SIMULASI PEMROSESAN SINYAL SUARA UNTUK SISTEM AKTIF KENDALI KEBISINGAN PADA KNALPOT (NOISE SILENCER)
TESIS
OLEH
ALFISYAHRIN 057015006/TM
SEKOLAH PASCASARJANA UNIVERSITAS SUMATERA UTARA
Judul Tesis : SIMULASI PEMROSESAN SINYAL SUARA UNTUK SISTEM AKTIF KENDALI KEBISINGAN
PADA KNALPOT (NOISE SILENCER)
Nama Mahasiswa : Alfisyahrin
Nomor Pokok : 057015006
Program Studi : Teknik Mesin
Menyetujui Komisi Pembimbing
(Dr.-Ing. Ikhwansyah Isranuri) Ketua
(Dr. Ir. M. Dirhamsyah, MT) (Ir. Nasrul Abdi, M.Sc)
Anggota Anggota
Ketua Program Studi, Direktur
(Prof. Dr. Ir. Bustami Syam, MSME) (Prof. Dr. Ir. T. Chairun Nisa B, M.Sc)
Telah diuji pada
Tanggal: 16 Februari 2008
PANITIA PENGUJI TESIS
Ketua : Dr. –Ing. Ikhwansyah Isranuri
Anggota : 1. Dr. Ir. M. Dirhamsyah, MT
2. Ir. Nasrul Abdi, M.Sc
3. Prof. Dr. Ir. Bustami Syam, MSME
ABSTRAK
Aktif Kendali Kebisingan adalah teknik mengatasi bising dengan bising atau suara dilawan dengan suara. Teknik ini ditujukan untuk meredam kebisingan seminimal mungkin atau bahkan dapat menghilangkan kebisingan tersebut jika pelemahan (pereduksian) sinyal bisa dilakukan dengan sempurna. Pemrosesan sinyal tersebut adalah dengan membuat amplitudo sinyal dan frekuensi sinyal lawan (anti signal) berbalik fasa 1800 dari sinyal sumber untuk menghasilkan suatu pelemahan (reduksi) sinyal. Pelemahan kebisingan (noise reduction) ini di proses dengan metoda pemrosesan sinyal. Pada penelitian ini peneliti menggunakan Pembangkit Sinyal Bising dan Penggeser Fasa sebagai Anti Noise atau Sinyal Lawan. Anti Noise inilah yang akan menghasilkan sinyal lawan yaitu dengan membalikkan fasa sinyal 1800 yang fungsinya adalah untuk melawan sinyal sumber (Sound Source) yaitu Knalpot (Silencer). Dalam penelitian ini, dirancang dan dilakukan penganalisaan sebuah pemrosesan sinyal bising sesederhana mungkin dari keacakan sinyal bising yang selama ini diketahui sangat rumit dengan tujuan agar perhitungan pemrosesan sinyal dapat lebih sederhana. Dari hasil riset terlihat bahwa pergeseran fasa yang merupakan frekuensi dan amplitude memiliki selisih pergeseran sebesar 33,3%. Nilai ini diketahui dari hasil perbandingan sinyal sumber dengan sinyal pembangkit. Maka disimpulkanlah bahwa sinyal kebisingan telah dapat direduksi sebesar 33,3%. Penyelesaiannya adalah dengan menggeser fasa sebesar 66,7% untuk mencapai nilai 0%, yang berarti reduksi mencapai nilai sempurna. Namun penghilangan bunyi merupakan suatu kemungkinan yang sulit sekali bahkan tidak mungkin, oleh karenanya penelitian ini salah satu cara dengan pendekatan aktif kendali kebisingan untuk mencapai reduksi bising dengan persentase sebesar mungkin dengan maksud untuk mendapatkan kenyamanan bunyi dari sekian banyak bentuk variasi bunyi.
ABSTRACT
Active Noise Control is a technique to overcome noise through noise versus noise method. This technique is intended to reduce the noise as minimal as possible and, moreover, it can eliminate the noise if signal reduction can be perfectly done. The signal processing is by making signal amplitude and opponent signal frequency (anti signal) turn the phase around 180° of the signal source to produce a signal reduction. This noise reduction is processed by means of signal processing method. In this research, the researcher used a Noise Signal Generator and Phase Shifter as anti noise or anti signal. This anti noise will produce anti signal by reversing the signal phase 180° that functions to counter the sound source that is silencer. In this research, a noise signal processor was designed as simple as possible and it's very complicated noise signal randomness was analyzed that the signal processing calculation can be simpler. The result of the research shows that the displacement of phase in the form of frequency and amplitude has the difference of 33.3%. This value was obtained from the result of the comparison between source signal and generator signal. It can be concluded from the result of the research that noise signal has been reduced for 33.3%. To obtain the value of 0% in order to reach perfect reduction, the phase must be shifted for 66.7%. Yet, the elimination of noise is likely hard or even impossible to do. For that reason, this research is one of the ways to obtain a bigger percentage of noise reduction through active noise control approach to achieve the comfort of sound.
KATA PENGANTAR
Alhamdulillah puji syukur saya panjatkan kepada Allah S.W.T yang telah
melapangkan saya untuk menulis tesis ini. Dimana diketahui bahwa langkah untuk
melanjutkan kepada tesis adalah telah mengajukan proposal dan itu merupakan suatu
persyaratan.
Sebagaimana yang telah saya pelajari tentang Bunyi (Sound) dan Kebisingan
(Noise) juga Getaran (Vibrasi) maka dapatlah saya susun tesis saya ini untuk di
ajukan.
Dan untuk selanjutnya penulis ingin mengucapkan terimakasih kepada
berbagai pihak yang telah banyak membantu penulis baik secara moril maupun
materil, langsung atau pun tidak langsung:
Kepada Dr.-Ing. Ikhwansyah Isranuri, selaku Ketua Komisi Pembimbing dan
Sekretaris Program Studi Teknik Mesin SPs-USU. Dr. Ir. M. Dirhamsyah, MT,
selaku Anggota Komisi Pembimbing. Ir. Nasrul Abdi, M.Sc, selaku Anggota Komisi
Pembimbing. Direktur Program Pascasarjana Prof. Dr. T. Chairun Nisa B, M.Sc.
Prof. Dr. Ir. Bustami Syam, MSME, selaku Ketua Program Studi Teknik Mesin
SPs-USU dan seluruh rekan-rekan mahasiswa yang juga banyak membantu.
Demikianlah kata pengantar dari penulis, kemudian penulis juga memohon
sangat kritik dan saran yang dapat membantu dalam rangka memperbaiki tesis ini
untuk mencapai hasil yang diharapkan. Terimakasih
Medan, Februari 2008
Penulis
Alfisyahrin
RIWAYAT HIDUP
Alfisyahrin
Data Diri Tempat/Tgl. Lahir : Banda Aceh, 30 Juli 1970
Jenis Kelamin : Laki-laki Status : Belum Kawin
Alamat : Jl. Hamzah Fansuri No.7 Darussalam
Banda Aceh
Telepon : +62 - 0651- 7552328
E-mail : alfisyahrin@yahoo.com
Warga Negara : Indonesia
Latar Belakang Pendidikan
1977-1983 : SD Negeri 1, Takengon 1983-1986 : SMP Negeri 1, Banda Aceh 1986-1989 : SMA Negeri 1, Banda Aceh
1989-1990 : Institut Teknologi Indonesia, Jurusan Planologi 1990-1996 : Universitas Muhammadiyah Jakarta,
Fakultas Teknik Elektro
Pengalaman Kerja November 1994
Kerja Praktek di PT. ASTRA MOTOR DAIHATSU STAMPLING PLAN
Industri.
12 Oktober 1998 – 12 Januari 1999
Pengalaman Kerja di PT. AUTOCHEM INDUSTRY posisi
Junior Project Engineer :
Mengatur sistem preventive maintenance dan pengembangan alat atau mesin.
- Menindak lanjuti jadwal tentang trouble shooting pada mesin.
- Membuat sistem kinerja mesin.
May – September 2000, Sebagai Staff Electrical Engineering pada PCI (Pacific Consultan International) di Banda Aceh.
1999 – Saat ini,
Staff pengajar pada Fakultas Teknik Elektro Universitas Syiah Kuala.
2001,
Mahasiswa di Institut Teknologi Bandung Pada Jurusan Electromedik, 1 Semester
2002-2004,
Mahasiswa di Universiti Kebangsaan Malaysia
Pada Jurusan Electronic Design and System, 3 Semester melakukan penelitian
Pengalaman Mengajar (1999/2000) Dasar Elektronik (2000/2001) Rangkaian Listrik
(1999/2000) Elektronika Analog (1999/2000) Statistik
(1999/2001) Stokastik
Pelatihan/Training/Se
minar 1. 1 – 5 Februari 2000, Kerjasama HEDS-JICA-UNSYIAHPelatihan PABX Mikrokomputer, . Sebagai Pemakalah
2. 1 – 7 Februari 2000, Pelatihan Internetworking,
Kerjasama HEDS-JICA-UNSYIAH. Sebagai Peserta 3. 31 Juli – 5 Agustus 2000 Pelatihan PEKERTI (Program
Pengembangan Keterampilan Dasar Teknik Instruksional) pada Pusat Antar Universitas untuk Peningkatan dan Pengembangan Aktivitas Instruksional – Universitas Terbuka untuk Dosen Muda
4. 9 – 11 Agustus 2000, Aplikasi PLC Untuk Penelitian & Industri, Kerjasama HEDS - JICA – UNSYIAH. Sebagai Peserta
5. 9 – 14 Oktober 2000 Lokakarya Manajemen Mutu
Terpadu Dosen Yunior Fakultas Teknik Unsyiah, Kerjasama HEDS – JICA – UNSYIAH. Sebagai Peserta
6. 18 – 23 Nopember 2000, Training Program Acoustic
Sebagai Staff Electrical Engineering.
