i
SISTEM PARKIR ROBOT OTOMATIS MENGGUNAKAN AGV
TUGAS AKHIR
Program Studi S1 Sistem Komputer
Oleh :
MOCHAMMAD KHOIRUL 11.41020.0062
FAKULTAS TEKNOLOGI DAN INFORMATIKA
xi
HALAMAN JUDUL ... i
HALAMAN SYARAT ... ii
MOTTO ... iii
HALAMAN PERSEMBAHAN ... iv
HALAMAN PENGESAHAN ... v
HALAMAN PERNYATAAN ... vi
ABSTRAK ... vii
KATA PENGANTAR ... viii
DAFTAR ISI ... xi
DAFTAR GAMBAR ... xiv
DAFTAR TABEL ... xvii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang Masalah ... 1
1.2 Rumusan Masalah ... 3
1.3 Batasan Masalah ... 3
1.4 Tujuan ... 4
1.5Sistematika Penulisan ... 4
BAB II LANDASAN TEORI ... 6
2.1 AGV (Autometed Guide Vehicle) ... 6
xii
2.3.1 Pengertian ARM CortexM4 ... 9
2.3.2 Arsitektur STM32F4 Discovery ... 10
2.4 Rotary Encoder ... 13
2.4.1 Rotary Encoder Omron E6A-2C ... 13
2.5 RFID (Radio Frequency IDentification) ... 14
2.5.1 RFID ... 14
2.5.2 RFID Reader ID-12 ... 16
2.6 Sensor Pengikut Garis ... 19
2.6.1 Photodioda ... 19
2.7 Katup pneumatic (Valve) ... 20
2.7.1 Valve ... 20
2.8 Air Cylinder ... 22
2.8.1 Cylinder Double Acting ... 22
2.9 Driver Motor... 23
2.9.1 EMS H-Bridge 30A ... 23
BAB III METODE PENELITIAN ... 25
3.1.Model Pengembangan ... 25
3.2. Prosedur Penelitian ... 25
3.3 Diagram Blok Sistem ... 27
3.4 Perancangan Mekanik Robot ... 28
xiii
3.4.4 ST-Link Downloader ... 32
3.4.5 Driver Motor ... 35
3.4.5.1 Konfigurasi Pin ... 35
3.4.6 RFID Starte Kit ID12 ... 38
3.4.7 Prosedur Testing ... 39
3.4.8 Optocoupler ... 40
3.4.9 Sensor photdioda ... 41
3.5 Perancangan Perangkat Lunak ... 42
3.5.1 Program Membaca Sensor rotary encoder. ... 47
3.5.2 Program Pembacaan RFID ... 49
3.5.3 Program pembacaan sensor photodioda ... 50
3.6 Metode Pengujian dan Evaluasi Sistem... 52
3.6.1 Pengujian dan Evaluasi Minimum Sistem ... 52
3.6.2 Pengujian dan Evaluasi Sensor Rotary Emcoder ... 52
3.6.3 Pengujian dan Evaluasi Motor DC ... 53
3.6.4 Pengujian dan Evaluasi Program Sensor photodioda ... 53
3.6.5 Pengujian RFID Reader ... 53
BAB IV PENGUJIAN SISTEM ... 54
4.1.Pengujian Minimum System ... 54
4.1.1. Tujuan ... 54
xiv
4.2.Pengujian Driver Motor ... 57
4.2.1 Tujuan ... 57
4.2.2 Alat yang Digunakan... 57
4.2.3 Prosedur Pengujian ... 57
4.2.4 Hasil Pengujian ... 58
4.3.Pengujian Sensor Rotary ... 59
4.3.1 Tujuan ... 59
4.3.2 Alat yang Digunakan... 59
4.3.3 Prosedur Pengujian ... 60
4.3.4 Hasil Pengujian ... 60
4.4.Pengujian RFID Reader ... 65
4.4.1 Tujuan ... 65
4.4.2 Alat yang Digunakan... 65
4.4.3 Prosedur Pengujian ... 65
4.4.4 Hasil Pengujian ... 66
4.5.Pengujian Sensor Photodioda ... 66
4.5.1 Tujuan ... 67
4.5.2 Alat yang Digunakan... 67
4.5.3 Prosedur Pengujian ... 67
4.5.4 Hasil Pengujian ... 67
4.6.Pengujian Keseluruhan Sistem Pada area simulasi parkir ... 68
xv
4.6.4 Hasil Pengujian ... 69
BAB V PENUTUP ... 72
5.1.Kesimpulan ... 72
5.2.Saran ... 72
DAFTAR PUSTAKA ... 74
LAMPIRAN ... 76
1 1.1 Latar Belakang
Adapun sebuah sistem parkir automatis untuk mengarahkan mobil ketempat parkir yang kosong dengan cara menggunakan teknologi WSN (Wireless Sensor Network) yang dimana model parkiran ini adalah model parkiran bertingkat, setiap parkirannya akan dideteksi menggunakan IR sensor (Sensor Infrared), jika terdeteksi semua parkiran penuh maka mobil akan diarahkan ke lantai berikutnya dengan menggunakan sebuah lift, nantinya mobil akan memasuki sebuah lift, kemudian lift itu akan membawa mobil tersebut ke lantai berikutnya yang dianggap sistem ada parkiran yang masih kosong dan semua itu dijalankan secara automatis (Aggarwal,2012).
Namun dengan sistem tersebut hanya bisa melayani sebuah parkiran bertingkat saja, jadi banyak parkir dipusat keramaian tidak bisa menggunakan sistem tersebut, karena pengelola harus merenovasi tempat parkir yang sudah ada dan membutuhkan biaya yang lumayan besar, apalagi selama masa renovasi parkiran tersebut tidak bisa dipakai, jadi otomatis aktifitas pusat keramaian akan lumpuh dan akan menyebabkan kerugian yang sangat banyak.
sering digunakan dalam sebuah industri untuk memindahkan bahan – bahan yang ada disekitar fasilitas manufaktur dan gudang (Sharma,2012).
1.2 Perumusan Masalah
Adapun permasalahan yang akan dihadapi oleh penulis ke depannya dalam proses pengerjaan Tugas Akhir ini adalah:
1. Bagaimana cara untuk menentukan tujuan tempat parkir yang kosong. 2. Bagaimana cara robot mengetahui titik tujuan parkiran yang akan
dituju.
1.3 Pembatasan Masalah
Dalam perancangan dan pembuatan alat ini, terdapat beberapa batasan masalah, antara lain :
1. Tidak bisa mendeteksi jenis mobil yang akan dibawa 2. Posisi awal mobil harus berada di kotak yang disediakan. 3. Pengambilan mobil akan diambil oleh robotnya.
4. Tidak bisa mendeteksi halangan yang ada didepan.
5. Sensor kapasitif diganti dengan sensor photodioda, karena outputnya sama - sama analog
6. Satu RFID card mewakili satu tempat tujuan. 7. Silinder oil diganti dengan silinder angin.
8. Robot membutuhkan lokasi yang pencahayaannya bagus 9. Robot membutuhkan lokasi yang pencahayaan bagus.
1.4 Tujuan
Adapun tujuan dari pembuatan simulasi robot ini yaitu:
1. Informasi tujuan didapat dari RFID reader yang di hubungkan dengan STM32F4 Arm Cortex-M4 dengan menggunakan komunikasi USART. 2. Sensor Photodioda digunakan untuk penandan jalur yang akan dilewati
robot dan titik tujuan dari robot.
1.5Sistematika Penulisan
Laporan Tugas Akhir ini ditulis dengan sistematika penulisan sebagai berikut:
1 BAB I : PENDAHULUAN
Bab ini membahas tentang latar belakang masalah, perumusan masalah, pembatasan masalah, tujuan penulisan laporan tugas akhir, dan sistematika penulisan tugas akhir.
2 BAB II : LANDASAN TEORI
3 BAB III : METODE PENELITIAN
Dalam bab ini dijelaskan tentang metode penelitian serta alasan penggunaan metode tersebut dalam penelitian. Pada bab ini dijelaskan pula tentang pembuatan perangkat keras (hardware) dengan menggabungkan perangkat lunak (software) sebagai pengontrol pada robot tersebut, serta penerapan metode penelitian pada robot ini.
4 BAB IV : PENGUJIAN DAN ANALISIS SISTEM
Bab ini berisi tentang pengujian secara keseluruhan. Pengujian yang dilakukan meliputi pengujian minimum system, pengujian motor driver, pengujian sensor ultrasonik, pengujian Inductive proximity sensor, pengujian fuzzy, pengujian keseluruhan sistem navigasi pada arena, pengujian keseluruhan sistem navigasi deteksi benda logam pada arena.
