PERANCANGAN SISTEM KENDALI OPTIMAL MULTIVARIABEL LINEAR QUADRATIC GAUSSIAN (LQG) PADA KAPAL FPB 38 UNTUK MENINGKATKAN PERFORMANSI MANUVERING
(Dinayati Rodliyah, Aulia Siti Aisyah, A. A. Masroeri) Jurusan Teknik Fisika – Fakultas Teknologi Industri
Institut Teknologi Sepuluh Nopember Kampus ITS, Keputih – Sukolilo, Surabaya 60111
Abstrak
Kapal FPB 38 merupakan kapal militer untuk patroli keamanan yang digunakan oleh TNI-AL dalam mempertahankan keutuhan wilayah Negara Kesatuan Republik Indonesia (NKRI). Kapal ini membutuhkan kecepatan tinggi dan gerakan manuver kapal yang akurat dengan mempertahankan kestabilan kapal untuk menjalankan misinya. System kendali Linear Quadratic Gaussian (LQG) digunakan untuk mengendalikan system kemudi (maneuvering) pada kapal FPB 38 dalam penelitian ini karena sifat robust dari LQG mampu mengatasi gangguan frekuensi tinggi. LQG digunakan untuk mengendalikan dua variabel kendali yaitu sway dan yaw, dan penangan terhadap gangguan gelombang. Hasil simulasi dari uji maneuver turning, tracking setpoint, dan zig-zag memperlihatkan bahwa kapal FPB 38 mampu melakukan maneuver sesuai dengan setpoint yang diberikan.
Kata kunci : Kendali LQG, Kapal FPB 38.
Abstract
FPB 38 is a military ship for security patrol that being used by Indonesia’s Army for maintaining the unity of Republic of Indonesia. This ship needs high velocity and accurate maneuvering motions also maintaining stability of ship to fullfill its mission. In this research, Linear Quadratic Gaussian (LQG) as a kendaliler is used to kendali maneuvering system in FPB 38 because of robust characteristics from this methode that can overcome high frecuency noise. LQG is used to kendali two variable state that are sway and yaw, and to overcome sea waves noise. Simulation result from maneuver trial of turning, zig-zag and tracking setpoint, it shows that FPB 38 can do a maneuver according to setpoint to be given.
Keywords: LQG Kendaliler, FPB 38.
I. PENDAHULUAN
1.1 Latar Belakang
Negara Indonesia merupakan negara kepulauan, yaitu negara yang memiliki ribuan pulau baik besar maupun kecil, diantara pulau satu dengan pulau lainnya dihubungkan oleh perairan/lautan. Kondisi tersebut menjadikan Indonesia sebagai negara maritim yang rawan akan perompakan/bajak laut, pencurian ikan oleh kapal-kapal asing diwilayah perairan Indonesia, pencurian benda-benda cagar budaya, illegal logging melalui perairan laut, serta rawannya konflik perbatasan diwilayah perairan/laut dengan negara tetangga. Kapal perang jenis Kapal Patroli Cepat (Fast Patrol Boat) inilah yang digunakan oleh TNI-AL dalam mempertahankan keutuhan wilayah Negara Kesatuan Republik Indonesia (NKRI) merupakan kapal militer untuk patroli keamanan, maka dibutuhkan kecepatan tinggi dan gerakan manuver kapal yang akurat dengan mempertahankan kestabilan kapal.
Sistem kendali pada manuvering kapal didasarkan pada metode perancangannya, dapat dibedakan dalam 4 metode, yaitu metode konvensional, adaptif, modern dan berbasis kepakaran. Perancangan sistem kendali konvensional yang telah dilakukan oleh beberapa peneliti ternyata menemui banyak kelemahan, yaitu tidak mampu menangani gangguan pada
frekuensi tinggi. Kelemahan ini mampu diatasi oleh strategi pengendalian optimal. Salah satu strategi pengendalian optimal adalah LQG (Linear Quadratic Gaussian). Ciri dari strategi pengendalian optimal adalah bersifat kokoh (robust), yaitu sistem kendali yang mampu mengatasi gangguan dalam frekuensi rendah maupun tinggi. Seperti pada perancangan sistem kendali LQG/LTR yang dilakukan oleh Aulia S. Aisjah, dkk [2], perancangan kendali LQG/LTR pada kapal tanker dapat menghasilkan performansi kerobustan yan baik, sehingga sistem kendali LQG ini akan digunakan pada kapal FPB 38 dengan tujuan dapat mengatasi gangguan-gangguan di perairan laut yang berfrekuensi tinggi, yakni gelombang laut. 1.2 Perumusan masalah
Permasalahan dalam tugas akhir ini adalah bagaimana merancang sistem kendali optimal multivariabel Linear Quadratic Gaussian (LQG) pada kapal FPB untuk meningkatkan performansi manuvering kapal melalui uji performansi pada saat uji manuver turning, zig-zag dan tracking set point melalui simulasi.
1.3 Batasan masalah
Adapun batasan masalah yang diberikan pada penelitian ini antara lain:
1. Sistem kendali Linier Quadratic Gaussian (LQG) berorientasi pada pengendalian manuver kapal
FPB berdasarkan data spesifikasi pada kapal tersebut.
2. Sistem Kendali Linier Quadratic Gaussian (LQG) berorientasi pada penanganan terhadap gangguan gelombang di laut.
3. Variabel yang dikendalikan adalah yaw dan sway. 4. Uji performansi manuvering kapal FPB yang dianalisa meliputi uji pada saat kapal melakukan manuver turning, zig-zag dan uji tracking set point melalui simulasi.
5. Simulasi hasil perancangan sistem kendali dilakukan pada software Matlab.
1.4 Tujuan Penelitian
Tujuan dari tugas akhir ini adalah merancang sistem kendali manuver kapal FPB 38 dengan menggunakan metode Linear Quadratic Gaussian (LQG) untuk meningkatkan performansi maneuvering pada kapal.