7. 16 – 18 Nopember 2000, Training Basic Acoustic dan Acoustic Instrumetation Training Program. Sebagai Peserta
8. 20 – 25 Nopember 2000, Lokakarya GIS & Remote
Sensing Dalam Pemetaan, Kerjasama HEDS- JICA – UNSYIAH. Sebagai Peserta
9. 27 - 29 Agustus 2001 Lokakarya Penyusunan Pedoman
Penulisan TGA & Panduan Pemberian Bimbingan.
Kerjasama UNSYIAH – HEDS/JICA Sebagai Peserta
10.19-21 Juni 2001 Lokakarya Perancangan Sistem
Informasi Manajemen Akademik, Kerjasama UNSYIAH – HEDS/JICA. Sebagai Peserta
11.22 – 25 Juni 2001 Lokakarya Pemanfaatan
Intranet/Internet Untuk Sistem Informasi Akademik, Kerjasama UNSIAH – HEDS/JICA. Sebagai Peserta
12.6 – 8 Agustus 2001 Lokakarya Penerapan Teknologi
Pendidikan Dalam Proses Pembelajaran, Kerjasama UNSYIAH – HEDS/JICA. Sebagai Peserta
13.28 – 30 Mei 2001 Lokakarya Penyempurnaan Silabus & Kurikulum, Kerjasama UNSYIAH – HEDS/JICA. Sebagai Peserta
14.27 – 29 Juni 2001 Lokakarya Penyusunan Sistem
Manajemen, Kerjasama UNSYIAH – HEDS/JICA.
Sebagai Peserta.
15.12 Maret 2001 Rapat Kerja Fakultas Teknik Universitas Syiah Kuala Tahun 2001. Sebagai Peserta
16.17 - 20 Juli 2001 Pelatihan Penulisan Artikel Ilmiah. Sebagai Peserta
17. 06 – 07 September 2005, Pre Program of Information Technology, Magister Program of Mechanical Engineering, Graduate School USU. Sebagai Peserta
Hobbi Membaca Travelling
Musik : Guitar
DAFTAR ISI
Halaman
ABSTRAK... i
ABSTRACT... ii
KATA PENGANTAR... iii
RIWAYAT HIDUP... iv
DAFTAR ISI... vii
DAFTAR TABEL... ix
DAFTAR GAMBAR ... x
DAFTAR LAMPIRAN... xix
DAFTAR ISTILAH... xx
1. PENDAHULUAN... 1
1.1. Latar Belakang Masalah... 1
1.2. Perumusan Masalah... 10
1.3. Tujuan Penelitian... 11
1.3.1. Tujuan Umum ... 11
1.3.2. Tujuan Khusus... 11
1.4. Manfaat Penelitian... 12
2. TINJAUAN PUSTAKA... 13
2.1. Asal Perambatan dan Kecepatan Bunyi... 13
2.2. Perambatan Bunyi pada Media... 24
2.2.1. Aktif Kendali Kebisingan... 25
2.3. Fourier Series ... 46
2.4. Uraian Aktif Kendali Kebisingan... 51
2.4.1. Mekanisme kerja dan cara kerja... 51
2.5. Aplikasi Aktif Kendali Kebisingan... 52
2.5.1. Pembangkit Sinyal Bising... 53
2.5.2. Penggeser Fasa... 54
2.5.3. Penggeser Fasa (Phase Shift) pada rangkaian input RC... 57
3.1. Waktu dan Tempat... 64
3.2. Variabel yang diamati... 64
3.3. Teknik Pengukuran, Pengolahan dan Analisa Data... 64
3.4. Bahan dan Alat... 65
3.5. Pelaksanaan Penelitian... 65
4. PEMBAHASAN... 66
4.1. Pengambilan data kebisingan dari Sumber Bising Knalpot (Noise Silencer)... 66 4.1.1. Persiapan dinding kedap suara... 66
4.1.2. Setting dinding kedap suara pada belakang mobil... 68
4.1.3. Persiapan pengukuran Knalpot (Noise Silencer) ... 69
4.1.4. Setting alat pengukuran Knalpot (Noise Silencer) dan Proses Pengukuran... 70 4.2. Pengambilan data Kebisingan dari Pembangkit Sinyal Bising... 79
4.2.1. Hasil dari pengambilan data Pembangkit Sinyal Bising dengan Oscilloscope ... 84 4.3. Pengambilan data Sinyal Penggeser Fasa... 89
4.4. Pada bagian potongan rangkaian tahap pertama output Signal Generator... 96 4.4.1. Titik pada input Transistor 1... 97
4.4.2. Tititk output Kolektor Transistor 1... 99
4.4.3. Titik pada keluaran Emitor ke by pass RC... 101
4.4.4. Titik pada Emitor by pass C... 103
4.4.5. Titik pada input Transistor 2... 105
4.4.6. Titik output Kolektor pada Transistor 2... 107
4.4.7. Titik Emitor pada Transistor 2... 109
4.4.8. Titik Input pada Transistor 3... 111
4.4.9. Titik ouput Kolektor pada Transistor 3... 113
4.4.10. Titik Emitor pada Transistor 3... 115
4.4.11. Titik input pada Transistor 4... 117
4.4.12. Titik output Emitor pada Transistor 4... 119
4.5. Perhitungan Sinyal Knalpot dan Sinyal Pembangkit Sinyal Bising... 121
4.5.1. Sound Power Level... 121
4.5.2. Sound Pressure Level... 123
4.5.3. Frekuensi... 125
5. KESIMPULAN... 134
5.1. Kesimpulan... 134
5.2. Saran... 140
DAFTAR TABEL
Nomor Judul Halaman
2.1 Kelajuan Bunyi pada Material... 24
2.2 Kuat Bunyi pada bermacam suara... 25
2.3 Transformasi Fourier... 50
3.1 Bahan dan Peralatan... 65
4.1 Pengukuran kebisingan pada Knalpot (Noise Silencer) ... 75
4.2 Hasil Pengambilan data Sinyal dari Rangkaian Pembangkit Sinyal Bising... 88 4.3 Sumber Sound Power Level dan SoundPower... 123
4.4 Bagian dari Transformasi Fourier... 127
4.5 Pengukuran Kanlpot pada Tiga titik X-, Z+, Z-... 132
5.1 Perbandingan Amplitudo dan SPL pada variasi 1... 138
DAFTAR GAMBAR
Nomor Judul Halaman
2.1 Garpu tala yang dipukul menghasilkan perubahan tekanan udara
karena getarannya dan menghasilkan bunyi... 13
2.2 Konstruksi Telinga manusia dalam menangkap bunyi... 14
2.3 Sinyal suara dan sinyal diskret atau dalam istilah pemrosesan sinyal di samplingkan... 17 2.4 Sinyal tegak... 18
2.5 Sinyal tegak dengan panjang gelombangnya pada perbedaan frekuensi... 19 2.6 Sinyal tegak dengan panjang gelombang pada perbedaan kecepatannya... 20 2.7 Gelombang Tegak Low Amplitudo Diam... 25
2.8 Gelombang Tegak HighAmplitudo... 26
2.9 Gelombang Tegak pada pergeseran Fasa... 26
2.10 Dua buah gelombang tegak dengan perbedaan fasa1800 saling meniadakan. ... 27 2.11 Sinyal Sumber atau Sinyal 1... 27
2.12 Sinyal Lawan atau Sinyal 2... 28
2.13 Aktif sinyal... 28
2.14 Pergeseran fasa pada sinyal suara... 30
2.15 Sinyal Aktif Kebisingan... 31
2.16 Sinyal Aktif Kebisingan dengan gradasi warna... 32
2.18 Konfigurasi Hardware pada Aktif Kendali Kebisingan... 34
2.19 Propagasi pada dua sinyal... 34
2.20 Blok Diagram Single Chanel Sistem Aktif Kendali Kebisingan... 35
2.21 Aktif pelindung telinga dari sumber kedua... 36
2.22 Blok Diagram Sistem satu Chanel Aktif Kendali Kebisingan... 36
2.23 Setting Sistem Aktif Kendali Kebisingan... 37
2.24 Sistem Kerja Aktif Kendali Kebisingan... 38
2.25 Konfigurasi SISOSE FF- Sistem Aktif Kendali Kebisingan... 39
2.26 Konfigurasi Percobaan Aparatus... 39
2.27 Aktif Kendali Kebisingan... 40
2.28 Aktif Kendali Kebisingan pada telinga ditempatkan pada primari path and forward path... 41 2.29 Single Channel Adaptive Control... 42
2.30. F-X AP Adaptive Nonlinear Control... 43
2.31 Blok Diagram Sistem Wire Less Aktif Kendali Kebisingan... 44
2.32 Aktif Kendali Kebisingan Control Problem... 44
2.33 Periodik perencanaan Aktif Kendali Kebisingan... 45
2.34 Periodik Aktif Kendali Kebisingan diagram... 45
2.35 Sinkronisasi blok diagram pemrosesan Sinyal Aktif Kendali Kebisingan... 46 2.36 Fungsi dari suatu sinyal dengan perioda... 47
2.38 Knalpot (noise silencer) Mobil... 52
2.39 Rangkaian Pembagi Tegangan... 53
2.40 Proses input dan output dari pergeseran fasa... 55
2.41 Input pada Basis Transistor... 55
2.42 Sudut fasa versus frekuensi pada input rangkaian RC... 58
2.43 Input pada rangkaian RC disebabkan tegangan basis mendahului tegangan input dibawah frekuensi menengah pada sudut fasa... 58 3.1 Prinsip Aktif Kendali Kebisingan... 61
3.2 Kerangka Konsep... 62
3.3 Blok Diagram... 63
4.1 Pengukuran Dan Pemotongan ... 67
4.2 Mengatur Dinding... 67
4.3 Menyekat Belakang Mobil dengan dinding kedap suara... 68
4.4 Tampak sisi lain dari penyekatan belakang mobil dengan dinding kedap suara... 68 4.5 Skala Alat Ukur Sound Analyzer... 69
