KELEMBABAN PADA MEDIA CACING LUMBRICUS
RUBELLUS
TUGAS AKHIR
Diajukan sebagai salah satu syarat untuk menyelesaikan Program Sarjana
Komputer
Oleh :
Nama : Hery Setia Wardana
NIM : 11.41020.0002
Program : S1 (Strata Satu)
Jurusan : Sistem Komputer
FAKULTAS TEKNIK DAN INFORMATIKA
INSTITUT BISNIS DAN INFORMATIKA STIKOM
2.3 LM35 ... 14
2.4 LCD (Liquid Crystal Display) ... 15
2.5 Soil Moisture ... 18
2.6 Relay ... 19
2.6.1 Prinsip Kerja Relay ... 20
2.6.2 Jenis – Jenis Relay ... 23
2.6.3 Fungsi Relay ... 25
2.7 Motor Dc ... 26
2.8 Fan (Kipas) ... 27
2.9 Fuzzy Logic ... 30
2.9.1 Himpunan Fuzzy ... 33
2.9.2 Keanggotaan Fuzzy ... 33
2.9.3 Operator Dasar ... 33
2.9.4 Penalaran Monoton ... 34
2.9.5 Fungsi Implikasi ... 35
2.9.6 Metode Sugeno ... 35
2.10 hair Dryer ... 36
BAB III METODE PENELITIAN... 37
3.1 Perancangan perangkat keras ... 38
3.1.1 Rangkaian Microcontroller ... 38
3.1.2 Rangkaian LM35 ... 44
3.1.3 Rangkaian Relay Motor DC ... 45
3.1.4 Rangkaian Relay Kipas ... 46
3.1.6 Rangkaian Relay Fasher ... 48
3.2 Peletakan Komponen Elektronika ... 48
3.3 Perancangan Perangkat Lunak ... 54
3.3.1 Program Membaca suhu dan kelembaban ... 55
3.3.2 Fuzzy ... 56
BAB IV PENGUJIAN SISTEM ... 61
4.1 Pengujian Minimum System ... 61
4.1.1 Tujuan ... 61
4.1.2 Alat Yang Digunakan ... 61
4.1.3 Prosedur Pengujian ... 61
4.1.4 Hasil Pengujian ... 62
4.2 Pengujian Sensor LM35 ... 63
4.2.1 Tujuan ... 63
4.2.2 Alat Yang Digunakan ... 64
4.2.3 Prosedur Pengujian ... 64
4.2.4 Hasil Pengujian ... 64
4.3 Pengujian Sensor soil moisture ... 67
4.3.1 Tujuan ... 67
4.3.2 Alat Yang Digunakan ... 67
4.3.3 Prosedur Pengujian ... 67
4.3.4 Hasil Pengujian ... 68
4.4 Pengujian Motor DC ... 70
4.4.1 Tujuan ... 70
4.4.3 Prosedur Pengujian ... 70
4.4.4 Hasil Pengujian ... 71
4.5 Pengujian Kipas ... 71
4.5.1 Tujuan ... 71
4.5.2 Alat Yang Digunakan ... 71
4.5.3 Prosedur Pengujian ... 72
4.5.4 Hasil Pengujian ... 72
4.6 Pengujian Hair dryer ... 72
4.6.1 Tujuan ... 72
4.6.2 Alat Yang Digunakan ... 72
4.6.3 Prosedur Pengujian ... 73
4.6.4 Hasil Pengujian ... 73
4.7 Pengujian Fasher ... 74
4.7.1 Tujuan ... 74
4.7.2 Alat Yang Digunakan ... 74
4.7.3 Prosedur Pengujian ... 74
4.7.4 Hasil Pengujian ... 75
4.8 Pengujian Sistem Fuzzy ... 75
4.8.1 Tujuan ... 75
4.8.2 Alat Yang Digunakan ... 75
4.8.3 Prosedur Pengujian ... 76
4.8.4 Hasil Pengujian ... 76
4.9 Pengujian Sistem Fuzzy ... 77
4.9.2 Alat Yang Digunakan ... 77
4.9.3 Prosedur Pengujian ... 77
4.9.4 Hasil Pengujian ... 78
BAB V PENUTUP ... 84
5.1 Kesimpulan ... 84
5.2 Saran ... 85
DAFTAR PUSTAKA ... 86
1
PENDAHULUAN
1.1 Latar Belakang
Lumbricus rubellus, atau “Cacing Tanah Merah”, berkisar dari 1 sampai 4
inchi (25-105mm) panjang dan memiliki warna kemerahan, semi-transparan,
fleksibel kulit halus melingkar tersegmentasi menjadi beberapa bagian. Setiap
segmen berisi empat pasang bulu yang melekat pada parapodia, yang membantu
polychaetaI melekat pada substrat dan membatu bergerak, dan jumlah segmen per organisme berkisar 95-105 (Edwards dan Lofty 1972).
Pada saat ini pembudidaya cacing menentukan suhu dan kelembaban
berdasarkan perkiraan. Padahal, menurut para ahli Suhu dan kelembaban sangat
dibutuhkan oleh cacing lumbricus rubellus untuk aktivitas metabolisme seperti pertumbuhan respirasi dan reproduksi (Minnich 1997). Suhu yang dibutuhkan oleh
cacing jenis lumbricus rubellus ini sekitar 15-31oC (Radian, 1994). Menurut Simandjuntak dan Waluyo (1982) mengatakan bahwa kelembaban optimum bagi
kelangsungan hidup cacing lumbricus rubellus berkisar 15-30%.
Pengaturan suhu dalam rancangan alat ini menggunakan LM35 sebagai
pengatur suhu, sedangkan untuk pengaturan kelembaban menggunakan soil moisture sebagai sensor kelembaban.
yang ditentukan. Hair dryer yang berfungsi untuk memanaskan ruangan saat suhu terlalu dingin serta motor untuk meratakan kelembaban saat proses penyiraman.
kipas, fasher, hair dreyer, dan motor dibutuhkan relay yang mana relay ini digunakan untuk menggerakkan keempat aktuator. Relay ini dikontrol oleh
microcontroller dimana outputan dari microcontroller ini memicu coil yang berada pada relay agar switch pada relay berubah dari normaliopen (NO)ke normaliclose
(NC).
Motor yang digunakan pada alat ini adalah motor DC yang membutuhkan
tegangan 12V dan arus 50A. Motor ini mendapatkan daya dari aki, keluaran dari
aki ini diatur oleh relay agar motor berjalan saat microcontroller memberikan tegangan 5V sebagai pemicu relay tersebut. Sedangkan untuk motor DC tersebut digunakan untuk memutar wadah yang berisi cacing pada saat proses penyiraman
agar saat proses penyiraman kelembaban pada media cacing tersebut menjadi
merata. Motor akan bergerak pada saat kondisi kelembaban dibawah 40 %. Motor
akan bergerak dan diikuti dengan pengaktifan fasher untuk menyiram atau membasahi media cacing. Tujuannya agar media pada cacing jenis rumbricus rubellus menjadi stabil dan sesuai dengan yang dibutuhkan untuk proses pertumbuhan.
Sistem kontrol sangat dibutuhkan untuk mengatur kelembaban dan suhu
pada media cacing (grajen). Grajen adalah hasil limbah pengerjajian kayu atau
serbuk kayu. agar didapatkankan tingkat suhu dan kelembaban normal sesuai
dengan kebutuhan cacing. Sistem kontrol yang dimaksud adalah suatu
“implementasi Metode Fuzzy Logic untuk pengukuran kelembaban dan suhu pada
1.2 Rumusan Masalah
1. Bagaimana cara untuk mendeteksi suhu dan kelembaban pada media
cacing.
2. Bagaimana cara untuk melakukan kalibrasi suhu dan kelembaban
pada media cacing.
3. Bagaimana mengoordinasi motor, fasher, hairdryer dan kipas dengan menggunakan metode fuzzy agar mempertahankkan suhu dan
kelembaban pada rentang nilai 15-31oC dan 15-30%.
1.3 Batasan Masalah
Dalam penelitian ini terdapat batasan masalah yang diantaranya:
1. Hanya digunakan pada media cacing lumbricusrubellus. 2. Menggunakan grajen atau serbuk kayu sebagai media.
1.4Tujuan Penelitian
1. Merancang dan membuat sistem yang dapat digunakan untuk
mengukur suhu dan kelembaban yang relatif dengan media cacing.
2. Mengintegrasikan data sensor dengan data acuan.
3. Untuk mempertahankan suhu dan kelembaban pada rentang 15-310C
dan 15-30% dengan cara menggunakan metode fuzzy.
1.5 Manfaat Penelitian
1. Dapat membantu meringankan kerja para pembudidaya cacing.
1.6Konstribusi
Pertumbuhan cacing lumbricus rubellus agar lebih baik dengan mengontrol suhu dan kelembaban pada medianya. Dalam mengontrol suhu dan kelembaban
pada media cacing tersebut dibutuhkan beberapa aktuator seperti kipas, fasher, hair dryer dan motor.
Penelitian ini berfokus pada suhu dan kelembaban pada media cacing jenis
lumbricus rubellus. Pengaturan suhu dan kelembaban pada penelitian ini menggunakan metode fuzzy. Pengujian suhu dan kelembaban menggunakan
metode fuzzy ini agar suhu dan kelembaban dapat sesuai dengan apa yang
dibutuhkan oleh cacing lumbricus rubellus agar cacing dapat bermetabolismne dengan baik. Tetapi penelitian ini masih jauh dari sempurna untuk itu butuh
penyempurnaan kembali dari kekurangan-kekurangan yang ada.
