiliki struktur badan kapal yang kuat
2. Menunjang keberhasilan operasi penangkapan
3. Memiliki stabilitas yang tinggi
4. Memiliki fasilitas penyimpanan hasil tangkapan ikan
Salah satu keistimewaan kapal ikan dibandingkan dengan kapal lainnya adalah memiliki kelaiklautan, dimana laiklaut berperan d a l a m operasi penangkapan ikan dan cukup tahan untuk menghadang terpaan angin, gelombang, stabilitas yang tinggi untuk menjamin keselamatan dalam pelayaran.
Kapal longline dibangun sesuai dengan kontruksi yang diserasikan dengan bentuk, cara penggunaan alat tangkap dan daerah penangkapan dimana kapal tersebut akan dioperasikan. Kapal ini mudah dikenali dari bentuknya yang mirip kapal perang, ditandai dengan gudang tempat alat tangkap di bagian buritan, mempunyai dek bawah di bagian depan dari bagian tengah (Simorangkir 1993 diacu dalam Ardani 1995).
Inamura (1968) menyatakan perbandingan nilai dimensi kapal yang dapat mempengaruhi karakteristik bentuk kapal itu sendiri seperti :
1. Nilai rasio L/B berpengaruh terhadap tahanan gerak kapal, semakin kecil nilai
rasio ini akan berakibat buruk terhadap kecepatan
2. Nilai rasio L/D berpengaruh terhadap kekuatan memanjang kapal, semakin
besar nilai rasio ini mengakibatkan kekuatan memanjang akan melemah
3. Nilai rasio B/D berpengaruh terhadap stabilitas kapal, semakin besar nilai
rasio ini mengakibatkan stabilitas kapal lebih baik tetapi propulsive abilitynya
akan memburuk.
Tabel 1 di bawah ini menjelaskan nilai kisaran koefisien bentuk (coefficient
Tabel.1 Nilai acuan coefficient of fineness kapal longline
Coefficient of Finenes Nilai Acuan
Cb 0.61 – 0,72
Cp 0,65 – 0,75
CÄ 0,88 – 0.98
Cw 0,83 – 0,90
Cvp 0,84 – 0,96
Sumber Inamura (1968), dikutip Ayodhyoa (1972).
Lebih lanjut Fyson (1985) menjelaskan,bahwa untuk pembangunan kapal
dibutuhkan suatu kurva dimana nilai dari berbagai data hidrostastik digambarkan
sebagai fungsi dari draft kapal, k u r v a i n i biasanya disebut dengan kurva
hidrostatik. Kurva ini mengindikasikan beberapa parameter penting untuk perhitungan yang terkait dengan kondisi muatan dan stabilitas sebuah kapal.
2.1.1 Stabilitas kapal
Stabilitas kapal diartikan sebagai kemampuan kapal untuk kembali ke posisi semula setelah mengalami gaya, baik gaya dari luar maupun gaya dari dalam kapal itu sendiri yang menyebabkan kapal mengalami oleng. Stabilitas kapal yang baik merupakan salah satu syarat penting bagi kapal dalam menunjang keberhasilan operasi penangkapan ikan yang dilakukannya.
Stabilitas kapal dibagi dalam stabilitas statis dan stabilitas dinamis.
Stabilitas statis (statical stability) adalah stabilitas kapal yang diukur pada kondisi
air tenang (kapal tidak mengalami pengaruh dari luar seperti angin dan
gelombang) dengan beberapa sudut keolengan pada nilai ton displacement yang
berbeda. Nilai stabilitas statis kapal ditunjukkan oleh nilai lengan penegak (GZ).
Stabilitas dinamis(dynamic stability) adalah stabilitas kapal yang diukur
dengan jalan memberikan suatu “usaha” pada kapal sehingga membentuk sudut keolengan tertentu (Hind 1982).
Taylor (1977) dan Hind (1982) menyatakan stabilitas pada sebuah kapal dipengaruhi oleh titik-titik konsentrasi dari gaya-gaya yang bekerja pada kapal.
Titik pertama adalah titik apung B (center of buoyancy) yakni titik khayal yang
merupakan pusat seluruh gaya apung pada kapal yang bekerja secara vertikal ke
merupakan pusat seluruh gaya berat pada kapal yang bekerja secara vertikal ke bawah.
Titik ketiga adalah titik M (metacenter) yakni titik khayal yang merupakan
titik potong yang melalui titik apung B dan titik berat G saat berada pada posisi tegak dengan garis khayal yang melalui ke dua titik tersebut pada saat kapal berada pada posisi miring akibat bekerjanya gaya-gaya pada kapal. Titik M juga merupakan titik tertinggi maksimum bagi titik G. Posisi titik berat G, titik apung B dan titik M tersebut diilustrasikan pada Gambar 1.
Gambar 1. Posisi titik G, B dan M pada midship kapal (Hind, 1982).
Nomura dan Yamazaki (1975) menyatakan bahwa syarat penting yang harus dipenuhi supaya kapal tetap dalam keadaan seimbang didalam air adalah titik apung B harus terletak pada satu garis lurus dengan titik berat G dan titik berat G
harus berada di bawah titik metacenter, selanjutnya Hind (1982) mengemukakan
posisi titik berat G bergantung pada distribusi muatan dan posisi titik apung B bergantung pada bentuk geometri badan kapal yang terendam di dalam air.
Keseimbangan sebuah kapal yang berada dalam air pada dasarnya terdiri
dari tiga jenis, yaitu: (1) keseimbangan stabil (stable equilibrium), (2)
keseimbangan tidak stabil (unstable equilibrium) dan ( 3 ) keseimbangan netral
(neural equilibrium). Ketiga kondisi t e sebut dipengaruhi oleh kondisi gaya yang bekerja pada kapal, baik itu gaya apung maupun gaya berat yang bekerja dengan arah yang berlawanan.
w
G Z B
B1
K
w W
W1 L1
L M
(1) Keseimbangan stabil (stable equilibrium) adalah kondisi keseimbangan sebuah kapal dimana kapal kembali ke posisi tegak setelah gaya y a ng bekerja pada kapal menyebabkan kapal menjadi miring. Kondisi ini dapat terjadi apabila titik pusat gravitasi (G) berada dibawah titik metasenter (M) atau kapal memiliki metasenter positif dan lengan penegak (GZ) positif juga, yang dapat mengembalikan kapal ke posisi semula.