II. DASAR TEORI 2.1 Kapal Cepat FPB 38
Kapal FPB 38 termasuk kapal berbadan planing hull, dengan konfigurasi sistem propulsi diesel putaran tinggi dengan penataan poros berbentuk V (Vee-arrangement). Propeller kapal cepat planning hull umumnya beroperasi pada kondisi superkavitasi, namun beberapa diantaranya dirancang dengan propeller yang sesuai dengan kondisi sub-kavitasi hingga kecepatan 40 knot. Spesifikasi dari kapal cepat jenis ini adalah sebagai berikut :
Length Over All (Hull) : 42,0 m Length Water Line : 38,0m
Length Between Perpendiculars (LPP) : 36,7m Breadth : 7,3m Depth : 4,47 m Draught Design : 1,65 m Draught Loaded : 1,85 m Speed : 30 Knot Displacement : 136,2 ton Complement : 25 Persons
Propeller : 2 set @ 4 blade, diameter max 1300 mm dan terbuat dari campuran Ni – Al – Bronze, sedangkan shaftnya terbuat dari stainless steel.
Rudder Area : 0,69 m2
2.2 Model Dinamika Kapal
Secara umum, ada enam macam gerakan yang dialami sebuah kapal ketika melaju di lautan, yaitu yaw, heave, surge, sway, roll, dan pitch. Gerakan-gerakan ini disebut juga 6 Degree of Freedom (6 Derajat kebebasan) yang akan dijelaskan melalui Gambar 1.
Gambar 1 6 Derajat Kebebasan Pada Gerakan Kapal Bentuk umum persamaan manuvering kapal dinyatakan dalam bentuk :
L
v
D
M
(2.1) dengan ν = [u, v, r]T merupakan vektorkecepatan. M dan D merupakan matrik inersia dan redaman yang diperoleh dari linierisasi persamaan gaya dan momen pada arah surge, sway dan yaw.
Pada matriks M dan D di atas mengandung parameter hidrodinamika kapal, dimana m = massa kapal, ̇=
turunan gaya arah sway terhadap ̇, ̇ = turunan gaya arah yaw terhadap ̇, ̇= turunan momen yaw terhadap ̇, = turunan gaya arah sway terhadap v, = turunan gaya arah yaw terhadap r, = turunan momen sway terhadap v, ̇= turunan omen sway terhadap ̇ , =
turunan momen yaw terhadap r, = pusat massa. Pada pendekatan teori slender body strip turunan koefisien hidrodinamika dapat dinyatakan sebagai fungsi dari rasio panjang terhadap lebar dari kapal, dengan dikalikan sebuah konstanta tertentu. Smitt (1970), Norrbin (1971), dan Inoue (1981) mengembangkan suatu rumusan secara empiris dari beberapa persamaan turunan koefisien hidrodinamika yang dikemukakan oleh Clarke (1982). ̇ ′ ( ⁄ ) = 1 + 0.16 − 5.1 (2.5a) ̇ ′ ( ⁄ ) = 0.67 − 0.0033 (2.5b) ̇ ′ ( ⁄ ) = 1.1 − 0.041 (2.5c) ̇ ′ ( ⁄ ) = + 0.017 − 0.33 (2.5d) ′ ( ⁄ ) = 1 − 0.4 (2.5e) ′ ( ⁄ ) = − + 2.2 − 0.08 (2.5f) ′ ( ⁄ ) = + 2.4 (2.5g) ′ ( ⁄ ) = + 0,039 − 0.56 (2.5h)
Sedangkan untuk gaya dan momen yang diakibatkan rudder
= (2.6) = (2.7) Bentuk normalisasi yang biasa digunakan untuk persamaan gerak steering kapal adalah Prime Sistem dari SNAME (1950).Sistem ini menggunakan kecepatan kapal U, panjang L=Lpp (panjang antara
bagian depan dan garis tegak lurus buritan), unit waktu L/U dan unit massa 1/2ρL3atau 1/2ρL2T sebagai variabel normalisasi.
′ = =
( ∆ ) ∆ ≈ 1 (2.8)
Untuk harga yang kecil dari ∆ dan ∆ , bentuk normalisasi untuk kecepatan sway, yawrate, dan defleksi rudder adalah:
= ′ ; = ′ ; = ′ (2.9)
Sebuah alternatif gambaran untuk model Schiff dan Davidson dapat diperoleh dengan menggunakan struktur model dimana variabel-variabel state aktual digabungkan dengan parameter-parameter model non-dimensional, sehingga dapat dituliskan dengan:
⎣ ⎢ ⎢ ⎢ ⎡ ′ 0 0 0 ′ ′ 0 ′ ′ ⎦ ⎥ ⎥ ⎥ ⎤ ̇ ̇ ̇ + ⎣ ⎢ ⎢ ⎢ ⎡ ′ 0 0 0 ′ ′ 0 ′ ′ ⎦ ⎥ ⎥ ⎥ ⎤ = 0 ′ ′ (2.10)
Dimana ′ , ′ , dan ′ diturunkan lagi sesuai dengan Sistem Prime I dalam Tabel 2.2.
2.2.1 Model Dinamika Kapal dalam Frekuensi Rendah Parameter hidrodinamika pada maneuvering kapal dalam bidang horizontal, dengan sumbu x arah forward dan sumbu y arah port, dan r bernilai positif untuk belok kiri. Gerak dalam enam derajat kebebasan yang dinyatakan dalam gerak translasi: surge, sway dan heave, sedangkan gerak rotasi terhadap ketiga sumbu yaitu: roll, pitch dan yaw.