4.6 Bentuk fisik Alat Ukur Sound Analyzer... 69
4.7 Mikropon Merk Norsonic yang akan digunakan untuk pengukuran Knalpot... 70 4.8 Teknisi sedang memasang Mikropon... 70
4.9 Setting Selesai... 71
4.11 Proses pengukuran dan pengambilan data... 71
4.12 Posisi pengukuran Knalpot (Noise Silencer) ... 72
4.13 Kondisi pengukuran Bola... 73
4.14 Kondisi pengukuran Setengah Bola... 74
4.15 Sinyal Titik 1 Aksis X-... 76
4.16 Sinyal Titik 2 Aksis Z+... 77
4.17 Sinyal Titik 3 Aksis Z-... 77
4.18 Sinyal 3 Titik Aksis X-, Z+, Z-... 78
4.19 Blok Diagram dan Pembangkit Sinyal Bising yang telah dirancang... 79
4.20 Prototipe Pembangkit Sinyal Bising yang telah dirancang... 79
4.21 Rangkaian Pembagi Tegangan... 80
4.22 Bagian 1 Rangkaian Pembangkit Sinyal Bising... 81
4.23 Bagian 2 Rangkaian Pembangkit Sinyal Bising... 82
4.24 Bagian 3 Rangkaian Pembangkit Sinyal Bising... 83
4.25 Sinyal dari Pembangkit Sinyal Bising pada frekuesni input 315 Hz...
84
4.26 Sinyal dari Pembangkit Sinyal Bising pada frekuensi input 400 Hz...
85
4.27 Sinyal dari Pembangkit Sinyal Bising pada frekuesni input 500...
85
4.28 Sinyal dari Pembangkit Sinyal Bising pada frekuesni input 630 Hz...
86
4.29 Sinyal dari Pembangkit Sinyal Bising pada frekuesni input 800 Hz...
4.30 Sinyal dari Pembangkit Sinyal Bising pada frekuesni input 1000 Hz...
87
4.31 Grafik Pembangkit Sinyal Bising... 89
4.32 Rangkaian Pembangkit Sinyal Bising dan Penggeser Fasa... 89
4.33 Blok Diagram Penggeser Fasa... 90
4.34 Pengoperasian dan pengambilan data Rangkaian Penggeser Fasa... 90 4.35 Hasil dari pengambilan data Rangkaian Penggese Fasa dimana sinyal dari kiri bergerak... 91 4.36 Hasil dari pengambilan data Rangkaian Penggese Fasa dimana sinyal sudah bergerak ke kanan... 91 4.37 Rangkaian Voltage Devider... 92
4.38 Rangkaian Voltage Devider Bias Circuit... 93
4.39 Rangkaian Voltage Devider Bias Circuit dengan Rangkaian RC... 95
4.40 Rangkaian RC pasif filter... 95
4.41 Rangkaian tahap 1 Penggeser Fasa... 96
4.42 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 96
4.43 Dari output Signal/Function Generator dapat dilihat sinyal sinusoidal untuk input pada Rangkaian Penggeser Fasa... 97 4.44 Rangkaian tahap 2 Penggeser Fasa, input pada Transistor 1... 97
4.45 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 97
4.46 Merupakan grafik Tegangan pada input Transistor 1... 98
4.47 Merupakan grafik Arus pada input Transistor 1... 98
4.49 Rangkaian tahap 2 Penggeser Fasa, output Kolektor pada Transistor 1.. 99
4.50 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 100
4.51 Merupakan grafik Tegangan pada output Kolektor Transistor... 100
4.52 Merupakan grafik Arus pada output Kolektor Transistor... 100
4.53 Merupakan grafik Daya pada output Kolektor Transistor... 101
4.54 Rangkaian tahap 2 Penggeser Fasa, output Emitor pada Transistor 1... 101
4.55 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 102
4.56 Merupakan grafik Tegangan pada keluaran emitor ke by pass RC... 102
4.57 Merupakan grafik Arus pada keluaran emitor ke by pass RC... 102
4.58 Merupakan grafik Daya pada keluaran emitor ke by pass RC... 103
4.59 Rangkaian tahap 2 Penggeser Fasa, output Emitor by pass Kapasitor pada Transistor 1... 103 4.60 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 104
4.61 Merupakan grafik Tegangan pada keluaran pada Emitor by pass C pada Transistor 1... 104 4.62 Merupakan grafik Arus pada keluaran pada Emitor by pass C pada Transistor 1... 104 4.63 Merupakan grafik Daya pada keluaran pada Emitor by pass C pada Transistor 1... 105 4.64 Rangkaian tahap 3 Penggeser Fasa, iput pada Transistor 2... 105
4.65 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 106
4.66 Merupakan grafik Tegangan pada input Transistor 2... 106
4.68 Merupakan grafik Daya pada input Transistor 2... 107
4.69 Rangkaian tahap 3 Penggeser Fasa, output Kolektor pada Transistor 2.. 107
4.70 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 108
4.71 Merupakan grafik Tegangan pada out put Kolektor pada Transistor 2.. 108
4.72 Merupakan grafik Arus pada out put Kolektor pada Transistor 2... 108
4.73 Merupakan grafik Daya pada out put Kolektor pada Transistor 2... 109
4.74 Rangkaian tahap 3 Penggeser Fasa, output Emitor pada Transistor 2... 109
4.75 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 110
4.76 Merupakan grafik Tegangan pada out put Emitor pada Transistor 2... 110
4.77 Merupakan grafik Arus pada out put Emitor pada Transistor 2... 110
4.78 Merupakan grafik Daya pada out put Emitor pada Transistor 2... 111
4.79 Rangkaian tahap 4 Penggeser Fasa, input pada Transistor 3... 111
4.80 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 112
4.81 Merupakan grafik Tegangan pada input pada Transistor 3... 112
4.82 Merupakan grafik Arus pada input pada Transistor 3... 112
4.83 Merupakan grafik Daya pada input pada Transistor 3... 113
4.84 Rangkaian tahap 4 Penggeser Fasa, output Kolektor pada Transistor 3.. 113
4.85 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 114
4.86 Merupakan grafik Tegangan pada ouput Kolektor pada Transistor 3.... 114
4.87 Merupakan grafik Arus pada ouput Kolektor pada Transistor 3... 114
4.89 Rangkaian tahap 4 Penggeser Fasa, output Kolektor pada Transistor 3.. 115
4.90 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 115
4.91 Merupakan grafik Tegangan pada ouput Emitor pada Transistor 3... 116
4.92 Merupakan grafik Arus pada ouput Emitor pada Transistor 3... 116
4.93 Merupakan grafik Daya pada ouput Emitor pada Transistor 3... 116
4.94 Rangkaian tahap 5 Penggeser Fasa, input pada Transistor 4... 117
4.95 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 117
4.96 Merupakan grafik Tegangan pada input pada Transistor 4... 118
4.97 Merupakan grafik Arus pada input pada Transistor 4... 118
4.98 Merupakan grafik Daya pada input pada Transistor 4... 118
4.99 Rangkaian tahap 5 Penggeser Fasa, output Emitor pada Transistor 4... 119
4.100 Nilai perhitungan Tegangan, Arus dan Daya dari rangkaian... 119
4.101 Merupakan grafik Tegangan pada output Emitor pada Transistor 4... 120
4.102 Merupakan grafik Arus pada output Emitor pada Transistor 4... 120
4.103 Merupakan grafik Tegangan pada output Emitor pada Transistor 4... 121
4.104 Mesin atau sumber suara... 122
4.105 Sound Pressure pada tekanan 1 ATM... 124
4.106 Gelombang Sinusoidal dari berbagai variasi frekuensi... 125
4.107 Potongan dari grafik X- Aksis yang akan di hitung... 128
4.108 Potongan dari grafik Z+ Aksis yang akan di hitung... 129
4.110 Grafik Pembangkit Sinyal Bising yang akan di hitung... 132
5.1 Proses Pelemahan Sinyal... 135
5.2 Proses Pelemahan Sinyal dan Pergeseran Fasa juga perubahan
Aplitudo... 136
5.3 Proses Pelemahan Sinyal dan Pergeseran Fasa pada variasi 1... 137
DAFTAR LAMPIRAN
Nomor Judul Halaman
1. Skematik Pembangkit Sinyal Bising... 146
2. Skematik Penggeser Fasa... 147
3. Tabel Transformasi Fourier... 148
DAFTAR ISTILAH
Satuan
a Amplitude (m)
c Speed of sound (m/s)
d Depth (m)
f Frequency (Hz)
g Gravity acceleration (m/s2)
l Length (m)
m Surface weight (kg/m2)
n Attenuation coefficient
p Sound pressure (dB)
s Stiffness (N/m)
t Time (s)
x Static deflection (m)
A Total absorption (m2
-Sabin)
B Bending stiffness (Nm)
C Correction factor (dB)
D Sound energy density
(W-/m3)
E Young’s modulus (Pa)
Lp Sound pressure level (dB)
M Total weight (kg)
NR Noise reduction (dB)
PWL Sound power level (dB)
S Area (m2)
Tc Celsius temperature (0C)
TK Kelvin temperature (0K)
TR Rankine temperature (0R)
TL transmission loss (dB)
V Volume (m3)
W Sound power (W)
Absorption coefficient
Path length difference (m)
Transmissibility
Loss factor
Geometric angle
Wavelength (m)
Damping coefficient (kg
rad/s)
Density (kg/m3)
Poisson’s ratio
Angular frequency (rad/s)
Noise reduction (dB)
4m Air absorption (1/m or
BAB 1 PENDAHULUAN
1.1 Latar Belakang
Kebisingan dalam abad ini sudah merupakan problem cukup besar pada
keseluruhan masyarakat maju. Dimana faktor kebisingan ini semakin meningkat
hampir menyeluruh di berbagai sektor, diantaranya lingkungan dan tempat-tempat
industri. Penyebab semua ini adalah kemajuan teknologi yang semakin meningkat
sejak dimulainya Revolusi Industri pada abad 17 terciptanya mesin-mesin industri
yang hampir rata-rata menimbulkan kebisingan.