5 BAB V : PENUTUP
6
Teori-teori yang digunakan dalam perancangan perangkat keras dan perangkat lunak adalah studi dari keputusan berupa data-data literature dari masing-masing komponen, informasi dari internet serta konsep-konsep teori buku penunjang, antara lain:
2. Landasan Teori
2.1 AGV (Autometed Guide Vehicle)
Sebuah kendaraan Pemandu otomatis atau Automated Guided Vehicle (AGV) adalah robot mobile yang mengikuti tanda atau jalur di lantai, atau menggunakan penglihatan atau laser. Robot ini paling sering digunakan dalam aplikasi industri untuk memindahkan bahan di sekitar fasilitas manufaktur atau gudang. Penerapan kendaraan pemandu otomatis telah diperluas selama akhir abad ke-20 dan mereka tidak lagi terbatas pada lingkungan industri. Sistem kendaraan dipandu otomatis (AGVs) banyak digunakan untuk bahan mengangkut di bidang manufaktur dan pergudangan. Sistem ini menawarkan banyak keuntungan dibandingkan bentuk lain dari transportasi material. Namun, desain dari sistem ini adalah karena kompleks dengan keputusan yang saling terkait yang harus dibuat dan sebagian besar desain alternatif sistem yang tersedia. Secara khusus, desain sistem kontrol AGVs bisa sangat menantang, dan itu bisa secara dramatis mempengaruhi biaya dan kinerja sistem.
untuk routing produk melalui pengolahan individu stasiun dan berinteraksi dengan peralatan dan operator mempengaruhi atas produksi. Peran AGVs adalah untuk memfasilitasi pengangkutan bagian, peralatan, perlengkapan, dan lain - lain, antara pusat pengolahan individu sebagaimana ditentukan oleh sistem kontrol pada lantai (Sharma,2012). Seperti pada gambar 2.1
Gambar 2.1. AGV (Automated Guide Vehicle) (Sharma,2012)
2.2 Mecanum wheel Robot 2.2.1 Mecanum-directional Robot
Gambar 2.2. Mecanum wheel
untuk menentukan arah pergerakan robot maka perlu melakukan pemrograman robot kemudian menset putaran roda pada robot tersebut, misalkan untuk bergeser ke arah kiri atau kanan maka perlu perbedaan arah putaran motor baik bagian depan atau bagian belakang, gambar arah pergerakan Mecanum wheel dapat diperhatikan pada gambar 2.2.2 berikut :
2.3 ARM CortexM4 (STM32F4 DISCOVERY) 2.3.1 Pengertian ARM CortexM4
Arsitektur ARM merupakan arsitektur processor 32-bit RISC yang dikembangkan oleh ARM Limited.Dikenal sebagai Advanced RISC Machine dimana sebelumnya dikenal sebagai Acorn RISC Machine. Pada awalnya merupakan prosesor desktop yang sekarang didominasi oleh keluarga x86. Namun desain yang sederhana membuat prosesor ARM cocok untuk aplikasi berdaya rendah. Hal ini membuat prosesor ARM mendominasi pasar mobile electronic dan embedded system dimana membutuhkan daya dan harga yang rendah. Pada tahun 2007, sekitar 98% dari satu miliar mobile phone yang terjual menggunakan setidaknya satu buah prosesor ARM. Dan pada tahun 2009, prosesor ARM mendominasi sekitar 90% dari keseluruhan pasar prosesor 32-bit RISC. Prosesor ARM digunakan di berbagai bidang seperti elektronik umum, termasuk PDA, mobile phone, media player, music player, game console genggam, kalkulator dan seperti hard disk drive dan router.
ARM Cortex-M yang mumpuni. Di dalamnya sudah dilengkapi dengan ST-LINK/V2 untuk programming dan debugging melalui koneksi USB.STM32 Discovery Board juga dapat digunakan untuk membangun aplikasi dengan tingkat kompleksitas algoritma yang cukup tinggi, karena dicatu prosesor kelas 32-bit berkinerja tinggi dapat diperhatikan pada Gambar 2.3.1 Berikut:
Gambar 2.3. STM32 Discovery Board
2.3.2 Arsitektur STM32F4 Discovery
- Saluran I/O sebanyak 80 buah, yaitu GPIO A, GPIO B, GPIO C, GPIO D, dan GPIO E.
- ARM 32-bit Cortex-M4 CPU with FPU.
- Adaptive real-time accelerator (ART Accelerator).
- 168 MHz maximum frequency, 210 DMIPS/1.25 DMIPS/MHz. - features 1024 Kbytes of Flash.
- 196 Kbytes of SRAM.
- 3 - 12-bit, 0.41 us A/D converters up to 24 channels, 2 - 12-bit D/A converters.
- 16-stream DMA controller with centralized FIFOs and burst support. - up to 12 – 16-bit and 2 – 32-bit timers up to 150 MHz.
- Up to 136 fast I/Os up to 84 MHz, Up to 138 5 V-tolerant I/Os.
- Up to 3 I2C interfaces, Up to 4 USARTs/2 UARTs (10.5 Mbit/s, ISO 7816, LIN, IrDA, modem control), Up to 3 SPIs (37.5 Mbits/s).
- 2 C_CAN interfaces (2.0B Active), SDIO interface.
- USB 2.0 FS device/host/OTG controller with on-chip PHY, USB 2.0 HS/FS device/host/OTG controller with dedicated DMA,on-chip FS PHY and ULPI.
- Hardware acceleration for AES 128, 192, 256, Triple DES, HASH (MD5, SHA-1).
- Analog true random number generator, CRC calculation unit, 96-bit unique ID.
- RTC: subsecond accuracy, hardware calendar.
2.4 Rotary Encoder
2.4.1 Rotary Encoder Omron E6A-2C
Untuk mendeteksi perpindahan atau putaran motor digunakan sensor rotary encoder. Yang menjadi pilihan adalah Incremental Encoder.Rotary Encoder Relatif (sering disebut juga Incremental Encoder) digunakan ketika metode pengkodean absolut tidak bisa digunakan (disebabkan ukuran dan bentuk piringan / cakram).Metode ini juga menggunakan piringan yang dipasang pada poros, tetapi ukuran piringan / cakram kecil, dengan jumlah garis radial yang banyak, seperti jeruji roda. Sebuah saklar optik, seperti photodiode, menghasilkan pulsa listrik. Kemudian rangkaian kontrol elektronika menghitung pulsa untuk menerjemahkan sudut putar dari poros dapat diperhatikan pada Gambar 2.4.1 berikut.
2.5 RFID (Radio Frequency IDentification)
2.5.1 RFID
Teknologi Radio Frequency Identification (RFId) adalah sebuah pengembangan teknologi pengambilan data secara otomatik atau pengenalan atau identifikasi obyek (Kenzeller,1999). Selama ini sistem otomatik yang dikenal adalah sistem bar code. Sistem bar code mempunyai keterbatasan dalam penyimpanan data serta tidak dapat dilakukan program ulang atas data yang tersimpan di dalamnya. Namun pada teknologi RFId, proses mengambil atau mengidentifikasikan obyek atau data dilakukan secara contacless (tanpa kontak langsung). Berdasarkan survey yang dilakukan oleh Cap Gemini Ernst & Young (CGeY) pada Januari 2004 terdapat 1000 pelanggan RFId di Amerika Utara. Hasil survey menunjukkan 23% mengetahui teknologi RFId, 42% memahami dengan baik teknologi RFId, dan lainnya tidak mengetahui dan tidak mempunyai opini. Dari ketertarikan untuk membeli dan menerapkan RFId didapatkan 11% akan menerapkan dalam waktu 1 tahun, 21% dalam waktu 2 tahun, 33% dalam waktu 2-5 tahun, 11% lebih dari 5 tahun, 21% tidak mempertimbangkan dan 3% tidak akan pernah membeli.
Identifikasi obyek atau data pada teknologi RFId dilakukan dengan mencocokkan data yang tersimpan dalam memori tag/transponder dengan data yang dikirimkan oleh reader. RFID dibentuk oleh komponen utama tag (transponder), reader dan antenna. Tag dapat
diidentifikasi. Pada tag pasif sinyal dikirimkan oleh reader melalui gelombang elektromagnetik, kemudian tag akan merespon dan mengirimkan data/informasi di dalamnya (AIM Frequency Forums). Reader juga memiliki kemampuan untuk melakukan perubahan data pada tag selain membaca dan mengambil data informasi yang tersimpan dalam tag. Sedangkan antenna pada sistem RFId berpengaruh terhadap jarak jangkauan pembacaan atau identifikasi obyek. Dalam konteks permasalahan pada artikel ini, tag diletakkan pada bagian luar box produk sehingga setiap perpindahan produk dapat dimonitor melalui RFId. Apabila pengiriman produk dilakukan maka dengan mudah diketahui produk mana yang dimuati terlebih dahulu sehingga dapat diterapkan FIFO produk dari kiriman sinyal kode pada tag. Sinyal yang dikirim transponder akan dibaca RFId dan dicocokkan dengan data yang tersimpan dalam media rekam yakni harddisk yang terinstal pada komputer.
. Gambar 2.5 RFID (Tarigan 2004)
2.5.2 RFID Reader ID-12
ID2, ID12 dan ID20 mirip dengan ID0, ID10 dan ID15 MK (ii) perangkat seri, tetapi mereka memiliki pin tambahan yang memungkinkan Magnetic Output emulasi untuk dimasukkan dalam fungsi tersebut. ID-12 dan ID-20 datang dengan antena internal, dan telah membaca rentang 12 + cm dan 16+ cm, masing-masing. Dengan antena eksternal, ID-2 memberikan rentang membaca hingga 25 cm. Ketiga pembaca mendukung ASCII, Wiegand26 dan Magnetic format data ABA Track2.