Adanya gelombang dengan frekuensi rendah dan tinggi pada saat kondisi air tenang dan rough sea menyebabkan posisi kapal akan dipengaruhi oleh gangguan tersebut. Pada penelitian ini dilakukan pemodelan ke dalam dua range frekuensi, yaitu frekuensi tinggi dan frekuensi rendah. Model dinamika posisi kapal dalam frekuensi rendah dapat digambarkan dalam model linier surge, sway dan yaw. Pada studi simulasi dan eksperimen, menunjukkan bahwa Coriolis dan damping nonlinier dapat diabaikan, sehingga model dapat dinyatakan dalam bentuk:
̇ + ( − ) = + (2.11)
Dengan = [ , , ] merupakan vektor kecepatan frekuensi rendah, = [ ] merupakan vector kecepatan arus, vektor kendali gaya dan momen. Dan = [ , , ] vektor gangguan dengan zero Mean Gaussian white noise process. bukan menunjukkan secara fisik kecepatan arus, tetapi pengaruh arus dalam gerak yaw. Matriks inersia dan redaman adalah: = − ̇ 0 0 0 − ̇ − ̇ 0 − ̇ − ̇ , = − 0 0 0 − − 0 − − (2.12) Dari persamaan kinematika kapal, = . Dimana:
= [ , , ]
Persamaan keadaan secara umum untuk dinamika posisi kapal:
̇ = + + (2.13) Dimana: = [ , , , , , ] , dan = 0 0 − ; = 0 ; = 0
2.2.2 Model Gangguan Gelombang dalam Frekuensi Tinggi
Berdasarkan model gelombang yang dibangkitkan oleh angin dengan fungsi transfer orde dua, yang berdampak pada gerak surge, sway dan yaw, maka dapat diturunkan bentuk persamaan gerak ketiga tersebut akibat frekuensi tinggi dari gelombang. Model kapal dalam 3 derajat kebebasan (surge, sway dan yaw) dinyatakan dalam bentuk berikut ini:
= (2.14a) = −2 − + (2.14b) = (2.14c) = −2 − + (2.14d) = (2.14e) = −2 − + (2.14f) = (2.14g) = −2 − + (2.14h) Dengan ξ rasio redaman relative yang dapat diperoleh berdasarkan kondisi riil atau secara simulasi dan bernilai < 1.0, ω0 menandakan komponen gerak
frekuensi tinggi yang dipilih sesuai dengan gerak surge, sway, dan yaw. wx. wy, w merupakan zero
mean Gaussian white noise process.
Model gelombang frekuensi tinggi dapat dinyatakan dengan:
̇ = + (2.15) Dengan = , , , , , , =
, ,
Dan model akibat arus:
= (2.16) Dimana = [ , , ] , = , , ,
=
Model akibat angin = dengan: = [ , ] , = , , =
Gaya dan Momen angin: =
0.5 ( ) 0.5 ( ) 0.5 ( )
(2.17) Arah dan kecepatan angin = − − , =
2.2.3 Model Pengukuran
Pengukuran posisi diperoleh dari GPS, heading diukur dari giro kompas, sehingga variable pengukuran dihasilkan dari persamaan berikut ini:
= + + (posisi surge) = + + (posisi sway)
= + + (posisi yaw) = + (kecepatan angin) = − − + (arah angin)
Dengan vi (i = 1,…..,5) dimodelkan sebagai zero mean
Gaussian white noise process. Sehingga model kapal dengan gangguan dinyatakan sebagai:
̇ = + +
= + (2.18) Dengan state vektor = [ , , , , ] , =
+ merupakan matriks input, = [ , , , , ] , = [ , , , , ] . Matriks H merupakan konfigurasi matrik I. Pada persamaan di atas harus memenuhi observabillity dan kendalilability. Persamaan (2.18) dapat dipisahkan dalam bentuk: ̇ ̇ = 0 0 + 0 [ + ] + 1 0 0 1 (2.19) ̇ ̇ = 1 0 0 1 (2.20) Model kapal merupakan tipe kapal cepat, dengan spesifikasi pada sub bab 2.1, dengan kecepatan kapal 7.7 m/dt (=15 knot).
Gangguan dari lingkungan yang terdiri dari angin, arus laut dan gelombang, dimana dalam pemodelan struktur kendali ini dinyatakan sebagai angin sebagai pembangkit gelombang. Pembangkitan gelombang akibat angin yang dimodelkan oleh Later Saelid, Jansenn, dan Balchen (1983) yang sesuai dengan spectrum gelombang Pierson-Moskowitz (PM spectrum) dinyatakan dalam bentuk orde dua:
ℎ( ) =
Ϛ , dimana = 2Ϛ ,
= intensitas gelombang = ( ) , ξ = koefisien redaman dan merupakan frekuensi dominan gelombang.
2.4 Sistem Kendali Linear Quadratic Gaussian Kendali optimal Linier Quadratic Gaussian (LQG) adalah teknik kendali modern yang diimplementasikan dalam bentuk ruang dan waktu (state space) yang digunakan untuk mendesain dinamik optimal regulator. Pada perjalanan perkembangan konsep, LQR mengalami pengembangan yaitu dengan mengikutsertakan estimator optimal (fiter Kalman) yang berfungsi mengestimasi variabel keadaan dan menyaring noise (derau). Konsep pengembangan itu diperkenalkan pada tahun 1970 dengan nama LQG (Linier Quadratic Gaussian). Pada konsep LQG diperkenalkan konsep teori pemisahan (separation theorem) atau sering disebut Certainty Equivalence Principle. Dari hasil tersebut penguatan umpan balik dan filter dalam LQG dirancang secara terpisah. Model state space :
Gw Bu Ax x (2.36)
v
cx
y
(2.37) Keterangan : u : Input proses. y : Output proses. w : gangguan proses.v : gangguan pengukuran (white noise) A : Matrik plant.
B : Matrik kendali input. C : Matrik pengukuran.
K : Peguatan umpan balik (Kalman).
f
K : Penguatan filter kalman.
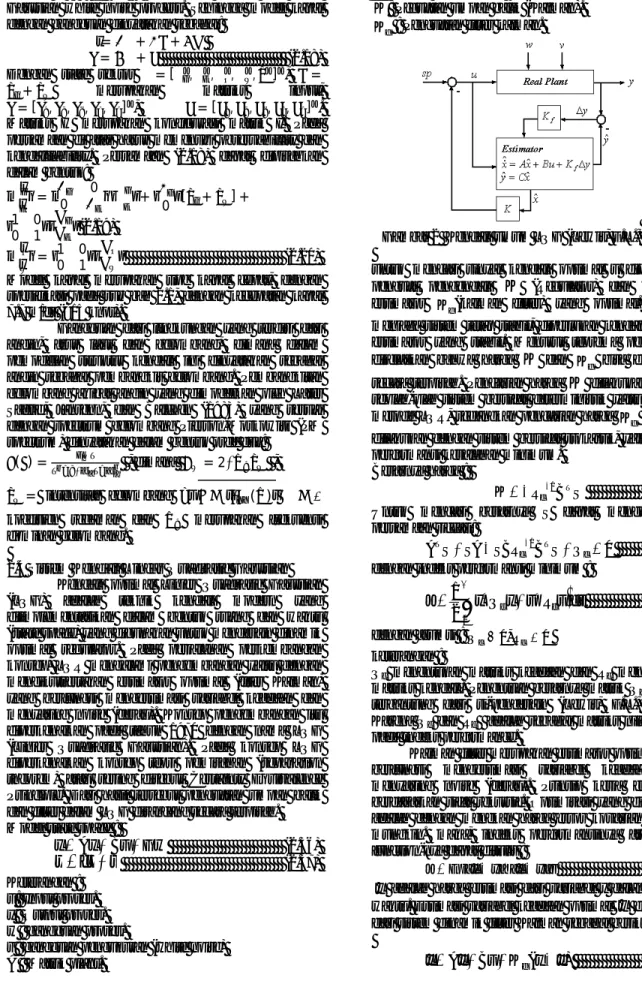
Gambar 2 Kendali umum LQG (Lewis, F.L., 1992) untuk mencari sinyal kendali optimal u diperlukan penguat pengendali K (Regulator) dan penguat estimator K (kalman filter) yang optimal. Untuk f menjaga sistem tetap stabil, diperlukan kendaliler dan estimator yang stabil. Menurut teorema pemisahan dijelaskan bahwa harga K dan K bisa diperoleh f secara terpisah. Pencarian harga K dilakukan secara seolah-olah sistem bersifat deterministik yaitu dengan metode LQR, sedangkan pencarian harga K optimal f dilakukan dengan sistem bersifat stokastik, yaitu index performansi kesalahan minimum.