Oleh karena itu untuk mengatasi kebisingan tersebut maka perlu dikaji dan di
teliti lebih lanjut tentang faktor kebisingan melalui ilmu suara atau akustik yang lebih
dikembangkan kepada ilmu Kendali Kebisingan (Noise Control). Ilmu ini berawal
dari ilmu Fisika Akustik dimana kemudian berkembang kepada berbagai disiplin ilmu
seperti pada Teknik Mesin, Arsitektur, Elektro, bahkan Kimia. Namun pembahasan
pada tulisan ini meliputi ruang lingkup Teknik Mesin dan Elektro yaitu ilmu Aktif
Kendali Kebisingan (Active Noise Control).
Dengan semakin berkembangnya ilmu pengetahuan serta didukung dengan
fasilitas dalam melaksanakan penelitian, maka para pakar ilmu terus mencoba
mengembangkan berbagai metode untuk mendapatkan hasil yang akurat guna
Dalam teorinya suatu bunyi dengan melakukan perlawanan terhadap bunyi
sumber maka bunyi tersebut dapat dihilangkan. Namun semua pakar maklum dalam
praktisinya tidak ada kondisi ideal, artinya tidak mungkin kondisi nol dapat dicapai.
Oleh karena itu para peneliti menetapkan melakukan pendekatan dengan cara
mengambil nilai minimal dalam mengambil kesimpulan pada penelitian. Pendekatan
solusi ini tentu dengan teknik untuk mendapatkan nilai sekecil mungkin yaitu
bertujuan untuk mereduksi bunyi atau kebisingan tersebut.
Pada penelitian yang dilakukan dalam tesis ini, peneliti mencoba melakukan
pendekatan minimal tersebut dan juga bertujuan untuk mendapatkan hasil suatu
kenyamanan bunyi. Sebab pada saat peneliti mendefinisikan bunyi muncul
asumsi-asumsi lain mengenai pemahaman tentang bunyi, yaitu telah dapat diasumsi-asumsikan
bahwa suatu bunyi tergantung menurut selera pendengar bunyi tersebut. Dalam hal
ini lebih difokuskan kepada tingkat kebisingan bunyi tersebut.
Asumsi ini telah dianalisa dikarenakan standar manusia pada saat
mendengarkan bunyi atau bising itu berbeda-beda, contohnya ada yang manusia telah
mencapai tingkat merasa bising pada suatu bunyi sementara manusia lain belum
merasakan bunyi tersebut sebagai suatu kebisingan. Oleh karena itu peneliti mencoba
menggunakan pendekatan normal atau standar kebisingan yang dirasakan oleh setiap
manusia pada saat mendengarkan bunyi. Standar ini lebih mengacu kepada
kenyamanan dalam mendengarkan bunyi tersebut.
Dalam mengklasifikasikan bunyi atau bising kita dapat mengambil sampel
setiap manusia berbeda, apalagi jika selera musik mengarah kepada musik Rock yang
memiliki kecenderungan kepada hingar bingar. Maka untuk manusia seperti ini
standar kebisingan boleh jadi tidak begitu bermasalah bagi manusia tersebut. Namun
bagi manusia yang mempunyai selera musik Melankolis atau Slow, Sweet, Classic
bahkan Romantis tentu musik beraliran Rock merupakan musik yang hingar bingar.
Pada musik Rock ini juga dapat dispesifikasi lagi tentang kuat bunyinya, ini diketahui
dari berbagai aliran musik Rock yang juga tingkat kebisingannya berbeda-beda misal
Sweet Rock, Slow Rock, Hard Rock, Heavy Metal, Speed Metal, Trash Metal sampai dengan Hard Core. Tingkatan kebisingan spesifikasi musik tersebut begitu bervariasi sehingga manusia yang mendengarkannya pun bervariasi. Contoh kasus lain yang
bisa diidentikan dengan musik rock adalah manusia yang biasa bekerja di pabrik yang
mayoritas berada dalam lingkungan bising, jika dibandingkan dengan manusia yang
bekerja di ladang pegunungan tentu mereka memiliki persepsi masing-msing
mengenai kebisingan tersebut. Atau dengan kata lain standar kebisingan mereka
berbeda.
Dari pengamatan global ini peneliti mencoba mengambil standar atau jalan
tengah bahwa untuk mengatasi kebisingan adalah dengan cara mencari hasil bunyi
yang membuat para pendengar bunyi bukan tidak merasa bising melainkan para
pendengar bunyi merasakan suatu kenyamanan ketika mendengar bunyi tersebut.
Tentu jika dikembangkan dan diuraikan penelitian ini akan menjadi sangat luas dan
permasalahan akan melebar dikarenakan faktor kejiwaan dalam hal kenyamanan
itu peneliti hanya membatasi penelitian ini untuk mengatasi kebisingan pada tahapan
awal dahulu yaitu mencari hasil kenyamanan bunyi dalam menganalisa bunyi knalpot
mobil dalam kondisi idle. Telah diketahui bahwa bunyi knalpot juga sangat bervariasi baik itu knalpot sepeda motor atau knalpot mobil. Dapat diambil beberapa contoh
variasi knalpot sepeda motor contoh suara knalpot Yamaha RX King, Honda GL Pro,
Tiger, Supra atau Zukuki Satria sangatlah berbeda. Tingkat kebisingannya bervariasi
dari kondisi idle sampai dengan putaran tinggi. Sedangkan untuk mobil misal, knalpot mobil Kijang, Mazda, BMW, Mercedes, Peagueot, Altis dan lain sebagainya.
Semua mobil ini mempunyai variasi bunyi yang berbeda-beda baik dalam keadaan
idle maupun dalam keadaan putaran tinggi.
Khususnya pada penelitian ini peneliti mengambil sampel suara knalpot mobil
Toyota Kijang. Suara knalpot mobil ini yang dianalisa dengan teknik kondisi idle
yang kemudian bunyi tersebut diminimalisir atau direduksi.
Penelitian Aktif Kendali Kebisingan dengan objek Knalpot masih tergolong
jarang diteliti sebelumnya. Oleh karena itu pada penelitian ini peneliti mencoba
melakukan terobosan baru pada penelitian Aktif Kendali Kebisingan ini dengan objek
Knalpot. Penelitian mengenai Aktif Kendali Kebisingan sebelumnya banyak
mengarah kepada Aktif Kendali Kebisingan yang masih bersifat umum.
Antara lain dari penelitian Aktif Kendali Kebisingan yang bersifat umum
Gambar 1.1 Ilustrasi kebisingan pada roda kereta api yang akan di deteksi kebisingannya dengan kondisi penempatan mikropon maya
[1]
Pada gambar 1.1 menunjukan ilustrasi penempatan mikropone maya di roda
kereta api untuk mendeteksi kebisingan yang terdapat pada roda kereta tersebut.
Pada gambar 1.2 adalah lingkup batasan pada penempatan loudspeaker yang ditentukan jaraknya guna mempropagasi sinyal suara yang telah dideteksi oleh
mikropone yang telah di letakkan pada roda kereta api.
Gambar 1.3 Ruang Kontrol pendeteksian kebisingan roda kereta api [1]
Pada gambar 1.3 merupakan ruang kontrol untuk proses pengambilan data
kebisingan yang terjadi pada roda kereta api. Ruang kontrol ini adalah sebuah
ruangan yang kedap suara yang berfungsi agar tidak ada interferensi suara dari luar
yang mana jika terjadi interferensi suara sangat mempernagaruhi pemrosesan sinyal
Gambar 1.4 Sumber kedua (secondary source) dan penembatan mikropon untuk pendeteksian pengukuran [1]
Gambar 1.4 memperlihatkan bagaimana sumber utama yaitu roda kereta api di
lawan dengan secondary source yang merupakan suara dari pembagkit yang kemudian tangkap oleh mikropon sebagai sensor untuk di ukur dan di proses pada
[image:32.612.174.499.448.680.2]ruang kontrol yang terlihat pada gambar 1.3.
Pada gambar 1.5 bagian control dan speaker berfungsi sebagai anti signal
yang pancarkan oleh noise referensi yang kemudian dikuatkan oleh amplifier
kemudian didistribusikan ke LPF (Low Pass Filter), selanjutnya di ubah oleh ADC
(Analog Digital Converter) yang kemudian di olah dengan PC (Personal Computer)
dimana dari komputer di ubah lagi ke DAC (Digital Analog Converter) yang
dikuatkan oleh ampplifier lagi yang berfungsi sebagai counternoise reference.
Proses pada ruang kontrol tersebut adalah merupakan proses pereduksian
sinyal kebisingan yang terjadi pada roda kereta api. Teknik Aktif Kendali Kebisingan
sistem mikropon maya ini adalah tetap memproses propagasi dua sinyal yaitu
primary dan secondary yang bertujuan dengan propagasi dua sinyal tersebut akan menuju pada quite zone. Dimana dengan sinyal yang akan dihasilkan mendekati quite zone maka reduksi noise akan didapatkan.
Penelitian lainnya mengenai Aktif Kendali Kebisingan adalah New FIR filter-based adaptive algorithms incorporating with commutationerror to improve active noise control performance [2]. Studi ini mempertimbangkan suatu kesalahan kaedah umpan balik (CE/Commutation Error) yang diakibatkan oleh suatu rangkaian pada
Aktif Kendali Kebisingan yang nyata, yang kemudian dibandingkan dengan tahapan
derivasi. Tahapan itu adalah penyesuaian algoritma-algoritma baru yang
dikembangkan sebagai fungsi FxLMS/CE (filtered-x least mean square ), dimana
FxNLMS/CE bertujuan untuk menghapuskan gangguan kesalahan kaedah umpan
balik agar dapat menyesuaikan dengan algoritma pada aplikasi Aktif Kendali
menunjukan ke konvergenan dengan tujuan memeperoleh penyesuaian algorima baru
ketika dibandingkan dengan algoritma lama. Hasil terbaik dari algoritma FxRLS/CE
adalah dapat memperoleh 2 s sampai kepada rentang konvergen 34 dB, rentang ini
adalah reduksi yang diperoleh melalui Sound Pressure Level dengan menggunakan white nois. Data penelitian ini meliputi kesalahan kaedah umpan balik
(CE/Commutation Error) menuju FIR (finite-impulse-response) sebagai penyesuaian
algoritma yang menyeluruh pada Aktif Kendali Kebisingan yang akan di capai
melalui kecepatan konvergen dan tingkatan reduksi.