Tabel 2.1. Operasional dan karakteristik fisik
Tabel 2.2 Deskripsi PIN dan format data output
KOMPONEN LIST R1 = 100R
R2 = 1K R3 = 1K
C1 = 100uF 16V C2 = 100uF 10V
Pager = 2.7-3.5KHz 100R D1 = 1N4001
U1 = LM7805
Q1 = UTC8050 (NPN) ID2 = ID Inovasi ID2
Harap Perhatikan ID2 memiliki kapasitor internal 1.5nF dan ini membuat total Kapasitas tala = 2.5nF 3.1Khz Pager Logika adalah berpusat untuk kebanyakan penyeranta dikisaran 2.7-3.5Khz
RFID Starter Kit merupakan suatu sarana pengembangan RFID berbasis reader tipe ID-12 yang telah dilengkapi dengan jalur komunikasi RS-232 serta indikator buzzer dan LED. Modul ini dapat digunakan dalam aplikasi mesin absensi RFID, RFID access controller, dan sebagai berikut.
Spesifikasi
1. Berbasis RFID reader ID-12 dengan frekuensi kerja 125 kHz untuk kartu berformat EM4001/sejenis dan memiliki jarak baca maksimal 12 cm. 2. Kompatibel dengan varian RFID reader lainnya, antara lain: ID-2, ID-10,
dan ID-20.
3. Mendukung varian RFID reader/writer, antara lain: ID-2RW, ID-12RW, dan ID-20RW.
4. Mendukung format data ASCII (UART TTL/RS-232), Wiegand26, maupun Magnetic ABA Track2 (Magnet Emulation).
5. Dilengkapi dengan buzzer sebagai indikator baca, serta LED sebagai indikator tulis.
Gambar 2.5.2 Modul RFID 2.6 Sensor Pengikut Garis
2.6.1 Photodioda
Photodioda adalah sebuah dioda semikonduktor yang berfungsi sebagai sensor cahaya. Photodioda memiliki hambatan yang sangat tinggi pada saat dibias mundur. Hambatan ini akan berkurang ketika photodioda disinari cahaya dengan panjang gelombang yang tepat. Sehingga photodioda dapat digunakan sebagai detektor cahaya dengan memonitoring arus yang mengalir melaluinya. Sensor ini digunakan sebagai reciver dari pantulan sinar dari sebuah led.
2.7 Katup Pneumatic (Valve)
2.7.1 Valve
Katup pneumatic adalah katup yang digerakkan oleh energy listrik, mempunyai kumparan sebagai penggeraknya yang berfungsi untuk mengaktifkan relay dan dapat diaktifkan menggunakan arus AC maupun DC. Katup pneumatic (valve) mempunyai lubang keluaran, lubang masukan, lubang jebakan udara (exhaust) dan lubang Inlet Main. Lubang Inlet Main, berfungsi sebagai terminal atau tempat udara masuk, lalu lubang keluaran (Outlet Port) dan lubang masukan (Inlet Port), berfungsi sebagai tempat tekanan angin keluar dan masuk yang dihubungkan denga peneumatic, sedangkan lubang jebakan udara (exhaust), berfungsi untuk mengeluarkan udara bertekanan yang terjebak saat plunger bergerak atau pindah posisi ketika katup pneumatic bekerja. Gambar 9 menunjukkan bentuk katup pneumatic (valve), sedangkan dalam Gambar 10 menunjukkan bagian-bagian katup pneumatic (valve).
Gambar 2.7.1 Datasheet Pneumatic Valve
1. Valve Body
2. Terminal masukan (Inlet Port) 3. Terminal keluaran (outlet Port) 4. Manual Plunger
5. Terminal slot power supplay tegangan 6. Kumparan (koil)
7. Spring 8. Plunger
9. Lubang jebakan udara (exhaust from Outlet Port) 10. Lubang Inlet Main
11. Lubang jebakan udara (axhaust from Inlet Port) 12. Lubang plunger untuk exhaust Outlet Port 13. lubang plunger untuk Inlet Main
14. lubang plunger untuk exhaust Inlet Port
tersebut akan berubah menjadi medan magnet sehingga menggerakkan plunger, pada bagian dalamnya ketika plunger berpindah posisi maka pada lubang keluaran dari valve akan keluar udara bertekanan yang berasal dari supplay. Pada umumnya valve mempunyai tegangan kerja 24 volt DC (Suwito, 2014).
2.8 Air Cylinder
2.8.1 Cylinder Double Acting
Silinder pneumatik atau sering juga disebut air cylinder, adalah peralatan mekanik yang memanfaatkan kekuatan dari udara bertekanan untuk menghasilkan gerakan maju mundur secara linier. Gaya dari udara bertekanan yang masuk menggerakkan piston dalam silinder sehingga piston rod atau yang biasa juga disebut stroke, akan ikut bergerak ke arah yang tekanan udaranya lebih rendah. Piston rod itulah yang dimanfaatkan dalam berbagai aplikasi. Bagian-bagian silinder double acting terlihat dalam Gambar 2.8.
Gambar 2.8. Air Cylinder
harus bebas dari kontaminasi. Silinder double acting adalah silinder pneumatik yang menggunakan tekanan udara untuk bergerak maju dan mundur (Croser, E., 2002). Berbeda dengan silinder single acting yang salah satu gerak maju atau mundurnya menggunakan pegas. Pada silinder double acting terdapat dua lubang tempat udara masuk, satu untuk maju dan satu untuk mundur. Panjang stroke yang digunakan bervariasi, tergantung dengan pemanfaatan silinder (Suwito, 2014). 2.9 Driver Motor
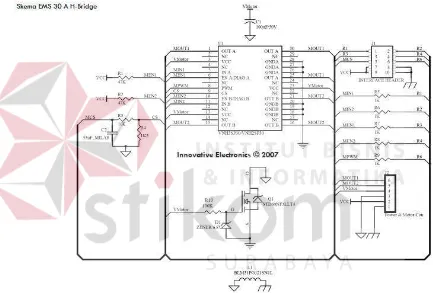
2.9.1 EMS H-Bridge 30A
Embedded Module Series (EMS) 30 A H-Bridge merupakan driver H-Bridge yang didisain untuk menghasilkan drive 2 arah dengan arus kontinyu sampai dengan 30 A pada tegangan 5,5 Volt sampai 16 Volt. Modul ini dilengkapi dengan rangkaian sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini mampu men-drive beban-beban induktif seperti misalnya relay, solenoida, motor DC, motor stepper, dan berbagai macam beban lainnya.
SPESIFIKASI
Terdiri dari 1 driver full H-Bridge beserta rangkaian current sense.
Mampu melewatkan arus kontinyu 30 A.
Range tegangan output untuk beban: 5,5 V sampai 16 V.
Input kompatibel dengan level tegangan TTL dan CMOS.
Jalur catu daya input (VCC) terpisah dari jalur catu daya untuk beban (VMot).
Output tri-state.
Frekuensi PWM sampai dengan 20 KHz.
Fault Detection.
Proteksi hubungan singkat.
Proteksi overtemperature.
Undervoltage dan Overvoltage Shutdown.
[image:30.595.99.532.255.548.2] Reverse Battery Protection.
25 3.1. Model Pengembangan
Tujuan dari tugas akhir ini yaitu akan membuat sebuah mobile robot yang mampu membantu manusia dalam memarkirkan kendaran pribadinya yaitu mobil. Robot ini mampu membawa mobil ketempat parkirann yang kosong hanya dengan menempelkan kartu RFID pada robot, ketika pemilik mobil menempelkan kartu RFID pada body robot yang sudah diberi RFID reader, robot akan mulai berjalan menghampiri mobil dan ketika mobil sudah ditemukan robot akan mengangkat mobil dan mengantarkan mobil ketempat parkir yang dituju dengan otomatis.
Pada robot ini terdapat sensor garis (Photodiaoda) dan sensor Rotary Encoder, disini sensor garis digunakan sebagai pembacaan jalur yang akan dilewati oleh robot agar robot berjalan pada lajur yang sudah disediakan dan sensor rotary encoder digunakan sebagai penanda titik tujuan dari robot.
3.2. Prosedur Penelitian
Prosedur penelitian yang dipakai dalam pengerjaan tugas akhir ini adalah: 1. Studi literatur
didapatkan dan perancangan perangkat lunak yaitu menggunakan CoIDE melalui pencarian dari internet, dan konsep-konsep teoritis dari buku-buku penunjang tersebut. Dari kedua bagian tersebut akan dipadukan agar dapat bekerja sama untuk menjalankan sistem dengan baik.
2. Tahap perancangan dan pengembangan sistem
Dalam membuat pengembangan sistem, terdapat beberapa langkah rancangan sistem yang diambil antara lain:
a. Membuat flowchart pada proses sistem secara keseluruhan b. Melakukan perancangan perangkat keras yang meliputi:
1. Merancang rangkaian elektronik yang digunakan pada penelitian ini 2. Melakukan percobaan tentang cara penggunaan sensor dan device yang
digunakan pada penelitian ini
3. Merancang mekanik untuk mobile robot
c. Melakukan perancangan perangkat lunak yang meliputi: 1. Mengatur protokol pengiriman antara PC dan STM32F4.
