RANCANG BANGUN ALAT PENDINGIN RUANGAN OTOMATIS
RANCANG BANGUN ALAT PENDINGIN RUANGAN OTOMATIS BERBASISBERBASIS KEBERADAAN MANUSIA DAN SUHU RUANGAN
KEBERADAAN MANUSIA DAN SUHU RUANGAN
Disusun Oleh: Disusun Oleh: Nama
Nama : : Taufik Taufik HidayatHidayat NPM
NPM : : 2110765721107657 Jurusan
Jurusan : : Sistem Sistem KomputerKomputer Pembimbing
Pembimbing : : Dr. Dr. LussiLussiana ana ETP, ETP, SSiSSi., ., MT.MT.
Diajukan Guna Melengkapi Sebagian Syarat Dalam Mencapai Diajukan Guna Melengkapi Sebagian Syarat Dalam Mencapai
Gelar Sarjana Strata Satu (S1) Gelar Sarjana Strata Satu (S1)
Jakarta
Jakarta
2011
2011
ii N
N a a m m a a :: Taufik HidayatTaufik Hidayat NPM
NPM : : 2110765721107657 Jurusan
Jurusan : : Sistem Sistem KomputerKomputer Fakultas
Fakultas : : Ilmu Ilmu KomputerKomputer Judul
Judul Skripsi Skripsi :: Rancang Bangun Alat Pendingin Ruangan OtomatisRancang Bangun Alat Pendingin Ruangan Otomatis Berbasis Keberadaan Manusia Dan Suhu Ruangan
Berbasis Keberadaan Manusia Dan Suhu Ruangan
Dengan ini menyatakan bahwa tulisan ini adalah merupakan hasil karya Dengan ini menyatakan bahwa tulisan ini adalah merupakan hasil karya saya sendiri dan dapat dipublikasikan sepenuhnya oleh Universitas Gunadarma. saya sendiri dan dapat dipublikasikan sepenuhnya oleh Universitas Gunadarma. Segala kutipan dalam bentuk apa pun telah mengikuti kaidah, etika yang berlaku. Segala kutipan dalam bentuk apa pun telah mengikuti kaidah, etika yang berlaku. Mengenai isi dan tulisan adalah merupakan tanggung jawab Penulis, bukan Mengenai isi dan tulisan adalah merupakan tanggung jawab Penulis, bukan Universi
Universitas tas GunadarmaGunadarma..
Demikian, pernyataan ini saya buat dalam keadaan sadar dan tidak Demikian, pernyataan ini saya buat dalam keadaan sadar dan tidak dipaksakan. dipaksakan. Depok, Agustus 2011 Depok, Agustus 2011 Taufik Hidayat Taufik Hidayat
ii ii No
No Nama Nama KedudukanKedudukan
1
1 Dr. Dr. LussiLussiana ana ETP, ETP, SSi., SSi., MT. MT. KetuaKetua 2
2 Dr.rer.nat. Dr.rer.nat. AvinanAvinanta ta Tarigan Tarigan AnggotaAnggota 3
3 Drs. Drs. Lingga Lingga Hermanto, Hermanto, MM., MM., MSi. MSi. AnggotaAnggota
Tanggal Sidang: 19 November 2011 Tanggal Sidang: 19 November 2011
Panitia Ujian Panitia Ujian No
No Nama Nama KedudukanKedudukan
1
1 DrDr. . RaRavvi i AhAhmmad ad SaSalilim m KKetetuaua 2
2 Prof. Prof. Dr. Dr. WahyWahyudi udi Priyono Priyono SekretarisSekretaris 3
3 Dr. Dr. LussiLussiana ana ETP, ETP, SSi., SSi., MT. MT. AnggotaAnggota 4
4 Dr.rer.nat. Dr.rer.nat. AvinanAvinanta ta Tarigan Tarigan AnggotaAnggota 5
5 Drs. Drs. Lingga Lingga Hermanto, Hermanto, MM., MM., MSi.MSi. AnggotaAnggota
Tanggal Lulus: 19 November 2011 Tanggal Lulus: 19 November 2011
Menyetujui, Menyetujui,
Pembimbing Pembimbing
(Dr. Lussiana ETP, SSi., MT.) (Dr. Lussiana ETP, SSi., MT.)
iii iii
dan Suhu Ruangan dan Suhu Ruangan
Skripsi. Fakultas Ilmu Komputer. Universitas Gunadarma. 2011 Skripsi. Fakultas Ilmu Komputer. Universitas Gunadarma. 2011
Kata Kunci: Hemat Listrik, Deteksi Suhu, Deteksi Gerak, Otomatis, Kipas Angin Kata Kunci: Hemat Listrik, Deteksi Suhu, Deteksi Gerak, Otomatis, Kipas Angin (ix + 58 + Lampiran)
(ix + 58 + Lampiran)
Penghematan energi listrik merupakan hal yang sangat diperlukan. Dampak dari Penghematan energi listrik merupakan hal yang sangat diperlukan. Dampak dari kota metropolitan salah satunya adalah kebutuhan listrik yang kian meningkat akibat kota metropolitan salah satunya adalah kebutuhan listrik yang kian meningkat akibat banyaknya kaum urban untuk menuntut ilmu dan mencari nafkah. Untuk itu perlu adanya banyaknya kaum urban untuk menuntut ilmu dan mencari nafkah. Untuk itu perlu adanya solusi alternatif peralatan listrik yang dapat
solusi alternatif peralatan listrik yang dapat menghemmenghemat at energi.energi.
Tujuan penelitian ini adalah merancang sebuah kipas angin yang mampu Tujuan penelitian ini adalah merancang sebuah kipas angin yang mampu mengatur kecepatan secara otomatis berdasarkan pada keberadaan manusia dan suhu mengatur kecepatan secara otomatis berdasarkan pada keberadaan manusia dan suhu ruangan.
ruangan.
Hasil pengujian menunjukkan bahwa
Hasil pengujian menunjukkan bahwa bahwa alat ini bekerja sesuai denganbahwa alat ini bekerja sesuai dengan rancangannya, dimana jika tidak terdeteksi adanya gerakan maka kipas akan diam, rancangannya, dimana jika tidak terdeteksi adanya gerakan maka kipas akan diam, dan jika terdeteksi adanya gerakan maka kipas akan bekerja. Jarak pendeteksian dan jika terdeteksi adanya gerakan maka kipas akan bekerja. Jarak pendeteksian gerakan antara 10 cm hingga 240 cm. Selanjutnya, pergerakan kipas ini gerakan antara 10 cm hingga 240 cm. Selanjutnya, pergerakan kipas ini dipengaruhi oleh suhu, dimana jika suhu ruangan meningkat maka kecepatan dipengaruhi oleh suhu, dimana jika suhu ruangan meningkat maka kecepatan putaran kipas angin juga akan semakin meningkat.
putaran kipas angin juga akan semakin meningkat.
Daftar Pustaka (1992 – 2011) Daftar Pustaka (1992 – 2011)
iv iv
memberikan bimbingan, petunjuk serta hidayah-Nya hingga penulisan tugas akhir memberikan bimbingan, petunjuk serta hidayah-Nya hingga penulisan tugas akhir yang berjudul “Rancang Bangun Alat Pendingin Ruangan Otomatis Berbasis yang berjudul “Rancang Bangun Alat Pendingin Ruangan Otomatis Berbasis Keberadaan Manusia Dan Suhu Ruangan” dapat diselesaikan.
Keberadaan Manusia Dan Suhu Ruangan” dapat diselesaikan.
Adapun maksud dan tujuan penulisan skripsi ini adalah guna melengkapi Adapun maksud dan tujuan penulisan skripsi ini adalah guna melengkapi syarat untuk mencapai jenjang Sarjana pada Universitas Gunadarma.
syarat untuk mencapai jenjang Sarjana pada Universitas Gunadarma.
Penulis menyadari dengan kerendahan hati bahwa dalam makalah Penulis menyadari dengan kerendahan hati bahwa dalam makalah penulisan skripsi ini masih banyak terdapat kelemahan dan kekurangan. Oleh penulisan skripsi ini masih banyak terdapat kelemahan dan kekurangan. Oleh sebab itu penulis sangat mengharapkan kritik dan saran dari para pembaca untuk sebab itu penulis sangat mengharapkan kritik dan saran dari para pembaca untuk memperbaiki penulisan ini agar lebih baik lagi.
memperbaiki penulisan ini agar lebih baik lagi.
Dalam kesempatan ini penulis ingin menyampaikan rasa terima kasih yang Dalam kesempatan ini penulis ingin menyampaikan rasa terima kasih yang sebesar-besarnya kepada:
sebesar-besarnya kepada:
1. Ibu Prof. Dr. E.S. Margianti, SE. MM, selaku Rektor Universitas 1. Ibu Prof. Dr. E.S. Margianti, SE. MM, selaku Rektor Universitas
Gunadarma. Gunadarma. 2.
2. Bapak Prof. Dr. Rernat. Bapak Prof. Dr. Rernat. A. Beny A. Beny Mutiara.Mutiara., selaku , selaku Dekan Fakultas IlmuDekan Fakultas Ilmu Komputer Dan Teknologi I
Komputer Dan Teknologi Informasi Universitas Gunadarma.nformasi Universitas Gunadarma. 3.
3. Bapak Bapak Dr. Dr. –Ing. –Ing. Farid Farid ThaliThalib., b., selaku selaku Ketua Ketua Jurusan Jurusan Teknik Teknik KomputerKomputer Universi
Universitas tas GunadarmGunadarma.a. 4.
4. Bapak Dr. Edi Bapak Dr. Edi Sukirman, MM, selaku Kepala Bagian Sidang UjianSukirman, MM, selaku Kepala Bagian Sidang Ujian Universi
Universitas tas GunadarmGunadarma.a. 5.
5. Ibu Dr. LusIbu Dr. Lussiana ETP, siana ETP, SSi., MT., selSSi., MT., selaku Dosen Pembimbing aku Dosen Pembimbing PenulisaPenulisann skripsi Jurusan Sistem Komputer
v v pembuatan alat.
pembuatan alat.
8. Rekan-rekan asisten Lab Elkom, Iman Ilmawan Muharam, Maulana 8. Rekan-rekan asisten Lab Elkom, Iman Ilmawan Muharam, Maulana
Rahmat Hakim, Nugroho Tri Sayoga, dan Muhammad Regi Fazmi. Rahmat Hakim, Nugroho Tri Sayoga, dan Muhammad Regi Fazmi. 9.
9. Teman-teman di Teman-teman di kelas 4KB01 skelas 4KB01 serta semua merta semua mahasiswa/i jurusan ahasiswa/i jurusan SistemSistem Komputer Universitas Gunadarma
Komputer Universitas Gunadarma
10. Pihak-pihak lain yang tak dapat penulis sebutkan satu per satu yang telah 10. Pihak-pihak lain yang tak dapat penulis sebutkan satu per satu yang telah membantu baik secara langsung maupun tidak langsung dalam membantu baik secara langsung maupun tidak langsung dalam penyelesaian makalah skripsi ini.
penyelesaian makalah skripsi ini.