Gambar 1.6 Blok Diagram Sistem Aktif Kendali Kebisingan [2]
Pada gambar 1.6 dapat kita amati bahwa sinyal input yang dihasilkan oleh
Primary-Path akan di propagasikan dengan sinyal input yang di hasilkan oleh
Gambar 1.7 Blok Diagram algoritma FxLMS/CE (switch on) dan FxLMS (switch off) [2]
Pada gambar 1.7 adalah proses algoritma bagian Secondary-Path, dimana pada proses Secondary-Path inilah fungsi untuk mereduksi dengan teknik Aktif Kendali Kebisingan. Algoritma ini dengan menggunakan FxLMS/CE (filtered-x least
mean square ) dengan switch on dan switch off. On dan off inilah yang mengatur
FxLMS/CE (filtered-x least mean square ) sehingga Secondary-Path dapat menghasilkan anti signal guna mereduksi kebisingan.
1.2 Perumusan Masalah
Kajian tulisan ini adalah Aktif Kendali Kebisingan, dimana dalam bahasa
awamnya suara dilawan dengan suara sehingga faktor kebisingan dapat diminimalisir.
Generator) dan alat Penggeser Fasa (Phase Shifter) yang berfungsi sebagai pelawan
Sinyal Bising Sumber .
1.3 Tujuan Penelitian
1.3.1 Tujuan Umum
Simulasi pemrosesan sinyal Aktif Kendali Kebisingan (Active Noise Control)
pada Knalpot (noise silencer).
1.3.2 Tujuan Khusus
1. Merancang prototipe dari Pembangkit Sinyal Bising yang dapat
menghasilkan sinyal tegak (standing wave) dari suatu sinyal bising.
Sinyal tegak (standing wave) tersebut dapat diatur frekuensi dan
amplitudonya dengan menggunakan potensio meter yang dihasilkan
oleh rangkaian Pembangkit Bising.
2. Merancang prototipe pemrosesan sinyal yang dapat menggeser fasa
(Phase Shifter) dimana dengan pergeseran fasa ini maka sinyal dapat
di-tuning frekuensinya agar dapat membalikkan fasa 1800. sehingga menghasilkan sinyal lawan dan anti sinyal di dapatkan. Dimana tujuannya adalah untuk melawan sinyal bising knalpot agar kebisingan
dapat tereduksi.
3. Simulasi Sinyal Aktif Kendali Kebisingan sistem untuk meredam
perhitungan Transformasi Fourier yang membandingkan hasil data bising dari Knalpot dengan data rangkaian Pembangkit Sinyal Bising.
1.4 Manfaat Penelitian
BAB 2
TINJAUAN PUSTAKA.
2.1 Asal Perambatan dan Kecepatan Bunyi
Kata bunyi mempunyai dua definisi: (1) Secara fisis, bunyi adalah
penyimpangan tekanan, pergeseran partikel dalam medium elastik seperti udara. Ini
adalah bunyi-obyektif. (2) Secara fisiologis, bunyi adalah sensasi pendengaran yang
disebabkan penyimpangan fisis yang digambarkan. Ini adalah bunyi subyektif.
Gambar 2.1 Garpu tala yang dipukul menghasilkan perubahan tekanan udarakarena getarannya dan menghasilkan bunyi[3]
Rambatan gelombang bunyi disebabkan oleh lapisan perapatan dan
peregangan partikel-partikel udara yang bergerak ke arah luar, yaitu karena
penyimpangan tekanan dan getaran yang terjadi pada subjek yang di pukul (lihat
gambar 2.1). Ini sama dengan penyebaran gelombang air pada permukaan suatu
Partikel-partikel udara yang meneruskan gelombang bunyi tidak berubah posisi
normalnya; mereka hanya bergetar sekitar posisi kesetimbangannya, yaitu posisi
partikel bila tak ada gelombang bunyi yang diteruskan. Penyimpangan tekanan
ditambahkan pada tekanan atmosfir yang kira-kira tunak' (steady) dan ditangkap oleh telinga.
Gambar 2.2 Konstruksi Telinga manusia dalam menangkap bunyi [4]
Pada gambar 2.2 adalah merupakan ilustrasi bagaimana telinga manusia
menangkap bunyi dari sumber suara, telihat proses dari Eardum menuju Cochlea yang berakhir pada Brain sebagai pengolah bunyi yang telah di dengar.
Suara nyanyian atau instrumen musik memancarkan beberapa ratus atau
bahkan ribu mikrowatt daya akustik. Hal ini menjelaskan bagaimana mudahnya
seorang penyanyi atau pemusik mengisi volume suatu auditorium yang terlampau
Jika tekanan gelombang bunyi yang berubah mencapai telinga luar, getaran
yang diterima gendang telinga diperbesar oleh tulang-tulang kecil di telinga tengah
dan diteruskan lewat cairan ke ujung-ujung saraf yang berada di telinga dalam. Saraf
akhirnya meneruskan impuls ini ke otak, di mana proses mendengar tahap terakhir
terjadi dari sensasi bunyi tercipta.
Tingkat tekanan bunyi minimum yang mampu membangkitkan sensasi
pendengaran di telinga pengamat disebut ambang kemampuan mendengar. Bila
tekanan bunyi ditambah dan bunyi menjadi lebih keras, akhirnya ia mencapai suatu
tingkat dimana sensasi pendengaran menjadi tidak nyaman. Tingkat tekanan bunyi
minimum yang merangsang telinga sampai suatu keadaan di mana rasa tidak nyaman
menyebabkan rasa sakit tertentu disebut ambang rasa sakit. Antara kemampuan
didengar dan rasa sakit tekanan bertambah sejuta kali. Ini menunjukkan jangkauan
tekanan bunyi yang ditanggapi telinga sangat lebar.
Jelas bahwa kepekaan telinga berubah dengan nyata bila bunyi berbeda
frekuensinya. Dari kurva ambang kemampuan dengar dapat dilihat bahwa pada 1000
Hz tingkat tekanan bunyi minimum sekitar 4 dB diperlukan untuk hampir tidak
didengar telinga sedangkan pada 63 Hz telinga tidak akan bereaksi terhadap bunyi
apapun kecuali bila tekanannya mencapai tingkat minimum kira-kira 35 dB. Sampai
tingkat tertentu kita tuli terhadap bunyi frekuensi rendah. Kepekaan telinga kita yang
berkurang dalam jangkauan frekuensi rendah menguntungkan, karena hal ini
menghindarkan kita dari gangguan yang disebabkan bunyi frekuensi rendah di dalam
ter-hadap bunyi dalam jangkauan sekitar 400 sampai 5000 Hz, yaitu frekuensi yang
penting untuk inteligibilitas pembicaraan dan kenikmatan musik yang sempurna.
Kecepatan rambat gelombang bunyi pada temperatur ruang 68°F (20°C)
adalah sekitar 1.130 ft per sekon (344 m per sekon). Dalam pembahasan telah
ditunjukkan bahwa kecepatan bunyi yang relatif rendah inilah yang menyebabkan
cacat akustik seperti gaung (pemantulan yang berkepanjangan), gema dan dengung
yang berlebihan [3].
Bunyi merupakan gelombang atau dalam istilah tekniknya kita menyebutkan
sinyal. Sinyal bunyi tersebut dapat kita lihat seperti gambar 2.3 Sinyal bunyi
merupakan gelombang sinusoidal. Kemudian jika sinyal bunyi itu didiskritkan maka
tampaklah sinyal tersebut seperti yang tertera pada gambar 2.3 sebelah kanan dimana
terlihat sinyal sudah berupa garis-garis dan ini yang dinamakan pengolahan sinyal
bunyi yaitu dengan mendiskretkan sinyal tersebut.
Tahapan diskret sinyal tersebut dapat dilihat pada gambar 2.3 terlihat bahwa
tahapan pertama adalah sinyal berbentuk sinusoidal yang kemudian beralih kepada
sinyal berbentuk eksponensial dan dilanjutkan kepada sinyal square dan diakhiri dengan sinyal sinusoidal yang tereksponensial yang begitu berfluktuasi dengan
amplitudo yang sangat acak.
Dari semua sinyal tersebut dapat dicuplik atau disamplingkan atau dalam
istilah matematikanya pendiskretan sinyal. Pendiskretan ini bertujuan untuk
Sinyal yang paling sederhana adalah standing wave. Yaitu sinyal yang berbentuk
[image:43.612.153.536.196.543.2]sinussoidal, dapat dilihat pada gambar 2.4, 2.5, dan 2.6.
Gambar 2.4 Sinyal tegak [6]
Gambar 2.4 menunjukan bagaimana kerapatan gelombang berjalan dan
bagaimana Sound Pressure yang terjadi pada standing wave. Dapat dilihat juga dari simulasi tentang kerapatan frekuensi pada proses terjadinya Sound Pressure tersebut.
Proses ini telah disimulasikan oleh ISVR (Institut of Sound and Vibration
Gambar 2.5 Sinyal tegak dengan panjang gelombangnya pada perbedaan frekuensi [6]
Pada gambar 2.5 dapat dilihat panjang gelombang pada frekuensi tinggi dan
panjang gelombang pada frekuensi rendah berbeda. Pada panjang gelombang
frekuensi rendah kerapatan medianya lebih jarang sehingga jarak antara satu puncak
gelombang ke puncak gelombang lain lebih jauh jika dibandingkan dengan panjang
gelombang pada frekuensi tinggi. Pada frekuensi tinggi jarak antara satu puncak
dengan puncak lainnya lebih dekat dikarenakan kerapatannya yang lebih.