(2) Keseimbangan tidak stabil (unstable equilibrium) adalah suatu kondisi
keseimbangan sebuah kapal dimana kapal menjadi miring akibat gaya yang bekerja pada kapal sehingga kapal tidak kembali ke posisi awalnya melainkan terus kearah kemiringan tersebut. Hal ini dapat terjadi apabila titik pusat gravitasi (G) lebih tinggi dari titik metasenter (M) atau kapal memiliki tinggi metasenter (GM) negatif dan lengan penegak (GZ) negatif yang meneruskan gerak ke arah keolengan kapal.
(3) Keseimbangan netral (neural equilibrium) adalah suatu kondisi
keseimbangan sebuah kapal dimana kapal menjadi miring akibat gaya yang bekerja pada kapal dan kondisi ini tetap demikian. Pada kondisi ini lengan penegak GZ tidak dihasilkan. Kapal tidak kembali keposisi semula dan tidak juga terus ke arah kemiringannya. Kondisi ini terjadi apabila titik pusat gravitasi (G) dan metasenter (M) berhimpit dalam satu titik. Kemiringan
yang tetap ini dinamakan list.
Dalam kaitan dengan kecepatan kapal, Fyson (1985), mengemukakan bahwa panjang kapal berbanding terbalik dengan kecepatan kapal. Hal ini diformulasikan
dengan bilangan Froude kapal yaitu
v Fn = Ö g.L
dimana v = kecepatan kapal (m/det) L = Panjang Kapal (m)
Untuk kapal ikan bilangan Froude antara 0.30 – 0.36
Menurut Kok et al (1983), selama kapal berada di laut akan mendapat
sejumlah gaya yang terdiri dari :
1. Berat kapal dan muatan
3. Pengaruh gelombang dan tekanan air
4. Gaya-gaya dari massa yang bekerja pada kapal
5. Pembagian muatan asimetris
6. Gaya-gaya torsi yang disebabkan oleh tidak samanya waktu oleng bagian
depan dan bagian belakang
7. Gaya-gaya beban kemudi
Hind (1982) menyatakan ada beberapa persyaratan agar kapal berada pada posisi keseimbangan, yaitu :
1. Besarnya gaya apung sama dengan besarnya gaya berat kapal
2. Pusat gaya apung terletak pada satu garis lurus dengan pusat gaya berat kapal
3. Titik berat kapal (G) harus berada di bawah titik metasenter (M)
2.1.2 Kurva stabilitas GZ
Fyson (1985) menjelaskan bahwa pembahasan mengenai stabilitas kapal terkait erat dengan perhitungan nilai GZ (lengan pengembali/kopel) pada kapal. Hal ini merupakan bagian yang sangat penting dalam penentuan stabilitas kapal.
Rawson dan Tupper (1983) menjelaskan, untuk aplikasi praktis, adalah perlu untuk menyajikan stabilitas dalam bentuk momen pengembali/kopel yang dihasilkan dari titik pusat gravitasi pada saat kapal menjadi miring dengan perubahan berat yang konstan, yang biasanya disajikan dalam bentuk kurva stabilitas GZ.
Fyson (1985) menambahkan bahwa syarat untuk kestabilan sebuah kapal sangat terkait erat dengan pembahasan tentang kurva stabilitas GZ, dalam arti pencegahan air masuk ke dalam kapal. Kurva ini menunjukkan hubungan antara
lengan pengembali (GZ) pada berbagai variasi sudut kemiringan dengan
perubahan berat yang konstan (constan displacement).
Perhitungan nilai lengan penegak (GZ) dan distribusi muatan terkait erat dengan stabilitas sebuah kapal. Perbedaan distribusi muatan yang terjadi pada setiap kondisi pemuatan akan mengakibatkan terjadinya perubahan nilai KG, yaitu
jarak vertikal antara titik K (keel) d engan titik berat G yang selanjutnya akan
nilai-nilai yang berpengaruh terhadap keselamatan kapal adalah GM kapal, vanishing angle dan stabilitas dinamis.
Rawson dan Tupper (1983) memberikan penjelasan tentang kurva GZ yang meliputi :
1. Kemiringan pada titik awal. Nilai lengan pengembali untuk sudut
kemiringan yang kecil adalah proporsional terhadap sudut kemiringan. Nilai
tangent GZ pada titik ini menggambarkan tinggi metacenter.
2. Nilai maksimum GZ, nilainya proporsional dengan momen terbesar yang
menyebabkan sudut kemiringan maksimum dimana kapal tidak tenggelam
3. Selang stabilitas (range of stability), yaitu selang dimana nilai GZ adalah
positif. Biasanya berada pada selang sudut oleng antara 0° sampai 90°
4. Sudut kemiringan pinggir dek kapal. Untuk sebagian besar bentuk kapal,
terdapat sebuah titik perubahan pada kurva dimana kurva berubah secara drastis pada sudut dimana bagian pinggir dek menjadi miring
5. Area di bawah kurva. Area ini menggambarkan kemampuan kapal untuk
menyerap energi yang diberikan oleh angin, gelombang dan gaya eksternal lainnya.
2.1.3 Kriteria stabilitas
Berbagai standar yang digunakan untuk menilai kelayakan kapal telah ditentukan oleh sebuah organisasi internasional di bawah organisasi dunia PBB
yaitu International Maritime Organization ( I M O ) . I M O mendeklarasikan
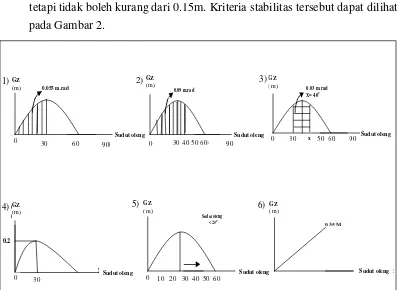
Torremolinos International Convention for The Safety of Fishibg Vessel – regulation 28 (1977) menetapkan kriteria stabilitas kapal dengan kurva tabilita GZ, yaitu :
1. Luasan area di bawah kurva stabilitas GZ dari sudut oleng 0° sampai sudut
oleng 30° tidak boleh kurang dari 0.055m.rad
2. Luasan area di bawah kurva stabilitas GZ dari sudut oleng 0° sampai susut
oleng x ( 40°) tidak boleh kurang dari 0.09m.rad
3. Luasan area antara sudut oleng 30° sampai sudut oleng x tidak boleh kurang
dari 0.03m.rad, dimana nilai x adalah 40° atau kurang sampai batas
4. Nilai maksimum GZ sebaiknya dicapai pada sudut oleng tidak kurang dari
30° dan bernilai minimum 0.20m
5. Sudut oleng maksimum stabilitas sebaiknya lebih dari 25°
6. Nilai metacentre awal (GM) tidak boleh kurang dari 0.35m untuk kapal
dengan dek tunggal. Pada kapal dengan superstructure yang lengkap atau
panjang kapal > 70m, GM dapat dikurangi untuk kelayakan administrasi tetapi tidak boleh kurang dari 0.15m. Kriteria stabilitas tersebut dapat dilihat pada Gambar 2.