Semoga Allah SWT membalas segala kebaikannya. Akhir kata penulis Semoga Allah SWT membalas segala kebaikannya. Akhir kata penulis berharap semoga penulisan ilmiah ini dapat berguna dan bermanfaat bagi semua berharap semoga penulisan ilmiah ini dapat berguna dan bermanfaat bagi semua pembaca. pembaca. Depok, Oktober 2011 Depok, Oktober 2011 Penulis Penulis
vi vi
LEMBAR PENGESAHAN ……….ii
LEMBAR PENGESAHAN ……….ii
ABSTRAK ……….iii
ABSTRAK ……….iii
KATA PENGANTAR ………...iv
KATA PENGANTAR ………...iv
DAFTAR ISI………...vi
DAFTAR ISI………...vi
DAFTAR DAFTAR GAMBAR GAMBAR ………viii………viii
DAFTAR TABEL ………..ix
DAFTAR TABEL ………..ix
BAB 1 PENDAH BAB 1 PENDAHULU ………ULU ……….1……….1
1.1 1.1 Latar Belakang Masalah……….1Latar Belakang Masalah……….1
1.2 1.2 Rumusan MRumusan Masalah asalah ………..2………..2
1.3 1.3 Batasan Masalah ………2Batasan Masalah ………2
1.4 1.4 Tujuan Penelitian ………...2Tujuan Penelitian ………...2
1.5 1.5 Metode Penelitian ………..3Metode Penelitian ………..3
1.6 1.6 Sistematika Penulisan ………3Sistematika Penulisan ………3
BAB BAB 2 2 TINJAUAN TINJAUAN PUSTAKA PUSTAKA ………...5………...5
2.1 2.1 Mikrokontroler Mikrokontroler ATMEGA8535 ATMEGA8535 sebagai sebagai Prosessor Prosessor ………...5……...5
2.1.1 2.1.1 Analog Analog to to Digital Digital ConvertConverter er ………...8………...8
2.2 2.2 Motor DC Motor DC sebagai sebagai Penggerak Kipas Penggerak Kipas Angin Angin ……….13……….13
2.3 2.3 IC IC L293 L293 sebagai sebagai MotoMotor r Driver Driver ……….15……….15
2.3.1 2.3.1 Pulse Pulse Width Width Modulation Modulation ………..17……..17
2.3 2.3 Passive Passive Infrared RInfrared Receiver eceiver sebagai sebagai Pendeteksi Pendeteksi Manusia Manusia ………..18………..18
2.4 2.4 LM35 LM35 sebagai sebagai Sensor Sensor Suhu Suhu ……….19……….19
2.5 2.5 Liquid Liquid Crystal Crystal Display Display sebagai sebagai Layar Layar Tampilan Tampilan ……….20…….20
2.6 2.6 Bahasa Bahasa C C sebagai sebagai Bahasa Bahasa Program Program Mikrokontroler Mikrokontroler ………23……23
vii vii 3.1.1
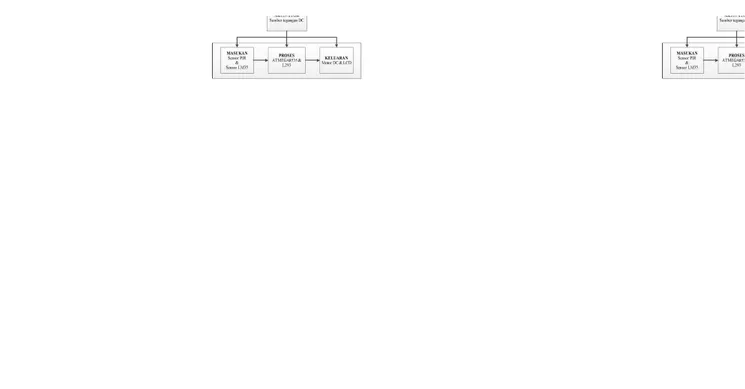
3.1.1 Perancangan Alur Kerja Alat ………...25Perancangan Alur Kerja Alat ………...25 3.1.2
3.1.2 Perancangan Rangkaian Alat ………...27Perancangan Rangkaian Alat ………...27 3.1.3
3.1.3 Perancangan Maket Alat ………..32Perancangan Maket Alat ………..32 3.2
3.2 Perancangan Perancangan ProgProgram ram ………..33………..33 3.2.1
3.2.1 Algoritma Algoritma Program Program ……….………..33.33 3.2.2
3.2.2 Pembuatan Program ……….36Pembuatan Program ……….36 3.2.3
3.2.3 Pengisian Program ………...43Pengisian Program ………...43 BAB
BAB 4 4 HASIL HASIL DAN DAN ANALISIS ANALISIS ………46………46 4.1
4.1 Pengujian Pengujian Jarak Jarak Deteksi Deteksi Gerakan Gerakan Manusia…………Manusia………...46...46 4.2
4.2 Pengujian Pengujian Pengukuran Pengukuran Suhu Suhu ………48………48 4.3
4.3 Pengujian Pengujian Kecepatan Kecepatan Kipas Kipas Angin Angin ………..49………..49 4.4
4.4 Pengujian Pengujian Kerja Kerja LCD LCD ………...51………...51 4.5
4.5 Pengujian Pengujian Kerja Kerja Kipas Kipas Angin Angin OtoOtomatis matis ………..52………..52 4.6
4.6 Analisa Analisa Rangkaian Rangkaian secara secara Detail………..Detail………..5454 BAB
BAB 5 5 PENUTUP ………PENUTUP ……….56….56 5.1
5.1 KesimpulaKesimpulan n ………..56………..56 5.2
5.2 Saran Saran ………57………57 DAFTAR P
DAFTAR PUSTAKA ………USTAKA ………5858 LAMPIRAN
viii viii Gambar
Gambar 2.2 2.2 StruktStruktur ur motor motor DC DC ……….14……….14 Gambar
Gambar 2.3 2.3 Skematik Skematik IC IC L293 L293 ………..16………..16 Gambar
Gambar 2.4 2.4 Rangkaian Rangkaian sensor sensor PIR PIR ………...18………...18 Gambar
Gambar 2.5 2.5 Cara Cara Kerja Kerja sensor sensor LM35 LM35 ………19………19 Gambar
Gambar 2.6 2.6 Skematik Skematik Rangkaian Rangkaian Interface Interface LCD ...LCD ...21...21 Gambar
Gambar 3.1 3.1 Rancangan Rancangan alur alur kerja kerja kipas kipas angin angin otootomatis………26matis………26 Gambar
Gambar 3.2 3.2 Rancangan Rancangan rangkaiarangkaian n alat alat secara secara keselurukeseluruhan han ………...27………...27 Gambar
Gambar 3.3 3.3 Rancangan Rancangan alat alat secara secara detail detail 1 1 ………...28………...28 Gambar
Gambar 3.4 3.4 Rancangan Rancangan alat alat secara secara detail detail 2 ………..282 ………..28 Gambar
Gambar 3.5 3.5 Rancangan Rancangan alat alat secara secara detail detail 3 3 ………...29………...29 Gambar
Gambar 3.6 3.6 Rancangan Rancangan alat alat secara secara detail detail 4 4 ………...29………...29 Gambar
Gambar 3.7 3.7 Rancangan Rancangan alat alat secara secara detail detail 5 5 ………...30………...30 Gambar
Gambar 3.8 3.8 Rancangan Rancangan alat alat secara secara detail detail 6 ………..316 ………..31 Gambar
Gambar 3.9 3.9 Rancangan Rancangan alat alat secara secara detail detail 7 7 ………...31………...31 Gambar
Gambar 3.10 3.10 Desain Desain maket amaket alat lat tampak tampak depan………32depan………32 Gambar 3.11
Gambar 3.11 Flowchart program kipas Flowchart program kipas angin angin otootomatis matis ………...34………...34 Gambar 3.12
Gambar 3.12 Blok Blok proses dproses downloader ownloader ……….43……….43 Gambar 3.12
Gambar 3.12 Konfigurasi Konfigurasi program kipas anprogram kipas angin otomatis gin otomatis ………44…………44 Gambar
ix ix
Tabel 2.2 Konfigurasi bit 6 & 7 register ADMUX ……….9
Tabel 2.2 Konfigurasi bit 6 & 7 register ADMUX ……….9
Tabel 2.3 Konfigurasi channel ADC ……….10
Tabel 2.3 Konfigurasi channel ADC ……….10
Tabel 2.4 Daftar bit register ADCSRA ……….10
Tabel 2.4 Daftar bit register ADCSRA ……….10
Tabel 2.5 Konfigurasi faktor Tabel 2.5 Konfigurasi faktor pembagi frekuensi clock pembagi frekuensi clock CPU ………CPU ………1212 Tabel 2.6 Daftar bit register SFIOR ………..12
Tabel 2.6 Daftar bit register SFIOR ………..12
Tabel 2.7 Konfigurasi pemicu eksterna Tabel 2.7 Konfigurasi pemicu eksternal operasi ADC l operasi ADC ……….13………….13
Tabel 2.8 Daftar Pin Tabel 2.8 Daftar Pin LCD HD44780 LCD HD44780 ………21………21
Tabel 3.1 Spesifikasi rancangan program kipas angin otomatis Tabel 3.1 Spesifikasi rancangan program kipas angin otomatis ………...35...35
Tabel 4.1 Hasil pengujian jarak deteksi gerakan manusia ………47
Tabel 4.1 Hasil pengujian jarak deteksi gerakan manusia ………47
Tabel 4.2 Hasil pengujian pengukuran suhu ……….48
Tabel 4.2 Hasil pengujian pengukuran suhu ……….48
Tabel Tabel 4.3 Pengujian Kecepatan Kipas 4.3 Pengujian Kecepatan Kipas Angin Angin ………...50………...50
Tabel 4.4 Pengujian kerja LCD ………...51
Tabel 4.4 Pengujian kerja LCD ………...51
Tabel 4.5 Pengujian kerja kipas angin otomatis ………53
1 1 1.1
1.1 Latar Belakang MasalahLatar Belakang Masalah
Belum lama ini isu mengenai pemanasan global dibicarakan oleh seluruh Belum lama ini isu mengenai pemanasan global dibicarakan oleh seluruh orang di dunia. Iklim yang tidak menentu, meningkatnya tinggi permukaan air orang di dunia. Iklim yang tidak menentu, meningkatnya tinggi permukaan air laut, dan meningkatnya suhu di seluruh penjuru bumi merupakan beberapa efek laut, dan meningkatnya suhu di seluruh penjuru bumi merupakan beberapa efek yang timbul dari pemanasan global. Peristiwa ini terjadi karena meningkatnya yang timbul dari pemanasan global. Peristiwa ini terjadi karena meningkatnya konsentrasi gas-gas rumah kaca seperti karbon
konsentrasi gas-gas rumah kaca seperti karbon dioksidioksida, akibat da, akibat aktiviaktivitas tas manusiamanusia,, sehingga radiasi matahari yang seharusnya dipantulkan kembali dari bumi
sehingga radiasi matahari yang seharusnya dipantulkan kembali dari bumi setelahsetelah masuk ke bumi,
masuk ke bumi, menjadi terperangkap.menjadi terperangkap.