1.7Sistematika Penulisan
Penulisan tugas akhir ini secara sistematis diatur dan disusun dalam lima
bab yang didalamnya terdapat beberapa sub bab. Secara singkat uraian materi dari
bab pertama hingga bab terakhir adalah sebagai berikut:
BAB I : Pendahuluan
Pada bab pendahuluan ini dibahas mengenai latar belakang masalah,
perumusan masalah, batasan masalah, tujuan, kontribusi serta sistematika dari
penulisan tugas akhir.
BAB II : Landasan Teori
Pada bab ini landasan teori ini dijelaskan tentang microcontroller ATMEGA32,
BAB III : Metode Penelitian
Pada bab ini dibahas mengenai perangkat keras (hardware) dan perangkat lunak (software). Hardware meliputi minimum system, motor DC 12V, Sensor LM35, dan Sensor Moistur Probe. Sedangkan untuk software yang digunakan untuk menunjang minimum system adalah bahasa C.
BAB IV : Pengujian Sistem
Pada bab ini dibahas tentang pengujian sistem baik hardware maupun
software. Pengujian hardware meliputi modul LM35, sensor moisture Proble, rangkaian minimum system ATMega32 dan dan Motor DC 12V, sedangkan untuk
software dilakukan secara keseluruhan.
BAB V : Penutup
Pada bab ini diberikan kesimpulan dari hasil pengujian sistem secara
keseluruhan dan saran-saran yang diharapkan dalam pengembangan lebih lanjut
6
LANDASAN TEORI
Teori-teori yang digunakan dalam perancangan perangkat keras dan
perangkat lunak adalah studi keputusan berupa data-data literatur dari
masing-masing komponen, informasi dari intenet dan konsep-konsep teori dari buku-buku
penunjang, antara lain :
2.1 Lumbricus Rubellus
Lumbricusrubellus adalah spesies cacing tanah yang berhubungan dengan Lumbricus terrestris. Biasanya cokelat kemerahan atau ungu kemerahan, bagian
punggung berwarna-warni, dan bagian perut berwarna kuning pucat. Mereka
biasanya mempunyai panjang sekitar 1 sampai 4 inci (25-105 mm), dengan sekitar
95-120 segmen.
2.1.1 Penampilan
Lumbricus rubellus, atau “Cacing Tanah Merah”, berkisar dari 1 sampai 4
inci (25-105mm) panjang dan memiliki warna kemerahan, semi-transparan,
fleksibel kulit halus melingkar tersegmentasi menjadi beberapa bagian. Setiap
segmen berisi empat pasang setae, atau bulu, dan jumlah segmen per organisme
jatuh tempo berkisar 95-105 (Edwards dan Lofty 1972). Segmentasi Lumbricus
rubellus mengidentifikasi organisme sebagai anggota Filum Annelida, sedangkan
diperbesar segmen anterior terhadap organisme yang disebut clitellum keanggotaan
menunjukkan untuk Kelas Clitellata. Anggota kelas ini juga didefinisikan dengan
2.1.2 Habitat
Lumbricusrubellus alami tinggal di tanah di bagian atas pada bahan organik (Edwards dan Lofty 1972). Lumbricus rubellus memerlukan tanah yang lembab dan
cukup untuk pertukaran gas (Wallwork 1983). Persyaratan lebih lanjut termasuk
faktor abiotik seperti pH dan suhu.
Berbagai faktor abiotik yang signifikan untuk Lumbricus rubellus,
Reynolds mencatat bahwa pH yang dapat diterima dengan preferensi netral
berkisar antara 5,5-8,7. Edwards dan Lofty mencatat bahwa temperatur juga
signifikan, dengan implikasi untuk pertumbuhan, respirasi, metabolisme dan
reproduksi.
menurut para ahli Suhu dan kelembaban sangat dibutuhkan oleh cacing
lumbricus rubellus untuk aktivitas metabolisme seperti pertumbuhan respirasi dan reproduksi (Minnich 1997). Suhu yang dibutuhkan oleh cacing jenis lumbricus rubellus ini sekitar 15-31oC (Radian, 1994). Menurut Simandjuntak dan Waluyo (1982) mengatakan bahwa kelembaban optimum bagi kelangsungan hidup cacing
lumbricus rubellus berkisar 15-30%.
Sehubungan dengan intensitas cahaya, Edwards dan Lofty mencatat bahwa
sebagian besar spesies cacing tanah photonegative untuk sumber cahaya yang kuat
dan photopositive lemah sumber-sumber cahaya. Hal ini disebabkan oleh efek
cahaya yang kuat, seperti pengeringan dan kurangnya sumber makanan yang
ditemukan di atas tanah untuk cacing tanah (Edwards dan Lofty).
2.1.3 Perilaku
Organ Lumbricus rubellus yang terkait dengan makan berada di prostomium
kemoreseptor di sini adalah sensitif terhadap alkaloid, polifenol dan asam.
Tanggapan negatif disebabkan asam dan alkaloid (pada tingkat tertentu), sedangkan
sensitivitas polifenol mengidentifikasi sumber makanan yang berbeda (Edwards
dan Lofty 1972). juga dapat ditemukan di bagian lain tubuh organisme. Ini melayani
dan mengarahkan organisme ini dari bahaya seperti suhu atau variasi pH dan
kemampuan organisme untuk mendapatkan sumber makanan.
2.1.4 Ekosistem
Lumbricus rubellus adalah saprophage yang memakan bahan organik yang dalam keadaan tinggi dekomposisi (Wallwork 1983). Dalam ekosistem, seperti
cacing tanah Lumbricus rubellus meningkatkan laju transfer antar tingkat trofik dengan membuatnya lebih mudah bagi tanaman untuk serapan gizi. Dalam rantai
makanan, cacing tanah Lumbricus rubellus adalah konsumen utama yang berperan
mengubah energi disintesis oleh fotosintesis tanaman menjadi makanan bagi hewan
di tingkat trofik yang lebih tinggi (Wallwork 1983).
Satu interaksi biotik yang signifikan dari hasil Lumbricus rubellus, sehubungan dengan produksi vitamin B12 mikroorganisme seperti bakteri
(Wallwork 1983). Keberadaan cacing tanah seperti Lumbricus rubellus
meningkatkan konsentrasi vitamin B12 memproduksi mikroorganisme dan vitamin
B12 di dalam tanah. Hasilnya adalah hasil jelai meningkat dan peningkatan volume
bahan organik untuk cacing tanah. Dengan cara ini ada hubungan umpan balik
positif (simbiose mutualisme) antara mikroorganisme dan Lumbricus rubellus.
2.2 ATMEGA32
sebagai berikut.
1. Menggunakan arsitektur AVR RISC
a. 131 perintah dengan satu clock cycle
b. 32 x 8 register umum
2. Data dan program memori
a. 32 Kb In-System Programmable Flash
b. 2 Kb SRAM
c. 1 Kb In- System EEPROM 1. 8 Channel 10-bit ADC 2. Two Wire Interface
3. USART Serial Communication
4. Master/Slave SPI Serial Interface
5. On-Chip Oscillator
6. Watch-dog Timer
7. 32 Bi-directional I/O
8. Tegangan operasi 2,7 – 5,5 V
Arsitektur AVR ini menggabungkan perintah secara efektif dengan 32
register umum. Semua register tersebut langsung terhubung dengan Arithmetic Logic Unit (ALU) yang memungkinkan 2 register terpisah diproses dengan satu perintah tunggal dalam satu clock cycle. Hal ini menghasilkan kode yang efektif dan kecepatan prosesnya 10 kali lebih cepat dari pada mikrokontroler CISC biasa.
Gambar 2.1 Blok diagram AVR ATMega32
Sumber : atmel corporation
Konfigurasi pin Mikrokontroler AVR ATMega32
Berikut ini adalah konfigurasi pin Atmega 32
Gambar 2.2 Pin-pin ATMega32
(Sumber : Atmel Corporation)
Gambar 2.2 Blok diagram AVR ATMega32 Secara fungsional konfigurasi
pin ATMega32 adalah sebagai berikut:
a)VCC
b)GND (Ground)
b. Ground
c) Port A (PA7 – PA0)
Port A adalah 8-bit port I/O yang bersifat bi-directional dan setiap pin memilki
internal pull-up resistor. Output buffer port A dapat mengalirkan arus sebesar 20
mA. Ketika port A digunakan sebagai input dan di pull-up secara langsung, maka
port A akan mengeluarkan arus jika internal pull-up resistor diaktifkan. Pin-pin dari
port A memiliki fungsi khusus yaitu dapat berfungsi sebagai channel ADC (Analog
to Digital Converter) sebesar 10 bit. Fungsi-fungsi khusus pin-pin port A dapat
ditabelkan seperti yang tertera pada tabel 2.1.
Tabel 2.1 Fungsi khusus port A
(Sumber : Atmel Corporation)
d) Port B (PB7 – PB0)
Port B adalah 8-bit port I/O yang bersifat bi-directional dan setiap pin
mengandung internal pull-up resistor. Output buffer port B dapat mengalirkan arus
sebesar 20 mA. Ketika port B digunakan sebagai input dan di pull-down secara
external, port B akan mengalirkan arus jika internal pull-up resistor diaktifkan.
Pin-pin port B memiliki fungsi-fungsi khusus, diantaranya :
a. SCK port B, bit 7
Port Alternate Function
PA7 ADC7 (ADC input channel 7)
PA6 ADC6 (ADC input channel 6)
PA5 ADC5 (ADC input channel 5)
PA4 ADC4 (ADC input channel 4)
PA3 ADC3 (ADC input channel 3)
PA2 ADC2 (ADC input channel 2)
PA1 ADC1 (ADC input channel 1)
Input pin clock untuk up/downloading memory.
b. MISO port B, bit 6
Pin output data untuk uploading memory.
c. MOSI port B, bit 5
Pin input data untuk downloading memory.