Gambar 2 Kurva kriteria stabilitas kapal menurut kurva GZ (Sumber: Hind 19 82)
2.2 Gelombang Laut
Menurut IIPEN (1976) dan McLELAN (1975) gelombang terjadi pada batas dua media yang berlainan, misalnya pada batas air dan udara yang disebut
gelombang permukaan (surface wave), sedangkan gelombang yang terjadi pada
batas antara dua media air yang berlainan densitasnya disebut gelombang bawah
permukaan (internal wave). Gelombang permukaan disebabkan karena adanya
pengaruh angin.
Stabilitas operasional kapal banyak dipengaruhi oleh faktor lingkungan laut,
dimana gelombang laut adalah faktor beban luar yang paling dominan. Gelombang terdiri dari dua jenis yaitu gelombang yang karakteristiknya selalu
tetap disebut gelombang beraturan (regular) dan gelombang yang karakteristiknya
GZ (m) 60 0 30 90 0.055 m.rad Sudut oleng 0.2 GZ (m) 30
0 Sudut oleng
GZ
(m)
0 30 Sudut oleng
GZ
(m)
4)
30 60 90
0 GZ (m) 60 0 30 90 0.09 m.rad Sudut oleng 40 50
2) GZ
(m)
Sudut oleng
0 30 40 50 60 90
GZ (m) 60 0 30 90 0.03 m.rad X= 40o
Sudut oleng x 50
3) GZ
(m)
Sudut oleng
30 50 60 90
Sudut oleng 0 1) GZ (m) 60 0 20 Sudut oleng < 25o
Sudut oleng 50
30 40 10
5) GZ GZ
(m)
30 0 10 20 40 50 60
Sudut oleng
GM (m)
0.35 M
Sudut oleng
6) GZ
(m)
[image:38.595.114.512.200.490.2]selalu berubah- ubah disebut gelombang tidak beraturan (irreguler) (Djatmiko dan Murdijanto 1993). Gelombang dilaut umumnya adalah gelombang tidak beraturan (irreguler).
Llyod (1989), menyatakan pengunaan statistik memungkinkan untuk mempelajari tingkah laku gelombang di laut yang dapat juga menerangkan karakteristik gerakan sebuah kapal. Gelombang didefinisikan sebagai perubahan bentuk permukaan laut karena gerakan permukaan air.
Gelombang umumnya menimbulkan sebuah ayunan air yang bergerak tanpa henti-hentinya pada permukaan laut dan jarang dalam keadaan diam sama sekali. Hembusan angin sepoi-sepoi pada cuaca yang tenang sekalipun sudah cukup untuk dapat menimbulkan riak gelombang. Sebaliknya dalam keadaan dimana terjadi badai yang besar dapat menimbulkan suatu gelombang besar yang dapat mengakibatkan suatu kerusakan hebat pada kapal-kapal.
Seperti benda padat, air laut juga memiliki gerak translasi,rotasi dan osilasi
(Battacharya 1978). Gerakan translasi terjadi ketika air mengalir, gerakan rotasi
terjadi pada pusaran air dan gerakan osilasi merupakan penyimpangan bentuk dari
aliran air tersebut. Penyimpangan bentuk pada aliran air tersebut dikenal sebagai gelombang perairan. Secara ideal gelombang perairan merupakan sebuah kurva
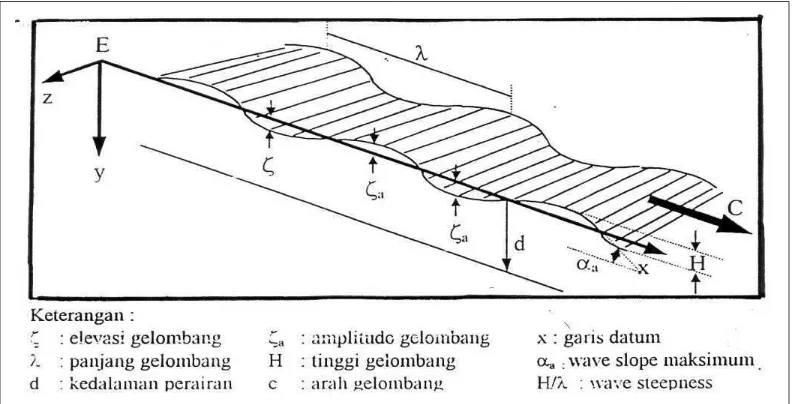
sinusoidal. Karakteristik gelombang tersebut menurut Llyod (1989) berdasarkan Gambar 3 adalah sebagai berikut :
1. Puncak gelombang (crest) adalah titik pada permukaan air yang berada pada
elevasi tertinggi
2. Lembah gelombang (trough) adalah titik pada permukaan air yang berada
pada elevasi terendah
3. Garis datum (x) adalah garis datar permukaan air (diambil secara statistik),
pada waktu air tenang
4. Elevasi gelombang (z) adalah jarak suatu titik pada permukaan gelombang dari garis datum, pada waktu tertentu.
5. Amplitudo gelombang (za) adalah jarak vertikal antara titik tertinggi (puncak)
atau titik terendah (lembah) dengan garis datum
6. Panjang Gelombang (l) adalah jarak dari suatu puncak gelombang dengan
7. Frekwensi gelombang (w) adalah banyaknya puncak atau lembah gelombang yang dilalui oleh suatu titik persatuan waktu.
Menurut Yamanouchi (1986) diacu dalam Iskandar B.H dan N. Umeda (2001) bahwa durasi gelombang laut aktual berkisar 1200 detik (20 menit). Pada waktu 1200 detik tersebut gerakan gelombang sudah dianggap stabil. Waktu durasi itu berlaku
untuk gelombang reguler dan iireguler.
[image:40.595.114.510.282.484.2]Heading pada kapal didefenisikan sebagai referensi untuk menunjukkan gaya pada perambatan gelombang (Llyod 1989 ).