Ada dua pendekatan utama untuk memperlambat semakin bertambahnya Ada dua pendekatan utama untuk memperlambat semakin bertambahnya gas rumah kaca. Pertama, mencegah karbon dioksida dilepas ke atmosfer dengan gas rumah kaca. Pertama, mencegah karbon dioksida dilepas ke atmosfer dengan menyimpan gas tersebut atau komponen karbon-nya di tempat lain, yang menyimpan gas tersebut atau komponen karbon-nya di tempat lain, yang disebut
disebut carbonsequestrationcarbonsequestration (menghilangkan (menghilangkan karbon). karbon). Kedua, Kedua, mengurangimengurangi produksi gas rumah kaca. Salah satu cara yang bisa dilakukan untuk mengurangi produksi gas rumah kaca. Salah satu cara yang bisa dilakukan untuk mengurangi produksi gas rumah kaca adalah
produksi gas rumah kaca adalah dengan menghemat penggunadengan menghemat penggunaan energi an energi listrik.listrik. Telah banyak diketahui bahwa Jakarta merupakan kota impian dan kota Telah banyak diketahui bahwa Jakarta merupakan kota impian dan kota tujuan para penduduk daerah sebagai kota pariwisata, tempat mencari nafkah, tujuan para penduduk daerah sebagai kota pariwisata, tempat mencari nafkah, sampai dengan tempat menuntut ilmu. Akibat dari berbagai macam tujuan para sampai dengan tempat menuntut ilmu. Akibat dari berbagai macam tujuan para pendatang tersebut, maka kota Jakarta menjadi kota yang sangat dinamis dengan pendatang tersebut, maka kota Jakarta menjadi kota yang sangat dinamis dengan pembangunan gedung-gedung perkantoran, gedung sekolah, pusat perbelanjaan, pembangunan gedung-gedung perkantoran, gedung sekolah, pusat perbelanjaan, bahkan sampai dengan perumahan untuk tempat tinggalpun meningkat dengan bahkan sampai dengan perumahan untuk tempat tinggalpun meningkat dengan tajam, sehingga memiliki kontribusi yang tinggi dalam pe
tajam, sehingga memiliki kontribusi yang tinggi dalam pe nggunanggunaan energi listran energi listrik.ik. Berkaitan dengan pesatnya pertumbuhan tempat pemukiman baru, banyak Berkaitan dengan pesatnya pertumbuhan tempat pemukiman baru, banyak dijumpai rumah-rumah atau kamar-kamar yang tersedia kurang memenuhi dijumpai rumah-rumah atau kamar-kamar yang tersedia kurang memenuhi persyaratan kesehatan, seperti misalnya kurangnya ventilasi, ruang yang terlalu persyaratan kesehatan, seperti misalnya kurangnya ventilasi, ruang yang terlalu sempit, dan penggunaan satu ruang digunakan secara bersama sehingga menjadi sempit, dan penggunaan satu ruang digunakan secara bersama sehingga menjadi terasa sempit. Berdasarkan pada kondisi t
tersedia menggunakan alat bantu yang terjangkau seperti kipas angin, sering kali tersedia menggunakan alat bantu yang terjangkau seperti kipas angin, sering kali dibiarkan menyala terus menerus tanpa memperdulikan efek pemborosan dibiarkan menyala terus menerus tanpa memperdulikan efek pemborosan listriknya.
listriknya.
Oleh karena itu, keinginan yang kuat serta kesabaran yang tinggi sangat Oleh karena itu, keinginan yang kuat serta kesabaran yang tinggi sangat diperlukan dalam melakukan kegiatan penghematan energi listrik ini, yaitu saat diperlukan dalam melakukan kegiatan penghematan energi listrik ini, yaitu saat mematikan alat-alat listrik yang tidak digunakan, contohnya mematikan kipas mematikan alat-alat listrik yang tidak digunakan, contohnya mematikan kipas angin saat tidak ada orang yang menggunakan, atau mengurangi kecepatan putar angin saat tidak ada orang yang menggunakan, atau mengurangi kecepatan putar kipas angin saat udara tidak terlalu panas. Namun, tidak semua orang mau kipas angin saat udara tidak terlalu panas. Namun, tidak semua orang mau melakukan hal yang mudah ini karena malas, lupa dan sebagainya, sehingga melakukan hal yang mudah ini karena malas, lupa dan sebagainya, sehingga membiarkan kipas angin menyala, dan tidak hemat listrik. Untuk itu, membiarkan kipas angin menyala, dan tidak hemat listrik. Untuk itu, dibutuhkanlah sebuah kipas angin yang mampu menyala dan mati, serta mengatur dibutuhkanlah sebuah kipas angin yang mampu menyala dan mati, serta mengatur kecepatan putar kipasnya secara otomatis agar mampu menangani masalah kecepatan putar kipasnya secara otomatis agar mampu menangani masalah pemborosan energi listrik tersebut.
pemborosan energi listrik tersebut.
1.2
1.2 Rumusan MasalahRumusan Masalah
Permasalahan yang dapat dirumuskan dari penelitian ini yaitu apakah Permasalahan yang dapat dirumuskan dari penelitian ini yaitu apakah kipas angin yang mampu menyala dan mati secara otomatis yang dirancang ini kipas angin yang mampu menyala dan mati secara otomatis yang dirancang ini mampu melakukan penghematan energi listrik?
mampu melakukan penghematan energi listrik?
1.3
1.3 Batasan MasalahBatasan Masalah
Pada penelitian ini permasalahan dibatasi pada hal-hal yang berkaitan Pada penelitian ini permasalahan dibatasi pada hal-hal yang berkaitan dengan teknik pengaktifan dan pengaturan kecepatan kipas angin otomatis, mulai dengan teknik pengaktifan dan pengaturan kecepatan kipas angin otomatis, mulai dari input,
dari input, proses, hingga outputnya.proses, hingga outputnya.
1.4
1.4 Tujuan PenelitianTujuan Penelitian
Tujuan penelitian ini adalah merancang sebuah kipas angin yang dapat Tujuan penelitian ini adalah merancang sebuah kipas angin yang dapat bekerja berdasarkan pada keberadaan manusia, dan mengatur kecepatan putar bekerja berdasarkan pada keberadaan manusia, dan mengatur kecepatan putar kipasnya berdasarkan pada pengukuran suhu r
1.5
1.5 Metode PenelitianMetode Penelitian
Metode penelitian yang digunakan dalam penelitian ini dibagi menjadi Metode penelitian yang digunakan dalam penelitian ini dibagi menjadi beberapa tahap, yaitu:
beberapa tahap, yaitu: 1.
1. Tahap pertama: Merencanakan penelitian dengan cara menentukanTahap pertama: Merencanakan penelitian dengan cara menentukan permasalahan apa yang akan dipecahkan dalam penelitian ini, serta permasalahan apa yang akan dipecahkan dalam penelitian ini, serta merencan
merencanakan solusi dakan solusi dari permasalahan tersebut.ari permasalahan tersebut. 2.
2. Tahap kedua: Merencanakan kebutuhan penelitian, berupa pengumpulanTahap kedua: Merencanakan kebutuhan penelitian, berupa pengumpulan informasi dan literatur yang berkaitan dengan penelitian, serta informasi dan literatur yang berkaitan dengan penelitian, serta komponen-komponen yang diperlukan dalam penelitian.
komponen yang diperlukan dalam penelitian. 3.
3. Tahap ketiga: Membuat alat dengan cara mendesain bentuk alat tersebut,Tahap ketiga: Membuat alat dengan cara mendesain bentuk alat tersebut, menyusun komponen-komponen yang dibutuhkan dan menanamkan menyusun komponen-komponen yang dibutuhkan dan menanamkan program ke dalamnya.
program ke dalamnya. 4.
4. Tahap keempat: Menguji alat untuk mengetahui apakah alat bekerja sesuaiTahap keempat: Menguji alat untuk mengetahui apakah alat bekerja sesuai yang direncanakan, dan membandingkan hasil uji tersebut dengan logika yang direncanakan, dan membandingkan hasil uji tersebut dengan logika pemrogramannya. Lalu, menguji coba kipas angin otomastis ini dengan pemrogramannya. Lalu, menguji coba kipas angin otomastis ini dengan kipas angin konvensional untuk membandingkan penggunaan energi kipas angin konvensional untuk membandingkan penggunaan energi listriknya.
listriknya. 5.
5. Tahap kelima: Menganalisa hasil uji coba kinerja alat dari nilai kesalahanTahap kelima: Menganalisa hasil uji coba kinerja alat dari nilai kesalahan rata-rata alat.
rata-rata alat. 6.
6. Tahap keenam: Menarik kesimpulan dari penelitian ini berdasarkan hasilTahap keenam: Menarik kesimpulan dari penelitian ini berdasarkan hasil analisa penelitian.
analisa penelitian.
1.6
1.6 Sistematika PenulisanSistematika Penulisan
Pembuatan tulisan mengenai penelitian ini dilakukan dengan membagi Pembuatan tulisan mengenai penelitian ini dilakukan dengan membagi penulisan menjadi beberapa bab, yaitu sebagai berikut:
penulisan menjadi beberapa bab, yaitu sebagai berikut: BAB I Pendahuluan
BAB I Pendahuluan
Pada bab ini, berisi tentang Latar Belakang Masalah, Batasan Masalah, Pada bab ini, berisi tentang Latar Belakang Masalah, Batasan Masalah, Tujuan Penelitian, Metode P
BAB II Tinjauan Pustaka BAB II Tinjauan Pustaka
Bab ini membahas tentang teori dasar dan komponen-komponen utama Bab ini membahas tentang teori dasar dan komponen-komponen utama yang diterapkan pada alat beserta analisanya.
yang diterapkan pada alat beserta analisanya. BAB III Analisa dan Cara Kerja Rangkaian
BAB III Analisa dan Cara Kerja Rangkaian
Berisi tentang analisa Perangkat keras dan Perangkat lunak, cara kerja dari Berisi tentang analisa Perangkat keras dan Perangkat lunak, cara kerja dari prototipe tersebut, blok diagram, flowchart program, dan truth table IC prototipe tersebut, blok diagram, flowchart program, dan truth table IC logika.
logika.