Fungsi-fungsi khusus pin-pin port B dapat ditabelkan seperti pada tabel berikut ini:
Tabel 2.2 Fungsi khusus port B Port Alternate Function
PB7 SCK (SPI Bus Serial Clock)
PB6 MISO (SPI Bus Master Input/Slave Output) PB6 MOSI (SPI Bus Master Output/Slave Input) PB5 SS (SPI Slave Select Input)
PB3 AIN1 (Analog Comparator Negative Input)
OCO (Timer/Counter0 Output Compare Match Output)
PB2 AIN0 (Analog Comparator Positive Input) INT2 (External Interrupt 2 Input)
PB1 T1 (Timer/Counter1 External Counter Input)
PB0 T0 (Timer/Counter External Counter Input) XCK (USART External Clock Input/Output)
(Sumber : Atmel Corporation)
e) Port C (PC7 – PC0)
Port C adalah 8-bit port I/O yang berfungsi bi-directional dan setiap pin
memiliki internal pull-up resistor. Output buffer port C dapat mengalirkan arus
sebesar 20 mA. Ketika port C digunakan sebagai input dan di pull-down secara
langsung, maka port C akan mengeluarkan arus jika internal pull-up resistor
diaktifkan. Fungsi-fungsi khusus pin-pin port C dapat ditabelkan seperti yang
Tabel 2.3 Fungsi khusus port C Port Alternate Function
PC7 TOSC2 (Timer Oscillator Pin 2) PC6 TOSC1 (Timer Oscillator Pin 1)
PC6 TD1 (JTAG Test Data In)
PC5 TD0 (JTAG Test Data Out)
PC3 TMS (JTAG Test Mode Select)
PC2 TCK (JTAG Test Clock)
PC1 SDA (Two-wire Serial Bus Data Input/Output Line) PC0 SCL (Two-wire Serial Bus Clock Line)
(Sumber : Atmel Corporation)
f) Port D (PD7 – PD0)
Port D adalah 8-bit port I/O yang berfungsi bi-directional dan setiap pin
memiliki internal pull-up resistor. Output buffer port D dapat mengalirkan arus
sebesar 20 mA. Ketika port D digunakan sebagai input dan di pull-down secara
langsung, maka port D akan mengeluarkan arus jika internal pull-up resistor
diaktifkan. Fungsi-fungsi khusus pin-pin port D dapat ditabelkan seperti yang
tertera pada tabel dibawah ini.
Tabel 2.4 Fungsi khusus port D Port Alternate Function
PD7 OC2 (Timer / Counter2 Output Compare Match Output) PD6 ICP1 (Timer/Counter1 Input Capture Pin)
PD6 OCIB (Timer/Counter1 Output Compare B Match Output)
PD5 TD0 (JTAG Test Data Out)
PD3 INT1 (External Interrupt 1 Input) PD2 INT0 (External Interrupt 0 Input)
PD1 TXD (USART Output Pin)
PD0 RXD (USART Input Pin)
2.3 LM35
Sensor suhu LM35 adalah komponen elektronika yang memiliki fungsi
untuk mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan.
Sensor Suhu LM35 yang dipakai dalam penelitian ini berupa komponen elektronika
elektronika yang diproduksi oleh National Semiconductor. LM35 memiliki keakuratan tinggi dan kemudahan perancangan jika dibandingkan dengan sensor
suhu yang lain, LM35 juga mempunyai keluaran impedansi yang rendah dan
linieritas yang tinggi sehingga dapat dengan mudah dihubungkan dengan rangkaian
kendali khusus serta tidak memerlukan penyetelan lanjutan. Meskipun tegangan
sensor ini dapat mencapai 30 volt akan tetapi yang diberikan kesensor adalah
sebesar 5 volt, sehingga dapat digunakan dengan catu daya tunggal dengan
ketentuan bahwa LM35 hanya membutuhkan arus sebesar 60 μA hal ini berarti
LM35 mempunyai kemampuan menghasilkan panas (self-heating) dari sensor yang dapat menyebabkan kesalahan pembacaan yang rendah yaitu kurang dari 0,5 ºC
pada suhu 25 ºC .
Gambar 2.3 Bentuk Fisik LM35
(Sumber : Jurnal Teknologi, Volume 4 Nomor 2, Desember 2011, 153-159)
Gambar 2.3 LM35 tampak depan dan tampak bawah. 3 pin LM35
menujukan fungsi masing-masing pin diantaranya, pin 1 berfungsi sebagai sumber
tegangan kerja dari LM35, pin 2 atau tengah digunakan sebagai tegangan keluaran
atau Vout dengan jangkauan kerja dari 0 Volt sampai dengan 1,5 Volt dengan
Keluaran sensor ini akan naik sebesar 10 mV setiap derajad celcius sehingga diperoleh persamaan sebagai berikut :
VLM35 = Suhu* 10 mV. Secara prinsip sensor akan melakukan
penginderaan pada saat perubahan suhu setiap suhu 1 ºC akan menunjukan
tegangan sebesar 10 mV. Pada penempatannya LM35 dapat ditempelkan dengan
perekat atau dapat pula disemen pada permukaan akan tetapi suhunya akan sedikit
berkurang sekitar 0,01 ºC karena terserap pada suhu permukaan tersebut. Dengan
cara seperti ini diharapkan selisih antara suhu udara dan suhu permukaan dapat
dideteksi oleh sensor LM35 sama dengan suhu disekitarnya, jika suhu udara
disekitarnya jauh lebih tinggi atau jauh lebih rendah dari suhu permukaan, maka
LM35 berada pada suhu permukaan dan suhu udara disekitarnya.
2.4 LCD (Liquid Crystal Display)
Pada LCD, adalah sebuah peraga kristal cair. Prinsip kerja LCD adalah
mengatur cahaya yang ada, atau nyala LED. Dibandingkan dengan seven segment,
memang LCD lebih dianggap rumit oleh sebagian orang, akan tetapi ada pula orang
yang lebih suka memakai LCD karena pemakaian daya yang sangat rendah, selain
itu juga karena jumlah karakter yang ditampilkan semakin banyak.
LCD yang akan penulis gunakan dalam pembuatan Tugas Akhir adalah
LCD M1632 buatan Seiko Instrument Inc. Meskipun harganya termasuk dalam kategori mahal akan tetapi lebih praktis dalam segi pembuatan modul beserta
pembuatan programnya, selain itu juga karena mudah didapat. Berikut ini gambar
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
LCD 16 x 2
Gambar 2.4 Konfigurasi LCD
(Sumber : Seiko Instrument Inc)
Pada gambar 2.4 diperlihatkan konfigurasi penyemat LCD yang terdiri dari
16 penyemat yang masing-masing penyemat mempunyai fungsi yang
berbeda-beda. Berikut tabel 2.5 diperlihatkan fungsi-fungsi tersebut.
Tabel 2.5 Fungsi LCD M1632
Penyemat Simbol Logika Keterangan
1 Vss - Catu Daya 0 Volt (Ground)
(Sumber : seiko instrument inc.)
LCD M1632 mempunyai karakteristik sebagai berikut :
1. 16 karakter, dua baris tampilan kristal cair (LCD) dari matriks titik.
2. Duty Ratio : 1/16.
3. ROM pembangkit karakter untuk 192 tipe karakter (bentuk karakter
4. Mempunyai dua jenis RAM yaitu, RAM pembangkit karakter dan
RAM data tampilan.
5. RAM pembangkit karakter untuk 8 tipe karakter program tulis
dengan bentuk 5 x 7 matrik titik.
6. RAM data tampilan dengan bentuk 80 x 8 matrik titik (maksimum
80 karakter).
7. Mempunyai pembangkit clock internal.
8. Sumber tegangan tunggal +5 Volt.
9. Rangkaian otomatis reset saat daya dinyalakan.
10. Jangkauan suhu pengoperasian 0 sampai 50 derajat.
LCD M1632 terdiri dari dua bagian utama. Bagian pertama merupakan
panel LCD sebagai media penampil informasi dalam bentuk huruf atau angka dua
baris, masing-masing baris bisa menampung 16 huruf atau angka. Bagian kedua
merupakan sebuah sistem yang dibentuk dengan mikrokontroler yang ditempelkan
dibalik panel LCD, yang berfungsi mengatur tampilan informasi serta mengatur
komunikasi LCD M1632 dengan mikrokontroler. Gambar 2.5 diperlihatkan
diagram blok pengendali LCD.
Dari gambar 2.5 diatas dijelaskan bahwa data inputan pada LCD yang
berupa 8 bit data (D0-D7) diterima terlebih dahulu di dalam mikrokontroler dalam
LCD yang berguna untuk mengatur data inputan sebelum ditampilkan dalam LCD.
Selain itu juga dilengkapi dengan inputan E, R/W, dan RS yang digunakan sebagai
pengendali mikrokontroler. Pada proses pengiriman data R/W=1 dan proses
pengambilan data R/W=0.
Penyemat RS dipakai untuk membedakan jenis data yang dikirim, jika
RS=0 data yang dikirim adalah perintah untuk mengatur kerja modul LCD,
sedangkan jika RS=1data yang dikirim adalah kode ASCII yang ditampilkan. Demikian pula saat pengambilan data, jika RS=0 data yang diambil dari modul
merupakan data status yang mewakili aktivitas modul LCD, sedangkan saat RS=1
maka data yang diambil merupakan kode ASCII dari data yang ditampilkan.