Gambar 3. Karakteristik gelombang reguler (Lloyd (1989)).
2.3 Teori Strip
Metode strip umumnya dipakai untuk memprediksi bentuk seakeeping kapal
di laut, seperti halnya gerakan kapal, beban gelombang dan bertambahnya tahanan kapal pada gelombang. Metode strip secara luas digunakan sebagai sebuah metode prediksi, hal ini karena metode tersebut sesuai dengan pengukuran. Meskipun pada teori ini terdapat hal yang tidak konsisten jika dilihat dari sudut pandang secara teoritis (Kashiwagi M 1999 ).
Perhitungan gerakan kapal yang dilakukan dengan menggunakan teori strip
harus memenuhi syarat – syarat yang antara lain (Gerirtsma and
1. Badan kapal adalah slender yaitu dimana panjang kapal jauh lebih besar dari pada lebar dan saratnya, dan lebar kapal kecil dari pada panjang gelombang.
2. Badan kapal adalah rigid, sehingga tidak terjadi tekukan (defleksi) bila tidak
terjadi gaya angkat yang cukup.
3. Kapal memiliki kecepatan sedang, sehingga tidak terjadi gaya angkat yang
cukup besar.
4. Gerakan kapal yang terjadi adalah kecil.
5. Potongan melintang badan kapal adalah wall sided (tidak melengkung).
6. Kedalaman perairan lebih besar dibandingkan panjang gelombang, sehingga
perkiraan gelombang di perairan yang dalam dapat diterapkan.
7. Bentuk badan kapal tidak berpengaruh terhadap gelombang (sesuai dengan
hipotesis Froude Krylov)
Teori strip ditampilkan dalam bentuk tiga dimensi dari bentuk hull yang
berada di bawah air yang berbentuk strip seperti yang ditunjukkan Gambar 4.
Gambar 4. Bentuk trip dari bagian hull yang berada di bawah air dengan menggunakan infinitif silinder .
Setiap strip menjelaskan tentang bentuk hidrodinamika seperti added mass,
damping dan stiffnes yang menghasilkan koefisien untuk bentuk hull y a n g lengkap pada persamaan untuk gerakan. Teori strip mengasumsikan bahwa bentuk hidrodinamika lokal adalah sama jika bagian dari strip merupakan infinit silinder
III. METODE PENELITIAN
3.1 Waktu dan Tempat Penelitian
Pengukuran dimensi dan geometri bentuk kapal longline yang diteliti dilakukan di Cilacap pada bulan November. Setelah pengukuran dimensi d a n geometri bentuk selesai dilanjutkan dengan pengolahan data di Laboratorium Kapal Perikanan dan Navigasi Fakultas Perikanan dan Ilmu Kelautan, Institut Pertanian Bogor (IPB), pada bulan Desember 2003 – April 2004.
3.2 Alat dan Bahan
Didalam pengukuran dimensi dan geometri bentuk kapal longline ini digunakan alat meteran, kertas grafik dan alat tulis. Selanjutnya didalam pengolahan data diperlukan alat 1 unit personal computer (PC) dengan menggunakan program pengolahan data Microsoft Exel dan software perkapalan PGZ dan bahan yang digunakan dalam penelitian ini berupa data kapal longline
(data primer) dan data gelombang di perairan Selatan Jawa (data sekunder).
3.3 Metode Penelitian 3.3.1 Jenis data
Dari berbagai data kapal yang didapatkan maka dapat diuraikan seperti
(1) Data dimensi utama dan bentuk geometri kapal
(2) Data kondisi muatan kapal yang bervariasi
(3) Data draft kapal yang bervariasi
(4) Data tinggi gelombang laut
(5) Kurva stabilitas GZ kapal pada berbagai draft
3.3.2 Pengumpulan data 1. data kapal.
2. data gelombang.
Data gelombang laut dikumpulkan oleh Tim Survei Perairan Laut Dalam di Samudera Hindia dengan menggunakan kapal riset Umitakamaru. Alat pengukur yang dipakai Remote Wave Height Meter. Keakuratan alat ini untuk unit sensornya 3% dari pengukuran panjang gelombang. Alat ini dipasang di haluan kapal dengan sensor mengarah ke permukaan laut. Sensor memancarkan sinyal ke permukaan laut dan direkam kembali dari permukaan laut untuk dikirim ke kotak (connection box) kemudian diteruskan ke signal prosesor untuk mengubah sinyal menjadi bilangan biner dan dikonversikan ke bilangan desimal oleh prosesor komputer. Pada akhirnya dari hasil konversi prosesor akan didapatkan data-data gelombang laut yang digunakan dalam penelitian. Contoh data gelombang laut yang digunakan dalam penelitian ini seperti lampiran 1.
3.4 Pengolahan dan Analisis Data
Pengolahan data yang telah ditabulasikan dengan mengunakan perhitungan numerik dengan memanfaatkan kecangihan komputer. Adapun rumus-rumus yang dipergunakan dalam pengolahan data untuk mendapatkan kurva hidrostatis dari kapal longline ini sebagai berikut :
3.4.1 Menghitung nilai hidrostatik kapal longline 60 GT
(1) Water Plane Area (Aw), dengan Formula Simpson I :
Aw = h/3 (Y0+ 4 Y1 + 2Y2….. + 4 Yn + Yn+1)……... (m2) (1)
(2) Volume Displacement (Ñ), dengan formula Simpson I :
Ñ = h/3 (A0+ 4 A1 + 2A2….. + 4 An + An+1)………....(m3) (2)
(3) Weight Displacement (D) :
D = Ñ + d ……….…….…(ton) (3)
(4) Block Coefficient (Cb) :
Cb = …………..……… (4)
(5) Midship Coefficient (CÄ)
CÄ = …………..……… (5)
Ñ
(L x B xd)
AÄ
(6) Prismatic Coefficient (Cp) dan Vertical Prismatic Coefficient (Cvp) :
Cp = ………..……… (6)
Cvp = …………..……….……… (7)
(7) Waterplane Coefficient (Cw) :
Cw = …………..……… (8)
(8) Ton Per Centimeter Immersion (TPI) :
TPI = x 1,025 …………..………..………..….… (9)
(9) Jarak Titik Apung (KB) :
KB = 2,5xd- …………..………..….……(m) (10)
(10) Jarak Titik apung – Metacenter (BM)
BM = ……….... (m) (11)
(11) Jarak Metacenter (KM) :
KM = KB + BM ………..(m) (12)
(12) Jarak Titik Apung – Metacenter Longitudinal (BML) :
BML = ……….. (m) (13)
dimana:
I1 = x h3
(13) Jarak Metacenter Longitudinal (KML) :
KML = KB + BML ………...…(m) (14)
Ñ
(AÄ x L)
Ñ
(AW x d)
AW
(L x B)
AW 100
( )
1 3[
Ñ AW]
I Ñ I1 ÑS (y.s.n.n) - S (y.s.n)
S (y.s)
2 3
dimana :
L = panjang kapal (m)
B = lebar kapal (m)
d = sarat air (m)
AÄ = area pada bagian midship (m2)
3.4.2 Komputasi stabilitas operasional kapal longline 60 GT
Komputasi stabilitas opersional yang dilakukan pada kapal longline 60 GT adalah stabilitas statis dan dinamis. Stabilitas statis yaitu stabilitas yang dihitung pada kondisi dimana kapal dan perairan berada pada kondisi diam (statis). Stabilitas dinamis adalah stabilitas kapal yang diukur dengan jalan memberikan suatu usaha pada kapal hingga membentuk sudut keolengan tertentu. Nilai ini dinyatakan dalam luas area di bawah kurva stabilitas statis (Hind 1982 dan Derret 1990).