BAB IV Pengoperasian dan Pengujian BAB IV Pengoperasian dan Pengujian
Berisi tentang cara pengoperasian dan pengujian pengaplikasian kipas Berisi tentang cara pengoperasian dan pengujian pengaplikasian kipas angin otomatis ini pada kehidupan nyata beserta listing program yang angin otomatis ini pada kehidupan nyata beserta listing program yang ditanamkan di alat ini.
ditanamkan di alat ini. BAB V Penutup
BAB V Penutup
Membahas tentang kesimpulan dari penjelasan alat yang dibuat serta Membahas tentang kesimpulan dari penjelasan alat yang dibuat serta saran-saran dari
5 5
Dalam pembuatan kipas angin otomatis ini, terdapat beberapa teori-teori Dalam pembuatan kipas angin otomatis ini, terdapat beberapa teori-teori dasar. Teori-teori tersebut meliputi komponen utama alat dan software-nya. dasar. Teori-teori tersebut meliputi komponen utama alat dan software-nya. Komponen utama alat ini terdiri dari mikrokontroler ATMEGA8535, motor DC, Komponen utama alat ini terdiri dari mikrokontroler ATMEGA8535, motor DC, sensor PIR,
sensor PIR, senssensor or LM35, serta LM35, serta software-nysoftware-nya berupa a berupa pemrogrampemrograman an bahasa C.bahasa C.
2.1
2.1 Mikrokontroler ATMEGA8535 Mikrokontroler ATMEGA8535 sebagai sebagai ProsessorProsessor
Mikrokontroler AVR ATMEGA8535 merupakan mikrokontroler yang Mikrokontroler AVR ATMEGA8535 merupakan mikrokontroler yang memiliki arsitektur RISC 8 bit,
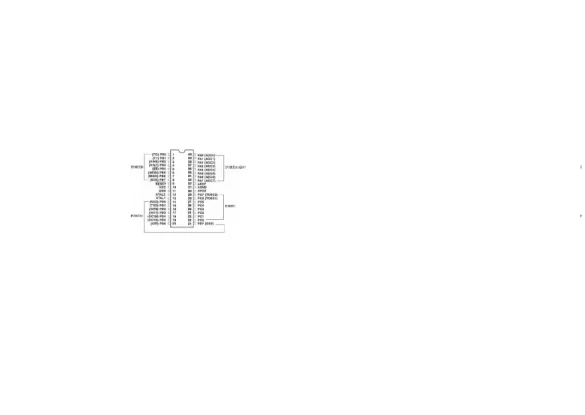
memiliki arsitektur RISC 8 bit, yaiyaitu sebuahtu sebuah arsitektur komputer darsitektur komputer dengan instruksi-engan instruksi-instruksi dan jenis eksekusi yang paling sederhana. Pada mikrokontroler instruksi dan jenis eksekusi yang paling sederhana. Pada mikrokontroler ATMEGA8535, semua instruksi dikemas dalam kode 16 bit dan sebagian besar ATMEGA8535, semua instruksi dikemas dalam kode 16 bit dan sebagian besar instruksi dieksekusi dalam 1 (satu) siklus clock. Berikut ini adalah gambar instruksi dieksekusi dalam 1 (satu) siklus clock. Berikut ini adalah gambar skematik mikrokontroler
skematik mikrokontroler ATMEGA8535ATMEGA8535..
Gambar 2.1 Skematik mikrokontroler ATMega8535 Gambar 2.1 Skematik mikrokontroler ATMega8535
Sumber: Sumber:
http://students.ukdw.a
http://students.ukdw.ac.id/~robotic/Traininc.id/~robotic/Training%20Microcontroller%2g%20Microcontroller%20For%20Begi0For%20Begi nner%20(B.%20Arifianto).pdf
nner%20(B.%20Arifianto).pdf
Deskripsi dari pin-pin ATMega8535 seperti yang tertera pada gambar 2.1 Deskripsi dari pin-pin ATMega8535 seperti yang tertera pada gambar 2.1 adalah sebagai berikut :
adalah sebagai berikut : 1.
1. VCC (pin 10) VCC (pin 10) : masukan tegangan di: masukan tegangan digital.gital. 2.
2. GND (pin 11) : GroGND (pin 11) : Groundund 3.
3. PORT A (pin 33 sampai 40): Port A sebagai input analog ke Analog toPORT A (pin 33 sampai 40): Port A sebagai input analog ke Analog to Digital konverter. Port A juga sebagai 8-bit bi-directional port I/O, jika Digital konverter. Port A juga sebagai 8-bit bi-directional port I/O, jika Analog to Digital konverter tidak digunakan. Pin-pin port dapat Analog to Digital konverter tidak digunakan. Pin-pin port dapat menyediakan resistor-resistor internal pull-up. Ketika port A digunakan menyediakan resistor-resistor internal pull-up. Ketika port A digunakan sebagai input dan pull eksternal yang rendah akan menjadi sumber arus sebagai input dan pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port A adalah tri-state jika resistor-resistor pull-up diaktifkan. Pin-pin port A adalah tri-state
ketika kondisi reset menjadi aktif sekalipun clock tidak akt ketika kondisi reset menjadi aktif sekalipun clock tidak akt if.if. 4.
4. PORT B (pin 1 sampai 8): Port B adalah port I/O 8-bit bi-directionalPORT B (pin 1 sampai 8): Port B adalah port I/O 8-bit bi-directional dengan resistor-resistor internal pull-up. Buffer output port B mempunyai dengan resistor-resistor internal pull-up. Buffer output port B mempunyai karaketristik drive yang simetris dengan kemampuan keduanya sink dan karaketristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port B yang mempunyai pull eksternal source yang tinggi. Sebagai input, port B yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port B adalah tri-state ketika kondisi reset menjadi diaktifkan. Pin-pin port B adalah tri-state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif.
aktif sekalipun clock tidak aktif. 5.
5. PORT C (pin 22 sampai 29): Port C adalah port I/O 8-bit bi-directionalPORT C (pin 22 sampai 29): Port C adalah port I/O 8-bit bi-directional dengan resistor-resistor internal pull-up. Buffer output port C mempunyai dengan resistor-resistor internal pull-up. Buffer output port C mempunyai karaketristik drive yang simetris dengan kemampuan keduanya sink dan karaketristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port C yang mempunyai pull eksternal source yang tinggi. Sebagai input, port C yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port C adalah tri-state ketika kondisi reset menjadi diaktifkan. Pin-pin port C adalah tri-state ketika kondisi reset menjadi aktif seklipun clock tidak aktif. Jika antarmuka JTAG enable, aktif seklipun clock tidak aktif. Jika antarmuka JTAG enable, resistor-resistor pull-up pada pin-pin PC5 (TDI), PC3 (TMS), PC2 (TCK) akan resistor pull-up pada pin-pin PC5 (TDI), PC3 (TMS), PC2 (TCK) akan diaktifkan sekalipun terjadi reset.
6.
6. PORT D (pin 14 sampai 21): Port D adalah port I/O 8-bit bi-directionalPORT D (pin 14 sampai 21): Port D adalah port I/O 8-bit bi-directional dengan resistor-resistor internal pull-up. Buffer output port D mempunyai dengan resistor-resistor internal pull-up. Buffer output port D mempunyai karaketristik drive yang simetris dengan kemampuan keduanya sink dan karaketristik drive yang simetris dengan kemampuan keduanya sink dan source yang tinggi. Sebagai input, port D yang mempunyai pull eksternal source yang tinggi. Sebagai input, port D yang mempunyai pull eksternal yang rendah akan menjadi sumber arus jika resistor-resistor pull-up yang rendah akan menjadi sumber arus jika resistor-resistor pull-up diaktifkan. Pin-pin port D adalah tri-state ketika kondisi reset menjadi diaktifkan. Pin-pin port D adalah tri-state ketika kondisi reset menjadi aktif sekalipun clock tidak aktif.
aktif sekalipun clock tidak aktif. 7.
7. Reset (pin 9): Merupakan pin reset yang akan bekerja bila diberi pulsaReset (pin 9): Merupakan pin reset yang akan bekerja bila diberi pulsa rendah (aktif low) selama minimal 1.5 us.
rendah (aktif low) selama minimal 1.5 us. 8.
8. XTAL2 (pin 12): Merupakan output dari penguat oscillator XTAL2 (pin 12): Merupakan output dari penguat oscillator pembalikpembalik.. 9.
9. XTAL1 (pin 13): Merupakan input ke penguat oscillator pembalik danXTAL1 (pin 13): Merupakan input ke penguat oscillator pembalik dan input ke eksternal clock.
input ke eksternal clock. 10.
10. AVCC AVCC (pin 30(pin 30): ): Merupakan catMerupakan catu dau daya yang diguya yang digunakan unakan untuk masukantuk masukann analog ADC yang terhubung ke PORTA.
analog ADC yang terhubung ke PORTA. 11.
11. AREF (pin 32): AREF (pin 32): Merupakan tegangMerupakan tegangan referensi analog untuk ADC.an referensi analog untuk ADC. Detail spesfikasi ATMega8535 adalah sebagai berikut:
Detail spesfikasi ATMega8535 adalah sebagai berikut: 1)
1) Saluran I/O sebanyak 32 buah, yaitu port A, Port B, Port CSaluran I/O sebanyak 32 buah, yaitu port A, Port B, Port C , dan Port D., dan Port D. 2)
2) ADC 10 bit sebanyak 8 saluran.ADC 10 bit sebanyak 8 saluran. 3)
3) Tiga buah TTiga buah Timer/Counter dengan kemampuan pembandinganimer/Counter dengan kemampuan pembandingan.. 4)
4) CPU yang terdiri atas 32 buah register.CPU yang terdiri atas 32 buah register. 5)
5) Watchdog Timer dengan Osilator Watchdog Timer dengan Osilator InternalInternal.. 6)
6) SRAM sebanyak 512 byte.SRAM sebanyak 512 byte. 7)
7) Memori Flash sebesar 8 kb dengan kemampuan Read While WrMemori Flash sebesar 8 kb dengan kemampuan Read While Write.ite. 8)
8) Unit Interupsi Unit Interupsi internal dan eksternal.internal dan eksternal. 9)
9) Port antarmuka SPI.Port antarmuka SPI. 10)
10) EEPROM sebesar 512 byte yang dapat diprogram saat operasi.EEPROM sebesar 512 byte yang dapat diprogram saat operasi. 11)
11) Antarmuka komparator Antarmuka komparator analanalog.og. 12)
Mikrokontroler ATMEGA8535 memiliki fitur pengkonversi sinyal analog Mikrokontroler ATMEGA8535 memiliki fitur pengkonversi sinyal analog menjadi sinyal digital yang disebut Analog to Digital Converter (ADC). menjadi sinyal digital yang disebut Analog to Digital Converter (ADC). Penjelasan tentang ADC pada ATMEGA8535 akan
Penjelasan tentang ADC pada ATMEGA8535 akan dibahas sebagai berikut.dibahas sebagai berikut. 2.1.1
2.1.1 Analog Analog to to Digital Digital ConverterConverter
Analog to Digital Converter adalah fitur paling populer dari ATmega Analog to Digital Converter adalah fitur paling populer dari ATmega 8535. Dengan adanya fitur ini kita tidak perlu menggunakan ADC0804 untuk 8535. Dengan adanya fitur ini kita tidak perlu menggunakan ADC0804 untuk membaca sinyal analog. ATmega8535 memiliki 8 channel input ADC, dan hasil membaca sinyal analog. ATmega8535 memiliki 8 channel input ADC, dan hasil pembacaan ADC-nya beresolusi maksimum 10 bit.
pembacaan ADC-nya beresolusi maksimum 10 bit. Adapun fitur dari
Adapun fitur dari ADC ATMega8535 adalah sebagADC ATMega8535 adalah sebagai berikut:ai berikut:
·
· Resolusi 10 bit.Resolusi 10 bit. ·
· Waktu konversi 65-260 us.Waktu konversi 65-260 us. ·
· 0 - Vcc range input ADC.0 - Vcc range input ADC. ·
· Memiliki 8 channel input.Memiliki 8 channel input. ·
· Tiga mode Tiga mode pemilihan tegangan referensi.pemilihan tegangan referensi.