2. Membuat program USART pada STM32F4 agar bisa berkomunikasi denagn RFID Reader untuk pembacaan RFID card.
3. Membuat program pembacaan garis menggunakan sensor garis.
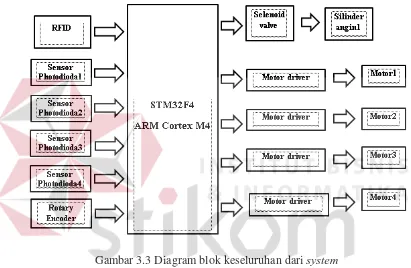
3.3. Diagram Blok Sistem
[image:33.595.95.506.239.507.2]Dari penelitian ini terdapat dua proses utama yang akan dijalankan, yaitu proses dimana robot dapat membawa mobil ke tempat parkir yang kosong sesuai inputan yang didapat dari menempelkan RFID card pada RFID reader yang berada dirobot Pada gambar 3.3 adalah diagram blok keseluruhan sistem ini.
Gambar 3.3 Diagram blok keseluruhan dari system
akan memberikan intruksi ke Selenoid Valve agar Silinder Angin mulai mengangkat mobil tersebut, Setelah mobil sudah terangkat motor akan kembali berjalan mengikuti garis dengan menggunakan sensor Phohodioda dan akan menuju posisi titik akhir yaitu tempat mobil itu diparkirkan dengan menggunakan sensor Rotary Encoder, setelah sampai dititik tujuan robot akan berhenti dan meletakkan mobil tersebut, setelah itu robot kembali keposisi awal.
3.4 Perancangan Mekanik Robot
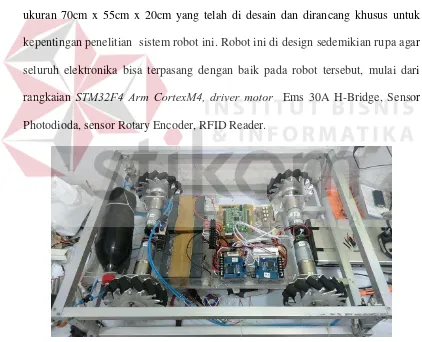
[image:34.595.90.512.298.640.2]Mekanik robot yang di gunakan adalah dari bahan aluminum persegi ukuran 70cm x 55cm x 20cm yang telah di desain dan dirancang khusus untuk kepentingan penelitian sistem robot ini. Robot ini di design sedemikian rupa agar seluruh elektronika bisa terpasang dengan baik pada robot tersebut, mulai dari rangkaian STM32F4 Arm CortexM4, driver motor Ems 30A H-Bridge, Sensor Photodioda, sensor Rotary Encoder, RFID Reader.
Gambar 3.4. Tampilan Keseluruhan Robot 3.4.1. Ukuran dimensi Mobile robot
Ukuran robot : 70 cm (panjang) x 55cm (lebar) x 20cm (tinggi) 3.4.2. Struktur Material Mobile robot
Bahan material yang digunakan dalam penelitian ini menggunakan beberapa bahan diantaranya sebagai berikut :
a. Bagian rangka 1. Alumunium 2. Mur dan baut 3. Akrilik
b. Bagian dari penggerak robot 1. Motor DC 24Volt
2. Roda Mecanum 3. Pneumatic valve 4. Pneumatic Cylinder
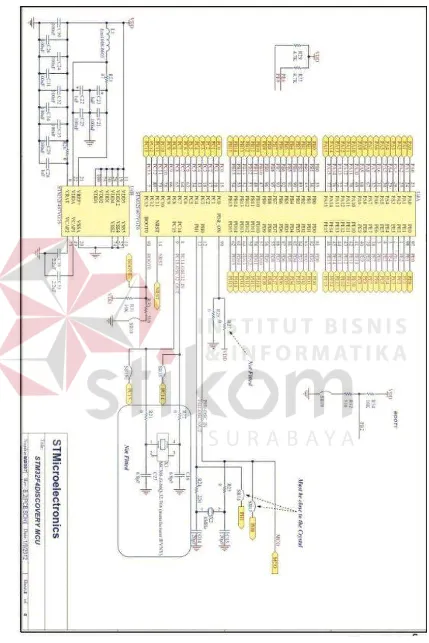
3.4.3 Perancangan Minimum System Microcontroller ARM Cortex M-4 (STM32F 4 DISCOVERY)
Rangkaian minimum system dibuat untuk mendukung kerja dari microchip STM32F407VTG dimana microchip tidak bisa berdiri sendiri alias harus ada rang akaian dan komponen pendukung seperti halnya rangakaian catu daya, kristal dan lain sebagaianya yang biasanya disebut minimum sistem Microchip berfungsi seb agai otak dalam mengolah semua instruksi baik input maupun output seperti halny a pemroses data inputan dari rotary encoder dan sensor photodiode kemudian me mproses data yang diterima dari RFID reader kemudian menjalankan perintah unt uk menjalankan motor.
Pada rangkaian minimum system ARM Cortex M-4 (STM32F4 DISCOV ERY) memberikan Pin VCC masukan tegangan operasi berkisar antara 2,8 Volt sa mpai dengan 3,2 Volt. Pin NRST berfungsi untuk masukan reset program secara o tomatis atau manual. Sedangkan pin MC0 digunakan untuk keperluan pemrogram an microcontroller ARM Cortex M-4 (STM32F4 DI ARM Cortex M-4 (STM32F4 DISCOVERY). Frekuensi kristal yang dipakai adalah 168 MHz maximum freque ncy, 210 DMIPS/1.25 DMIPS/MHz.
3.4.4 ST-Link Downloader
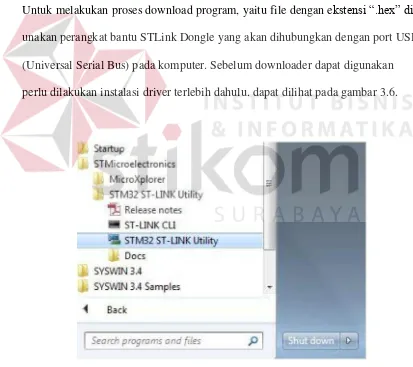
[image:38.595.91.504.303.670.2]Untuk melakukan proses download program, yaitu file dengan ekstensi “.hex” dig unakan perangkat bantu STLink Dongle yang akan dihubungkan dengan port USB (Universal Serial Bus) pada komputer. Sebelum downloader dapat digunakan perlu dilakukan instalasi driver terlebih dahulu. dapat dilihat pada gambar 3.6.
Gambar 3.6 ST-link UItility
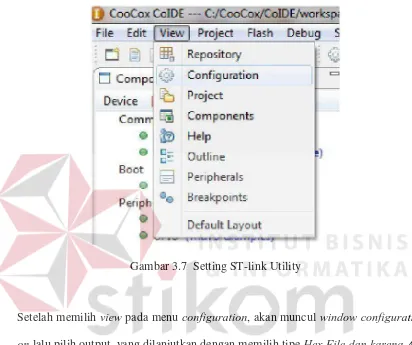
program ini. Pengaturan penggunaan downloader pada CooCox Ide dilakukan dengan memilih menu view, kemudian pilihan Configuration seperti yang ditunjukkan pada Gambar 3.7.
Gambar 3.7 Setting ST-link Utility
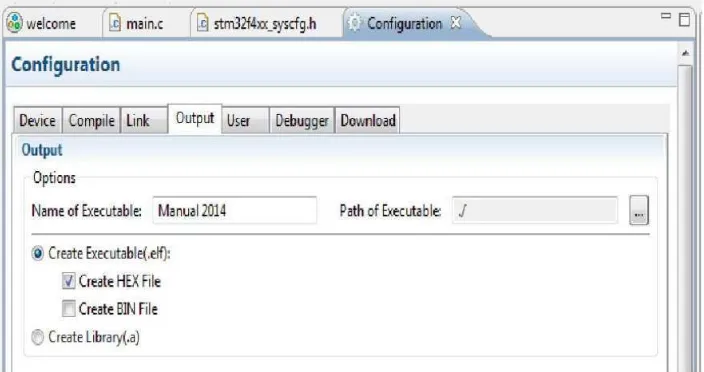
Gambar 3.8. Setting Configuration
Untuk mengetahui proses instalasi perangkat bantu ST-Link dongle dengan benar maka buka bagian device manager pada PC/Laptop dapat diperlihatkan pad a Gambar 3.9, Jika proses tersebut sudah terinstalasi dengan benar maka ARM Cor tex M-4 (STM32F4 DISCOVERY) sudah dapat digunakan menggunakan software STM32 ST-LINK Utility untuk mendownload file extensi “.hex” dapat diperlihatka n pada Gambar 3.10.
[image:40.595.92.502.300.684.2]Gambar 3.10. Running Aplikasi ST link Utility 3.4.5 Driver Motor DC 24V (EMS 30A H-Bridge)
Embedded Module Series (EMS) 30 A H-Bridge merupakan driver H-Bridge berbasis VNH3SP30 yang didesain untuk menghasilkan drive 2 arah dengan arus kontinyu sampai dengan 30 A pada tegangan 5,5 Volt sampai 36 Volt Modul ini dilengkapi dengan rangkaian sensor arus beban yang dapat digunakan sebagai umpan balik ke pengendali. Secara garis besar, fungsi modul pengendali motor ini adalah untuk mengendalikan arah dan kecepatan putaran motor DC sesuai instruksi kendali dari ARM Cortex M-4 (STM32F4 DISCOVERY).