Perhitungan stabilitas kapal longline yang diteliti meliputi analisis terhadap perkiraan perubahan nilai KG pada tiga kondisi distribusi muatan, yaitu ; kondisi muatan kapal kosong, kondisi muatan kapal setengah penuh, dan kondisi kapal penuh. Ketiga kondisi distribusi muatan tersebut masing – masing dengan aumi dimana :
(1). Kondisi kapal kosong diasumsikan bahan bakar,umpan hidup dan muatan kosong (0%).
(2). Kondisi kapal setengah penuh; pada kondisi ini bahan bakar,umpan hidup diasumsikan penuh (100%), dan muatan kosong ( 0% ).
(3). Kondisi kapal penuh: pada kondisi ini bahan bakar diasumsikan setengah penuh ( 50% ), umpan 20 % dan muatan penuh (100%).
Perubahan nilai KG dihitung dengan membuat perkiraan perubahan jarak vertikal – horizontal pada setiap kondisi perubahan distribusi muatan. Nilai KG diperoleh dengan menggunakan formula berikut (Hind, 1982) :
KG = moment of z ………. (15)
z
dimana : z adalah moment vertical
Analisis stabilitas statis melalui kurva stabilitas statis GZ dilakukan dengan metode Attwod’s Formula (Hind, 1982). Metode ini menganalisis stabilitas kapal
pada sudut keolengan 0o – 9 0o. Hasil perhitungan stabilitas kemudian
Kingdom Regulation [The Fishing Vessels (Safety Provision) Rules, 1975] (Hind,
1 9 8 2 ) d a n International Maritime Organization (IMO) pada Torremolinos
International Convention for The Safety of Fishing Vessels-regulation 28 (1977) melalui kurva GZ.
Analisis nilai stabilitas dinamis kapal dilakukan dengan menghitung luas
area kurva di bawah kurva GZ stabilitas statis pada berbagai sudut keolengan (0o
– 9 0o). Hasil perhitungan tersebut kemudian diplotkan menjadi sebuah kurva
untuk stabilitas dinamis kapal.
Nilai GM yang diperoleh pada kurva GZ digunakan untuk menghitung periode oleng kapal. Formula yang digunakan adalah (IMO,1995) :
Tf = ………(detik) (16)
dimana : C = 0.373 + 0.023 – 0.043 dimana :
Tf = Periode oleng (detik)
B = Lebar kapal (m)
d = draft kapal (m)
GM = Tinggi metacenter
LWL = Panjang kapal pada garis air
Nilai periode oleng kemudian diplotkan terhadap nilai KG yang diperoleh pada perhitungan perkiraan nilai KG pada tiga kondisi distribusi muatan. Kemudian komputasi dilakukan dengan melihat kondisi distribusi muatan pada berbagai sarat air yang berbeda dan pada tinggi gelombang yang berbeda pula.
3.4.3 Data gelombang laut
Data yang diambil dari tim Survei Perairan Dalam diplotkan berdasarkan rata-rata gelombang perhari. Data tersebut diambil pada bulan Desember 2003. Untuk komputasi kurva stabilitas operasional GZ maka diambil 3 tinggi gelombang, yaitu : tinggi gelombang 1 meter, 1.5 dan 2 meter .
3.4.4 Perhitungan statistik
Sehubungan dengan data kurva stabilitas operasional GZ yang didapatkan tidak menyebar mengikuti kurva normalmaka data – data kurva stabilitas terebut
2CB
GM
B d
( )
LWL100
diuji dengan menggunakan analisis statistik uji Chi Square. Pengujian yang dilakukan berdasarkan statistik non paramertrik karena data yang diuji dari segi kualitatif bukan kuantitatif (Supangat,. 2007).
Maksud dan tujuan dengan menggunakan model ini adalah membandingkan dua data yang berpasangan dari hasil observasi.
Sedangkan rumusnya diambil dari Sugiono (2007) :
A) Ho : Tidak ada pengaruh Pertambahan Draft Kapal terhadap Stabilitas
Kapal
H1 : Ada pengaruh Pertambahan Draft Kapal terhadap Stabilitas Kapal
B) Tingkat Kepercayaan 90% maka α = 10% = 0.1
C) Derajat Kebebasan (dk) = Banyak Kelas - 1 = 10 - 1 = 9
D) X2 Tabel ( dk = 9 ; α = 0.1 )
E) Uji Statistik
(Oi - ei)2
X2 Hitung =
ei
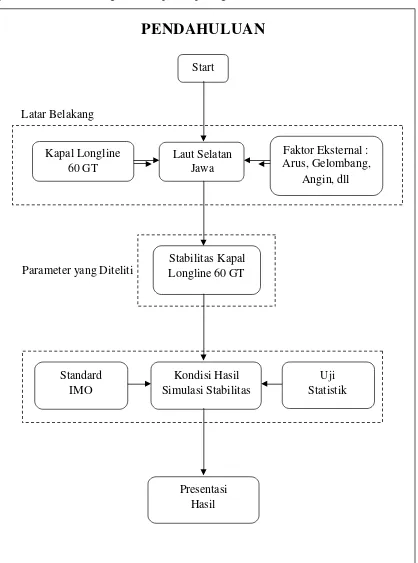
Adapun latar belakang dan metode penelitian yang digunakan dalam penelitian ini secara ringkas ditampilkan pada gambar 5.