Mode operasi ADC terbagi menjadi 2
Mode operasi ADC terbagi menjadi 2 yaitu sebagai berikut:yaitu sebagai berikut: A.
A. Mode KonverMode Konversi Tunggal si Tunggal (Single Conversion(Single Conversion))
Dalam mode ini, konversi dilakukan untuk sekali pembacaan sampel Dalam mode ini, konversi dilakukan untuk sekali pembacaan sampel tegangan input. Konversi dimulai ketika bit ADSC di-set dan bit ini tetap set tegangan input. Konversi dimulai ketika bit ADSC di-set dan bit ini tetap set sampai satu kali konversi selesai, setelah itu bit ini otomatis di clear CPU.
sampai satu kali konversi selesai, setelah itu bit ini otomatis di clear CPU. B.
B. Mode KoMode Konversi nversi Kontinu (FrKontinu (Free Running)ee Running)
Dalam mode ini, konversi dilakukan secara terus
Dalam mode ini, konversi dilakukan secara terus menemenerus (ADC rus (ADC membacamembaca sampel tegangan input lalu dikonversi dan hasilnya ditampung di register ADCH sampel tegangan input lalu dikonversi dan hasilnya ditampung di register ADCH dan ADCL secara terus menerus)
dan ADCL secara terus menerus) Berikut adalah daftar register
1.
1. Register ADMUXRegister ADMUX
Register ADMUX (ADC Multiplexer Selection Register) Register ADMUX (ADC Multiplexer Selection Register) digunakan untuk menentukan tegangan referensi dari ADC, menentukan digunakan untuk menentukan tegangan referensi dari ADC, menentukan format data hasil konversi ADC, menentukan channel ADC yang akan format data hasil konversi ADC, menentukan channel ADC yang akan digunakan. Tabel 2.1 berikut ini akan memaparkan isi dari register digunakan. Tabel 2.1 berikut ini akan memaparkan isi dari register ADMUX:
ADMUX:
Tabel 2.1 Daftar bit register ADMUX Tabel 2.1 Daftar bit register ADMUX Bit
Bit 7 7 Bit Bit 6 6 Bit Bit 5 5 Bit Bit 4 4 Bit Bit 3 3 Bit 2 Bit 2 Bit Bit 1 1 Bit Bit 00 REFS1
REFS1 REFS0REFS0 ADLARADLAR -- MUX3MUX3 MUX2MUX2 MUX1MUX1 MUX0MUX0
Penjelasan mengenai tabel 2.1 di atas a
Penjelasan mengenai tabel 2.1 di atas adalah sebagai beridalah sebagai berikut:kut:
·
· Bit 7 (REFS1) dan bit 6 (REFS0) Reference Selection Bits digunakanBit 7 (REFS1) dan bit 6 (REFS0) Reference Selection Bits digunakan
untuk menentukan tegangan referensi ADC. Penjelasan mengenai untuk menentukan tegangan referensi ADC. Penjelasan mengenai konfigurasi bit 7 & 6 register ADMUX dapat dilihat pada tabel 2.2.
konfigurasi bit 7 & 6 register ADMUX dapat dilihat pada tabel 2.2. Tabel 2.2 Konfigurasi bit 6 & 7
Tabel 2.2 Konfigurasi bit 6 & 7 register ADMUXregister ADMUX Bit
Bit 7 7 Bit Bit 6 6 Tegangan Tegangan ReferensiReferensi 0
0 0 0 Pin Pin AREF, AREF, internal internal Vref Vref didi matikan (off)
matikan (off) 0
0 1 1 Pin Pin AVCC, AVCC, dengan dengan kapasitorkapasitor eksternal pada
eksternal pada pin pinAREFAREF 1
1 0 0 Tidak Tidak digunakandigunakan
1
1 11
Tegangan referensi internal 2,56 V Tegangan referensi internal 2,56 V dengan kapasitor eksternal
dengan kapasitor eksternal pada pin
pada pin AREFAREF
·
Bit ini digunakan untuk menentukan format data hasil konversi. Isi bit ini Bit ini digunakan untuk menentukan format data hasil konversi. Isi bit ini dengan 1 (ADLAR=1) jika menggunakan resolusi 8 bit.
dengan 1 (ADLAR=1) jika menggunakan resolusi 8 bit.
·
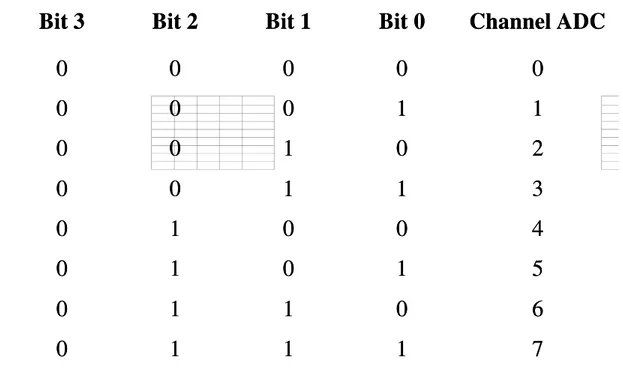
· Bit 3, 2, 1 dan 0 - MUX3, MUX2, MUX1 dan MUX0 (Analog ChannelBit 3, 2, 1 dan 0 - MUX3, MUX2, MUX1 dan MUX0 (Analog Channel
Selection Bits) Selection Bits)
Keempat bit ini digunakan untuk menentukan channel ADC. Berikut ini Keempat bit ini digunakan untuk menentukan channel ADC. Berikut ini adalah tabel yang berisi konfigurasi channel ADC.
adalah tabel yang berisi konfigurasi channel ADC. Tabel 2.3 Konfigurasi channel Tabel 2.3 Konfigurasi channel ADCADC Bit
Bit 3 3 Bit Bit 2 2 Bit Bit 1 1 Bit Bit 0 0 Channel Channel ADCADC 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 1 1 11 0 0 0 0 1 1 0 0 22 0 0 0 0 1 1 1 1 33 0 0 1 1 0 0 0 0 44 0 0 1 1 0 0 1 1 55 0 0 1 1 1 1 0 0 66 0 0 1 1 1 1 1 1 77 2.
2. RegisterRegister ADCSRAADCSRA
R
Reeggiisstteer r AADDCCSSRRA A ((AADDC C CCoonnttrrool l aannd d SSttaattuus s RReeggiisstteer r AA)) digunakan untuk menentukan waktu kapan harus mulai mengaktifkan digunakan untuk menentukan waktu kapan harus mulai mengaktifkan fungsi analog to digital converter. Tabel 2.4 berikut ini akan memaparkan fungsi analog to digital converter. Tabel 2.4 berikut ini akan memaparkan isi dari register ADCSRA.
isi dari register ADCSRA.
Tabel 2.4 Daftar bit register ADCSRA Tabel 2.4 Daftar bit register ADCSRA Bit
Bit 7 7 Bit Bit 6 6 Bit Bit 5 5 Bit Bit 4 4 Bit Bit 3 3 Bit Bit 2 2 Bit Bit 1 1 Bit Bit 00 ADEN
·
· Bit 7 – Bit 7 – ADEN (ADC Enable)ADEN (ADC Enable)
Bit ini digunakan untuk mengaktifkan ADC, bernilai awal 0, jika bernilai Bit ini digunakan untuk mengaktifkan ADC, bernilai awal 0, jika bernilai 1 maka ADC aktif.
1 maka ADC aktif.
·
· Bit 6 – Bit 6 – ADSC (ADC Start Conversion)ADSC (ADC Start Conversion)
Penge-set-an bit ini membuat ADC memulai konversi sinyal masukan. Penge-set-an bit ini membuat ADC memulai konversi sinyal masukan. Ketika konversi
Ketika konversi telah selesaitelah selesai, maka otomatis bi, maka otomatis bit ini di-clear.t ini di-clear.
·
· Bit 5 – ADATE (ADC Auto Trigger Enable)Bit 5 – ADATE (ADC Auto Trigger Enable)
Bit i
Bit ini ni digunakan digunakan untuk untuk mengatur mengatur sumber sumber pemicu pemicu terjadinya terjadinya konversikonversi ADC. Jika bit ini di set maka akan mengaktifkan auto triggering register ADC. Jika bit ini di set maka akan mengaktifkan auto triggering register SFIOR dan menggunakan mode free running.
SFIOR dan menggunakan mode free running.
·
· Bit 4 – ADIF (ADC Interupt Flag)Bit 4 – ADIF (ADC Interupt Flag)
Bit ini set ketika konversi ADC telah selesai dan Data Register telah Bit ini set ketika konversi ADC telah selesai dan Data Register telah ter-updated. Bit ini otomatis di-clear ketika eksekusi interupsi ADC updated. Bit ini otomatis di-clear ketika eksekusi interupsi ADC conversi
conversion on complete.complete.
·
· Bit 3 – Bit 3 – ADIE (ADC Interupt Enable)ADIE (ADC Interupt Enable)
Bit ini digunakan untuk mengaktifkan interupsi ADC Conversion Bit ini digunakan untuk mengaktifkan interupsi ADC Conversion Complete.
Complete. Bernilai awal Bernilai awal 0. Jika di0. Jika di-set dan konv-set dan konversi ADC telah ersi ADC telah selesai,selesai, maka
maka sebuah interupsi akasebuah interupsi akan dieksekusi sesun dieksekusi sesuai dengan jenis inai dengan jenis interupsi yangterupsi yang ditulis di pro
ditulis di programgram..
·
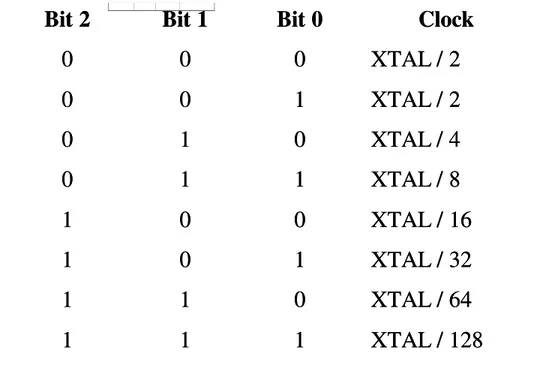
· Bit 2, 1 Bit 2, 1 dan 0 – ADPS2, ADPS1 dan ADPS0 (ADC Prescaler Select Bit)dan 0 – ADPS2, ADPS1 dan ADPS0 (ADC Prescaler Select Bit)
Ketiga bit ini digunakan untuk menentukan faktor pembagi frekuensi Ketiga bit ini digunakan untuk menentukan faktor pembagi frekuensi clock CPU yang akan digunakan. Detail konfigurasinya dapat dilihat pada clock CPU yang akan digunakan. Detail konfigurasinya dapat dilihat pada tabet 2.5 berikut ini.