2.5 Soil Moisture
Soil Moisture Sensor Module adalah suatu modul yang berfungsi untuk
mendeteksi tingkat kelembaban tanah dan juga dapat digunakan untuk menentukan
apakah ada kandungan air di tanah/ sekitar sensor. Cara penggunaan modul ini
cukup mudah, yakni dengan memasukkan sensor ke dalam tanah dan setting
potensiometer untuk mengatur sensitifitas dari sensor. Keluaran dari sensor akan
bernilai 1 / 0 ketika kelembaban tanah menjadi tinggi/ rendah yang dapat di treshold
dengan potensiometer.
Spesifikasi dari sensor ini adalah :
1. Comparator menggunakan LM393
2. Hanya menggunakan 2 plat kecil sebagai sensor
4. Digital output D0 dapat secara langsung dikoneksikan dengan MCU dengan
mudah
Gambar 2.6. Bentuk Fisik Soil Moisture
2.6 Relay
Dalam dunia elektronika, relay dikenal sebagai komponen yang dapat mengimplementasikan logika switching. Sebelum tahun 70an, relay merupakan
“otak” dari rangkaian pengendali. Baru setelah itu muncul PLC yang mulai
menggantikan posisi relay.
Relay yang paling sederhana ialah relay elektromekanis yang memberikan pergerakan mekanis saat mendapatkan energi listrik. Secara sederhana relay
elektromekanis ini didefinisikan sebagai berikut :
a) Alat yang menggunakan gaya elektromagnetik untuk menutup (atau
membuka) kontak saklar.
b) Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik.
Gambar 2.7 Relay
(Sumber : Kilian, Christopher T, Modern Control Technology, (West Publishing Co : 1996))
Secara umum, relay digunakan untuk memenuhi fungsi – fungsi berikut : a. Remote control : dapat menyalakan atau mematikan alat dari jarak jauh b. Penguatan daya : menguatkan arus atau tegangan, Contoh : starting relay
pada mesin mobil
c. Pengatur logika kontrol suatu sistem
2.6.1 Prinsip Kerja Relay
Relay terdiri dari coil dan contact. Perhatikan gambar 2.8, coil adalah gulungan kawat yang mendapat arus listrik, sedang contact adalah sejenis saklar yang pergerakannya tergantung dari ada tidaknya arus listrik di coil. Contact ada 2 jenis : Normally Open (kondisi awal sebelum diaktifkan open), dan Normally Closed (kondisi awal sebelum diaktifkan close).
Secara sederhana berikut ini prinsip kerja dari relay : ketika Coil mendapat energi listrik (energized), akan timbul gaya elektromagnet yang akan menarik
Gambar 2.8 Skema relay elektromekanik
(Sumber : Kilian, Christopher T, Modern Control Technology, (West Publishing Co : 1996))
Selain berfungsi sebagai komponen elektronik, relay juga mempunyai fungsi sebagai pengendali sistem. Sehingga relay mempunyai 2 macam simbol yang digunakan pada :
1. Rangkaian listrik (hardware) 2. Program (software)
Berikut ini simbol yang digunakan :
Gambar 2.9 Rangkaian dan simbol logika relay
Dalam data sheet, penjelasan untuk coil dan contact terpisah. Hal ini menyebabkan masing – masing mempunyai spesifikasi yang berbeda – beda juga.
Perhatikan tabel berikut.
Tabel 2.6 Contoh datasheet relay G2RS Omron
2.6.2 Jenis – jenis Relay
Seperti saklar, relay juga dibedakan berdasar pole dan throw yang dimilikinya. Berikut definisi pole dan throw:
• Pole : banyaknya contact yang dimiliki oleh relay
• Throw : banyaknya kondisi (state) yang mungkin dimiliki contact
Berikut ini penggolongan relay berdasar jumlah pole dan throw : 1. SPST (Single Pole Single Throw)
2. DPST (Double Pole Single Throw) 3. SPDT (Single Pole Double Throw) 4. DPDT (Double Pole Double Throw) 5. 3PDT (Three Pole Double Throw) 6. 4PDT (Four Pole Double Throw)
Berikut ini rangkaian dan simbol macam-macam relay tersebut.
Gambar 2.10 Relay jenis Single Pole Double Throw (SPDT)
Gambar 2.11 Relay dengan contact lebih dari satu
(Sumber : Kilian, Christopher T, Modern Control Technology, (West Publishing Co : 1996))
Timing relay adalah jenis relay yang khusus. Cara kerjanya ialah sebagai berikut : jika coil dari timing relay ON, maka beberapa detik kemudian, baru
contact relay akan ON atau OFF (sesuai jenis NO/NC contact). Simbol dari timing relay bisa dilihat pada gambar 2.12.
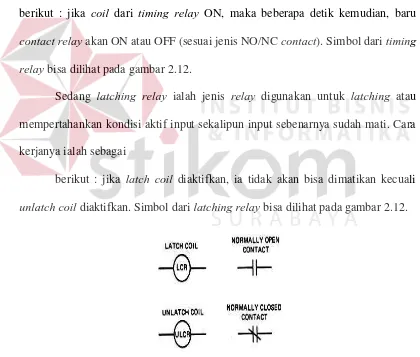
Sedang latching relay ialah jenis relay digunakan untuk latching atau mempertahankan kondisi aktif input sekalipun input sebenarnya sudah mati. Cara
kerjanya ialah sebagai
berikut : jika latch coil diaktifkan, ia tidak akan bisa dimatikan kecuali
unlatch coil diaktifkan. Simbol dari latching relay bisa dilihat pada gambar 2.12.
Gambar 2.12 Simbol coil dan contact dari timing relay
Gambar 2.13 Simbol coil dan contact dari latching relay
(Sumber : Rexford, Kenneth B, Electrical Control for Machines, (Delmar Publishers Inc : 1987))
2.6.3 Fungsi Relay
Salah satu kegunaan utama relay dalam dunia industri ialah untuk
implementasi logika kontrol dalam suatu sistem. Sebagai “bahasa pemrograman”
digunakan konfigurasi yang disebut ladder diagram atau relay ladder logic. Berikut ini beberapa petunjuk tentang relay ladder logic (ladder diagram):
a. Diagram wiring yang khusus digunakan sebagai bahasa pemrograman untuk rangkaian kontrol relay dan switching.
b. LD Tidak menunjukkan rangkaian hardware, tapi alur berpikir.
c. LD Bekerja berdasar aliran logika, bukan aliran tegangan/arus.
Relay Ladder Logic terbagi menjadi 3 komponen : 1. Input : pemberi informasi
2. Logic : pengambil keputusan
3. Output : usaha yang dilakukan
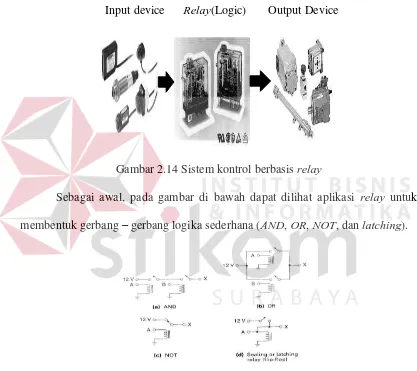
Dari gambar di atas nampak bahwa sistem kendali dengan relay ini mempunyai input device (misalnya: berbagai macam sensor, switch) dan output device (misalnya : motor, pompa, lampu). Dalam rangkaian logikanya, masing-masing input, output, dan semua komponen yang dipakai mengikuti standard
khusus yang unik dan telah ditetapkan secarainternasional.
Input device Relay(Logic) Output Device
Gambar 2.14 Sistem kontrol berbasis relay
Sebagai awal, pada gambar di bawah dapat dilihat aplikasi relay untuk membentuk gerbang – gerbang logika sederhana (AND, OR, NOT, dan latching).
Gambar 2.15 Relay untuk membentuk gerbang logika
(Sumber : Kilian, Christopher T, Modern Control Technology, (West Publishing Co : 1996))
2.7 Motor DC
awalnya diperkenalkan oleh Michael faraday lebih dari seabad yang lalu (E.
Pitowarno, 2006). Motor DC dikendalikan dengan menentukan arah dan kecepatan
putarnya. Arah putaran motor DC adalah searah dengan arah putaran jarum jam
(Clock Wise/CW) atau berlawanan arah dengan arah putaran jarum jam (Counter
Clock Wise/CCW), yang bergantung dari hubungan kutub yang diberikan pada
motor DC. Kecepatan putar motor DC diatur dengan besarnya arus yang diberikan.
Gambar 2.16 Sebuah motor DC
2.8 Fan (Kipas Pendingin) Dc
Fan dan blower banyak digunakan di industri kimia. Fan biasanya
digunakan untuk memindahkan sejumlah volume udara atau gas melalui suatu
saluran (duct). Selain itu, fan juga digunakan untuk memasok udara dalam proses pengeringan, pemindahan bahan tersuspensi di dalam aliran gas, pembuangan asap,
pengondensasian menara, pemasokan udara untuk pembakaran boiler, pembuangan
debu, aerasi sampah, pengeringan, pendinginan proses-proses industrial, sistem
ventilasi ruangan, dan aplikasi sistem beraliran tinggi dan bertekanan rendah yang
lain. Isu-isu yang berkaitan dengan kualitas udara di dalam ruangan dan
pengendalian pencemaran menyebabkan sebuah kebutuhan yang kontinyu terhadap
Pemilihan yang tepat terhadap ukuran dan tipe fan dan blower merupakan
hal yang sangat penting dalam kaitannya dengan sistem energi yang efisien. Dalam
bangunan yang besar, blower sering digunakan karena tekanan antarannya yang tinggi yang diperlukan untuk mengatasi turun tekan dalam sistem ventilasi.