Gambar 5 Flow chart rancangan penelitian
PENDAHULUAN
Latar Belakang
Start
Presentasi Hasil Standard
IMO
Kondisi Hasil Simulasi Stabilitas
Uji Statistik Kapal Longline
60 GT
Laut Selatan Jawa
Faktor Eksternal : Arus, Gelombang,
Angin, dll
Parameter yang Diteliti
4 HASIL DAN PEMBAHASAN
4.1 Dimensi Utama Kapal Longline
Dimensi utama kapal longline 60 GT yang diteliti seperti pada tabel 2, dimana Loa = 22.23m, lebar B = 5.5m, draft = 1.54m dan Cb = 0.885
Dari hasil perhitungan rasio dimensi utama kapal longline 60 GT yang diteliti yang terdiri dari L/B, L/D dan D/B diperoleh nilai r a sio seperti yang disajikan pada Tabel 3
Tabel 2 Dimensi utama kapal longline yang diteliti
No Uraian Keterangan
1 Panjang ;
a. Loa a. 23.22 m
b. Lpp b. 17.11 m
2 Lebar (B) 5.50 m
3 Dalam (D) 2.15 m
4 Draft (d) 1.54 m
5 Koefisien Block (Cb) 0.8538
Tabel 3. Rasio dimensi utama kapal longline yang diteliti
Dimensi Utama Longline ( m )
L/B 4.22
L/D 10.8
B/D 2.55
Rasio dimensi utama kapal perlu diketahui dengan jelas karena besaran rasio ini berpengaruh terhadap stabilitas maupun ketahanan kapal. Menurut Iskandar dan Pujiati (1995) besaran rasio L/B dan L/D untuk kapal sejenis longline yang
dikategorikan static gear lebih besar dibandingkan dengan kapal-kapal yang lain
sehingga membutuhkan stabilitas yang cukup tinggi karena kondisi ini dibutuhkan
pada saat melakukan operasi penangkapan terutama pada saat setting maupun
hauling karena kapal beroperasi dengan kecepatan v = 0.
Berikut ini beberapa nilai kisaran rasio dimensi kapal kelompok static gear
2.83 – 11.12, L/D : 4.58 – 17.28 dan B/D : 0.96 – 4.68. Nilai rasio pada kapal yang diteliti L/B (4.22), L/D (10.8) dan B/D (2.55) berada dalam nilai rasio yang di keluarkan oleh Iskandar dan Pujiati (1995). Nilai ini lebih mendekati batas bawah dari selang nilai tersebut dibandingkan batas atasnya, yang berarti bahwa nilai L/B kapal longline yang diteliti tergolong kecil.. Kondisi ini memberikan pengaruh yang baik terhadap stabilitas kapal.
Nilai L/D tergolong kecil, nilai ini berpengaruh terhadap kekuatan
memanjang (longitudinal strength), sehingga kapal lebih tahan terhadap gerakan
lengkung (bending) yang mengarak ke tas maupun ke bawah. Nilai B/D juga
tregolong kecil, nilai yang kecil ini menunjukkan pengaruh yang baik terhadap kemampuan daya dorong kapal.
4.1.1 Parameter hidrostatik
Parameter hidostatik merupakan parameter awal yang menjadi ukuran untuk
melihat sifat-sifat hidrostatik kapal. Parameter tersebut diperoleh berdasarkan
tabel off set dan gambar lines planes kapal longline yang dijadikan sebagai obyek
penelitian. Selanjutnya hasil perhitungan parameter hirostatik t e r s e b u t
ditabulasikan dan dibuat kurva hidrostatik. Hasil perhitungan dapat dilihat pada
Tabel 4, sedangkan bodyplane dan rancangan kapal longline disajikan pada
Gambar 7. Kurva hidrostatis kapal longline yang diteliti seperti pada gambar 6.
Volume displacement menyatakan volume air yang dipindahkan bila kapal
terendam hingga water line tertentu sedangkan ton displacement merupakan berat
dari air yang dipindahkan tersebut. Area water plane merupakan luas bidang datar
pada irisan water line tertentu. Coefficien of fineness dari Cw, Cvp, Cp, CÄ dan Cb
disebut koefisien kegemukan kapal.
Nilai yang dipakai dalam menentukan tingkat kegemukan kapal adalah nilai Cb, nilai ini berkisar antara 0 – 1 . Jika nilai semakin mendekati nilai 1,maka kapal dapat dikatakan semakin gemuk. Apabila mencapai angka 1 maka bagian kapal yang terendam air memiliki bentuk yang mendekati empat persegi panjang.
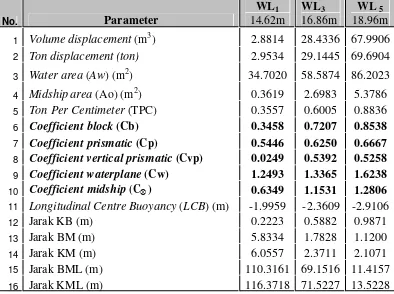
Tabel 4 Besaran parameter hidrostatik kapal longline pada tiap-tiap water line
No. Parameter
WL1
14.62m
WL3
16.86m
WL 5
18.96m 1 Volume displacement (m3) 2.8814 28.4336 67.9906 2 Ton displacement (ton) 2.9534 29.1445 69.6904 3 Water area (Aw) (m2) 34.7020 58.5874 86.2023 4 Midship area (Ao) (m2) 0.3619 2.6983 5.3786 5 Ton Per Centimeter (TPC) 0.3557 0.6005 0.8836
6 Coefficient block (Cb) 0.3458 0.7207 0.8538
7 Coefficient prismatic (Cp) 0.5446 0.6250 0.6667
8 Coefficient vertical prismatic (Cvp) 0.0249 0.5392 0.5258
9 Coefficient waterplane (Cw) 1.2493 1.3365 1.6238
10 Coefficient midship (CÄ) 0.6349 1.1531 1.2806
11 Longitudinal Centre Buoyancy (LCB) (m) -1.9959 -2.3609 -2.9106
12 Jarak KB (m) 0.2223 0.5882 0.9871
13 Jarak BM (m) 5.8334 1.7828 1.1200
14 Jarak KM (m) 6.0557 2.3711 2.1071
15 Jarak BML (m) 110.3161 69.1516 11.4157
16 Jarak KML (m) 116.3718 71.5227 13.5228
Nilai TPC menyatakan berat yang dibutuhkan untuk merubah draft sebesar 1
cm. Nilai TPC kapal longline yang diteliti pada wl5 adalah 0.8538, ini berarti
bahwa untuk menaikkan draft kapal sebesar 1 cm, dibutuhkan berat 0.8538.