Dengan Sound Pressure Level yang sama namun frekuensi yang berbeda
.
Gambar 2.6 Sinyal tegak dengan panjang gelombang pada perbedaan kecepatannya [6]
Pada gambar 2.6 dapat dilihat persamaan frekuensi dan perbedaan percepatan
pada Sound Pressure Level yang terjadi pada Long Wavelength dan Short Wavelength.
Frekuensi dan kecepatan rambatan bunyi
(detik) waktu
t
(2.1) (Hz)
frekuensi f
Hz t
1 f
Pergerakan kecepatan gelombang bunyi berbeda pada tiap media, seperti pada
udara, gas atau air. Cepat rambat bunyi bergantung pada kerapatan, suhu dan tekanan
media udara. ) 2 . 2 ( detik m P
cg= a
atau (K) Suhu T ) (Kg/m Kerapatan (Pa) Atmosfer Tekanan Pa 1.41) udara (untuk spesifik panas Rasio (m/det) bunyi rambat Cepat cg : dimana (2.3) det m T 20.05 cg 3 = = = = = = =
Pada media padat bergantung pada modulus elastisitas dan kerapatan,
sedangkan pada media tidak padat bergantung pada modulus Bulk dan kerapatan.
Intensitas dan Kecepatan Partikel Bunyi di udara (2.5) m W A W
I= 2
) (m Area Luas A (Watt) Akustik Daya W ) m W ( Bunyi Intensitas I : dimana 2 2 = = =
Intensitas bunyi yang dapat dideteksi manusia adalah 10-6 W/cm2, maksimum yang dapat diterima tanpa menyebabkan kerusakan adalah sekitar 10-3 W/cm2.
Kecepatan partikel adalah radiasi bunyi yang dihasilkan sumber bunyi akan
mengelilingi udara sekitarnya.
Untuk menghitung panjang gelombang dapat dicari dengan persamaan : (2.7) meter f c = = ft) (1128 340m/det udara di bunyi rambat Kecepatan c (1/det) Frekuensi f (m) gelombang rambat Panjang : dimana = = =
Maka panjang gelombang akustik adalah:
) 8 . 2 ( ft f 1128 =
Tingkat kebisingan suara yang terlalu besar disebutkan directivity. Ini terjadi
karena penjalaran media yang bebas. Ini dapat di tunjukan pada gambar dibawah,
terlihat bagaimana penjalaran SPL (Sound Pressure Level).
Kemudian kita dapat melihat sumber suara pada suatu ruangan dengan
beberapa variasi.
Diketahui perambatan Sound Pressure Level adalah:
2.2 Perambatan Bunyi pada Media
Bunyi dapat merambat pada tiga media.
1. Udara/gas
2. Air/cairan
3. Benda Padat
Laju Bunyi pada beberapa Material pada 200C & 1 Atm
Tabel 2.1 Kelajuan Bunyi pada Material
No Material Laju Bunyi (m/s)
1 Udara 343
2 Udara (00 C) 331
3 Helium 1005
4 Hydrogen 1300
5 Air 1440
6 Air Laut 1560
7 Besi & Baja ≈5000
8 Kaca ≈4500
9 Aluminium ≈5100
10 Kayu Keras ≈4000
Sumber : Giancolli, Douglas. Physiscs Third Edition. New Jersey : Prentice Hall Englewood Cliffs
Dari tabel 2.1 kita dapat melihat bahwa kelajuan bunyi pada setiap material
berbeda. Pada udara sangar ditentukan oleh kelembaman, meskipun pada material
lainnya suhu cukup menentukan namun pada udara sangat mempengaruhi.
Khususnya pada material padat laju bunyi lebih tinggi ini dipengaruhi oleh
ikatan kimia setiap material yang cukup menetukan kelajuan bunyi. Diketahui
Aluminium adalah salah satu material yang menjadi media kelajuan bunyi cukup
tinggi.
No Sumber Suara Intensity (dB)
Intensity (W/m2)
1 Jet Plane pada 30 m 140 100
2 Ambang Sakit 120 1
3 Kekuatan konser Rock di udara terbuka 120 1
4 Sirene pada 30 m 100 1x10e-2
5 Auto Interior, bergerak pada 90 km/jam 75 3x10e-5
6 Kesibukan /kemacetan jalan 70 1x10e-5
7 Percakapan biasa pada 50 cm 65 3x10e-6
8 Radio tenang 40 1x10e-8
9 Bisikan 20 1x10e-10
10 Desir Daun 10 1x10e-11
11 Ambang Pendengaran 0 1x10e-12
Sumber : Giancolli, Douglas. Physiscs Third Edition. New Jersey : Prentice Hall Englewood Cliffs
2.2.1 Aktif Kendali Kebisingan
Untuk Aktif Kendali Kebisingan bahasa awamnya adalah suara melawan
suara yaitu penjelasannya adalah dengan metode sinyal yang telah kita dapatkan
harus kita cari anti sinyalnya yaitu yang serupa dengan sinyal awal tapi berlawanan fasa.
Dapat kita lihat contoh pada uraian gambar 2.7 dijelaskan sinyal Tegak
Amplitudo rendah dengan kondisi tanpa suara.
Gambar 2.8 Gelombang Tegak High Amplitudo [7]
Dari perbandingan gambar 2.7 dan 2.8 dapat dilihat bahwa amplitudo dalam
keadaan diam dengan keadaan amplitudo rendah dan tinggi. Dan terlihat pada
amplitude rendah tidak mempunyai bunyi untuk amplitude tinggi bunyi nyaring.
Gambar 2.9 Gelombang Tegak pada pergeseran fasa [7]
Pada gambar 2.9 diperlihatkan pergeseran fasa yang berfluktuasi terhadapat
waktu. Dimana dengan pergeseran fasa tersebut akan terjadi interferensi bunyi yang
Gambar 2.10 Dua buah gelombang tegak dengan perbedaan fasa 1800 saling meniadakan [7]
Pada gambar 2.10 diperlihatkan dua bunyi yang berbeda fasa 1800 yang saling meniadakan yang akan menuju kuadran tidak ada bunyi sama sekali.
t
ω
Gambar 2.11 Sinyal Sumber atau Sinyal 1
Pada gambar 2.11 diperlihatkan sebuah sinyal sumber atau sinyal 1 dalam suatu
sistem Aktif Kendali Kebisingan.
Dimana persamaan yang ditunjukan adalah :
t sin A
t
ω
Gambar 2.12 Sinyal Lawan atau Sinyal 2
Pada gambar 2.12 ditunjukan sinyal lawan atau sinyal 2 dari suatu sistem Aktif
Kendali Kebisingan.
Dimana persamaan yang ditunjukan adalah :
t sin A
y2 =− ϖ (2.11)
t
ω
Gambar 2.13 Aktif sinyal
Pada gambar 2.13 adalah merupakan Aktif Sinyal, dimana sinyal 1 dan sinyal 2
Maka persamaan dari penggabungan Sinyal Awal/Sinyal 1 dengan Sinyal
Lawan/Sinyal 2 adalah :
2 1 noise
aktif
y
y
Y
=
+
(2.12)
0
t
sin
A
t
sin
A
Y
aktifnoise=
−
=
ϖ
ϖ
Sinyal suara mempunyai bentuk kontur yang sangat rumit dan sangat acak. Itu
terjadi karena pergeseran fasa yang sangat rapat sehingga menyulitkan pendeteksian
jika hanya memakai peralatan yang sederhana. Dasar dari pergeseran phasa pada
sinyal bunyi dapat kita lihat pada gambar 2.14 yaitu dari langkah I sampai IX
perioda (T) mengalami perubahan dari ¼ T pertama sampai dengan ¼ T ke sembilan.
Pada perubahan yang terjadi inilah pergesaran fasa tersebut bergerak.
Dari gambar 2.14 dapat dilihat pada step I ¼ T kemudian amplitude pada
posisi 2. Pada step II ¼ T kemudian amplitude bergeser pada posisi 2. Pada step III ¼
T kemudian amplitude bergeser pada posisi 4. Pada sep IV ¼ T kemudian amplitude
berada pada posisi 5. Pada step V ¼ T kemudian amplitude berada kembali pada
posisi 2 namun pada posisi 12 amplitudo negative lebih negative jika dibandingkan
pada step 2. Pada step VI ¼ T kemudian amplitude kembali pada posisi 3 namun
pada posisi 10 ke 15 sinyal datar atau flat. Pada step VII ¼ T kemudian amplitude sama dengan step 3 kembali pada posisi 4 namun pada posisi 12 amplitudo naik
pada posisi 5 namun pada posisi 8 sampai 15 sinyal datar atau flat. Pada step IX ¼ T kemudian amplitude sama dengan step 2 dan 5 pada posisi 2 namun pada posisi 8
amplitudo negatif curam dan amplitudo pada posisi 11 tinggi.
Begitulah fluktuasi sinyal yang bergerak. Sangat rumit dan acak sehingga
untuk mendeteksinya diperlukan pendekatan perhitungan yang baik untuk
mendapatkan hasil yang maksimal.
Uraian Aktif Kebisingan juga dapat kita lihat dari tampilan sinyal yang telah
berfluktuasi pada gambar 2.15, 2.16, dan 2.17.