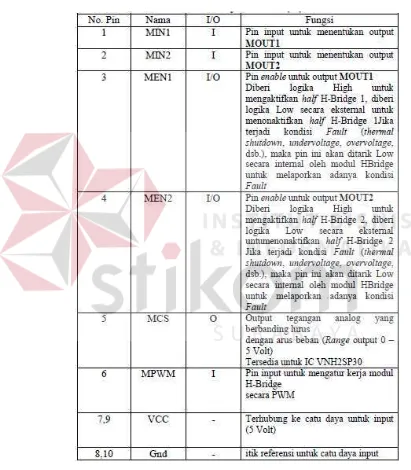
3.4.5.1. Konfigurasi Pin Modul EMS 30A H-Bridge
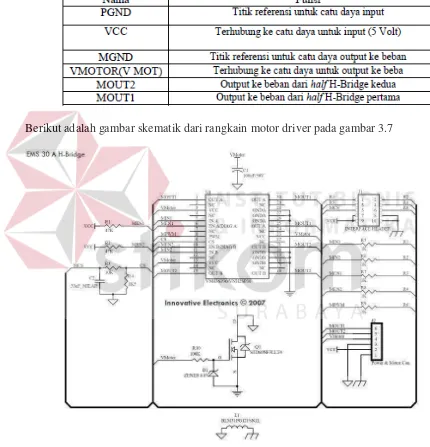
Berikut deskripsi dari masing-masing pin pada Interface Header dapat di perlihatkan pada table 3.1 untuk mengetahui layout IC VNH3SP30, konektor J1 dan J2 .
Power & Motor Con (J2) berfungsi sebagai konektor untuk catu daya dan beban. Berikut deskripsi dari masing-masing terminal pada Power & Motor Con dapat di perlihatkan pada table 3.2
Tabel 3.2 Datasheet port output EMS H-Bridge.
Berikut adalah gambar skematik dari rangkain motor driver pada gambar 3.7
3.4.6 RFID Starte Kit ID-12
RFID Starter Kit merupakan suatu sarana pengembangan RFID berbasis reader tipe ID-12 yang telah dilengkapi dengan jalur komunikasi RS-232 serta indikator buzzer dan LED. Modul ini dapat digunakan dalam aplikasi mesin absensi RFID, RFID access controller, dsb.
Spesifikasi
1. Berbasis RFID reader ID-12 dengan frekuensi kerja 125 kHz untuk kartu berformat EM4001/sejenis dan memiliki jarak baca maksimal 12 cm. 2. Kompatibel dengan varian RFID reader lainnya, antara lain: ID-2, ID-10,
dan ID-20.
3. Mendukung varian RFID reader/writer, antara lain: ID-2RW, ID-12RW, dan ID-20RW.
4. Mendukung format data ASCII (UART TTL/RS-232), Wiegand26, maupun Magnetic ABA Track2 (Magnet Emulation).
5. Dilengkapi dengan buzzer sebagai indikator baca, serta LED sebagai indikator tulis.
6. Tersedia jalur komunikasi serial UART RS-232 dengan konektor RJ11. 7. Tegangan input catu daya 9 - 12 VDC (J2).
[image:44.595.90.516.261.552.2]Gambar 3.12 Skematik RFID Reader 3.4.7. Prosedur Testing
Prosedur testing berikut akan menguji jalur komunikasi RS-232 dan RFID
reader ID-12 dalam mode ASCII.
Langkah-langkah testing:
1. Atur RFID Starter Kit agar RFID reader ID-12 bekerja pada mode
UART RS-232 (ASCII), yaitu jumper J3 & J4 pada posisi 2-3 dan
jumper J6 pada posisi 4.
2. Hubungkan RJ11 (J1) RFID Starter Kit ke COM port computer
menggunakan kabel serial.
3. Hubungkan catu daya 9 VDC ke terminal J2 RFID Starter Kit.
4. Jalankan program RFID1.exe, lalu pilihCOMport yang sesuai.
5. Nyalakan catu daya, lalu dekatkan RFID transponder ke RFID reader.
Gamabar 3.13. Datasheet mode jamper modul RFID 3.4.8. Optocoupler
sebenarnya hanyalah 3V. Berikut gambar rangkaian skematik optocopler pada gambar 3.11.
Gambar 3.14 Skematik Optocoupler 3.4.9 Sensor Photodioda
Gambar 3.15 Skematik Sensor Photodioda 3.5. Rancangan Perangkat Lunak
Gambar 3.16 Flowchart keseluruhan sistem
mengantarkan mobil sampai ditujuan, dan sensor rotary encoder digunakan sebagai membantu penanda pergerakan robot dan sensor photodiode sebagai penanda titik tujuan dari robot.
Disini robot akan mulai berjalan apabila RFID reader sudah membaca serial number dari RFID card, setelah sudah terbaca maka robot akan berjalan menuju lokasi yang akan dituju dan akan kembali lagi keposisi awal ketika tugas nya sudah terpenuhi.
Berikut potongan program dari sistem untuk satu tujuan dan untuk tujuan lainnya bisa mengukuti hanya tinngal menambahkan beberapa coding :
int main(void) { init_USART1(9600); DDRD(); PWM(); INT0(); INT1(); INT2(); INT3(); adc_configure(); lcd_init(16); lcd_gotoxy(0,0); lcd_puts("Bismillah"); delay_ms(1000); lcd_clear(); while(1) { sprintf(buff,"%s ",received_string); lcd_gotoxy(0,0); lcd_puts(buff);
if(Valid_Data(kartu1) > valid) {
lcd_gotoxy(0,1); lcd_puts("Kartu 1"); if(parkir1 == 0){
} else {
robot(angkat_no,1,Pos_Kanan_Satu,ambil,turunkan_yes, kanan); parkir1 = 0;
}
Kosongkan_Data(); }
else if(Valid_Data(kartu2) > valid) {
lcd_gotoxy(0,1); lcd_puts("Kartu 2"); if(parkir2 == 0){
robot(angkat_yes,1,Pos_Kiri_Satu,taruh,turunkan_no, kiri);
parkir2 = 1; }
else {
robot(angkat_no,1,Pos_Kiri_Satu,ambil,turunkan_yes, kiri);
parkir2 = 0; }
Kosongkan_Data(); }
else if(Valid_Data(kartu3) > valid) {
lcd_gotoxy(0,1); lcd_puts("Kartu 3"); if(parkir3 == 0){
robot(angkat_yes,1,Pos_Kanan_Dua,taruh,turunkan_no, kanan);
parkir3 = 1; }
else {
robot(angkat_no,1,Pos_Kanan_Dua,ambil,turunkan_yes, kanan); parkir3 = 0;
}
Kosongkan_Data(); }
else if(Valid_Data(kartu4) > valid) {
lcd_gotoxy(0,1); lcd_puts("Kartu 4"); if(parkir4 == 0){
robot(angkat_yes,1,Pos_Kiri_Dua,taruh,turunkan_no, kiri);
parkir4 = 1; }
robot(angkat_no,1,Pos_Kiri_Dua,ambil,turunkan_yes, kiri);
parkir4 = 0; }
Kosongkan_Data(); }
else if(Valid_Data(kartu5) > valid) {
lcd_gotoxy(0,1); lcd_puts("Kartu 5"); if(parkir5 == 0){
robot(angkat_yes,2,Pos_Kanan_Satu,taruh,turunkan_no, kanan); parkir5 = 1;
} else {
robot(angkat_no,2,Pos_Kanan_Satu,ambil,turunkan_yes, kanan); parkir5 = 0;
}
Kosongkan_Data(); }
else if(Valid_Data(kartu6) > valid) {
lcd_gotoxy(0,1); lcd_puts("Kartu 6"); if(parkir6 == 0){
robot(angkat_yes,2,Pos_Kiri_Satu,taruh,turunkan_no, kiri);
parkir6 = 1; }
else {
robot(angkat_no,2,Pos_Kiri_Satu,ambil,turunkan_yes, kiri);
parkir6 = 0; }
Kosongkan_Data(); }
else if(Valid_Data(kartu7) > valid) {
lcd_gotoxy(0,1); lcd_puts("Kartu 7"); if(parkir7 == 0){
robot(angkat_yes,2,Pos_Kanan_Dua,taruh,turunkan_no, kanan);
parkir7 = 1; }
else {
parkir7 = 0; }
Kosongkan_Data(); }
else if(Valid_Data(kartu8) > valid) {
lcd_gotoxy(0,1); lcd_puts("Kartu 8"); if(parkir8 == 0){
robot(angkat_yes,2,Pos_Kiri_Dua,taruh,turunkan_no, kiri);
parkir8 = 1; }
else {
robot(angkat_no,2,Pos_Kiri_Dua,ambil,turunkan_yes, kiri);
parkir8 = 0; } Kosongkan_Data(); } else { lcd_gotoxy(0,1); lcd_puts("waiting"); } } }
3.5.1 Program Membaca Sensor Rotary Encoder
Gambar 3.17. Flowchat Program Sensor Rotary
Pada flowchart di atas terlihat bagaimana cara untuk pembacaan sensor rotary encoder, dalam flowchart untuk pembacaan rotary encoder menggunakan mode interupt dan jika interrupt terbaca maka counter akan menambah satu per satu dan begitu seterusnya.