Sebagian besar blower berbentuk sentrifugal. Blower juga dapat digunakan untuk memasok udara draft ke boiler dan tungku.
Fan biasanya digunakan untuk tekanan rendah. Tekanan yang dihasilkan
biasanya kurang dari 0.5 lb/in2 (3.45 kPa). Sebaliknya, blower digunakan pada
tekanan yang relatif lebih tinggi, namun biasanya lebih rendah dari 1.5 lb/in2 (10.32
kPa). Secara umum, fan dan blower dapat dikategorikan dalam dua bentuk, yaitu
aliran sentrifugal dan aliran aksial.
Fan adalah piranti yang menyebabkan aliran suatu fluida gas dengan cara
menciptakan sebuah beda tekan melalui pertukaran momentum dari bilah fan ke
partikel-partikel fluida gas. Impeller fan mengubah energi mekanik rotasional menjadi baik energi kinetik dan statik dalam fluida gas. Pembagian energi mekanik
menjadi energi kinetik dan statik yang diciptakan dan efisien energi bergantung
pada jenis bilah fan yang dirancang. Fluida yang dipindahkan oleh fan seringkali
adalah udara dan atau asap-asap yang berbau, sedangkan blower dapat memindahkan campuran partikulat dan udara.
Fan Sentrifugal
a. Operasi fan sentrifugal dapat dideskripsikan oleh diagram vektor kecepatan.
b. Tinggi diagram yang diindikasikan oleh vektor kecepatan radial relatif (Vr)
c. Kecepatan udara (relatif terhadap bilah) yang ditunjukkan dengan Vb adalah
hampir tangensial terhadap bilah karena beberapa slip terjadi akibat
pengaruh-pengaruh lapisan batas.
d. Komponen kecepatan ujung (tip speed) ωr adalah tegak lurus dengan
jari-jari roda
Dimana ω adalah kecepatan putar impeller dalam radial per satuan waktu
dan r adalah jari-jari impeller pada titik ujung bilah (blade tip).
e. Karena laju roda adalah sama untuk setiap kasus, vektor ωr adalah konstan.
f. Kecepatan absolut yang diindikasikan oleh Vs adalah resultan dari Vb dan
ωr. Vektor kecepatan tangensial relatif yang diindikasikan dengan Vt
diproyeksikan dari Vs dalam arah ωr.
g. Jika volume menurun, vektor Vr menurun dan karena vektor Vb tidak
berubah untuk bilah tertentu, Vt meningkat terhadap bilah BI dan tetap
konstan dengan bilah R dan menurun dengan bilah FC.
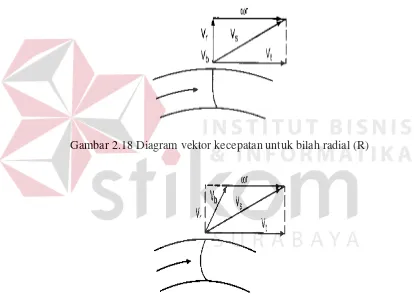
h. Karena tekanan fan bergantunf pada hasil kali Vt dan ωr, karakteristik
tekanan naik akibat volume menurun untuk nbilah BI (lihat Gambar 2.17)
dan konstan untuk bilah R (lihat Gambar 2.18), serta menurun untuk bilah
FC (lihat Gambar 2.19).
i. Diagram vektor ini mengilustrasikan bahwa pada laju tertentu, pemilihan
fan terkecil akan menjadi fan bengkol maju. Sebaliknya pemilihan terbesar
Gambar 2.17 Diagram vektor kecepatan keluaran untuk bilah
backward-inclined (BI)
Gambar 2.18 Diagram vektor kecepatan untuk bilah radial (R)
Gambar 2.19 Diagram vektor kecepatan keluaran untuk bilah forward-curved
(FC)
2.9 Fuzzy Logic
keanggotaan yang memiliki rentang nilai 0 (nol) hingga 1 (satu). Berbeda dengan
himpunan tegas yang memiliki nilai 1 atau nol (ya atau tidak).
Logika fuzzy merupakan suatu logika yang memiliki nilai kekaburan atau kesamaran (Fuzzyness) antara benar atau salah. Dalam teori logika fuzzy suatu nilai bisa bernilai benar atau salah secara bersamaan. Namun berapa besar keberadaan
dan kesalaan suatu tergantung pada bobot keanggotaan dalam rentang 0 dan 1.
Berbeda dengan logika digital yang hanya memiliki dua nilau 1 atau no. Logika fuzzy digunakan untuk menterjemahkan suatu besaran yang diekspresikan menggunakan bahasa (linguistic), misalkan besaran kecepatan laju kendaraan yang dieksprsikan dengan pelan, agak cepat, cepat dan sangat cepat. Dan logika fuzzy
menunjukkan sejauh mana suatu nilai itu benar dan sejauh mana suatu nilai itu
salah. Tidak seperti logika klasik (scrips) atau tegas, suatu nilai hanya mempunyai kemungkinan yaitu merupakan suatu anggota himpunan atau tidak. Derajat
keanggotaan 0 (nol) artinya nilai bukan merupakan anggotan himpuna dan 1 (satu) berarti nilai tersebut adalah anggota himpunan.
Logika Fuzzy memungkinkan nilai keanggotaan antara 0 dan 1, tingkat keabuan dan juga hitam dan putih., dan dalam bentuk linguistik, konsep tidak pasti
seperti “sedikit”, “lumayan” dan “sangat” (Zadeh 1965).
Kelebihan dari teori logika fuzzy adalah kemampuan dalam proses penalaran secara bahasa (linguistic reasoning). Sehingga dalam perancangannya tidak memerlukan persamaan matematik dari objek yang akan dikendalikan.
dipaparkan ide dasar fuzzy set yang meliputi inclusion, union, intersection, complement, relation dan convexity.
Lotfi Zadeh mengatakan Integrasi Logika Fuzzy kedalam sistem
informasi dan rekayasa proses adalah menghasilkan aplikasi seperti sistem
kontrol, alat alat rumah tangga, dan sistem pengambil keputusan yang lebih
fleksibel, mantap, dan canggih dibandingkan dengan sistem konvensional.
Dalam hal ini kami dapat mengatakan bahwa logika fuzzy memimpin dalam
pengembangan kecerdasan mesin yang lebih tinggi (machine Intelligency Quotient atau MIQ) Produk produk berikut telah menggunakan logika fuzzy dalam alat alat rumah tangga seperti mesin cuci, video dan kamera refleksi
lensa tunggal, pendingin ruangan, oven microwave, dan banyak sistem diagnosa
mandiri.
Fuzzy Logic merupakan kecerdasan buatan yang pertama kali
dipublikasikan oleh Prof.Dr. Lotfi Zadeh yang berasal dari Pakistan. Melalui
fuzzy logic ini sistem dapat membuat keputusan sendiri dan terkesan seperti
memiliki perasaan, karena memiliki keputusan lain selain iya (logika 1) dan
tidak (logika 0). Oleh karena itu fuzzy logic sangat berbeda jauh dari alur
logaritma pemrograman.
logika fuzzy sudah melekat pada diri manusia, sejak manusia ada.
Konsep logika fuzzy dapat dengan mudah kita temukan pada perilaku manusia
dalam kesehariannya, misalnya:
a. Pedal gas kendaraan akan kita tekan dengan tekanan tertentu sesuai
b. Kita cenderung memberi hadiah kepada seseorang dengan nilai tertentu
sesuai dengan manfaat orang tersebut kepada kita.
Sebagai contoh adalah robot yang menggunakan fuzzy logic dapat
memprediksikan kapan ia harus bertindak atau menghindar saat ada halangan
di depannya dengan hanya ada peringatan ‘awas’ dan tanpa ada hitungan
matematis yang diberikan oleh user. Sedangkan robot yang menggunakan
alogaritma pemrograman konvensional tidak akan dapat memutuskan sendiri
untuk menghindar dari halangan yang ada di depannya.
2.9.1 Himpunan Fuzzy
Pada himpunan tegas (crisp), nilai keanggotan suatu item x dalam suatu
himpunan A yang sering ditulis dengan μA[x], memiliki 2 kemungkinan yaitu:
1. Satu (1), yang berarti bahwa suatu item menjadi anggota dalam suatu
himpunan.
2. Nol (0), yang berarti bahwa suatu item tidak menjadi anggota dalam
suatu himpunan.
2.9.2 Fungsi Keanggotaan
Fungsi keanggotaan adalah suatu kurva yang menunjukan pemetaan
titik- titik input data kedalam nilai keanggotaannya (derajat keanggotaan) yang
memiliki interval antara 0 sampai 1.
2.9.3 Operator Dasar
Seperti halnya himpunan konvensional, ada beberapa operasi yang
didefinisikan secara khusus untuk mengkombinasi dan memodifikasi
himpunan fuzzy.
Operator ini berhubungan dengan operasi interseksi pada
himpunan. α-predikat sebagai hasil operasi dengan operator AND
diperoleh dengan mengambil nilai keanggotaan terkecil antar elemen
pada himpunan – himpunan yang bersangkutan.
μA∩B = min(μA[x], μB[y])
b. Operator OR
Operator ini berhubungan dengan operasi union pada
himpunan. α-predikat sebagai hasil operasi dengan operator OR
diperoleh dengan mengambil nilai keanggotaan terkecil antar elemen
pada himpunan – himpunan yang bersangkutan.