Momen inersia merupakan momen puntir dari suatu benda. Besarnya nilai
momen inersia pada kapal tidak hanya tergantung pada bobot kapal itu sendiri
tetapi juga pada distribusi massa pada kapal. Nilai Momen inersia pada kapal
longline yang diteliti untuk wl1 adalah 16.808, untuk wl3 adalah 50.6922, dan wl5
adalah 76.1523. Jarak LCB merupakan jarak maya dimana titik pusat daya apung longitudinal berada, nilainya semakin membesar dengan bertambahnya tinggi
draft atau garis air. Hal ini menunjukan bahwa letak titik apung (buoyancy) secara longitudinal bergerak kearah haluan kapal dengan semakin bertambahnya tinggi
draft kapal..
BM merupakan jari-jari metacenter vertikal dan BML merupakan jari-jari
kurang baik. KM merupakan jarak maya titik metacenter (M) vertikal dari base
line kapal. KML merupakan jarak maya titik metacenter longitudinal. Nilai BML
dan KML juga mengalami kenaikan pada tiaptiap garis air (wl).
Nilai coefficient of fineness dipakai sebagai salah satu cara untuk menilai
kelayakan sebuah disain kapal . Dari hasil penelitian diketahui pada wl5 =18.96m
(Cb: Cp: Cw: Cvp: CÄ: 0.8538 : 0.6667 : 1.6238 : 0.5258 : 1.2806 ) nilai Cb,
cenderung berada di atas nilai acuan (0.61 – 0.72), ini menunjukkan bahwa kapal
longline yang diteliti tingkat kegemukannya tinggi. Nilai CÄ di atas nilai acuan
(0.88 – 0.98), ini menunjukkan bahwa ada ruang di atas kapal yang belum dimanfaatkan dengan baik. Sedangkan nilai Cvp berada di bawah nilai acuan (0.84 – 0.96). Hal ini dapat menyebabkan tahanan gerak kapal membesar sehingga akan mengurangi kecepatan kapal longline tersebut. Nilai Cw yang berada di atas nilai acuan (0.83 – 0.90) karena luas area pada dek sudah terlalu besar.
Pada wl3 = 16.86m (Cb: Cp: Cw: Cvp: CÄ: 0.7207 : 0.6250 : 1.3365 : 0.5392
: 1.531 ) nilai Cb, sesuai dengan nilai acuan (0.61 – 0.72), ini menunjukkan bahwa
kapal longline yang diteliti pada wl3 tingkat kegemukannya baik. Nilai CÄ di atas
nilai acuan (0.88 – 0.98), ini menunjukkan bahwa ada ruang di tengah kapal yang belum dimanfaatkan dengan baik. Sedangkan nilai Cvp berada di bawah nilai acuan (0.84 – 0.96). Hal ini dapat menyebabkan tahanan gerak kapal membesar sehingga akan mengurangi kecepatan kapal longline tersebut. Nilai Cw yang berada di atas nilai acuan (0.83 – 0.90) karena luas area pada dek sudah terlalu besar.
Pada wl1 = 14.62m (Cb: Cp: Cw: Cvp: CÄ: 0.3458 : 0.5446 : 1.2493 : 0.0249
: 0.6349 ) nilai Cb berada dibawah nilai acuan (0.61 – 0.72), ini menunjukkan
bahwa kapal tersebut pada wl1 agak ramping. Nilai CÄ di bawah nilai acuan (0.88
Nilai LCB yang bertanda negatif menunjukkan letak titik apung (B) kapal
berada di belakang midship ke arah buritan,bila keadaan demikian sebaiknya
beban diletakkan pada midship ke arah buritan kapal.
Bentuk kasko kapal ini yang diperoleh berdasarkan data body plan dibagian
haluan memiliki bentuk yang relatif sama yaitu U – bottom. Bentuk ini memiliki
kestabilan yang tinggi dan volume ruang atau kapasitas penyimpanan di bawah dek yang besar, sehingga sangat cocok bagi kapal yang mengoperasikan alat tangkap secara statis. Akan tetapi bentuk ini memiliki tahanan kasko yang besar
sehingga olah gerak (manouvering) dan kecepatan (speed) yang dimiliki terbatas,
namun bukanlah kecepatan yang diutamakan bagi kapal yang mengoperasikan alat tangkap ini melainkan stabilitas yang tinggi.