Berikut potongan program pembacaan Rotary Encoder: void EXTI0_IRQHandler(void)
{
a++;
EXTI_ClearITPendingBit(EXTI_Line0); EXTI_ClearFlag (EXTI_Line0);
}
void EXTI1_IRQHandler(void) {
x++; b++;
EXTI_ClearITPendingBit(EXTI_Line1); EXTI_ClearFlag (EXTI_Line1);
}
void EXTI2_IRQHandler(void) {
EXTI_ClearITPendingBit(EXTI_Line2); EXTI_ClearFlag (EXTI_Line2);
}
void EXTI3_IRQHandler(void) {
d++;
EXTI_ClearITPendingBit(EXTI_Line3); EXTI_ClearFlag (EXTI_Line3);
}
3.5.2 Program Pembacaan RFID
[image:55.595.92.505.297.570.2]Pada Pengujian pembacaan RFID dapat dilihat dalam flowchart berikut.
Gambar 3.18 Flowchart Pembacaan kartu RFID
diterima langsung di outputkan ke LCD agar dapat kita lihat data yang dikirimkan oleh modul RFID ke STM32F4 Berikut potongan program pembacaan RFID :
main() {
data_terima = USART_ReceiveData(USART3); lcd_gotoxy(9,1);
sprintf(b, "%c", data_terima); lcd_puts (b);
}
3.5.3 Program Pembacaan Sensor Photodioda
[image:56.595.94.505.296.724.2]Program pembacaan sensor photodioda menggunakan mode ADC (Analog Digital Converter), Kenapa menggunakan mode ADC karena data output dari sensor adalah data analog sedangkan minimum system STM32F4 hanya bisa menerima data digital, maka dari itu data perlu di convert menggunakan mode ADC.
Dari flowchart di atas bisa dilihat bagaimana cara pembacaan sensor photodioda menggunakan mode ADC agar minimum system bisa membaca data dari sensor phodioda karena data analog nya dirubah ke data digital, dalam flowchart tersebut ketika da inputan dari sensor data tersebut akan diolah oleh mode ADC terlebih dahulu dan lalu akan di inputkan ke lcd sebagai display. Berikut adalah potongan program dari pembacaan sensor.
int main() {
while(1) {
depan_kanan = read_adc(0); depan_kiri = read_adc(1); belakang_kanan = read_adc(2); belakang_kiri = read_adc(3); tengah_kanan = read_adc(4); tengah_kiri = read_adc(5); counter_kiri = read_adc(6); counter_kanan = read_adc(7);
delay_ms(100); lcd_clear();
sprintf(buff,"%d %d %d
%d",depan_kanan,depan_kiri,belakang_kanan,belakang_kiri);
lcd_gotoxy(0,0); lcd_puts(buff);
sprintf(buff,"%d %d %d
3.6 Metode Pengujian dan Evaluasi Sistem
Dalam pengujian sistem ini pengujian akan dilakukan pada perangkat keras serta perangkat lunak yang telah dibuat. Pengujian yang telah dilakukan dimulai dari pengujian minimum sistem, pengujian motor DC, pengujian sensor rotary encoder, pengujian sensor photodioda, serta pengujian pembacaan RFID reader.
3.6.1 Pengujian dan Evaluasi Minimum Sistem (STM32F4 Arm Cortex M4) Pengujian minimum sistem ini bertujuan untuk mengetahui apakah minimum sistem dalam robot dapat melakukan proses signature dan download program ke mikrokontroller dengan baik. Pengujian ini dilakukan dengan cara mengaktifkan power supply dan hubungkannya dengan minimum sistem. Sambungkan minimum sistem dengan komputer menggunakan kabel downloader lalu jalankan compiler ST-Link Utility pada komputer tersebut. Setelah itu lakukan proses download pada mikrokontroler, jika proses download berhasil maka akan ST-Link Utility akan mengeluarkan tampilan proses download.
3.6.2 Pengujian dan Evaluasi Sensor Rotary Encoder
3.6.3. Pengujian dan Evaluasi Motor DC
Pengujian motor DC ini bertujuan untuk mengetahui apakah motor DC bergerak atau berputar sesuai dengan yang diharapkan dan berputar dengan pwm tertentu sesuai dengan program yang telah di tentukan. Dalam hal ini pengujian dilakukan dengan memberikan tegangan pada driver motor DC dan melakukan koneksi antara driver motor DC dengan minimum sistem. Setelah itu proses dilanjutkan dengan menggunakan program untuk menggerakkan motor DC pada CoIDE yang di download pada STM32F4. Jika proses pengujian tersebut berhasil maka motor DC akan bergerak sesuai dengan yang diperintahkan dalam program yang terdapat pada mikrokontroler.
3.6.4 Pengujian dan Evaluasi Program Sensor Photodioda
Pengujian ini dilakukan untuk menguji apakah sensor dapat membedakan warna hitam dan putih, cara pengujian adalah output sensor akan dimasukan pada comparator dan kita tentukan threshold nya mengguna variable resistor setelah itu output dari komparator kita cek menggunakan avometer, dari situ kita bisa melihat data yang keluar 0V atau 5V ketika mengenai garis.
3.6. Pengujian RFID Reader
54
HASIL DAN PEMBAHASAN
Pengujian system yang telah dilakukan penulis ini merupakan pengujian terhadap perangkat keras serta perangkat lunak dari system secara keseluruhan yang telah selesai dibuat untuk mengetahui komponen-komponen dari sistem tersebut apakah sistem tersebut berjalan dengan baik.
4.1. Pengujian Minimum System 4.1.1. Tujuan
Pengujian minimum system bertujuan untuk mengetahui apakah minimum system dapat melakukan proses connect dan download program ke microcontroller dengan baik.
4.1.2. Alat yang Digunakan
Peralatan yang dibutuhkan untuk pengujian ini adalah sebagai berikut:
1. Rangkaian minimum system microcontroller ARM Cortex M-4 (STM32F4 Discovery)
2. Kabel Downloader. 3. PC atau Laptop. 4. Program CoIDE.
5. Power supply 1000mA - 5V. 4.1.3. Prosedur Pengujian
1. Aktifkan power supply dan hubungkan power supply tersebut dengan minimum system.
2. Sambungkan minimum system dengan kabel port USB (Universal Seial Bus). 3. Selanjutnya aktifkan PC dan jalankan program CoIDE dan ST-Link Utility. 4. Selanjutnya download program yang telah dibuat kedalam minimum system,
maka yang dilakukan adalah menjalankan program CoIDE lalu compile program yang akan di download hingga menghasilkan file ekstensi ”.hex”. 5. Setelah menghasilkan file ekstensi ”.hex” pada program CoIDE lali jalankan
program ST-Link Utility setelah itu koneksikan microcontroller ARM Cortex M-4 (STM32F4 discovery) lalu browse file ekstensi ”.hex” lalu start maka file ekstensi ”.hex” berhasil di download.
4.1.4. Hasil Pengujian
Hasil compile filoe extensi “.hex” dan men-download pada microcontroller ARM Cortex M-4 (STM32F4 Discovery) dapat dilihat pada gambar 4.1
Gambar 4.1 Tampilan hasil compiler file elstensi “.hex”
Pada gambar 4.1.1 menunjukkan bahwa minimum system telah berhasil men-download program ke microcontroller ARM Cortex M-4 (STM32F4 Discovery) sehingga program telah berhasil dijalankan
4.2. Pengujian Driver Motor
Driver motor digunakan sebagai perantara antara mikrokontroler dengan motor DC agar mikrokontroler dapat mengatur pergerakan dari motor DC dan juga kecepatan yang diinginkan. Dalam pengujian ini mikrokontroler akan diberikan program yang mengatur pergerakan dari motor DC.
4.2.1. Tujuan
Pengujian ini bertujuan untuk melihat apakah minimum system telah dapat mengatur pergerakan dan kecepatan dari roda melalui input yang diberikan pada driver motor.
4.2.2. Alat yang Digunakan
1. Rangkaian minimum system STM32F4 Arm CortexM-4 . 2. USB Downloader.
3. PC atau Laptop. 4. CoIDE.
5. Power supply 1000mA - 24V. 6. Power supply 1000mA - 5V. 7. Driver motor.
8. Motor DC.
4.2.3. Prosedur Pengujian
4. Download program untuk mengatur pergerakan motor yang telah dibuat kedalam minimum system
5. Lihat pergerakan roda sesuai dengan inputan pada program 4.2.4. Hasil Pengujian
[image:64.595.94.519.272.755.2]Pengujian dengan pergerakan roda dengan inputan dari mikrokontroler dan driver motor sebagai device perantara dapat dilihat hasilnya pada tabel 4.1.