μAUB = max(μA[x], μB[y])
c. Operator NOT
Operator ini berhubungan dengan operasi komplemen pada
himpunan. α-predikat sebagai hasil operasi dengan operator NOT
diperoleh dengan mengambil nilai keanggotaan terkecil antar elemen
pada himpunan – himpunan yang bersangkutan.
μA’= 1-μA[x]
2.9.4 Penalaran Monoton
Metode ini digunakan sebagai dasar untuk teknik implikasi fuzzy. Jika 2 daerah fuzzy direalisasikan dengan implikasi sederhana sebagai berikut:
IF x is A THEN y is B
transfer fungsi:
Maka system fuzzy dapat berjalan tanpa harus melalui komposisi dan dekomposisi fuzzy. Nilai output dapat diestimasi secara langsung dari nilai keanggotaan yang berhubungan dengan antesedennya.
2.9.5 Fungsi Implikasi
Bentuk umum aturan yang digunakan dalam fungsi implikasi:
IF x is A THEN y is B
Dengan x dan y adalah skalar, A dan B adalah himpunan fuzzy. Proposisi yang mengikuti IF disebut anteseden, sedangkan proposisi yang mengikuti
THEN disebut konsekuen. Secara umum, ada dua fungsi implikasi, yaitu:
1. Min (minimum), fungsi ini akan memotong output himpunan fuzzy
2. Dot (product), fungsi ini akan menskala output himpunan fuzzy
2.9.6 Metode Sugeno
Penalaran dengan metode SUGENO hampir sama dengan penalaran
MAMDANI, hanya saja output (konsekuen) sistem tidak berupa himpunan
fuzzy, melainkan berupa konstanta atau persamaan linear. Metode ini diperkenalkan oleh Takagi-Sugeno Kang pada tahun 1985.
1. Model Fuzzy Sugeno Orde-Nol
Secara umum bentuk model fuzzy SUGENO Orde-Nol adalah: IF (x1 is A1) • (x2 is A2) • (x3 is A3) • ... • (xN is AN) THEN
z=k
dengan Ai adalah himpunan fuzzy ke-i sebagai anteseden, dan k adalah suatu konstanta (tegas) sebagai konsekuen.
2. Model Fuzzy Sugeno Orde-Satu
IF (x1 is A1) • ... • (xN is AN) THEN z =p1 * x1 + … + pN *
xN + q
dengan Ai adalah himpunan fuzzy ke-i sebagai anteseden, dan pi adalah suatu konstanta (tegas) ke-i dan q juga merupakan konstanta
dalam konsekuen. Apabila komposisi aturan menggunakan metode
SUGENO, maka deffuzifikasi dilakukan dengan cara mencari nilai
rata-ratanya. (Sri Kusuma Dewi dan Hari Purnama. 2009).
2.10 Hair Dryer
Hair dreyer merupakan salah satu alat yang mengubah energi listrik menjadi
energi panas. Hair Dreyer biasa di gunakan oleh kaum hawa untuk mengeringkan rambut. Dengan adanya alat pengering rambut maka rambut akan cepat keringnya,
dan mempercepat aktivitas lain. Pada Hair Dryer terdapat bagaia bagian yaitu: 1. Motor berfungi sebagai memutarkan kipas.
2. Thermostat berfungsi sebagai sebagai pengaman panas, thermostat
ini akan mematikan elemen pemanas bila panas pada elemen
pemanas berlebihan dan akan bekerja kembali bila temperatur pada elemen pemanas sudah turun hal ini terus berlanjut.
3. Elemen Pemanas berfungsi sebagai penghasil panas .
4. Saklar, saklar ini terdiri dari 2 sakla yaitu saklar on atau off yang berfungsi sebagai menjalankan motor dan elemn pemanas. Skalar
pengatur panas berfungsi sabagai menghubungkan dan mematikan
elemen pemanas.
37
METODE PENELITIAN
Perancangan perangkat keras dilakukan dengan metode penelitian yang
didasarkan pada studi kepustakaan berupa data-data literatur dari masing-masing
komponen, informasi dari internet, dan konsep-konsep teoretis dari buku-buku
penunjang. Setelah literatur terkumpul barulah dilakukan perancangan perangkat
keras yang dilanjutkan dengan perancangan dan pembuatan perangkat lunak yaitu
program sederhana untuk melakukan pengujian pada tiap bagian perangkat keras
yang telah dibuat dan program untuk menjalankan perangkat keras secara utuh.
Perancangan perangkat keras dan lunak dilakukan dengan metode penelitian yang
didasarkan pada studi kepustakaan berupa data-data literatur dari masing-masing
komponen, informasi dari internet, dan kosep-konsep teoritis dari buku-buku penunjang.
Dari data-data yang diperoleh maka dilakukan perancangan rangkaian
perangkat keras dan perangkat lunak. Dalam perangkat keras ini, penulis akan
melakukan pengujian perangkat keras dengan program-program yang telah
dirancang, kemudian melakukan kolaborasi perangkat keras dengan kerja perangkat
lunak yang telah selesai dirancang.
Pada bab ini akan dibahas mengenai masalah yang timbul dalam
perencanaan dan pembuatan perangkat keras (hardware) maupun perangkat lunak
Perancangan ini diperlukan sebelum proses pembuatan sistem tersebut,
perancangan ini berguna agar pengerjaan tahapan selanjutnya berjalan dengan
lancar. Tahapan-tahapan meliputi tahap pembuatan perangkat keras, perangkat
lunak dan menggabungkan keduanya.
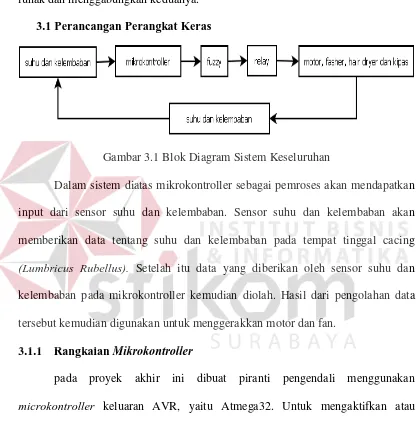
3.1Perancangan Perangkat Keras
Gambar 3.1 Blok Diagram Sistem Keseluruhan
Dalam sistem diatas mikrokontroller sebagai pemroses akan mendapatkan
input dari sensor suhu dan kelembaban. Sensor suhu dan kelembaban akan
memberikan data tentang suhu dan kelembaban pada tempat tinggal cacing
(Lumbricus Rubellus). Setelah itu data yang diberikan oleh sensor suhu dan kelembaban pada mikrokontroller kemudian diolah. Hasil dari pengolahan data
tersebut kemudian digunakan untuk menggerakkan motor dan fan.
3.1.1 Rangkaian Mikrokontroller
pada proyek akhir ini dibuat piranti pengendali menggunakan
microkontroller keluaran AVR, yaitu Atmega32. Untuk mengaktifkan atau menjalankan microkontroller ini diperlukan rangkaian minimum sistem. Rangkaian minimum sisterm tersebut terdiri rangkaian reset dan rangkaian osilator.
Untuk menjalankan microkontroller ini dibutuhkan sebuah rangkaian agar
microkontroller tersebut dapat bekerja dengan baik. Rangkaian mikrokontroller
Pada Pin VCC diberi masukan tegangan operasi berkisat antara 4.5 Volt
sampat dengan 5,5 Volt. Pin RST mendapatkan input dari manual reset. Rangkaian minimum sistem dapat terlihat pada gambar 3.2
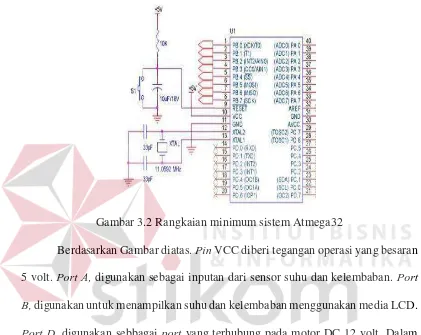
Gambar 3.2 Rangkaian minimum sistem Atmega32
Berdasarkan Gambar diatas. Pin VCC diberi tegangan operasi yang besaran 5 volt. Port A, digunakan sebagai inputan dari sensor suhu dan kelembaban. Port B, digunakan untuk menampilkan suhu dan kelembaban menggunakan media LCD.
Port D, digunakan sebbagai port yang terhubung pada motor DC 12 volt. Dalam gambar 5.3 diatas, pin XTAL1 dan XTAL2 dihubungkan dengan komponen XTAL sebesat 8,0000 MHz. Pemilhan frekuensi osilasi dari XTAL tersebut berdasarkan penggunaan microkontroller agar setiap clock mikrokontroller berlangsung setiap 1us. Berikut adalah perhitungan besar clock cycle yang dipakai:
1 siklus mesin = 8 clock
T(s) = 1 / F ... (3.1)
=
Kristal Frekuensi
x 8 / 1
=
M Hz 8 x 8 / 1
1
= 1 x 10-6
= 1 µs
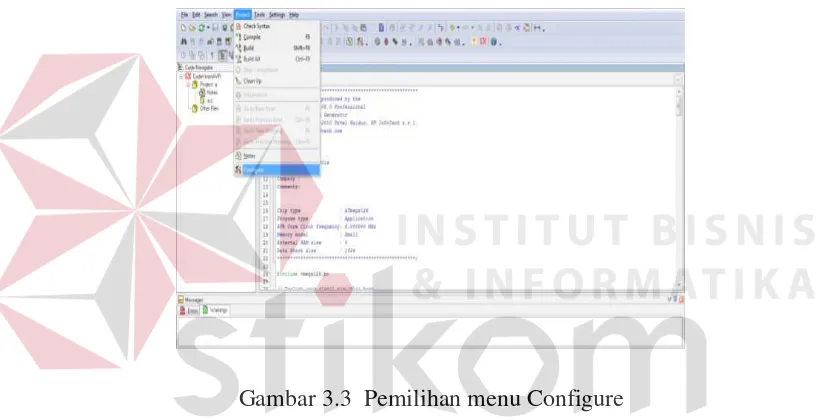
Untuk melakukan proses download program dari komputer kedalam memori program internal mikrokontroller, dapat dilakukan sebagai berikut :