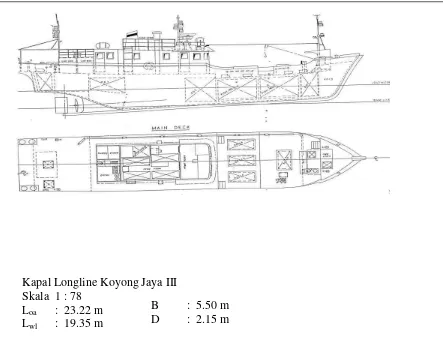
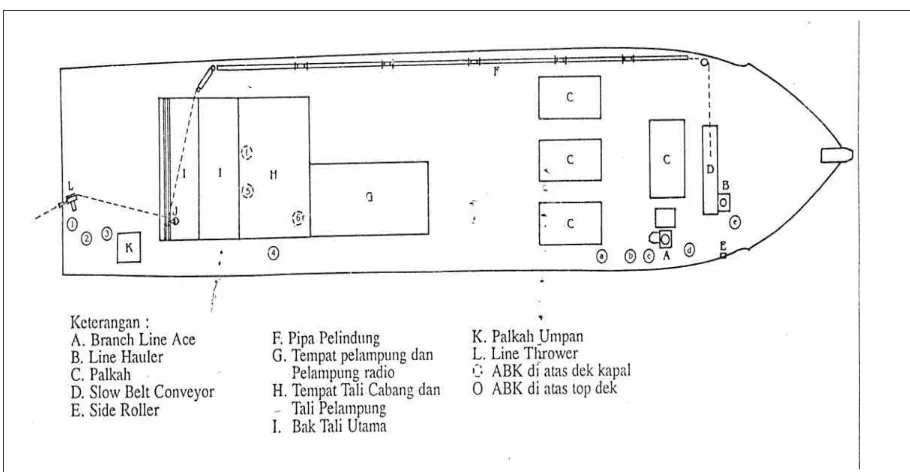
Rencana garis kapal longline yang diteliti ditampilkanpada gambar 7. Gambar 8 adalah rancangan umum kapal. Kita bisa melihat letak palka, ruang mesin, kamar ABK dan geladak. Gambar 9 memperlihatkan Posisi ABK pada saat
TPC 1.3
LCB (m) 0.5
KB (m) 1
BM; KM (m) 8
BML; KML (m) 159
Ñ(m3) (ton) 147
Aw (m2) 119
AÄ (m2) 10
Cb, Cp, Cvp, CÄ, Cw 1
[image:54.595.118.567.86.402.2]WL 1 WL 3 WL 5
Kapal Longline Koyong Jaya III Skala 1 : 78
Loa : 23.22 m
Lwl : 19.35 m
B : 5.50 m
[image:55.595.113.575.90.472.2]D : 2.15 m
Gambar 7 Body plan dan rencana garis kapal longline 60 GT
1 2 3 4 5 6 7 8 9 10
0
1 2 3 4 5 6 7 8 9 10
Gambar 8 Rancangan umum kapal longline 60 GT Kapal Longline Koyong Jaya III
Skala 1 : 78
Loa : 23.22 m
Lwl : 19.35 m
B : 5.50 m
4.3 Posisi Titik G Kapal Longline 60 GT
Kodisi kapal longline 60 GT pada muatan kosong ditunjukkan pada tabel 5 sedangkan kondisi kapal pada muatan setengah penuh dan muatan penuh dapat dilihat pada tabel 6 dan tabel 7.
Tabel 5 Kondisi kapal longline 60 GT pada saat kosong
Berat Posisi x Posisi z
No Item
(ton) (cm)
Moment
(cm)
Moment
1 Kapal kosong
60.0000 -
- 172.0000 10,320.0000
2 Mesin
0.1750 -485.9000 -85.0325
73.1000 12.7925 Total 60.1750 10,332.7925 Selanjutnya diperolah posisi titik berat kapal G seperti
KG = moment of z
KG = 10332.7952 60.175 KG = 1.7 meter
Pada muatan kosong kapal longline ini diketahui posisi titik berat G diatas lunas K adalah 1.7 meter
Tabel 6 Kondisi kapal longline 60 GT pada saat setengah penuh
Berat Posisi x Posisi z
No Item
(ton) (cm)
Moment
(cm)
Moment
1 Kapal kosong 60.0000 0 - 172.0000 10,320.0000
2 Mesin 0.1750 -485.9000 -85.0325 73.1000 12.7925
3 BBM 14.7790 -528.9000 -7,816.6131 120.4000 1,779.3916
4 Air Tawar 3.0800 -528.9000 -1,629.0120 395.6900 1,218.4480
5 ABK 5.6000 -189.2000 -1,059.5200 442.9000 2,480.2400
6 Bahan
makanan
0.0200 -430.0000 -8.6000 387.0000 7.7400
7 Palka Umpan 1.9200 636.4000 1,221.8880 141.9000 -
8 Palka Ikan A - 438.6000 - 227.9000 -
9 Palka Ikan B - 438.6000 - 227.9000 -
10 Palka Ikan C - 438.6000 - 227.9000 17.4150
11 Peralatan 0.0500 872.9000 43.6450 384.3000 272.4480
Total 85.6240 16,108.4751
Posisi titik berat G kapal pada kondisi setengah penuh adalah 1.88 meter sebagaimana seperti perhitungan dibawah ini.
KG = moment of z
[image:59.595.112.537.177.453.2]KG = 16108.4751 85.624 KG = 1.88 meter
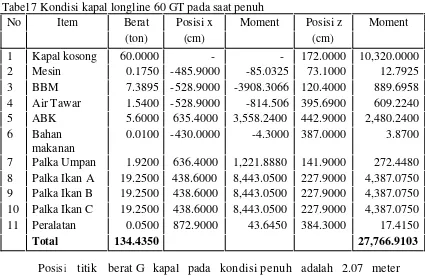
Tabel 7 Kondisi kapal longline 60 GT pada saat penuh
Berat Posisi x Posisi z
No Item
(ton) (cm)
Moment
(cm)
Moment
1 Kapal kosong 60.0000 - - 172.0000 10,320.0000
2 Mesin 0.1750 -485.9000 -85.0325 73.1000 12.7925
3 BBM 7.3895 -528.9000 -3908.3066 120.4000 889.6958
4 Air Tawar 1.5400 -528.9000 -814.506 395.6900 609.2240
5 ABK 5.6000 635.4000 3,558.2400 442.9000 2,480.2400
6 Bahan
makanan
0.0100 -430.0000 -4.3000 387.0000 3.8700
7 Palka Umpan 1.9200 636.4000 1,221.8880 141.9000 272.4480
8 Palka Ikan A 19.2500 438.6000 8,443.0500 227.9000 4,387.0750
9 Palka Ikan B 19.2500 438.6000 8,443.0500 227.9000 4,387.0750
10 Palka Ikan C 19.2500 438.6000 8,443.0500 227.9000 4,387.0750
11 Peralatan 0.0500 872.9000 43.6450 384.3000 17.4150
Total 134.4350 27,766.9103
Posisi titik berat G kapal pada kondisi penuh adalah 2.07 meter
sebagaimana seperti perhitungan dibawah ini.
KG = moment of z
KG = 27766.9103 134.435
KG = 2.07
Dari ketiga kondisi di atas terlihat bahwa pada kondisi muatan penuhlah KG tertinggi dapat dicapai.
Saat kapal berangkat menuju daerah penangkapan, muatan pada kapal Longline terdiri atas perbekalan,bahan bakar dan umpan hidup yang berisi penuh. Pada saat kembali, muatan – muatan tersebut (yang terdapat dibawah dek kapal) akan berkurang tetapi palka akan terisi penuh oleh hasil tangkapan. Hal ini
menyebabakan perubahan titik berat pada kapal, sehingga letak titik G (center of
gravity) kapal akan berubah, titik ini akan bergerak ke atas. KG =
KG =
Titik berat (G) pada sebuah kapal merupakan titik pusat seluruh gaya yang menekan kebawah. Letak titik in