Gambar 2.15 Sinyal Aktif Kebisingan [9]
Gambar 2.15 memperlihatkan flukstuasi SPL terhadap frekuensi, dan
fluktuasi sinyal suara ini adalah perbesaran dari sinyal realnya. Dikarenakan sinyal
real dari suatu bunyi sangat bersifat acak. Dan gambar 2.15 adalah salah satu teknik
untuk bisa mendapatkan sinyal secara lebih jelas dari keacakan sinyal bunyi yang
Gambar 2.16 Sinyal Aktif Kebisingan dengan gradasi warna [9]
Gambar 2.16 menunjukan bagaimana Secondary Sound atau Sinyal Lawan mereduksi noise yang ada pada Primary atau Sinyal Sumber plus Secondary Sound. Terlihat warna mendekati 0 atau telah tereduksi. Disini Secondary Sound tidak ditampilkan oleh ISVR (Institut of Sound and Vibration Research) karena boleh jadi
itu merupakan kode etik rahasia yang tidak boleh di publikasikan.
ISVR (Institut of Sound and Vibration Research) adalah merupakan salath
Gambar 2.17 Sinyal Aktif Kendali Kebisingan yang sangat acak [10]
Gambar 2.17 adalah ilustrasi dari kerumitan atau keacakan sinyal bunyi yang
begitu dinamis.
Beberapa referensi dari penelitian yang telah diteliti oleh banyak orang
tentang Aktif Kendali Kebisingan (Active Noise Control), seperti penelitian tentang
pengurangan kebisingan dengan menggunakan Active Noise Control System. Sinyal pada satu chanel Aktif Kendali Kebisingan telah mengurangi noise pada frekuensi
rendah dengan nilai -10,72 dB. Sistem ini tidak stabil ketika sinyal noise terus menerus berubah. Frekuensi Noise ini bervariasi pada perpindahan objek dalam suatu
dihasilkan juga sangat relative untuk menghasilkan area perubahan yang besar.
Dilihat dari set up alatnya pada gambar 2.18 [10].
Gambar 2.18 Konfigurasi Hardware pada Aktif Kendali Kebisingan [10]
Dapat dilihat pada gambar 2.18 letak posisi dari sumber bising yang
digantung dimana kemudian diberikan anti noise dari suara yang di sesuaikan dengan suara dari sumber bising.
Juga dapat dilihat pada gambar 2.19 bentuk propagasi dua sinyal yaitu sinyal
sumber noise dan sinyal lawan, dimana kemudian kedua sinyal itu saling
berpropagasi yang akhirnya saling meniadakan atau minimal tereduksi.
Gambar 2.20 Blok Diagram Single Chanel Sistem Aktif Kendali Kebisingan [10] Pada gambar 2.20 dapat dilihat blok diagram dari single chanel Aktif Kendali
Kebisingan, kita dapat melihat input dan output dari sinyal yang juga menggunakan
feedback untuk memperjelas dan memperkuat sinyal.
Pada penelitian tentang Aktif Kendali Kebisingan terhadap vacum cleaner
sasaran kuat bunyi yang terbaik dalam pencapaian prototip Aktif Kendali Kebisingan
system adalah 4.2477 dB. Sedangkan pada simulasi reduksi sinyal yang dihasilkan
optimalnya dibawah 6 dB. Radiasi bising pada vacum cleaner adalah langsung dari sumber. Hal ini yang membuat kesulitan pada penelitian dalam menset up mikropone
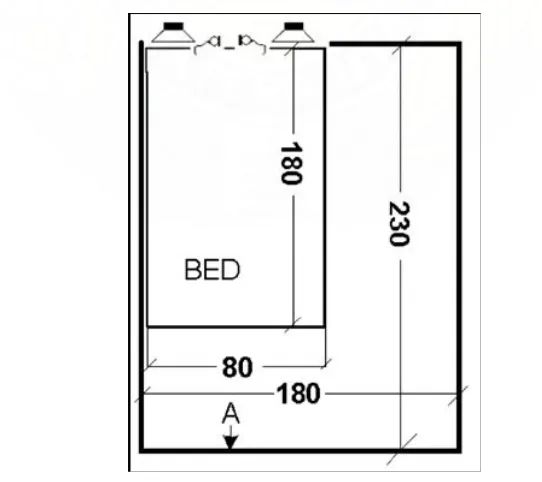
Gambar 2.21 Aktif pelindung telinga dari sumber kedua [11]
Pada gambar 2.21 terlihat bagaimana cara melindungi telinga dari sumber
[image:61.612.178.453.117.343.2]yang merupakan sinyal sumber.
Gambar 2.22 Blok Diagram Sistem satu chanel Aktif Kendali Kebisingan [11]
Pada gambar 2.22 ditunjukan blok diagram sistem satu chanel Aktif Kendali
Pada penelitian penekanan frekuensi rendah kebisingan atau getaran pasif
mempunyai banyak kerugian, sebagian besar oleh karena menyangkut volume
peredam tersebut. Dengan menggunakan metode pengolah sinyal kemungkinan untuk
menggunakan Aktif Kendali Kebisingan bisa tercapai. Kebisingan sekunder (yang
buatan) harus dihasilkan, yang akan melemahkan kebisingan yang primer (yang
sesungguhnya) ini dapat dilihat pada gambar 2.23. [12]. Terlihat bahwa kebisingan
sekunder mengcounter kebisingan primer yang sesungguhnya. Dimana kebisingan
sekunder adalah diwakili oleh loudspeaker sementara kebisingan primer diwakili oleh jam beker. Sinyal dari sekunder (loudspeaker) dipancarkan kemudian ditangkap oleh
mikropon dimana dengan bersamaan sinyal dari primer (jam beker) dipancarkan juga
[image:62.612.124.508.383.679.2]kemudian ditangkap oleh mikropon juga.
Gambar 2.24 Sistem Kerja Aktif Kendali Kebisingan [12]
Gambar 2.24 Menjelaskan tentang Sistem Aktif Kendali Kebisingan bekerja
dengan menggunakan Analoge Digital Converter dan Digital Analoge Converter. Modeling dan disain pengontrol dirancang dengan prosedur untuk suatu FB-
sistem bunyi Aktif Kendali Kebisingan. Sinyal akustik diperagakan sebagai gelombang bunyi yang dikendalikan dengan singkat. Suatu umpan balik pengontrol
dirancang yang kemudian untuk mengurangi noise yang ada di sekitar, dengan
menggunakan sensor kesalahan yaitu H8 untuk mengendalikan teori berdasar pada
IIR model. Efektivitas prosedur disain yang diusulkan dipertunjukkan dalam test
percobaan. Suatu bidang bunyi telah diasumsikan dalam studi ini. Kemudian didisain
suatu pengontrol dan modeling sistematis untuk memeriksa prosedur suatu bidang
Gambar 2.25 Konfigurasi SISOSE FF- Sistem Aktif Kendali Kebisingan [13]
Pada gambar 2.25 menjelaskan bagaimana suatu Aktif Kendali Kebisingan
dengan menggunakan sensor sinyal.
Gambar 2.26 Konfigurasi Percobaan Aparatus [13]
Pada gambar 2.26 menjelaskan konfigurasi atau set up dari Aktif Kendali
Kontribusi penelitian ini menunjukkan asal usul FXLMS struktur untuk
implementasi pada suatu titik yang tetap menjalankan pada tekanan induksi rata-rata
pada sebuah suara. Implementasi dievaluasi dengan keadaan online dan dicapai pada
titik tetap FXLMS adalah 20dB ke 30dB pada interval frekwensi 100Hz ke 375Hz
karena lebar bandwith kebisingan 60dB dan distorsi suara (sinusoidal 200Hz). Implementasi alat ini layak digunakan untuk mengatasi tekanan suara tinggi.
Penerapan algoritma dilakukan dalam Aktif Kendali Kebisingan akustik. Kemudian
diperoleh dari aplikasi untuk Aktif Kendali Kebisingan tentang kebisingan dan
getaran pada suatu mesin bubut. Di dalam adaptip feedback alat ini tetap pada titik FXLMS (Filtered-X LMS). Penelitian ini juga menarik untuk lebih lanjut diuraikan
dengan menggunakan kombinasai digital dan analog pada pengendalian kedua daerah
[image:65.612.116.468.409.629.2]yang utama [14].
Pada gambar 2.27 menjelaskan bagaimana mengolah Aktif Kendali Kebisingan
dengan proses Digital Signal Processing. Untuk pelindung pada telinga digunakan Low Power Fixed Point Digital Signal Processor.
Active Control Of Noise Using FXLMS
Gambar 2.28 Aktif Kendali Kebisingan pada telinga ditempatkan pada primary path and forward path [14]
Pada gambar 2.28 merupakan blok diagram Aktif Kendali Kebisingan yang
menggunakan Digital Signal Processor sebagai pengontrol guna melawan Primary Path.
Di dalam aplikasi praktis, metoda Aktif Kendali Kebisingan saling
mempengaruhi dengan nonlinear. Nonlinear pengontrol berdasar pada Volterra
penyaringan yang diterapkan dalam wujud multichannel untuk menyaring data agar dapat digunakan dan dapat dimanfaatkan pada lingkungan. Salah satu dari aspek yang
rumit adalah tentang algoritma adaptasi efisien. Yang pada umumnya, yang disebut
filtered-X LMS atau NLMS adalah merupakan algoritma. Di dalam penelitian ini kita
yang disebut FILTERED-X AP algoritma untuk di gunakan penyaringan kwadrat
homogen. Menurut multichannel pendekatan, asal usul ini dapat dengan mudah diperluas untuk penyaringan Volterra umum. Eksperimen yang lebih jauh kita
laporkan untuk mengkonfirmasikan AP dibandingkan teknik klasik LMS dan NLMS
algoritma dengan suatu peningkatan yang terbatas. Semua ini menyangkut
computational complexity dibandingkan dengan Aktif Kendali Kebisingan akustis. Ini merupakan salah satu aplikasi untuk kendali aktip tentang kebisingan dan getaran di
dalam suatu mesin bubut. Di dalam adaptip kontrol umpan balik getaran di titik tetap
pada FXLMS agar dapat mengontrol tampilan yang sesuai. Penelitian ini juga
menarik untuk ditindaklanjutkan menggunakan penjabaran tentang digital dan analog
[image:67.612.115.495.382.594.2][15].