Tabel 4.1 Hasil pengujian pergerakan driver motor
No PORT INPUT GERAK MOTOR
Dir 1 1
M1 Dir 2 0
Dir 3 1
1 M2 Dir 4 0 Motor Maju
Dir 5 1
M3 Dir 6 0
Dir 7 1
M4 Dir 8 0
Dir 1 0
M1 Dir 2 1
Dir 3 0
2 M2 Dir 4 1 Motor Mundur
Dir 5 0
M3 Dir 6 1
Dir 7 0
M4 Dir 8 1
Dir 1 1
M1 Dir 2 0
Dir 3 0
3 M2 Dir 4 1 Belok Kanan
Dir 5 0
M3 Dir 6 1
Dir 7 1
M4 Dir 8 0
Dir 1 0
M1 Dir 2 1
Dir 3 1
4 M2 Dir 4 0 Belok Kiri
Dir 5 1
M3 Dir 6 0
M4 Dir 8 1
Dir 1 1
M1 Dir 2 1
Dir 3 1
5 M2 Dir 4 1
Dir 5 1 Motor Berhenti
M3 Dir 6 1
Dir 7 1
M4 Dir 8 1
4.3. Pengujian Sensor Rotary
Pengujian ini dilakukan dengan menghubungkan sensor Rotary pada STM32F4 melalui port A-0, port A-1, port A-2, port A-3, port A-4 . Lalu memberikan program pembacaan sensor Rotary dengan menggunakan mode interupt dan menampilkan hasilnya pada LCD ke dalam. Setelah itu melakukan pengukuran jarak tempuhnya.
4.3.1. Tujuan
Tujuan pengujian ini yaitu untuk mengetahui hasil pembacaan sensor ultrasonik ketika diberi halangan didepan dan mengukur jarak halangan terhadap robot.
4.3.2. Alat yang Digunakan
Peralatan yang dibutuhkan untuk pengujian ini adalah sebagai berikut:
1. Minimum sistem STM32F4 . 2. USB Downloader.
3. PC atau Laptop. 4. Software CoIDE.
6. Sensor Rotary .
4.3.3. Prosedur Pengujian
Langkah-langkah untuk melakukan pengujian sensor Rotary ini adalah sebagai berikut:
1. Aktifkan power supply dan hubungkan ke STM32F4. 2. Sambungkan STM32F4 dengan kabel downloader. 3. Selanjutnya aktifkan PC dan jalankan program CoIDE. 4. Download program pembacaan sensor ke STM32F4.
5. Amati hasil pembacaan pulse dari sensor Rotary dilayar LCD.
4.3.4. Hasil Pengujian
[image:66.595.96.520.247.746.2]Hasil pengujian sensor Rotari Encoder pada motor 1 dapat kita lihat dalam tabel berikut
Tabel 4.2. Pengujian Sensor Rotary pada Motor 1
No Jarak Dengan Sensor (cm) Jarak Sebenarnya (cm) Error (cm)
1 174,3 174 0,3
2 174 174 0
3 174 174 0
4 174,8 174 0,8
5 174,5 174 0,5
6 174,5 174 0,5
7 174 174 0
8 175 174 1
9 175 174 1
10 173 174 2
11 174 174 0
12 174,8 174 0,8
13 175 174 1
14 175 174 1
16 174 174 0
17 174,8 174 0,8
18 174,5 174 0,5
19 175 174 1
20 173 174 2
21 174 174 0
22 174,8 174 0,8
23 174 174 0
24 174 174 0
25 174,8 174 0,8
26 174,8 174 0,8
27 175 174 1
28 174,5 174 0,5
29 174 174 0
30 175 174 1
Rata – rata Error(cm) 0,58
Dari pengujian sensor rotary pada motor hasil pembacaan data error nya adalah rata – rata 0,58 cm, error disini terjadi karena motor memiliki lembam atau dilangsung behenti ketika diberi perintah untuk berhenti.
[image:67.595.103.517.83.393.2]Hasil pengujian sensor Rotari Encoder pada motor 2 dapat kita lihat dalam tabel berikut
Tabel 4.3 Pengujian Sensor Rotary pada Motor 2
No Jarak Dengan Sensor(cm) Jarak Sebenarnya(cm) Error(cm)
1 237,6 174 63,6
2 236 174 62
3 231,1 174 57,1
4 233,3 174 59,3
5 241,7 174 67,7
6 241,3 174 67,3
7 226,7 174 52,7
8 240,4 174 66,4
9 243,5 174 69,5
10 255,3 174 81,3
11 233,3 174 59,3
[image:67.595.96.520.88.747.2]13 231,1 174 57,1
14 241,3 174 67,3
15 226,7 174 52,7
16 237,6 174 63,6
17 237,6 174 63,6
18 231,1 174 57,1
19 233,3 174 59,3
20 226,7 174 52,7
21 237,6 174 63,6
22 233,3 174 59,3
23 241,7 174 67,7
24 231,1 174 57,1
25 226,7 174 52,7
26 240,4 174 66,4
27 233,3 174 59,3
28 241,7 174 67,7
29 231,1 174 57,1
30 226,7 174 52,7
Rata – rata Error(cm) 62
Dari hasil pengujian sensor rotary pada motor 2 memliki rata – rata error 62 cm, robot masih belum bisa bergerak lurus dikarenakan faktor mekanik atau kondisi motor yang kurang baik, hal ini juga bisa disebabkan penggunaan yang terlalu terforsir.
[image:68.595.96.515.81.514.2] [image:68.595.109.518.609.744.2]Hasil pengujian sensor Rotari Encoder pada motor 3 dapat kita lihat dalam tabel berikut
Tabel 4.4 Pengujian Sensor Rotary pada Motor 3
No Jarak Dengan Sensor(cm) Jarak Sebenarnya(cm) Error(cm)
1 251,2 174 77,2
2 259,4 174 85,4
3 249,5 174 75,5
4 254,1 174 80.1
5 261 174 87
6 259,2 174 85,2
8 260,3 174 86,3
9 258,1 174 84,1
10 255,3 174 81,3
11 251,2 174 77,2
12 259,4 174 85,4
13 249,5 174 75,5
14 259,2 174 85,2
15 247,5 174 73,5
16 255,3 174 81,3
17 251,2 174 77,2
18 261 174 87
19 261 174 87
20 255,3 174 81,3
21 251,2 174 77,2
22 259,4 174 85,4
23 249,5 174 75,5
24 260,3 174 86,3
25 258,1 174 84,1
26 255,3 174 81,3
27 255,3 174 81,3
28 251,2 174 77,2
29 249,5 174 75,5
30 260,3 174 86,3
Rata – rata Error (cm) 85,28
Dari hasil pengujian sensor rotary pada motor 3 memliki rata – rata error 85,28 cm, robot masih belum bisa bergerak lurus dikarenakan faktor mekanik atau kondisi motor yang kurang baik, hal ini juga bisa disebabkan penggunaan yang terlalu terforsir.
[image:69.595.98.517.81.491.2]Hasil pengujian sensor Rotari Encoder pada motor 4 dapat kita lihat dalam tabel berikut
Tabel 4.5 Pengujian Sensor Rotary pada Motor 4
No Jarak Dengan Sensor(cm) Jarak Sebenarnya(cm) Error(cm)
1 233,6 174 59,6
3 226,3 174 52,3
4 225,5 174 51,5
5 226,4 174 52,4
6 228,4 174 54,4
7 214,7 174 40,7
8 227,5 174 53,5
9 233,7 174 59,7
10 233 174 59
11 226,4 174 52,4
12 228,4 174 54,4
13 233,6 174 59,6
14 221 174 47
15 226,3 174 52,3
16 225,5 174 51,5
17 233 174 59
18 226,4 174 52,4
19 228,4 174 54,4
20 214,7 174 40,7
21 225,5 174 51,5
22 233 174 59
23 226,4 174 52,4
24 228,4 174 54,4
25 214,7 174 40,7
26 221 174 47
27 226,3 174 52,3
28 225,5 174 51,5
29 233 174 59
30 226,4 174 52,4
Rata – rata Error(cm) 53,86
Dari hasil pengujian sensor rotary pada motor 4 memliki rata – rata error 53,86 cm, robot masih belum bisa bergerak lurus dikarenakan faktor mekanik atau kondisi motor yang kurang baik, hal ini juga bisa disebabkan penggunaan yang terlalu terforsir.
juga bisa menjadi faktor yang membuat error pada beberapa sensor begitu besar. Faktor terbesar dari error pada pengujian sensor rotary adalah akibat respon motor satu dengan yang lain tidak sama, hal ini menyebabkan pembacaan sensor rotary terganggu, Dalam penelitian ini digunakan sensor rotary magnetic, sehingga karekteristik pembacaan sensor rotary mengikuti putaran dari poros motor.
4.4.Pengujian RFID Reader
Pengujian berikut adalah pengujian terhadap modul RFID Reader untuk pembacaan Chip RFID. Pada pengujian ini dilakukan dengan cara menempelkan kartu ke modul RFID.
4.4.1 Tujuan
Pengujian ini bertujuan untuk menguji apakah RFID Reader bisa berfungsi dengan baik dan dapat membaca Chip RFID yang sesuai dengan kebutuhan pada tugas akhir ini.
4.4.2. Alat yang Digunakan 1. Personal Computer(PC) 2. Kabel USB to Serial
3. Power supply 1000mA - 12V 4. Modul RFID Reader
4.4.3. Prosedur Pengujian
1. Aktifkan power supply dan hubungkan ke modul RFID Reader. 2. Sambungkan kabel RS232 ke kabel USB to Serial.
3. Selanjutnya aktifkan PC dan jalankan aplikasi RFID read 4. Tapping kartu RFID ke RFID Reader
4.4.4. Hasil Pengujian
[image:72.595.95.535.189.507.2]Pengujian Inductive Proximity Sensor pada mobile robot terhadap berapa kedalaman tanah untuk mendeteksi benda logam ini dapat dilihat hasilnya pada tabel 4.6.