Besarnya harga : S B R K c T 1 (2.38) Untuk mencari besarnya S dapat menggunakan persamaan riccati: 0 1 T c c TS SA SBR B S Q A (2.39)
dengan indeks performansi minimum :
0 2 1 dt u R u x Q x J c T c T (2.40) dengan asumsi : Qc 0,Rc 0 keterangan :Qc menentukan matriks keadaan dan Rc menentukan
matriks kendali. Penentuan besarnya matrik Qc dan Rc
tergantung dari si-pendesain (Lewis, F.L., 1992). Karena Qc dan Rc adalah sebagai matriks nilai bobot
pada indeks performance.
Kalman filter merupakan estimator optimal yang berfungsi mengestimasi variabel keadaan dan menyaring noise (derau). Prinsip kerja estimator berdasarkan sifat rekursif. Optimisasi yang dilakukan adalah dengan menekan harga error kovarian sekecil mungkin. maka, indeks performansinya atau cost function-nya dapat ditulis :
]} ˆ [ ] ˆ {[x x x x E J T (2.41) xˆ adalah harga estimasi dari variabel x dalam fungsi waktu. Estimasi variabel keadaan optimal xˆ diperoleh dari sistem dinamik filter Kalman sebagai berikut :
) ˆ ( ˆ ˆ Ax Bu K y y x f (2.42)
Penguatan Kalman filter : 1 f T f PC R K (2.43) Sedangkan Matriks P diperoleh dari persamaan Riccati
Q CP R PC AP PA f T T 1 0 (2.44)
Dengan asumsi-asumsi matriks A dan B terkendali, dan C teramati Qf 0,Rf 0, maka kalman filter dijamin
stabil asimtotik. Matriks Qf dan Rf adalah noise
covariance, dengan noise proses w(t)~(0, Qf) dan
pengukuran n(t)~(0,v2Rf) adalah white noise. Matriks
pembobot pada indeks performansi dipilih untuk menggunakan performansi desain kendali.
III. METODOLOGI PENELITIAN Gambar 3 di bawah ini merupakan flowchart tahapan penelitian untuk mempermudah dalam memahami alur penelitian.
Gambar 3 Flowchart Penelitian 3.1 Pemodelan sistem
Model dinamika kapal FPB 38 menggunakan bentuk state space (ruang keadaan) yang ditunjukkan pada persamaan 2.18 dimana dilakukan pemisahan terhadap pemodelan frekuensi rendah dan frekuensi tinggi sesuai dengan persamaan 2.19 dan 2.20. Adapun pemodelan pada frekuensi rendah berasal dari persamaan 2.13 yang di dalamnya terdapat komponen matriks M (inersia) dan D (damping). Matriks ini mengandung parameter hidrodinamika kapal, yaitu sebagai berikut: ̇ ′= 0.03746 ̇ ′= 0.00580 ̇ ′ = 0.00707 ̇ ′ = 0.00085 ′= 0.04728 ′= −0.00899 ′ = 0.03691 ′ = 0.00942 ′= 3.34798 ′ = −1.67399 ′ = −0.16270 ′ = 0.16470 ′ = −0.00037 ̇ ′ = −0.00168
Nilai koefisien hidrodinamika di atas diperoleh berdasarkan perhitungan yang diuraikan pada Lampiran A. Nilai koefisien hidrodinamika tersebut merupakan koefisien pada matriks M dan D berikut sesuai dengan persamaan state space 2.11, dimana vc =
wL = 0. Kemudian dengan menggunakan konsep invers
matriks, diperoleh model persamaan ruang keadaan sebagai berikut, ̇ ̇ ̇ = −0.0182 0 0 0 −0.3961 0.0717 0 −0.0031 0.000001 + 909.0909 0 0 0 124.2645 6.6379 0 0.1805 1.0778 0 3.34798 −1.67399 (3.2)
Pemodelan kapal frekuensi rendah ditunjukkan oleh persamaan 2.13 dengan variabel keadaan = [ , , , , , ] adalah sebagai berikut: = × × × −0.0182 0 0 0 −0.3961 0.0717 0 −0.0031 0.000001 (3.3) = × 0 32.1298 −1.7414 (3.4) = × 909.0909 0 0 0 124.2645 6.6379 0 0.1805 1.0778 (3.5) Model frekuensi tingi merupakan pemodelan ganguan gelombang yang dibangkitkan oleh angin menggunakan persamaan 2.15 dalam bentuk state space sebagai berikut:
Mulai
Pengambilan Data
Perancangan Sistem Kendali LQG
Performansi memenuhi?
