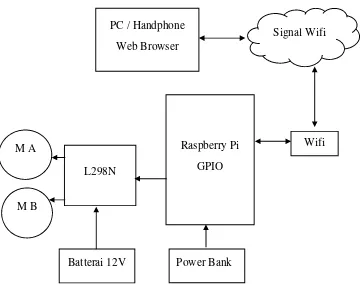
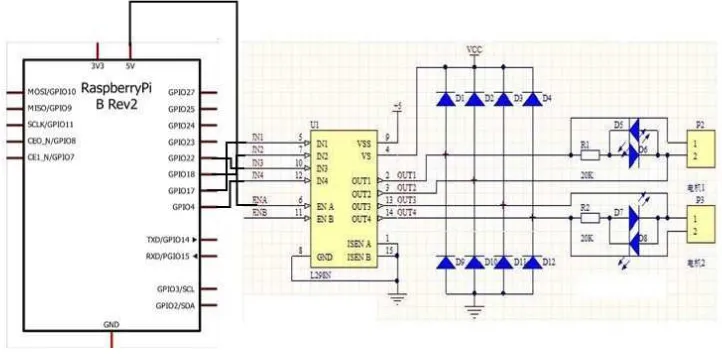
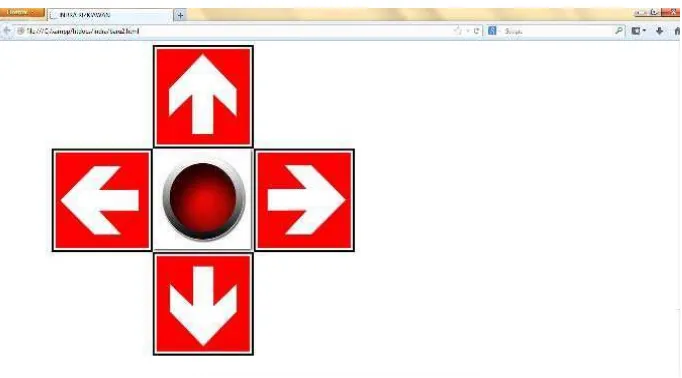
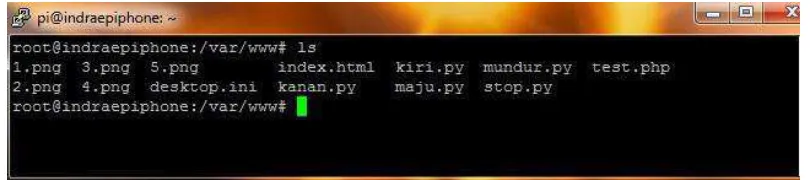
Rancang Bangun Robot Beroda Dengan Pengendali Jarak Jauh Berbasis Raspberry Pi
Teks penuh
Gambar

Dokumen terkait
Pada saat robot menerima perintah dari coach computer untuk mengirimkan data kondisi bola maka data ‘1’ akan dikirim jika bola telah terdeteksi oleh sensor bola pada robot dan
Pengujian pada user-guided control keep forward bertujuan untuk mengetahui keandalan robot servis saat diberikan perintah keep forward oleh pengguna, dimana robot
desain pengendalian pada two wheels inverted pendulum mobile robot atau robot beroda dua dengan pendulum terbalik dengan metode Pengendali Modus Luncur atau Sliding Mode Control
Percobaan-percobaan yang dilakukan untuk mengetahui performansi sistem navigasi indoor berbasis peta yang diimplementasikan pada robot beroda dengan platform Robot
Analisa Pengujian Robot Mengindari Halangan Pada Bagian Kiri dan Depan Dari tampilan pada hyperterminal, data yang didapat dan grafik yang dibuat berdasarkan data tersebut,
dalam dunia robotika dapat dilihat pada balancing mobile robot , yaitu mobile robot dengan dua roda yang roda tersebut diasumsikan sebagai kereta beroda dan badan
Pengujian pada user-guided control keep forward bertujuan untuk mengetahui keandalan robot servis saat diberikan perintah keep forward oleh pengguna, dimana robot servis
Api merupakan objek kedua sebagai pengendali interrupt perilaku robot pemadam api beroda, dalam penelitian ini dilakukan pengujian deteksi api dengan diberi