1. Pilih menu bar Tool, pilih Configure.
Gambar 3.3 Pemilihan menu Configure
2. Pilih bagian After Build, centang Program the Chip, kemudian tekan OK. Beikut tampilan dari program Chip signature pada pada CodeVision AVR
yang akan digunakan untuk menuliskan program dan melakukan percobaan
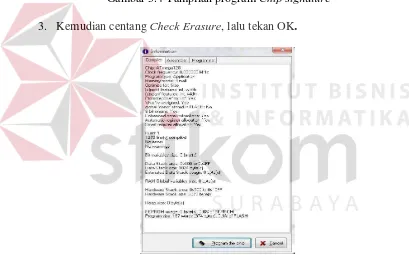
Gambar 3.4 Tampilan program Chip signature
3. Kemudian centang Check Erasure, lalu tekan OK.
Gambar 3.5 Proses centang Check Erasure
4. Kemudian “Run” program AVR, tekan Ctrl-F9, setelah muncul tampilan
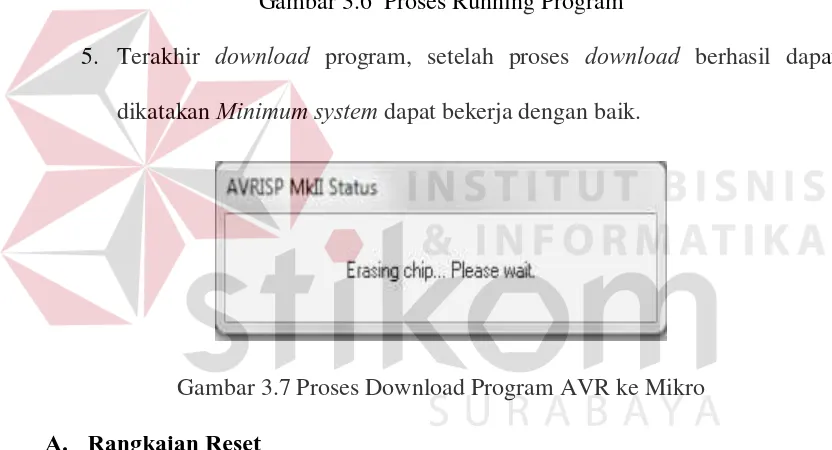
Gambar 3.6 Proses Running Program
5. Terakhir download program, setelah proses download berhasil dapat dikatakan Minimum system dapat bekerja dengan baik.
Gambar 3.7 Proses Download Program AVR ke Mikro
A. Rangkaian Reset
Pin reset pada microcontroller adalah pin (kaki) 1. Reset dapat dilakukan secara manual atau otomatis saat power dihidupkan (Power reset ON).
Gambar 3.8 Rangkaian Reset
reset
SW 1 C1
10uF/16v R1 10k
R2
100
Reset terjadi dengan adanya logika 1 selama minimal 2 machine cycle yang diterima pin reset dan akan bernilai low. Pada saat reset bernilai low,
microcontroller akan melakukan reset program yang ada di dalam microcontroller
dan mengakhiri semua aktivitas pada microcontroller.
B. Rangkaian osilator
Pin XTAL1 dan XTAL2 merupakan pin osilator bagi microkontroller
Atmega32. Pin XtAL1 berfungsin sebagai input dan XTAL2 sebagai output
osilator. Osilator ini bisa berasal dari kristal. Rangkaian osilator ini dapat dilihat
pada gambar 3.9.
Gambar 3.9 rangkaian osilator Atmega32
C. Interface I/O
Rangkaian I/O dari mikrokontroller mempunyai kontrol direksi yang tiap bitnya dapat dikonfigurasikan secara individual, makan dalam perancangan I/O ang digunakan ada yang berupa operasi port ada pula yang dikonfigurasi tiap bit yang ada pada masing-masing port yang terdapat pada mikrokontroller.
1. Port A
2. Port B
Port B digunakan untuk LCD (Liquid Crystal Display) agar dapat mengetahui suhu dan kelembaban yang ditangkap oleh LM35 dan Soil Moisture.
3. Port D
Port D digunakan untuk mengerakkan aktuator, seperti : motor, kipas,
headreyer dan fasher.
3.1.2 Rangkaian LM35
LM35 digunakan untuk mengetahui suhu. Sensor LM35 akan membaca
ACD terus menerus dan mengirimkan data ke microkontroller yang bertujuan agar suhu yang dihasilkan diolah agar sesuai dengan yang diinginkan. Pada LM35
terdapat 3 pin yang digunakan untuk jalor power 5 volt, ground dan data. Pin data
dapat langsung dihubungkan dengan mikrokontroller port A.0 tanpa tambahan
komponen apapun. LM35 akan menangkap data dari luar yang berupa suhu dan
kemudian dikirimkan ke miikrokontroller untuk diolah, data tersebut dikirimkan
oleh LM35 secara terus-menerus. Setelah itu mikrokontroller hanya mengukur suhu
tersebbt dan mengkonversikannya dalam bentuk suhu.
Pada gambar 3.10 ini adalah rangkaian sensor LM35 pada mikrokontroller.
3.1.3 Rangkaian Relay Motor DC
Motor DC memiliki dua kabel yang terhubung, kabel pertama untuk power supply dengan besaran 12 volt, kabel kedua digunkana untuk ground. Motor ini digunakan untuk memutar wadah tempat penyimpanan cacing yang tujuannya saat
mengalami penyiraman air pada kondisi suhu tinggi dan kelembaban kering, agar
grajen yang berada didalam wadah penyimpanan cacing tersebut mengalami
perubahan suhu dan kelembaban yang merata. Pergerakan motor ini tidak tentu
karena pergerakan motor tersebut diatur oleh perhitungan dengan menggunakan
metode fuzzy logic.
Motor yang digunakan adalah motor gear box yang membutuhkan tegangan
12 volt dengan ampere 50 ampere. Daya yang digunakan untuk menggerakkan
motor tersebut menggunakan aki mobil yang tegangan dan amperenya sesuai
dengan yang dibutuhkan oleh motor tersebut.
Pergerakkan motor tersebut diatur dengan menggunakan dua relay yang pertama outputan yang dihasilkan oleh mikrokonroller memicu relay 5 volt agar relay yang posisi awalnya berada pada posisi NO (Normali Open) akan terbukan menjadi NC (Normali close) saat relay pada posisi NC (normali Close) relay tersebut menghantarkan tegangan 12 volt yang berfungsi untuk memicu relay yang kedua. Sistem kerja relay kedua hampir sama dengan relay pertama bedanya relay
kedua digunakan untuk langsung menggerakkan motor DC tersebut. Gambar
3.11 Rangkaian relay motor DC
3.1.4 Rangkaian Relay Kipas
Kipas digunakan untuk mendinginkan suhu dan mengeringkan grajen yang
berada pada wadah cacing tersebut yang bertujan agar suhu dan kelembaban sesuai
dengan keadaan yang dibutuhkan oleh cacing tersebut.
Cacing jenis lunbricus rubellus membutuhkan suhu yang dengan dan kelembaban yang lebab, maka dari itu saat kelembaban mengalami kondisi yang
basah kipas akan hidup dan mengeringkan agar kelembaban yang berada pada
wadah cacing tersebut berubah menjadi lembab.
Selain itu, kipas ini akan menyala apabila suhu dalam wadah cacing tersebut
melebihi dari suhu yang dibutuhkan oleh cacing tersebut agar cacing dapat bertahan
hidup. Pergerakan kipas juga diatur oleh relay, tapi pada rangkaian kipas ini hanya
menggunakan satu relay.
3.12 Rangkaian relay Kipas Mikro
12 volt
12 volt
Mikro
3.1.5 Rangkaian Relay Hair Dryer
Hair dryer membutuhkan tegangan 220 volt AC, maka dari itu digunakan relay yang dapat dialirin tegangan sebesar yang dibutuhkan oleh Hair dryer
tersebut. Untuk rangkaian ini menggunakan dua relay, sistem kerjanya hampir sama
dengan rangkaian relay motor. Hair dryer ini digunakan untuk memanaskan suhu pada wadah cacing pada saat kondisi suhu didalam wadah cacing tersebut terlalu
dingin.
Suhu yang dibutukan oleh cacing sekitar 15-25o C, apabila data yang dikirim
oleh sensor LM35 tersebut kurang dari 150 C maka Hair dryer akan menyalah untuk menghangatkan suhu dalam wadah cacing tersebut sampai suhu benar-benar sesuai
dengan suhu yang dibutuhkan oleh cacing tersebut.
Nyala atau matinya Hair dryer diatur oleh dua relay, relay yang pertama outputan yang dihasilkan oleh microkonroller memicu relay 5 volt agar relay yang posisi awalnya berada pada posisi NO (Normali Open) akan terbukan menjadi NC
(Normali close) saat relay pada posisi NC (normali Close) relay tersebut menghantarkan tegangan 12 volt yang berfungsi untuk memicu relay yang kedua.
Sistem kerja relay kedua hampir sama dengan relay pertama bedanya relay kedua digunakan untuk langsung menggerakkan headreyer tersebut. Gambar rangkaian
relay Hair dryer ditunjukkan pada gambar 3.13.