Gambar 2.29 Single Channel Adaptive Kontrol [15]
Gambar 2.29 Adaptive Kontrol adalah menjelaskan bahwa menggunakan satu
Gambar 2.30 F-X AP adaptive nonlinear control [15]
Pada gambar 2.30 ditunjukan proses control dengan menggunakan
penyesuaian F-X AP non linear. Dimana F-X AP merupakan pengontrol umpan balik.
Penelitian ini memperkenalkan suatu aplikasi kendali tanpa kawat
pengulangan tertutup berdasar pada Berkeley Micaz partikel debu dan Alat Analog
AD21061 EZ-KIT LITE. Sistem merealisasikan Aktif Kendali Kebisingan yang mana
merupakan suatu aplikasi rumit dari alur sinyal. Suatu Pll-Likemechanismtakes
dengan alamat sinkronisasi, dipakai linier sesuai dengan data pengukuran yang tanpa
kawat (wire less system) untuk pengolahan DSP (Digital Signal Processing). Kebisingan dasar pengontrol resonator telah membuktikan efisiensinya di dalam
lingkungan ini. Yang utama adalah untuk menginstal jauh lebih unsur-unsur ( yaitu.
Gambar 2.31 Blok Diagram Sistem Wire Less Aktif Kendali Kebisingan [16]
Pada gambar 2.31 ditunjukan blok diagram sistem wire less Aktif Kendali
[image:69.612.169.494.123.344.2]Kebisingan, yang mana proses sistem menggunakan Digital Signal Processing.
Gambar 2.32 Aktif Kendali Kebisingan problem [16]
Pada gambar 2.32 ditunjukan permsalahan Aktif Kendali Kebisingan yang mana
untuk mengontrol dibutuhkan Filter dengan proses transformasi Z untuk
Gambar 2.33 Periodik perencanaan Aktif Kendali Kebisingan [16]
Pada gambar 2.33 ditunjukan bagaimana periodik Aktif Kendali Kebisingan
berproses dengan menggunakan resonators, dimana primary noise dan secondary noise di inputkan dengan menggunakan referensi sinyal.
Gambar 2.34 Periodik Aktif Kendali Kebisingan diagram [16]
Pada gambar 2.34 adalah merupakan blok diagram Aktif Kendali Kebisingan
Pemrosesan Sinyal
Gambar 2.35 Sinkronisasi blok diagram pemrosesan sinyal Aktif Kendali Bising [16]
Pada gambar 2.35 ditunjukan blok diagram pemrosesan sinyal Aktif Kendali
Kebisingan yang menggunakan controller dan adjustable timer. Dapat dilihat sinyal referensi memasuki S/H kemudian menuju controller dan di adjustable timer. Dimana outputnya masih merupakan sinyal yang sama. Namun umpan balik adjustable timer
merubah bentuk sinyal menjadi gigi gergaji.
2.3 Fourier Series
Teori mengenai FFT (Fast Fourier Transform) yang akan digunakan dalam Pemrosesan Sinyal ini adalah sebagai berikut:
Fungsi f(x) adalah merupakan fungsi periodik jika nilai fungsinya berulang
pada waktu yang tertentu dengan variabel tunggal. Pengulangan waktu tertentu ini
Gambar 2.36 Fungsi dari suatu sinyal dengan perioda [17]
Nyatalah bahwa y = sin nx adalah merupakan fungsi periodik, dimana jarak
nilai x naik dari 00 sampai 3600. Periode 3600 dikatakan 2 radians dan maksimum pergeseran amplitudo dari posisi sandaran, lihat gambar 2.37
[image:72.612.145.468.419.624.2]Definisi Deret Fourier:
Fungsi f (x) yang dapat ditentukan pada interval (-L,L) dan di luar interval
dan diluar interval ii ditentukan pleh f(x + 2L), yaitu dianggap bahwa f(x)
mempunyai periode 2L. Deret Fourier atau ekspansi fourier yang sehubungan
dengan f(x) tadi didefinisikan sebagai:
) L n sin b L n cos a ( 2 a n n 1 n
0 +
∑
+∞
=
(2.13)
Dengan harga-harga koefisien Fourier an dan bn ditentukan oleh:
. ... 0,1,2,.... n dx L n f(x)sin L 1 b dx L n f(x)cos L 1 L L n L L n = = =
∫
∫
− − a (2.14)Deret Fourier juga merupakan penurunan persamaan matematik bentuk
gelombang tegangan dan menentukan besar amplitude .
Setiap fungsi periodik f( t) dapat diuraikan menjadi deret trigonometri tak
terhingga dan disebut deret Fourier. Supaya dapat diuraikan menjadi deret Fourier,
fungsi tersebut harus memenuhi kondisi sebagai berikut:
Fungsi tersebut merupakan fungsi periodik dan memenuhi relasi f ( t ) = f
Ambil suatu fungsi periodik f ( t) maka deret Fourier untuk fungsi tersebut
pada rumusan :
[
]
∑
∞ = + + = + + + + + + + + = 1 n n n 0 3 2 1 3 2 1 0 sin(n in B t) cos(n A A t) f( (2.15) ... t) sin(3 B t) sin(2 B t) sin( B ... cos(3 os A cos(2 os A cos( os A A t) f( ω ω ω ω ω ωA0, An, dan Bn disebut koefisien Fourier dan ditentukan dengan
rumus :
∫
= 2
0
0 f( t) d( t)
2 1
A ϖ ϖ (2.16)
∫
= 2
0
n f( t)cos(n t)d( t) 2
1
A ϖ ϖ ϖ (2.17)
∫
= 2
0
n f( t)sin(n t)d( t) 2
1
B ϖ ϖ ϖ (2.18)
.. 1,2,3... n : dimana =
Untuk menyederhanakan perhitungan Deret Fourier, adalah dengan
menggunakan tabel Transformasi Fourier. Tabel Tranformasi Fourier ini beragam
bentuk, namun peneliti mengambil bentuk yang paling sederhana dari sinyal yang
akan di proses.
Betuk ini masih merupakan bentuk sinusoidal, yaitu dengan memotong
Tabel 2.3 Transformasi Fourier ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ = = +∞ + ∞ − +
∫
( ) { ( )} ) 2 1 ( ) ( ) ( y F FT dy e y F x f x f ixy π ⎢⎣⎡ = = − ⎥⎦⎤ ∞ + ∞ − −∫
( ) { ( )} ) 2 1 ( ) ( ) ( y F FT dy e x F y f y f ixy π[Gaussian] x a A exp(− 2 2)
1/a A
2a
a A π
[Gaussian] a y a A ) 4 exp( 2 2 − π
Sumber: Champeney, D.C. Fourier Transform and Their Physical Application: Academic Press, Inc.
Pada penelitian ini perhitungan Fourier yang gunakan adalah Transformasi Fourier
dengan menggunakan tabel diatas yaitu dengan persamaan dari tabel:
{ }
F(y)
(
2
.
19
)
FT
dy
e
F(y)
2
1
f(x)
ixy⎥⎦
⎤
⎢⎣
⎡
=
∞=
+ ∞ − +∫
Yang kemudian kita gunakan persamaan sinyalnya untuk meghitung adalah:
) x a
Aexp(− 2 2 (2.20)
2.4 Uraian Aktif Kendali Kebisingan
Ada beberapa cara untuk mengurangi kebisingan yang dipancarkan oleh suatu
sumber bunyi di dalam suatu ruang. Satu pendekatan baku terdiri dari penyerapan
suara bising pasif, yaitu mencakup dinding dengan material seperti glassfibre mantel. Material ini menyerap energi akustik ke dalam panas dan demikian berperan untuk
pengurangan kebisingan, tetapi material ini bekerja terbaik pada frekuensi tinggi
(diatas 5000 Hz). Aktif Kendali Kebisingan Sistem telah dikembangkan untuk
mengatasi strategi pasif pada frekuensi rendah (di bawah 1000 Hz).
2.4.1 Mekanisme dan Cara kerja
Aktif Kendali Kebisingan adalah den
![Gambar 1.5 Setting Hardware dan Software pada distribusi sinyal [1]](https://thumb-ap.123doks.com/thumbv2/123dok/464840.50582/32.612.174.499.448.680/gambar-setting-hardware-dan-software-pada-distribusi-sinyal.webp)
![Gambar 2.4 Sinyal tegak [6]](https://thumb-ap.123doks.com/thumbv2/123dok/464840.50582/43.612.153.536.196.543/gambar-sinyal-tegak.webp)

![Gambar 2.22 Blok Diagram Sistem satu chanel Aktif Kendali Kebisingan [11]](https://thumb-ap.123doks.com/thumbv2/123dok/464840.50582/61.612.178.453.117.343/gambar-blok-diagram-sistem-chanel-aktif-kendali-kebisingan.webp)
![Gambar 2.23 Setting Sistem Aktif Kendali Kebisingan [12]](https://thumb-ap.123doks.com/thumbv2/123dok/464840.50582/62.612.124.508.383.679/gambar-setting-sistem-aktif-kendali-kebisingan.webp)
![Gambar 2.24 Sistem Kerja Aktif Kendali Kebisingan [12]](https://thumb-ap.123doks.com/thumbv2/123dok/464840.50582/63.612.125.517.120.373/gambar-sistem-kerja-aktif-kendali-kebisingan.webp)
![Gambar 2.27 Aktif Kendali Kebisingan [14]](https://thumb-ap.123doks.com/thumbv2/123dok/464840.50582/65.612.116.468.409.629/gambar-aktif-kendali-kebisingan.webp)
![Gambar 2.29 Single Channel Adaptive Kontrol [15]](https://thumb-ap.123doks.com/thumbv2/123dok/464840.50582/67.612.115.495.382.594/gambar-single-channel-adaptive-kontrol.webp)
![Gambar 2.30 F-X AP adaptive nonlinear control [15]](https://thumb-ap.123doks.com/thumbv2/123dok/464840.50582/68.612.186.480.118.336/gambar-f-x-ap-adaptive-nonlinear-control.webp)