Tabel 2.5 Konfigurasi faktor pembagi frekuensi clock Tabel 2.5 Konfigurasi faktor pembagi frekuensi clock CPUCPU
Bit
Bit 2 2 Bit Bit 1 1 Bit Bit 0 0 ClockClock 0 0 0 0 0 0 XTAL XTAL / / 22 0 0 0 0 1 1 XTAL XTAL / / 22 0 0 1 1 0 0 XTAL XTAL / / 44 0 0 1 1 1 1 XTAL XTAL / / 88 1 1 0 0 0 0 XTAL XTAL / / 1616 1 1 0 0 1 1 XTAL XTAL / / 3232 1 1 1 1 0 0 XTAL XTAL / / 6464 1 1 1 1 1 1 XTAL XTAL / / 128128 3.
3. Register SFIORRegister SFIOR
Register SFIOR (Special Function Input Output Register) Register SFIOR (Special Function Input Output Register) merupakan register 8 bit pengatur sumber picu konversi ADC, apakah dari merupakan register 8 bit pengatur sumber picu konversi ADC, apakah dari picu internal atau dari picu eksternal. untuk operasi ADC, bit picu internal atau dari picu eksternal. untuk operasi ADC, bit ACME,PUD,PSR2 dan PSR10 tidak dipakai. Susunan register SFIOR ACME,PUD,PSR2 dan PSR10 tidak dipakai. Susunan register SFIOR dapat dilihat pada tabel 2.6 sebagai berikut :
dapat dilihat pada tabel 2.6 sebagai berikut : Tabel 2.6 Daftar bit register S
Tabel 2.6 Daftar bit register SFIORFIOR Bit
Bit 7 7 Bit Bit 6 6 Bit Bit 5 5 Bit Bit 4 4 Bit Bit 3 3 Bit Bit 2 2 Bit Bit 1 1 Bit Bit 00 ADTS2
ADTS2 ADTS1ADTS1 ADTS0ADTS0 -- ACMEACME PUDPUD PSR2PSR2 PSR10PSR10
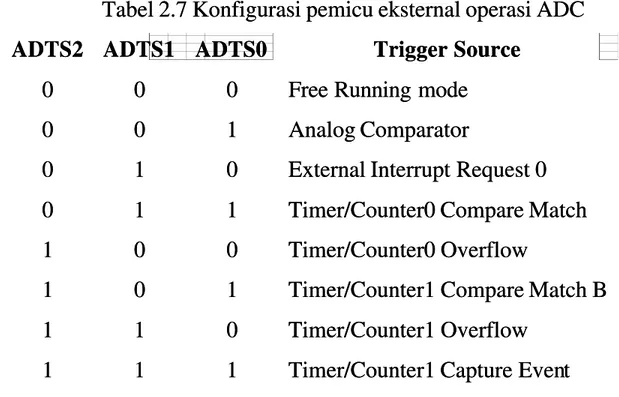
ADTS2, ADTS1 dan ADTS merupakan bit pengatur picu eksternal ADTS2, ADTS1 dan ADTS merupakan bit pengatur picu eksternal operasi ADC. Hanya berfungsi jika bit ADATE pada register ADCSRA operasi ADC. Hanya berfungsi jika bit ADATE pada register ADCSRA bernilai 1. Bernilai awal 000 sehingga ADC bekerja pada Free Running bernilai 1. Bernilai awal 000 sehingga ADC bekerja pada Free Running dan tidak ada interupsi yang dihasilkan. Detail konfigurasinya dapat dilihat dan tidak ada interupsi yang dihasilkan. Detail konfigurasinya dapat dilihat pada tabet 2.7 berikut ini.
Tabel 2.7 Konfigurasi pemicu eksternal operasi ADC Tabel 2.7 Konfigurasi pemicu eksternal operasi ADC ADTS2
ADTS2 ADTS1 ADTS1 ADTS0 ADTS0 Trigger Trigger SourceSource 0
0 0 0 0 0 Free Free Running Running modemode 0
0 0 0 1 1 Analog Analog ComparatorComparator 0
0 1 1 0 0 External External Interrupt Interrupt Request Request 00 0
0 1 1 1 1 Timer/Counter0 Timer/Counter0 Compare Compare MatchMatch 1
1 0 0 0 0 Timer/Counter0 Timer/Counter0 OverflowOverflow 1
1 0 0 1 1 Timer/Counter1 Timer/Counter1 Compare Compare Match Match BB 1
1 1 1 0 0 Timer/Counter1 Timer/Counter1 OverflowOverflow 1
1 1 1 1 1 Timer/Counter1 Timer/Counter1 Capture Capture EvenEventt
2.2
2.2 Motor DC Motor DC sebagai sebagai Penggerak Penggerak Kipas Kipas AnginAngin Motor DC, pada
Motor DC, pada alat ini, digunakan sebagai penggerak kipas angin. Motoralat ini, digunakan sebagai penggerak kipas angin. Motor DC adalah motor yang memerlukan suplai tegangan searah pada kumparan DC adalah motor yang memerlukan suplai tegangan searah pada kumparan jangkar dan kumparan medan untuk diubah menjadi energi mekanik. Motor DC jangkar dan kumparan medan untuk diubah menjadi energi mekanik. Motor DC terdapat dalam berbagai ukuran dan kekuatan, masing masing didesain untuk terdapat dalam berbagai ukuran dan kekuatan, masing masing didesain untuk keperluan yang berbeda-beda namun secara umum memiliki fungsi dasar yang keperluan yang berbeda-beda namun secara umum memiliki fungsi dasar yang sama yaitu mengubah energi elektrik menjadi energi mekanik.
sama yaitu mengubah energi elektrik menjadi energi mekanik.
Sebuah motor DC sederhana dibangun dengan menempatkan kawat yang Sebuah motor DC sederhana dibangun dengan menempatkan kawat yang dialiri arus di dalam medan magnet. Kawat yang membentuk loop ditempatkan dialiri arus di dalam medan magnet. Kawat yang membentuk loop ditempatkan sedemikian rupa di antara dua buah magnet permanen. Bila arus mengalir pada sedemikian rupa di antara dua buah magnet permanen. Bila arus mengalir pada kawat, arus akan
kawat, arus akan menghasilkan medan magnet sendiri yang arahnya berubah-ubahmenghasilkan medan magnet sendiri yang arahnya berubah-ubah terhadap arah medan magnet permanen sehingga menimbulkan putaran. terhadap arah medan magnet permanen sehingga menimbulkan putaran. Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Terdapat 2 cara untuk mengatur tingkat mempengaruhi kualitas pasokan daya. Terdapat 2 cara untuk mengatur tingkat kecepatan putar motor DC, yaitu dengan meningkatkan tegangan dinamo maka kecepatan putar motor DC, yaitu dengan meningkatkan tegangan dinamo maka kecepatan putar kipas akan meningkat, dan dengan menurunkan arus medan maka kecepatan putar kipas akan meningkat, dan dengan menurunkan arus medan maka akan kecepatan putar kipas. Berikut ini adalah gambar 2.2 tentang struktur motor akan kecepatan putar kipas. Berikut ini adalah gambar 2.2 tentang struktur motor DC.
Gambar 2.2 Struktur motor DC Gambar 2.2 Struktur motor DC
Sumber:
Sumber: http://pictureofgoodelectroniccircuit.blhttp://pictureofgoodelectroniccircuit.blogspot.com/2011/02/dcogspot.com/2011/02/dc-motor-
-motor-which-has-three-main.html which-has-three-main.html
Berdasarkan struktur motor DC pada gambar 2.2, sebuah motor DC yang Berdasarkan struktur motor DC pada gambar 2.2, sebuah motor DC yang memiliki t
memiliki tiga komponen utama:iga komponen utama: 1.
1. Kutub medanKutub medan
Secara sederhana digambarkan bahwa interaksi dua kutub magnet akan Secara sederhana digambarkan bahwa interaksi dua kutub magnet akan menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang menyebabkan perputaran pada motor DC. Motor DC memiliki kutub medan yang stasioner dan dinamo yang menggerakan bearing pada ruang diantara kutub stasioner dan dinamo yang menggerakan bearing pada ruang diantara kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub medan. Motor DC sederhana memiliki dua kutub medan: kutub utara dan kutub selatan. Garis magnetik energi membesar melintasi bukaan diantara kutub-kutub selatan. Garis magnetik energi membesar melintasi bukaan diantara kutub-kutub dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat dari utara ke selatan. Untuk motor yang lebih besar atau lebih komplek terdapat satu atau lebih elektromagnet. Elektromagnet menerima listrik dari sumber daya satu atau lebih elektromagnet. Elektromagnet menerima listrik dari sumber daya dari luar sebagai penyedia str
dari luar sebagai penyedia struktur medan.uktur medan. 2.
2. DinamoDinamo
Bila arus masuk menuju dinamo, maka arus ini akan menjadi Bila arus masuk menuju dinamo, maka arus ini akan menjadi elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke as penggerak elektromagnet. Dinamo yang berbentuk silinder, dihubungkan ke as penggerak untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar untuk menggerakan beban. Untuk kasus motor DC yang kecil, dinamo berputar dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan dalam medan magnet yang dibentuk oleh kutub-kutub, sampai kutub utara dan
selatan magnet berganti lokasi. Jika hal ini terjadi
selatan magnet berganti lokasi. Jika hal ini terjadi arusnyarusnya berbalik untuk merubaha berbalik untuk merubah kutub-kutub utara dan selatan
kutub-kutub utara dan selatan dinamdinamo.o. 3.
3. CommutatorCommutator
Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah Komponen ini terutama ditemukan dalam motor DC. Kegunaannya adalah untuk membalikan arah arus listrik dalam dinamo. Commutator juga membantu untuk membalikan arah arus listrik dalam dinamo. Commutator juga membantu dalam transmisi arus antara dinamo dan sumber daya.
dalam transmisi arus antara dinamo dan sumber daya. Rumus untuk menghitung besarny
Rumus untuk menghitung besarnya RPM a RPM (Rotation per Minute ) (Rotation per Minute ) atauatau banyaknya putaran per menit adalah sebagai berikut :
banyaknya putaran per menit adalah sebagai berikut :
R
RP
PM
M Ma
Max
x
=
=
120
120
∗∗
F
F
P
P
Keterangan: Keterangan:RPM Max = Nilai maksimal dari RPM (RPM) RPM Max = Nilai maksimal dari RPM (RPM) F = Frekuensi jala-jala (Hz)
F = Frekuensi jala-jala (Hz)
P = Jumlah kutub pada motor DC P = Jumlah kutub pada motor DC
2.3
2.3 IC L293 IC L293 sebagai sebagai Motor Motor DriverDriver
IC L293D ini adalah suatu bentuk rangkaian daya tinggi terintegrasi yang IC L293D ini adalah suatu bentuk rangkaian daya tinggi terintegrasi yang mampu melayani 4 buah beban dengan arus nominal 600 mA hingga maksimum mampu melayani 4 buah beban dengan arus nominal 600 mA hingga maksimum 1.2 A. Keempat channel inputnya didesain untuk dapat menerima masukan level 1.2 A. Keempat channel inputnya didesain untuk dapat menerima masukan level logika TTL. Biasa dipakai sebagai driver relay, motor DC, motor steper maupun logika TTL. Biasa dipakai sebagai driver relay, motor DC, motor steper maupun pengganti transistor sebagai saklar dengan kecepatan switching mencapai 5kHz. pengganti transistor sebagai saklar dengan kecepatan switching mencapai 5kHz. Driver tersebut berupa dua pasang rangkaian h-bridge yang masing-masing Driver tersebut berupa dua pasang rangkaian h-bridge yang masing-masing dikendalikan oleh enable 1 dan enable 2.