3.13 Rangkaian relay Hair Dryer
Mikro
12 volt
3.1.6 Rangkaian Relay Fasher
fasher digunakan untuk menyiram grajen, proses penyiraman ini terjadi apabila kelembaban yang dihasilkan oleh sensor moisture dibawah 30% maka dari itu untuk meningkatkkan kelembaban untuk menghasilkan kelembaban yang
lembab maka fasher akan menyalah selama sensor kelembaban tidak menghasilkan data lebih dari 50%. Pada gambar 3.14 adalah gambar rangkaian dari relay fasher.
3.14 Rangkaian relay Fasher
3.2 Peletakan Komponen Elektronika
Rangkaian elektronika mulai dari rangkaian microkontroller, rangkaian
relay motor, rangkaian relay fasher, rangkaian relay motor, rangkaian relay Hair dreyer dan modul soil moisture, terletak pada bagian samping atau bagian terluar dari wadah tempat penyimpanan cacing. Sedangkan sensor soil moisture dan LM35 terdapat didalam wadah cacing. Berikut ini adalah gambar keseluruhan :
Mikro
3.15 Tampilan Alat Keseluruhan
Berikut arsitektur detail dari gambar 3.15 :
Ukuran dimensi
Ukuruan Alat : 80 cm x 60 cm x 60
Strruktur material :
1. Balok diameter 60 cm x 40 cm
2. Besi ukuran 80 cm x 60 cm x 60 cm
3. Mur dan baut
4. Aluminium
5. Pelekat
6. Kipas dengan diameter 140 mm
7. Selang
3.16 Peletakan Sensor kelembaban dan LM35
Sensor kelembaban dan sensor LM35 diletakkan pada bagian dalam wadah
cacing menempel dengan gajen kayu yang digunakan sebagai medianya untuk
mengetahui kelembaban dan suhu dalam wadah tersebut.
Gambar 3.17 Peletakan Motor
Motor diletakkan separuh bagian dalam dan separuh bagian luar. Pada
bagian luar tersebut untuk menggerakkan wadah saat proses pengadukkan
3.18 Peletakan Kipas
Kipas diletakkan pada bagian dalam dimana terdapat delapan kipas, empat
kipas untuk mengeluarkan udara yang berada dalam ruangan dan yang empat
untuk mengambil udara dari luar ruangan. Kipas tersebut berada pada bagian
depan dan belakang.
3.19 Peletakan Aki dan Botol fasher
3.20 Peletakan Hair dreyer
Hair Dreyer diletakkan pada bagian samping pada wadah cacing. Hair Dreyer ini langsung menghadap wadah cacing agar saat Hair Dreyer menyala panasnya akan menyeluruh.
Fasher ini diletakkan 2 pada bagian depan wadah, 1 pada bagian belakang wadah dan 1 pada bagian dalam wadah yang mana tujuannya agar saat penyiram
kelembaban akan merata.
3.22 Peletakkan komponen elektronika
Peletakkan komponen elektronika terletak pada bagian samping.
Komponen elektrronika ini mencakup rangkaian relay motor, fasher, Hair Dreyer
dan kipas serta display LCD.
Peletakan wadah cacing berada pada bagian dalam kotak dan berada pada
posisi tengah pada kotak tersebut.
3.3Perancangan Perangkat Lunak
Perangkat lunak bertujuan untuk mengirim dan menerima input output dari
sensor kelembaban dan suhu. Minimum sistem memperoleh data dari LM35 dan
soil moisture yang berupa ADC yang kemudian diolah menjadi kelembaban dan celcius yang bertujuan agar dapat menggerakkan aktuator.
Perancangan perangkat lunak terbagi dalam beberapa program antara lain :
Program LM35, Program soil moisture, dan algoritma fuzzy. Diagram alir perangkat lunak secara umum dapat dilihat pada gambar 3.24.
3.3.1 Program Membaca Suhu dan Kelembaban
Diagram alir untuk mengetahui suhu dan kelembaban berdasarkan
pembacaan sensor LM35 dan Sensor Soil Moisture terdapat pada gambar 3.25.
Gambar 3.25. Diagram alir pembacaan sensor LM35 dan Soid Moisture
Pada gambar 3.25, pembacaan LM35 dan Soil Moisture dimulai dengan inisialisasi sensor LM35 dan sensor Soil Moisture. Jika data LM35 dan data soil moisture berhasil dibaca maka data keduannya akan diproses oleh microkontroller
dan dimasukkan kedalam algoritma fuzzy setelah itu ditampilkan ke LCD. Berikut ini potongan program pembacaan LM35 dan soil moisture serta menampilkan ke
display LCD :
hasil = read_adc(0x00);
hasil = ((float)hasil*2500);
hasil = hasil/255;
hasil = hasil/10;
a = read_adc (0x01);
a = ((float) 255-a);
a = a/2,5;
lcd_gotoxy(0,0);
lcd_putsf ("Suhu : ");
ftoa(hasil,1,temp);
lcd_gotoxy(7,0);
lcd_puts(temp);
lcd_gotoxy(0,1);
lcd_putsf ("lembab : ");
itoa(a,temp1);
lcd_gotoxy(8,1);
lcd_puts(temp1);
3.3.2 Fuzzy
Untuk menentukan pergerakan aktuator terdapat tiga proses yaitu :
1. Fuzzifikasi
Pada proses fuzzifikasi ini terjadi pengambilan keputusan dengan cara mengubah masukkan crisp (bentuk tegas) menjadi
fuzzy (variabel linguistik). Pengubahan crisp menjadi fuzzy
dapat dilihat pada gambar 3.26.
Gambar 3.27 Pemetaan Keanggotaan Kelembaban
Realisasi proses memperoleh nilai derajat keanggotaan dari
masing-masing fungsi keanggotaana adalah sebagai berikut :
return suhu_sejuk;
};
2. Rule Set
Rule set adalah proses evaluasi derajat keanggotaan tiap-tiap fungsi himpunan fuzzy masukan kedalam basis aturan yang telah ditetapkan. Tujuan evaluasi ini adalah menentukan derajat
keanggotaan dari nilai fuzzy.
Sebelum melakukan evalusi aturan terlebih dahulu ditetap oleh
basis aturan. Basis aturan merupakan keseluruhan aturan dari
kombinasi dua masukkan yang mungkin secara lengkap jumlah
kombinasi yang mungkin dari dua himpunan fuzzy masukkan terdiri lima himpunan fuzzy dan tiga himpunan fuzzy fungsi keanggotaan sehingga jumlah aturan adalah lima belas aturan. Lima belas aturan
kendali fuzzy dapat dilihat pada tabel 3.1.
Tabel 3.1. Penentuan Rule Set
suhu
Dari tabel diatas dapat diartikan sebagai berikut :
IF kering AND dingin THEN motor, fasher, hairdryer.
IF kering AND sedang THEN motor, fasher.
IF kering AND normal THEN motor, fasher.
IF kering AND hangat THEN motor, fasher.
IF lembab AND dingin THEN diam.
IF lembab AND sedang THEN diam.
IF lembab AND normal THEN kipas.
IF lembab AND hangat THEN kipas.
IF lembab AND panas THEN kipas.
IF basah AND dingin THEN kipas, hairdryer.
IF basah AND sedang THEN kipas, hairdryer.
IF basah AND normal THEN kipas, hairdryer.
IF basah AND hangat THEN kipas.
IF basah AND panas THEN kipas.
Keterangan :
D : Dingin
S : Sedang
N : Normal
H : Hangat
P : Panas
K : Kering
L : Lembab
B : Basah
DM : Diam
KH : Kipas dan Hair dryer
K : Kipas
MFH : Motor, Fasher danHair dryer
3. Defuzzifikasi
Defuzzifikasi adalah mengubah himpunan fuzzy keluaran menjadi keluaran tegas (crisp). Pengubahan ini diperlkan karena konstata kendali fuzzy hanya menal nilai tegas sebagai variabel kontrol. Realisasi proses pengambilan keputusan
metode sugeno menjadi bentuk crisp output dapat menggunakan rumus sebagai berikut :
Dibawah ini adalah tampilan fungsi keanggotaan dari proses defuzzifikasi :
Gambar 3.28. fungsi keanggotaan output
Nilai z yang dihasilkandefuzzifikasi berfungsi untuk menentukan suatu nilai crips
output. suatu nilai fuzzy output yang berasal dari evaluasi rule diambil kemudian
dimasukkan ke dalam suatu fungsi keanggotaan keluaran (membership function output). Besar nilai fuzzy output dinyatakan sebagai degree of membership function output. Nilai-nilai tersebut dimasukkan ke dalam suatu rumus untuk mendapatkan hasil akhir yang disebut crisp output.
61
Pengujian sistem yang dilakukan penulis ini merupakan pungujian terhadap
perangkat keras dan perangkat lunak dari sistem secara keseluruhan yang telah
selesai dibuat untuk mengetahui komponen-komponen dari sistem tersebut apakan
berjalan dengan baik.
4.1 Pengujian Minimum Systen
4.1.1 Tujuan
Pengujian minimum sytem ini bertujuan untuk mengetahui apakah
minimum system yang dipakai pada alat tersebut dapat melakukan signature
dan dapat di download program ke dalam microcontroller dengan baik.
4.1.2 Alat yang digunakan
Peralatan yang digunakan penulis untuk pengujian ini adalah sebagai
berikut :
1. Rangkaian minimum system ATMega32. 2. Downloader.
3. PC atau Laptop.
4. Program CVAVR (CodeVisionAVR).
5. Regulator +5V.
6. Kabel downloader.
4.1.3 Prosedur Pengujian