Kesimpulan hasil analisa dan pengujian Studi literatur
Pemodelan sistem
Pengujian dan analisa
⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ ̇̇ ̇ ̇ ̇ ̇ ⎦⎥ ⎥ ⎥ ⎥ ⎥ ⎤ = ⎣ ⎢ ⎢ ⎡−2 0 0 0 −2 0 0 0 −2 − 0 0 0 − 0 0 0 − × 0 × ⎦ ⎥ ⎥ ⎤ ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ + × (3.6) Dengan = 0.4 , = 0.1, dan = 2 . Dimana g = 9.8 m/s, H = 1.5 meter, = 3.16. Sehingga model gelombang laut pada persamaan di atas menjadi ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ ̇̇ ̇ ̇ ̇ ̇ ⎦⎥ ⎥ ⎥ ⎥ ⎥ ⎤ = −0.2045 0 0 0 −0.2045 0 0 0 −0.2045 −1.0453 0 0 0 −1.0453 0 0 0 −1.0453 × × ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ + 0.6462 × (3.7) E =
Model dinamika kapal dengan gangguan gelombang dinyatakan sesuai persamaan 2.15 dengan dilakukan pemisahan terhadap pemodelan frekuensi rendah dan
frekuensi tinggi sesuai dengan persamaan 2.17sebagai berikut, = = ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ × × × × × −0.0182 0 0 0 −0.396 0.0717 0 −0.0031 0.00001 × × × × × × −0.2045 0 0 0 −0.2045 0 0 0 −0.2045 −1.0453 0 0 0 −1.0453 0 0 0 −1.0453 × × ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ = 0 = ⎣ ⎢ ⎢ ⎢ ⎢ ⎡ × × × 0 0 0 0 0 32.1298 0 0 −1.7414 × × × × ⎦ ⎥ ⎥ ⎥ ⎥ ⎤ , (3.9)
Dengan variabel keadaan
= , , , , , , , , , , , ] , = , = , , , , , . Untuk model pengukuran dalam frekuensi tinggi dari persamaan 2.16 adalah sebagai berikut:
= 1 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 1 0 0 0 0 0 0 1 0 0 0 0 0 1 0 0 0 ⎣ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎡ ⎦ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎤ + ⎣ ⎢ ⎢ ⎢ ⎢ ⎡00 1 0 0 1⎦ ⎥ ⎥ ⎥ ⎥ ⎤ (3.10)
3.2 Perancangan sistem kendali
Pada tahapan ini akan dilakukan perancangan sistem pengendalian menggunakan metode Linear Quadratic Gaussian (LQG) setelah dilakukan pemodelan sistem. Alur perancangan sistem kendali dapat dilihat pada diagram alir Gambar 3. Dan dijelaskan sebagai berikut:
a. Perancangan Regulator
Langkah pertama adalah menentukan matriks estimator dan meletakkannya pada diagram seperti pada Gambar 2.4. menentukan matriks Qc dan Rc untuk
mendapatkan indeks performansi yang minimum (J) dari persamaan
Kemudian, nilai Q digunakan dalam persamaan Ricatti berikut ini untuk mendapatkan matriks S. 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 -469.48 0 0 0 0 0 0 124.26 6.6379 0 0.1805 1.0778 0 0 0 0 0 0 0 0 0.6462 0 0 0 0 0 0.6462 0 0 0 0 0 0.6462 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 2 1 dt u R u x Q x J c T c TB ∫ -C B C A ∫ K A + + + + + + + + y x u s + -
Matriks S digunakan untuk mendapatkan nilai gain regulator,
(3.16)
b. Perancangan Kalman Filter
Mengestimasi variabel keadaan optimal xˆ diperoleh dari sistem dinamik filter Kalman (estimator) sebagai berikut :
Kemudian mendapatkan penguatan Kalman filter :
Sedangkan Matriks P diperoleh dari persamaan Riccati :
(3.19)
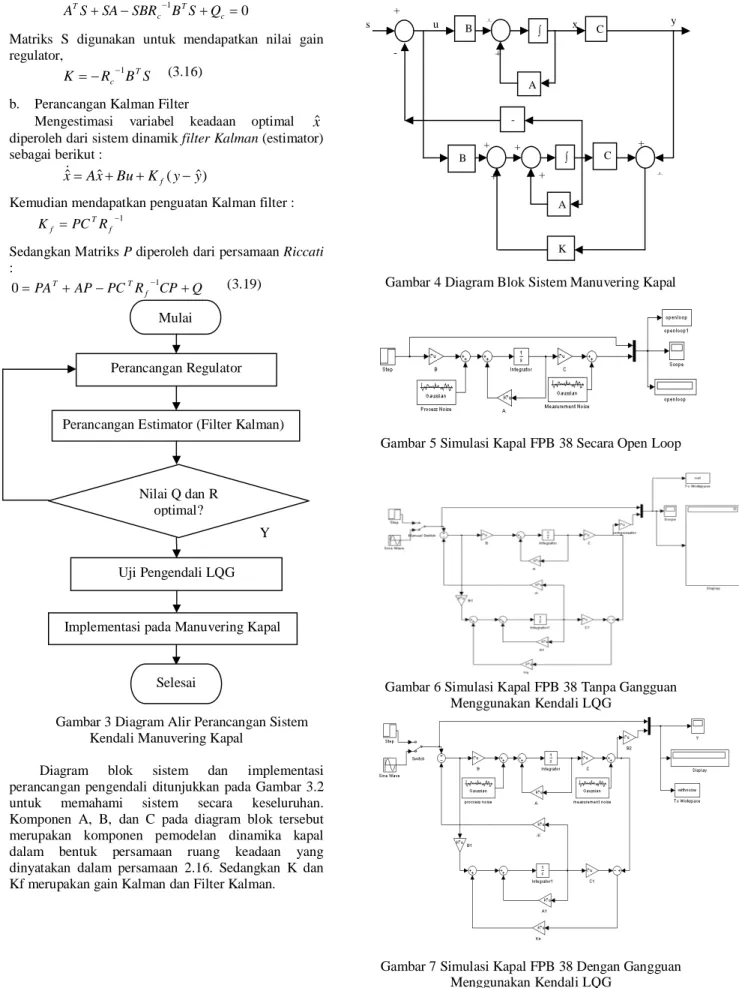
Gambar 3 Diagram Alir Perancangan Sistem Kendali Manuvering Kapal
Diagram blok sistem dan implementasi perancangan pengendali ditunjukkan pada Gambar 3.2 untuk memahami sistem secara keseluruhan. Komponen A, B, dan C pada diagram blok tersebut merupakan komponen pemodelan dinamika kapal dalam bentuk persamaan ruang keadaan yang dinyatakan dalam persamaan 2.16. Sedangkan K dan Kf merupakan gain Kalman dan Filter Kalman.