Tabel 4.6 Hasil Pengujian RFID Reader
No Proses Data Asli
Hasil Pembacaa dengan aplikasi
1 Percobaan kartu1 2C006DE1F353 2C006DE1F353
2 Percobaan kartu 2 6F00865358E2 6F00865358E2
3 Percobaan kartu 3 111111111111 111111111111
4 Percobaan kartu 4 00000022B89A 00000022B89A
5 Percobaan kartu 5 E168F002750E E168F002750E
6 Percobaan kartu 6 E168F01B5436 E168F01B5436
7 Percobaan kartu 7 E168F0071F61 E168F0071F61
8 Percobaan kartu 8 E168F02AEBB8 E168F02AEBB8
Berdasarkan Tabel 4.7 dapat disimpulkan bahwa modul RFID bisa berfungsi dengan baik dan dapat membaca data dalam Chip RFID, data tersebut yang nantinya akan digunakan untuk mewakili tempat tujuan dari robot,
4.5. Pengujian Sensor Photodioda
Pengujian ini dilakukan untuk mengetahui pembacaan sensor photodiaoda apakah se
4.5.1. Tujuan
Tujuan pengujian ini yaitu untuk mengetahui hasil pembacaan range sensor Photodioda apakah sudah sesuai dengan range pembacaan waran hitam dan putih.
4.5.2. Alat yang Digunakan
Peralatan yang dibutuhkan untuk pengujian ini adalah sebagai berikut:
1. Rangkaian minimum system STM32F4 . 2. USB Downloader.
3. PC atau Laptop. 4. CoIDE.
5. Power supply 1000mA - 5V. 6. Sensor Photodioda .
7. Rangkaian Comparator 4.5.3. Prosedur Pengujian
Langkah-langkah untuk melakukan pengujian sensor photodioda adalah sebagai berikut:
1. Aktifkan power supply dan hubungkan minimum system. 2. Sambungkan minimum system dengan kabel usb downloader. 3. Selanjutnya aktifkan PC dan jalankan program CoIDE. 4. Download program yang telah dibuat.
5. Amati hasil pembacaan garis akan ditampikan dilayar LCD. 4.5.4. Hasil Pengujian
memberikan nilai 0 dan nilai 1 dengan baik. Hasil pembacaannya akan ditampilkan pada tabel 4.7.
Tabel 4.7 Hasil Pengujian photodiode
No Sensor Pembacaan warna
putih range 0 sampai 150
Pembecaan warna Hitam range 151
sampai 255
1 Sensor 1 0 1
2 Sensor 2 0 1
3 Sensor 3 0 1
4 Sensor 4 0 1
5 Sensor 5 0 1
6 Sensor 6 0 1
7 Sensor 7 0 1
8 Sensor 8 0 1
Dalam tabel diatas saya memberi batasan untuk pembacaan range dari sensor photodioda kapan dia bernilai 0 dan bernilai 1, saya menggunakan nilai 150 sebagai batas tengah dari pembacaan hitam atau putih/
4.6. Pengujian Keseluruhan Sistem pada area simulasi parkir
Pengujian keseluruhan sistem pada area simulasi parkir, beberapa tujuan harus dituju oleh robot dan beberapa jalur dan beberapa belokan harus robot lewati untuk berjalannya sistem dengan baik.
4.6.1 Tujuan
Pengujian ini bertujuan untuk menguji apakah mobile robot dapat menuju parkiran yang dituju dengan baik, sehingga sesui dengan keinginan dan kebutuhan pada tugas akhir ini.
3. CoIDE
4. Power supply 1000mA - 24V 5. Power supply 1000mA - 12V 6. Power supply 1000mA - 5V 7. Mobile Robot
8. Stopwatch
4.6.3. Prosedur Pengujian
1. Aktifkan power supply dan hubungkan minimum system, Motor, dan RFID Reader.
2. Sambungkan minimum system dengan kabel downloader. 3. Selanjutnya aktifkan PC dan jalankan program CoIDE. 4. Download seluruh program yang sudah jadi ke STM32F4
5. Amati hasil jalannya robot sampai ditujuan di arena simulasi parkir tersebut. 4.6.4. Hasil Pengujian
Gambar 4.3 Area Parkiran
Berikut adalah hasil percobaan dari keseluruhan dari sistem dapat dilihat pada tabel berikut.
Tabel 4.8 Pengujian Keseluruhan Sistem Percobaan
Ke -
Tujuan Perintah Keterangan berhasil /
Tidak berhasil
Waktu Tempuh
Terjadi Error Pada
1 Parkiran 1 Mengantar Behasil 01:10 -
2 Parkiran 1 Mengantar Berhasil 01:12 -
3 Parkiran 1 Mengambil Gagal 01:23 Per 3
4 Parkiran 1 Mengambil Berhasil 01:07 -
5 Parkiran 2 Mengantar Berhasil 01:11 -
6 Parkiran 2 Mengantar Gagal 01:21 Bel 1
7 Parkiran 2 Mengambil Berhasil 01:10 -
8 Parkiran 2 Mengambil Gagal 01:20 Per 3
9 Parkiran 3 Mengantar Gagal 01:23 Per 3
10 Parkiran 3 Mengantar Berhasil 01:16 -
11 Parkiran 3 Mengambil Behasil 01:12 -
12 Parkiran 3 Mengambil Gagal 01:22 Bel 1
13 Parkiran 4 Mengantar Berhasil 01:10 -
15 Parkiran 4 Mengambil Berhasil 01:07 -
16 Parkiran 4 Mengambil Gagal 01:25 Per 1
17 Parkiran 5 Mengantar Berhasil 02:12 -
18 Parkiran 5 Mengantar Berhasil 02:12 -
19 Parkiran 5 Mengambil Gagal 02:17 Per 4
20 Parkiran 5 Mengambil Berhasil 02:15 -
21 Parkiran 6 Mengantar Gagal 02:22 Bel 1
22 Parkiran 6 Mengantar Berhasil 02:15 -
23 Parkiran 6 Mengambil Behasil 02:13 -
24 Parkiran 6 Mengambil Gagal 02:18 Per 4
25 Parkiran 7 Mengantar Berhasil 02:16 -
26 Parkiran 7 Mengantar Gagal 02:26 Per 4
27 Parkiran 7 Mengambil Gagal 02:30 Per 4
28 Parkiran 7 Mengambil Berhasil 02:14 -
29 Parkiran 8 Mengantar Berhasil 02:18 -
30 Parkiran 8 Mengantar Gagal 02:35 Per 3
31 Parkiran 8 Mengambil Berhasil 02:16 -
32 Parkiran 8 Mengambil Gagal 02:31 Per 3
72 BAB V
PENUTUP
5.1. Kesimpulan
Berdasarkan dari hasil evaluasi dan pengujian yang sudah dilakukan dalam Sistem Parkir Robot Otomastis Menggunakan Agv sehingga dapat dibuat beberapa kesimpulan sebagai berikut:
1. Robot mampu menentukan tempat parkir yang dituju dengan menggunakan informasi yang didapat dari kartu RFID.
2. Robot mampu menuju titik tujuan dengan cara menggunakan sistem counter dari sensor photodioda.
3. Dari hasil pengujian keseluruhan sistem robot dapat berhasil mengeksekusi 18 kali dan gagal mengeksekusi 14 kali, kegagalan eksekusi robot yang masih sangat besar dikarenakan faktor respon motor yang tidak sama.
5.2. Saran
Agar pada penelitian selanjutnya sistem ini dapat dikembangkan lebih baik lagi, maka penulis memberikan saran sebagai berikut:
1. Untuk kedepannya sistem pengontrolan motor bisa menggunakan metode PID, metode fuzzy, gein scheduling, atau adaptif control agar robot bisa benar-benar berjalan dengan lurus.
3. Mobil Robot ini dapat dikembangkan dalam sisi pemetaan yang lebih baik lalu robot nya ditambah satu lagi dan kedua robot bisa saling berkomunikasi agar tidak terjadi tabrakan antar robot pada saat memarkirkan mobil.
74
DAFTAR PUSTAKA
Aggarwal, Mala. 2012. Comparative Implementation Of Automatic Car Parking System With Least Distance Parking Space In Wireless Sensor Network, International Journal Of Scientific And Research Publication IJSRP.
Ali, M. Yakut. 2010. Development Of Automated Guided Vehicles for Industrial Logistics Applications in Developing Countries Using Appropriate Technology, International Journal of Mechanical & Mechatronics Engineering
IJMME-IJENS
Ardilla, Fernando. 2011. Path Tracking Pada Mobile Robot Dengan Umpan Balik Odometry, Prodi Teknik Komputer Politeknik Elektronika Negeri Surabaya.
Datasheet STM32F4 DISCOVERY BOARD.
Sharma, Mudit. 2012. Control Classification of Automated Guided Vehicle Systems,
International Journal of Engineering and Advanced Technology (IJEAT). Suwito, Wahyu. 2014. Pengaturan Posisi Piston Silinder Peneumatic Pada Lengan Robot
KRAI, Teknik Elektro Universitas Brawijaya
Wahyuono, Toto Alfian. 2014, Kendali Robot Manual 4WD Mecanum Wheel Berbasis PID Dengan Menggunakan ARM – CORTEX M4, Program Studi/Jurusan Sistem Komputer STMIK STIKOM Surabaya