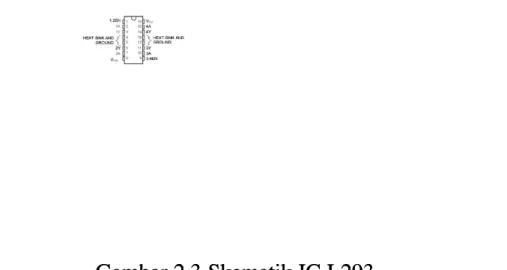
Gambar 2.3 Skematik IC L293 Gambar 2.3 Skematik IC L293
Berdasarkan pada gambar 2.3, konfigurasi pin-pin pada IC L293 adalah Berdasarkan pada gambar 2.3, konfigurasi pin-pin pada IC L293 adalah sebagai berikut
sebagai berikut 1)
1) 1,2 EN / Enable 1 (P1,2 EN / Enable 1 (Pin 1): Enable 1 berfungsi sebagai pengin 1): Enable 1 berfungsi sebagai pengaktif masukan 1aktif masukan 1 (1A) dan masukan 2 (2A). Enable 1 diaktifkan dengan cara diberi (1A) dan masukan 2 (2A). Enable 1 diaktifkan dengan cara diberi tegangan 5 Volt.
tegangan 5 Volt. 2)
2) 3,4 EN / Enable 2 (P3,4 EN / Enable 2 (Pin 9): Enable 2 berfungsi sebagai pengin 9): Enable 2 berfungsi sebagai pengaktif masukan 3aktif masukan 3 (3A) dan masukan 4 (4A). Enable 2 diaktifkan dengan cara diberi (3A) dan masukan 4 (4A). Enable 2 diaktifkan dengan cara diberi tegangan 5 Volt.
tegangan 5 Volt. 3)
3) 1A (pin 2): 1A (pin 2): 1A adalah masukan 1 untuk IC 1A adalah masukan 1 untuk IC L293, dan hanya bisa berfungsiL293, dan hanya bisa berfungsi jika enable 1 diaktifkan.
jika enable 1 diaktifkan. 4)
4) 1Y (pin 3): 1Y 1Y (pin 3): 1Y adalah keladalah keluaran dari masukan 1 untuk IC uaran dari masukan 1 untuk IC L293.L293. 5)
5) 2A (pin 7): 2A (pin 7): 1A adalah masukan 2 untuk IC 1A adalah masukan 2 untuk IC L293, dan hanya bisa berfungsiL293, dan hanya bisa berfungsi jika enable 1 diaktifkan.
jika enable 1 diaktifkan. 6)
6) 2Y (pin 6): 2Y 2Y (pin 6): 2Y adalah keladalah keluaran dari masukan 2 untuk IC uaran dari masukan 2 untuk IC L293.L293. 7)
7) 3A (pin 10): 3A adalah masukan 3 untuk IC L293, dan hanya bisa3A (pin 10): 3A adalah masukan 3 untuk IC L293, dan hanya bisa berfungsi jika enable 2 diaktifkan.
berfungsi jika enable 2 diaktifkan. 8)
8) 3Y (pin 11): 3Y adalah keluaran dari masukan 3 untuk IC L293.3Y (pin 11): 3Y adalah keluaran dari masukan 3 untuk IC L293. 9)
9) 4A (pin 15): 4A adalah masukan 4 untuk IC L293, dan hanya bisa4A (pin 15): 4A adalah masukan 4 untuk IC L293, dan hanya bisa berfungsi jika enable 2 diaktifkan.
berfungsi jika enable 2 diaktifkan. 10)
10) 4Y (pin 14): 4Y adalah keluaran dari masukan 4 untuk IC L293.4Y (pin 14): 4Y adalah keluaran dari masukan 4 untuk IC L293. 11)
11) Vcc1 (pin 16): Vcc1 berfungsi sebagai masukan tegangan sebesar 5 VoltVcc1 (pin 16): Vcc1 berfungsi sebagai masukan tegangan sebesar 5 Volt untuk IC L293.
12)
12) Vcc2 (pin 8): Vcc2 berfungsi sebagai masukan tegangan sebesar 12 VoltVcc2 (pin 8): Vcc2 berfungsi sebagai masukan tegangan sebesar 12 Volt untuk IC L293.
untuk IC L293. 13)
13) Ground (pin 4, 5, 12, & 13): Keempat pin ini berfungsi sebagai groundGround (pin 4, 5, 12, & 13): Keempat pin ini berfungsi sebagai ground untuk IC L293.
untuk IC L293.
Pada IC L293, pin Enable 1 atau 2 diberi VCC 5 Volt untuk kecepatan Pada IC L293, pin Enable 1 atau 2 diberi VCC 5 Volt untuk kecepatan penuh motor DC, dan untuk pengaturan kecepatan motor DC dapat dilakukan penuh motor DC, dan untuk pengaturan kecepatan motor DC dapat dilakukan dengan metode PWM (Pulse Width Modulation) untuk kecepatan rotasi yang dengan metode PWM (Pulse Width Modulation) untuk kecepatan rotasi yang bervariasi tergantung dari level highnya.
bervariasi tergantung dari level highnya. 2.3.1
2.3.1 Pulse Pulse Width Width ModulationModulation
Pulse Width Modulation (PWM) adalah metode yang cukup efektif untuk Pulse Width Modulation (PWM) adalah metode yang cukup efektif untuk mengendalikan kecepatan motor DC. PWM ini bekerja dengan cara membuat mengendalikan kecepatan motor DC. PWM ini bekerja dengan cara membuat gelombang persegi yang memiliki perbandingan pulsa high terhadap pulsa low gelombang persegi yang memiliki perbandingan pulsa high terhadap pulsa low yang telah tertentu, biasanya diskalakan dari 0 hingga 100%. Gelombang persegi yang telah tertentu, biasanya diskalakan dari 0 hingga 100%. Gelombang persegi ini memiliki frekuensi tetap (biasanya max 10 KHz) namun lebar pulsa high dan ini memiliki frekuensi tetap (biasanya max 10 KHz) namun lebar pulsa high dan low dalam 1 periode yang akan diatur. Perbandingan pulsa high terhadap low ini low dalam 1 periode yang akan diatur. Perbandingan pulsa high terhadap low ini akan menentukan jumlah daya yang diberikan ke motor
akan menentukan jumlah daya yang diberikan ke motor DC.DC.
Rumus untuk menentukan kecepatan putaran kipas yang dipengaruhi nilai Rumus untuk menentukan kecepatan putaran kipas yang dipengaruhi nilai PWM adalah sebagai berikut:
PWM adalah sebagai berikut:
RPM =
RPM =
R
RP
PM
M Ma
Max
x
∗ ∗
PWM
P
WM
255
255
Keterangan: Keterangan:RPM = Jumlah putaran per menit (RPM) RPM = Jumlah putaran per menit (RPM) RPM Max = Nilai maksimal dari RPM (RPM) RPM Max = Nilai maksimal dari RPM (RPM) PWM = Nilai PWM dengan nilai maksimal 255 PWM = Nilai PWM dengan nilai maksimal 255
2.3
2.3 Passive Infrared Passive Infrared Receiver Receiver sebagai sebagai Pendeteksi Pendeteksi ManusiaManusia
Passive Infrared Receiver (PIR) merupakan sebuah sensor berbasis Passive Infrared Receiver (PIR) merupakan sebuah sensor berbasis infrared. Akan tetapi, t
infrared. Akan tetapi, tidak seperti sensor infrared kebanyakan yang terdiri dari IRidak seperti sensor infrared kebanyakan yang terdiri dari IR LED dan fototransistor. PIR tidak memancarkan apapun seperti IR LED. Sesuai LED dan fototransistor. PIR tidak memancarkan apapun seperti IR LED. Sesuai dengan namanya ‘Passive’, sensor ini hanya merespon energi dari pancaran sinar dengan namanya ‘Passive’, sensor ini hanya merespon energi dari pancaran sinar inframerah pasif yang dimiliki o
inframerah pasif yang dimiliki oleh setiap objek bergerak yang terdeteksi olehnyleh setiap objek bergerak yang terdeteksi olehnya.a. Berikut ini adalah gambar 2.4 yang menerangkan tentang diagram rangkaian Berikut ini adalah gambar 2.4 yang menerangkan tentang diagram rangkaian sensor PIR.
sensor PIR.
Gambar 2.4 Rangkaian sensor PIR Gambar 2.4 Rangkaian sensor PIR Sumber:
Sumber: http://bagusrifqyalistia.wordpreshttp://bagusrifqyalistia.wordpress.com/2008/09/1s.com/2008/09/12/cara-kerja-sens2/cara-kerja-sensor-pir/ or-pir/
Pada gambar 2.4 terdapat rangkaian penyusun sensor PIR yang terdiri dari Pada gambar 2.4 terdapat rangkaian penyusun sensor PIR yang terdiri dari lensa Fresnel, IR filter,
lensa Fresnel, IR filter, pyroelectric sensor, amplifier, dan comparator. Sensor PIRpyroelectric sensor, amplifier, dan comparator. Sensor PIR hanya bereaksi pada tubuh
hanya bereaksi pada tubuh manusia saja disebabkan karena adanya IR Filter yangmanusia saja disebabkan karena adanya IR Filter yang menyaring panjang gelombang sinar inframerah pasif. IR Filter dimodul sensor menyaring panjang gelombang sinar inframerah pasif. IR Filter dimodul sensor PIR ini mampu menyaring panjang gelombang sinar inframerah pasif antara 8 PIR ini mampu menyaring panjang gelombang sinar inframerah pasif antara 8 sampai 14 mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh sampai 14 mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar antara 9 sampai 10 mikrometer ini saja yang dapat manusia yang berkisar antara 9 sampai 10 mikrometer ini saja yang dapat dideteksi oleh sensor. Jadi, ketika seseorang berjalan melewati sensor,
dideteksi oleh sensor. Jadi, ketika seseorang berjalan melewati sensor, senssensor or akanakan menangk
yang memiliki suhu yang berbeda dari lingkungan. Pancaran sinar inframerah yang memiliki suhu yang berbeda dari lingkungan. Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan in
inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti darti darii sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitride, caesium nitrat dan litium tantalate menghasilkan arus listrik. Kemudian nitride, caesium nitrat dan litium tantalate menghasilkan arus listrik. Kemudian sebuah s
sebuah sirkuit irkuit amplifier amplifier yang ada yang ada menguatkamenguatkan arun arus ts tersebut ersebut yang kemudyang kemudianian dibandingkan oleh komparator
dibandingkan oleh komparator sehisehingga menghasilkan outngga menghasilkan output.put.