Gambar 4 Diagram Blok Sistem Manuvering Kapal
Gambar 5 Simulasi Kapal FPB 38 Secara Open Loop
Gambar 6 Simulasi Kapal FPB 38 Tanpa Gangguan Menggunakan Kendali LQG
Gambar 7 Simulasi Kapal FPB 38 Dengan Gangguan Menggunakan Kendali LQG 0 1 T c c TS SA SBR B S Q A S B R K T c 1 ) ˆ ( ˆ ˆ Ax Bu K y y x f 1 f T f PC R K Q CP R PC AP PA f T T 1 0 Mulai Tidak Perancangan Regulator
Perancangan Estimator (Filter Kalman)
Uji Pengendali LQG Nilai Q dan R
optimal?
Implementasi pada Manuvering Kapal Y a
3.3 Pengujian dan analisa
Pada tahapan ini akan dilakukan pengujian performansi manuvering kapal melalui software Matlab pada saat kapal melakukan manuver turning, zig-zag, dan uji tracking setpoint kemudian melakukan analisa. a. Uji maneuver turning
Pada uji manuver turning, setpoint diberikan nilai sudut yaw sebesar 20o dan nilai arah sway 20 meter,
kemudian dibuat grafik respon sistem. b. Uji maneuver zig-zag
Pada uji manuver zig-zag, setpoint diberikan nilai sudut yaw 20o kemudian ditahan dalam beberapa detik dan dibelokkan negatif 20o, untuk arah sway diberikan
setpoint 20 meter dengan perlakuan yang sama. Setpoint diberikan sinyal sinusoidal dengan nilai frekuensi adalah ¼ dari time settling respon pada saat maneuver turning. Kemudian, dibuat grafik respon sistem.
c. Uji maneuver tracking setpoint
Pada uji ini, kapal diberikan set point sudut yaw 20o kemudian dibelokkan sejauh 30o (sudut yaw), dimana waktu tempuh untuk setpoint 20o disesuaikan dengan besarnya settling time arah sway dan sudut yaw pada saat maneuver turning. Kemudian dibuat grafik respon sistem.
IV. ANALISA DAN PEMBAHASAN HASIL SIMULASI
4.1 Pengujian Performansi Sistem Secara Open Loop
Gambar 8 Respon arah sway terhadap pengujian open loop
Gambar 9 Respon sudut yaw terhadap pengujian open loop
Pada Gambar 8 dan 9 ditunjukkan hasil bahwa respon pada arah sway tidak dapat mengikuti set point (menjauh ke arah positif sway) dan begitu pula respon arah yaw (menjauh ke arah negative yaw).
4.2 Implementasi Sistem Kendali
1. Perancangan Estimator dan Filter Kalman
Untuk penentuan nilai filter Kalman, dilakukan tuning matriks Q dan R, sama seperti penentuan gain regulator.
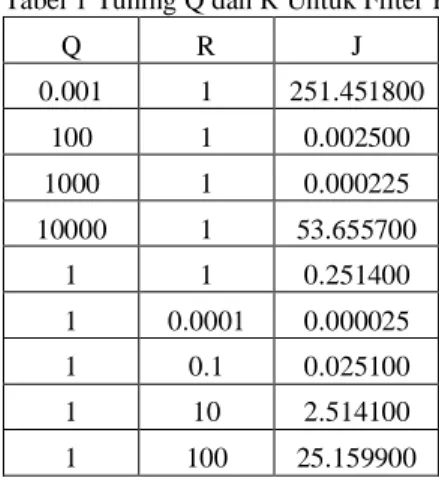
Tabel 1 Tuning Q dan R Untuk Filter Kalman
Q R J 0.001 1 251.451800 100 1 0.002500 1000 1 0.000225 10000 1 53.655700 1 1 0.251400 1 0.0001 0.000025 1 0.1 0.025100 1 10 2.514100 1 100 25.159900
Dari hasil penalaan, diambil matriks Q dan R dengan indeks performansi minimum untuk digunakan dalam menentukan Kalman filter. Matriks Q = 1000 dan R = 1 memiliki indeks performansi paling minimum.
2. Perancangan Regulator
Pada pemodelan dinamika kapal, diperoleh matriks A, B, dan C dari persamaan ruang keadaan 2.18. Matriks ini merupakan hasil dari pemodelan dinamika kapal dalam frekuensi rendah dan tinggi. Matriks ini harus memiliki syarat keterkendalian dan keteramatan. Melalui perhitungan menggunakan persamaan 3.1 dan 3.2 diperoleh hasil bahwa rank Uk =
3 dan rak Vk = 3, sehingga sistem ini terkendali dan
teramati. Kemudian matriks ini diletakkan dalam diagram blok LQG. Kemudian melakukan tuning matriks pembobot Q dan R untuk mendapatkan gain regulator (K). Nilai matriks Q dan R ditentukan dari persamaan 3.3 untuk mendapatkan indeks performansi yang minimum. Matriks-matriks ini merupakan matriks diagonal dengan orde 12x12 dan nilai pada diagonalnya dapat dilihat pada tabel 4.1 beserta nilai indeks performansi yang diperoleh.
Tabel 2 Tuning Q dan R Untuk Gain Kalman
Q R J 1 1 8.5 1 10 31 1 100 256 1 1000 2506 0.1 1 3.1 0.01 1 2.56 0.001 1 2.506 0.0001 1 2.5006
Dari Tabel 2, nilai indeks performansi terkecil adalah 2.5006 pada Q = 0.0001 dan R = 1. Sehingga nilai Q dan R tersebut dipakai untuk memperoleh nilai gain regulator. Hasil dari tuning matriks pembobot Q dan R ditunjukkan pada Tabel 2.
4.3.1 Uji Simulasi Sistem Manuvering Kapal Tanpa Gangguan
4.3.1.1 Uji Manuver Turning a. Arah sway
Gambar 10 Grafik respon arah sway pada saat uji maneuver turning tanpa gangguan
Respon sistem yang diperoleh dalam bentuk respon orde dua dengan maximum overshoot 6,108 meter, peak time 1.73 sekon, settling time 15.71 sekon, dan error steady state 0.0406.
b. Arah yaw
Respon yang diperoleh adalah respon terhadap sistem orde dua tanpa maximum overshot, settling time 35.78 sekon, dan error steady state 0.0045. Pada saat awal simulasi (mulai t = 0 sekon), respon berosilasi dengan amplitude 10 derajat di 1,2 sekon pertama, kemudian osilasi mengecil dan naik hingga mendekati setpoint.
Gambar 11 Grafik respon sudut yaw pada saat uji maneuver turning tanpa gangguan 4.3.1.2 Uji Manuver Zig-zag
a. Arah sway
Gambar 12 Grafik respon arah sway pada saat uji maneuver zig-zag tanpa gangguan
Pada pengujian ini, sistem diberikan setpoint dari sinyal sinusoidal dengan amplitude 20 meter (sesuai dengan standart IMO) dan frekuensi yang besarmya adalah 1⁄ , dimana adalah time settling dari respon sway/yaw yang terlama pada saat uji turning. Grafik respon uji maneuver zig-zag pada Gambar 12 menunjukkan bahwa respon sway mengikuti setpoint, bahkan respon berhimpit dengan setpoint yang diberikan. Maximum overshoot dari respon tidak melebihi 20o.
b. Arah yaw
Gambar 13 Grafik respon sudut yaw pada saat uji maneuver zig-zag tanpa gangguan
Dalam pengujian ini, diperoleh respon seperti pada Gambar 13, dimana respon yaw sesuai mampu mengikuti setpoint dan mampu mencapai sudut yang diinginkan yaitu tepat di 20 derajat. Namun, pencapaian sudut sesuai yang diharapkan (setpoint) lebih lama dari yang diharapkan. Jika dilihat dalam Gambar 13, maka respon sudut yaw bergeser 0,1 sekon.
4.3.1.3 Uji Tracking Setpoint a. Arah sway
Pada pengujian tracking setpoint, sistem diberi setpoint sebesar 20 meter selama 100 sekon, kemudian diberikan setpoint 30 meter. Respon yang dihasilkan seperti pada Gambar 14, diperoleh respon orde dua yang mampu mengikuti setpoint yang telah diberikan. Pada awal setpoint 20 maupun 30 meter, respon mengalami osilasi hingga 47 detik kemudian mengalami kondisi tunak.
Gambar 14 Grafik respon arah sway pada saat uji tracking setpoint tanpa gangguan c. Arah yaw
Respon hasil pengujian terlihat pada Gambar 15, yaitu respon sistem orde dua. Respon sudut yaw mampu mengikuti setpoint yang diberikan, dimana pada awal setpoint dan pergantian setpoint, respon mengalami osilasi dan kemudian naik menuju setpoint.
Gambar 15 Grafik respon sudut yaw pada saat uji tracking setpoint tanpa gangguan
4.3.2 Uji Simulasi Sistem Manuvering Kapal Dengan Gangguan
a. Arah Sway
Pada uji ini, kapal diberikan setpoint arah sway sebesar 20 meter kemudian diperoleh respon seperti pada Gambar 16, respon dalam bentuk orde dua, dimana maximum overshoot yang dicapai sebesar 6.1085 dengan peak time 2.34 detik, settling time 16.89 detik dan error steady state 0.06.
Gambar 16 Grafik respon arah sway pada saat uji maneuver turning dengan gangguan b. Arah Yaw
Respon dalam bentuk orde dua, dimana terjadi osilasi di awal, kemudian osilasi semakain mengecil dan respon naik perlahan mendekati setpoint. Respon ini tidak memiliki maximum overshoot, memiliki settling time 46.36 detik dan error steady state 0,1.
Gambar 17 Respon sudut yaw pada saat uji manuver turning dengan gangguan
4.3.2.2 Uji Manuver Zig-zag a. Arah Sway
Pada pengujian ini, sistem diberikan setpoint dari sinyal sinusoidal dengan amplitude 20 meter (sesuai dengan standart IMO) dan frekuensi yang besarmya adalah 1⁄ , dimana adalah time settling dari respon sway/yaw yang terlama pada saat uji turning. Grafik respon uji maneuver zig-zag pada Gambar 18 menunjukkan bahwa respon sway mengikuti setpoint, bahkan respon berhimpit dengan setpoint yang diberikan. Maximum overshoot dari respon tidak melebihi 20o.
Gambar 18 Respon arah sway pada saat uji maneuver zig-zag dengan gangguan
b. Arah Yaw
Grafik respon uji maneuver zig-zag pada Gambar 19 menunjukkan bahwa respon sway mengikuti setpoint, namun respon tidak berhimpit
dengan setpoint yang diberikan dan respon mengalami sedikit osilasi diawal. Maximum overshoot dari respon tidak melebihi 20o.
Gambar 19 Respon sudut yaw pada saat uji maneuver zig-zag dengan gangguan
Untuk mengetahui adanya peningkatan performansi, maka dilakukan pembandingan antara hasil penelitian saat ini dengan penelitian yang telah dilakukan sebelumnya. Penelitian sebelumnya, memakai data analisa respon suduy yaw pada saat uji turning yang dilakukan oleh M. Fathoni Fikri dalam penelitiannya yang berjudul “Perancangan Kontrol Manuvering Dengan Logika Fuzzy Untuk Kapal Cepat Fpb-38”. Hasil pembandingan dilihat pada Tabel 4.3. Tabel 3 Pembandingan Respon Uji Manuver Turning Antara Sistem Kendali LQG dengan Logika Fuzzy
Karakteristik respon LQG Fuzzy Maximum overshoot 0 0
Settling time 46.36 90 Error steady state 0.1 1.95
Dari Tabel 3, dapat dianalisa bahwa kapal fpb 38 menggunakan sistem kendali LQG memiliki performansi yang lebih bagus dibandingkan sistem kendali logika fuzzy. Settling time dan error steady state dari LQG lebih kecil daripada logika fuzzy, sehingga sehingga sistem maneuvering kapal akan lebih baik jika menggunakan LQG sebagai sistem kendali.
4.3.2.3 Uji Tracking Setpoint a. Arah Sway
Pada pengujian tracking setpoint, sistem diberi setpoint sebesar 20 meter selama 100 sekon, kemudian diberikan setpoint 30 meter. Respon yang dihasilkan seperti pada Gambar 20, diperoleh respon orde dua yang mampu mengikuti setpoint yang telah diberikan. Pada awal setpoint 20 maupun 30 meter, respon mengalami osilasi hingga 47 detik kemudian mengalami kondisi tunak.