2.4
2.4 LM35 sebagai LM35 sebagai Pendeteksi Pendeteksi SuhuSuhu
Sensor LM35 adalah komponen elektronika yang memiliki fungsi untuk
Sensor LM35 adalah komponen elektronika yang memiliki fungsi untuk
mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Cara
mengubah besaran suhu menjadi besaran listrik dalam bentuk tegangan. Cara
kerja sensor LM35 dapat dilihat pada gambar 2.4 berikut ini.
kerja sensor LM35 dapat dilihat pada gambar 2.4 berikut ini.
Gambar 2.5 Cara Kerja sensor LM35 Gambar 2.5 Cara Kerja sensor LM35 Sumber:
Sumber: http://ilham99.ngeblhttp://ilham99.ngeblogs.com/2009/10/04ogs.com/2009/10/04/pengertian-sen/pengertian-sensor/ sor/
Berdasarkan pada gambar 2.5, Untuk komponen sensor suhu, parameter Berdasarkan pada gambar 2.5, Untuk komponen sensor suhu, parameter ini harus dipertimbangkan dan ditangani dengan baik karena hal ini dapat ini harus dipertimbangkan dan ditangani dengan baik karena hal ini dapat menyeb
menyebabkan abkan kesalahan kesalahan pengukuran. pengukuran. Seperti Seperti sensor sensor suhu suhu jenis jenis RTDRTD PT100
PT100 atau atau PT1000 PT1000 misalnyamisalnya, , komponen komponen ini ini tidak tidak boleh boleh dieksitasi dieksitasi oleh oleh arusarus melebihi
melebihi 1 1 miliampermiliampere, e, jika jika melebihi, melebihi, maka maka sensor sensor akan akan mengalami mengalami self- self-heating yang menyebabkan hasil pengukuran senantiasa lebih t
heating yang menyebabkan hasil pengukuran senantiasa lebih t inggi dibandingkaninggi dibandingkan suhu yang sebenarny
suhu yang sebenarnya. Berikut a. Berikut ini adalah spesifikasi dari sensor LM35:ini adalah spesifikasi dari sensor LM35: 1)
1) Dapat dikalibrasi langsung ke Dapat dikalibrasi langsung ke dalam besaran Celcius.dalam besaran Celcius. 2)
2) Faktor skala linier +10mV/ °C.Faktor skala linier +10mV/ °C. 3)
3) Tingkat akurasi 0,5°C saat suhu kamar (25°C).Tingkat akurasi 0,5°C saat suhu kamar (25°C).
Suhu Suhu
4)
4) Jangkauan suhu antara -55°C sampai 150°C.Jangkauan suhu antara -55°C sampai 150°C. 5)
5) Tegangan masukan 4 Volt hingga 30 Volt.Tegangan masukan 4 Volt hingga 30 Volt. 6)
6) Kerja kurang dari 60 µA.Kerja kurang dari 60 µA. 7)
7) Impedansi keluaran rendah 0,1Impedansi keluaran rendah 0,1ΩΩ untuk beban 1 mA.untuk beban 1 mA.
Rumus perbandingan besarnya tegangan listrik yang dihasilkan dengan Rumus perbandingan besarnya tegangan listrik yang dihasilkan dengan suhu yang dideteksi oleh sensor LM35 adalah sebagai berikut:
suhu yang dideteksi oleh sensor LM35 adalah sebagai berikut:
Suhu =
Suhu =
V
V
10
10
Keterangan: Keterangan:Suhu = Suhu yang dideteksi oleh sensor LM35 (°C) Suhu = Suhu yang dideteksi oleh sensor LM35 (°C) V = Besar tegangan yang dihasilkan (mV)
V = Besar tegangan yang dihasilkan (mV)
Agar mikrokontroler mampu membaca suhu yang diterima sensor LM35 Agar mikrokontroler mampu membaca suhu yang diterima sensor LM35 dengan tepat, maka besarnya suhu yang diterima LM35 harus dikonversi terlebih dengan tepat, maka besarnya suhu yang diterima LM35 harus dikonversi terlebih dahulu menggunakan rumus berikut ini:
dahulu menggunakan rumus berikut ini:
Suhu
Suhu ADC=
ADC=
Suhu
Suhu
∗∗
175
175
255
255
−−
12
12
Keterangan:Keterangan:
Suhu ADC = Nilai suhu yang terbaca pada mikrokontroler Suhu ADC = Nilai suhu yang terbaca pada mikrokontroler Suhu = Nilai suhu
Suhu = Nilai suhu yang terdeteksi oleh sensor LM35 (°C)yang terdeteksi oleh sensor LM35 (°C)
2.5
2.5 Liquid Crystal Liquid Crystal Display Display sebagai sebagai Layar Layar TampilanTampilan
Liquid Crystal Display (LCD) dapat dengan mudah dihubungkan dengan Liquid Crystal Display (LCD) dapat dengan mudah dihubungkan dengan mikrokontroller seperti ATMEGA8535. Sesuai standarisasi yang cukup terkenal mikrokontroller seperti ATMEGA8535. Sesuai standarisasi yang cukup terkenal digunakan banyak vendor LCD, yaitu HD44780, yang memiliki
digunakan banyak vendor LCD, yaitu HD44780, yang memiliki chipchip kontrolerkontroler Hitachi 44780. LCD bertipe ini memungkinkan pemrogram untuk Hitachi 44780. LCD bertipe ini memungkinkan pemrogram untuk
mengoperasi
mengoperasikan komunikasi data secara 8 bit atkan komunikasi data secara 8 bit atau 4 bit. Berikut au 4 bit. Berikut adalah rangkaiadalah rangkaianan interface LCD dan susunan umum kaki LCD bert
interface LCD dan susunan umum kaki LCD bertipe HD44780.ipe HD44780.
Gambar 2.6 S
Gambar 2.6 Skematikematik Rangkaian Ik Rangkaian Interface LCDnterface LCD
Berdasarkan gambar 2.6, Jika menggunakan jalur data 4 bit akan ada 7 Berdasarkan gambar 2.6, Jika menggunakan jalur data 4 bit akan ada 7 jalur (3 untuk jalur kontrol & 4 untuk jalur data). Jika menggunakan jalur data 8 jalur (3 untuk jalur kontrol & 4 untuk jalur data). Jika menggunakan jalur data 8 bit maka akan ada 11 jalur (3 untuk jalur kontrol & 8 untuk jalur data). Tiga jalur bit maka akan ada 11 jalur (3 untuk jalur kontrol & 8 untuk jalur data). Tiga jalur kontrol ke LCD ini adalah EN (
kontrol ke LCD ini adalah EN ( Enable Enable)), , RRS S (( Register Select Register Select ) dan R/W) dan R/W (( Read Read / / WriteWrite).).
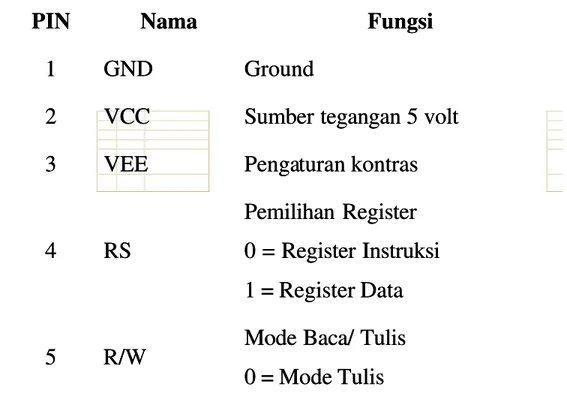
Tabel 2.8 Daftar Pin LCD
Tabel 2.8 Daftar Pin LCD HD44780HD44780 PIN
PIN NamaNama FungsiFungsi 1
1 GND GND GroundGround 2
2 VCC VCC Sumber Sumber tegangan tegangan 5 5 voltvolt 3
3 VEE VEE PengaPengaturan turan kontraskontras
4 4 RSRS Pemilihan Register Pemilihan Register 0 = Register Instruksi 0 = Register Instruksi 1 = Register Data 1 = Register Data 5 R/W
5 R/W Mode Baca/ TulisMode Baca/ Tulis 0 = Mode Tulis 0 = Mode Tulis
1 = Mode Baca 1 = Mode Baca 6 6 EE Enable Enable
0 = start to lacht data to LCD 0 = start to lacht data to LCD character character 1= disable 1= disable 7 7 DB0 DB0 LSB/Data LSB/Data 00 8 8 DB1 DB1 Data Data 11 9 9 DB2 DB2 Data Data 22 10 10 DB3 DB3 Data Data 33 11 11 DB4 DB4 Data Data 44 12 12 DB5 DB5 Data Data 55 13 13 DB6 DB6 Data Data 66 14 14 DB7 DB7 MSB/Data MSB/Data 77 15
15 BPL BPL Back Back Plane Plane LightLight 16
16 GND GND GroundGround
Berdasarkan pada tabel 2.8, terdapat Jalur EN yang dinamakan Enable. Berdasarkan pada tabel 2.8, terdapat Jalur EN yang dinamakan Enable. Jalur ini digunakan untuk memberitahu LCD bahwa sedang mengirimkan sebuah Jalur ini digunakan untuk memberitahu LCD bahwa sedang mengirimkan sebuah data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat data. Untuk mengirimkan data ke LCD, maka melalui program EN harus dibuat logika low “0” dan set pada dua jalur kontrol yang lain RS dan RW. Ketika dua logika low “0” dan set pada dua jalur kontrol yang lain RS dan RW. Ketika dua jalur yang lain telah siap, set EN dengan logika “1” dan tunggu untuk sejumlah jalur yang lain telah siap, set EN dengan logika “1” dan tunggu untuk sejumlah waktu tertentu (sesuai dengan datasheet dari LCD tersebut ) dan berikutnya set waktu tertentu (sesuai dengan datasheet dari LCD tersebut ) dan berikutnya set EN ke
EN ke logika low “0” lagi.logika low “0” lagi.
Jalur RS adalah jalur Register Select. Ketika RS berlogika low “0”, data Jalur RS adalah jalur Register Select. Ketika RS berlogika low “0”, data akan dianggap sebagai sebuah perintah atau
akan dianggap sebagai sebuah perintah atau instruksi khusus (seperti clear screen,instruksi khusus (seperti clear screen, posisi petunjuk, dll). Ketika RS berlogika high “1”, data yang dikirim adalah data posisi petunjuk, dll). Ketika RS berlogika high “1”, data yang dikirim adalah data