Gambar 20 Respon arah sway pada saat uji tracking setpoint dengan gangguan
b. Arah Yaw
Gambar 21 Respon sudut yaw pada saat uji tracking setpoint dengan gangguan
Respon yang dihasilkan seperti pada Gambar 21, diperoleh respon orde dua yang mampu mengikuti setpoint yang telah diberikan. Pada awal setpoint 20 maupun 30 meter, respon mengalami osilasi hingga 63 detik kemudian mengalami kondisi tunak.
4.4 Lintasan Kapal Hasil Simulasi Untuk Sudut Yaw Setelah diperoleh respon sistem kemudi kapal melalui simulasi untuk sudut yaw, data hasil simulasi berupa sudut yaw yang terekam tiap detik diplotting dalam grafik x dan y (arah surge dan sway dalam meter). Kapal melaju dari sumbu x negative ke x positif dan maneuver dimulai di titik (0,0). Lintasan kapal hasil dari simulasi untuk sudut yaw dalam tiga uji maneuver diperlihatkan pada Gambar 4.8-4.10.
a. Lintasan Pada Saat Uji Manuver Turning
Gambar 22 Lintasan kapal pada saat maneuver turning Pada lintasan yang ditunjukkan Gambar 4.9, kapal FPB mampu membelok hingga 20o terhadap arah awal dari kapal (0o). Pada awal akan berbelok, grafik x-y tidak linier x-yang berarti terdapat sedikit error. Hal ini terjadi karena pada respon sudut yaw terhadap maneuver turning, terdapat osilasi satu gelombang di awal dan kemudian naik mendekati setpoint. Karena pada respon tidak memiliki overshoot, maka lintasan ini mampu menjaga sudut belok tanpa adanya osilasi (sudut berubah-ubah). Namun, pada grafik lintasan ini terlihat bahwa kapal tidak tepat belok pada sudut 20o. Sudut yang dicapai sedikit lebih dari 20o.
b. Lintasan Pada Saat Uji Tracking Setpoint
Dari lintasan pada Gambar 4.10, dapat dilihat bahwa kapal FPB 38 mampu mengikuti setpoint saat uji tracking setpoint. Kapal membelok dengan sudut 20o kemudian membelok lagi dengan sudut 30o
terhadap sumbu x. Grafik yang dihasilkan adalah linier tanpa perubahan sudut yaw pada saat lintasan masih berjalan.
Gambar 23 Lintasan kapal pada saat uji tracking setpoint
c. Lintasan Pada Saat Uji Manuver Zig-zag
Gambar 24 Lintasan kapal pada saat maneuver zig-zag Dari lintasan pada Gambar 4.11, dapat dilihat bahwa kapal mampu membuat maneuver zig-zag.jarak tempuh untuk setengah lintasan pertama, yakni pada saat kapal dibelokkan 20o pertama dan dibalikkan lagi, memiliki waktu tempuh lebih kecil dibandingkan dengan waktu tempuh saat kapal dibelokkan lagi. Atau apabila lintasan ditinjau seperti gelombang sinusoidal, maka jarak tempuh pada saat setengah gelombang pertama lebih kecil daripada setengah gelombang selanjutnya.
V. PENUTUP
5.1 Kesimpulan
Berdasarkan penelitian yang telah dilakukan, diperoleh kesimpulan sebagai berikut :
1. Kapal FPB-38 dalam kondisi loop terbuka tidak mampu melakukan aksi pengendalian ketika diberikan masukan untuk melakukan aksi turning (berbelok) 2. Dalam simulasi diperoleh bahwa sistem kendali LQG mampu melakukan aksi pengendalian sesuai dengan set point yang diberikan untuk uji manuver turning, uji tracking set point, dan uji manuver zig-zag. Sistem kendali yang dirancang memiliki performansi yang lebih baik daripada sistem kendali logika fuzzy.
5.2 Saran
Dalam rangka pengembangan penelitian, saran yang perlu disampaikan dalam laporan Tugas Akhir ini adalah :
1. Perlu dilakukan uji manuver circle (selain zig-zag dan turning) untuk lebih mengetahui performansi manuver kapal.
2. Untuk memperbaiki performansi manuvering kapal, keluaran dari kendali LQG dapat diumpankan ke dalam kendali logika fuzzy.
DAFTAR PUSTAKA
[1] Aisjah, Aulia Siti. Robust Kontrol Pada Manuvering Kapal. 2005. Seminar FT. Kelautan ITS.
[2] Aisjah S. A., Masroeri A. A., Djatmiko E. B., Aryawan W. D. Analisis Performansi Sistem Kontrol Pada Manuvering Kapal. 2007. Jurnal Teknik Fisika Vol. 2 No. 1 ISSN 1907-266X. [3] Aisjah S. A., Pengembangan Sistem Kontrol Logika
Fuzzy Pada Manuvering Kapal Berbasis Kontrol LQG/LTR Untuk Membangun Wahana Laut Tanpa Awak. 2007. Disertasi Jurusan Pascasarjana Teknik Sistem Perkapalan.
[4] Fikri, M. Fathoni. Perancangan Kontrol Manuvering Dengan Logika Fuzzy Untuk Kapal Cepat Fpb-38. 2009. Tugas Akhir Jurusan Teknik Fisika ITS.
[5] Fossen, T. I.. Guidance and Kontrol of Ocean Vehicle. 1994. John Willy and Son.
[6] Lewis, Frank L. Applied Optimal Kendali & Estimation (Digital Design & Implementation). 1992. Prentice Hall International Inc.
[7] Ogata, Katsuhiko. Modern Kendali Engineering 4th Edition. 2002. Prentice Hall.
[8] Widati, Retno Ayu. Perancangan Sistem Pengendalian Pitching Pada Kapal Selam Dengan Metode Linear Quadratic Gaussian. 2009. Tugas Akhir Jurusan Teknik Fisika ITS.
Biodata
Nama : Dinayati Rodliyah TTL : Lamongan, 18 Juni 1988 Alamat : Kenduruan I/39 Lamongan Email : commadeena@yahoo.co.id HP : 085655337031
Riwayat Pendidikan:
2006 – Skrg : S1 Jurusan Teknik Fisika ITS Surabaya 2003 – 2006 : SMA Negeri 2 Lamongan