Aplikasi radar menggunakan Arduino Uno , Ultrasonic Sensor,servo motor dan MATLAB 2016 untuk pelajaran Teknologi Radar di STT Nusa Putra SUkabumi
Marina Artiyasa.ST.MT Electronics D3
Universitas Nusa Putra
Abstract
Radar adalah sebuah alat yang dapat mengetahui keberadaan suatu object di sekitarnya, aplikasi radar banyak macam misalnya pada militer pada polisi, perikanan , pertanahan dan banyak lagi , pada kesempatan ini percobaan digunakan untuk membuktikan bahwa radar dapat mendeteksi objek yang ada di depannya untuk praktek di mata pelajaran teknologi radar di semester 5 stt nusa putra, komponen yang digunakan adalah Arduino uno , motor servo sebagai penggerak dan sensor ping ultrasonic sebagai alat pendeteksi benda, dengan cara memantulkan gelombang ultrasonic ke benda dan kemudian kembali lagi dan software Arduino digunakan untuk memprogram motor servo dan sensor ping ultrasonic dan matlab digunakan sebagai alat untuk melihat gambaran radar secara visual benda di depan secara real time, dari percobaan didapatkan hasil bahwa alat ini berhasil didapatkan dengan jarak maksimal 3 meter dan minimal 2 cm , alat berjalan dengan lancar dan baik walau terkadang ada masalah sedikit di software Arduino dan matlab tapi setelah diulang semua berjalan lancar.mahasiswa pun yang belajar pelajaran teknologi radar merasa puas
I.Pendahuluan
Radar yang dibuat disini adalah untuk pembelajaran mahasiswa Teknik elekto STT Nusa Putra Sukabumi saat belajar teknologi Radar, sehingga menyerupai tampilan aslinya, namun terbatas dalam jarak dan kemampuan ,
II.. Metode Penelitian yang digunakan adalah
1.Studi Literatur , dari berbagai jurnal dan buku yang berhubungan dengan tulisan ini
2.Simulasi , menggunakan matlab 2016 dan Arduino
3.Observasi , mengamati
4. Evaluasi ,
III.Alat Bahan dan Cara
Step 1: Components
Motor
servo Matlab
gui Arduino Uno
▸ Baca selengkapnya: vrm radar adalah
(2)Components :
1 - Arduino Uno
2 - Ultrasonic Distance Sensor ( link : https://www.parallax.com/product/28015). Sensor ini merupakan sensor ultrasonik siap pakai, satu alat yang berfungsi sebagai
pengirim, penerima, dan pengontrol gelombang ultrasonik. Alat ini bisa digunakan untuk
mengukur jarak benda dari 2cm - 4m dengan akurasi 3mm. Alat ini memiliki 4 pin, pin Vcc, Gnd, Trigger, dan Echo. Pin Vcc untuk listrik positif dan Gnd untuk ground-nya. Pin Trigger untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda.
Cara menggunakan alat ini yaitu: ketika kita memberikan tegangan positif pada pin Trigger selama 10uS, maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan frekuensi 40kHz. Selanjutnya, sinyal akan diterima pada pin Echo. Untuk mengukur jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika
mengirim dan menerima sinyal digunakan untuk menentukan jarak benda tersebut. Rumus untuk menghitungnya sudah saya sampaikan di atas. Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik).
Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba. Bunyi ultrasonik nisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
HC-SR 04 Timing Diagram
Cara Kerja Sensor Ultrasonik
permukaan target, maka target akan
memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterima.
Gambar cara kerja sensor ultrasonik dengan transmitter dan receiver (atas), sensor ultrasonik dengan single sensor yang berfungsi sebagai transmitter dan receiver sealigus
Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan
kecepatan sekitar 340 m/s. Ketika
menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung
berdasarkan rumus :
S = 340.t/2
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran
gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
Aplikasi Sensor Ultrasonik
Dalam bidang kesehatan, gelombang ultrasonik bisa digunakan untuk melihat organ-organ dalam tubuh manusia seperti untuk mendeteksi tumor, liver, otak dan menghancurkan batu ginjal. Gelombang ultrasonik juga dimanfaatkan pada alat USG (ultrasonografi) yang biasa digunakan oleh dokter kandungan.
Dalam bidang industri, gelombang ultrasonik digunakan untuk mendeteksi keretakan pada logam, meratakan campuran besi dan timah, meratakan campuran susu agar homogen, mensterilkan makanan yang diawetkan dalam kaleng, dan membersihkan benda benda yang sangat halus. Gelombang ultrasonik juga bisa digunakan untuk mendeteksi keberadaan mineral maupun minyak bumi yang tersimpan di dalam perut bumi.
Dalam bidang pertahanan, gelombang ultrasonik digunakan sebagai radar atau navigasi, di darat maupun di dalam air. Gelombang ultrasonik digunakan oleh kapal pemburu untuk
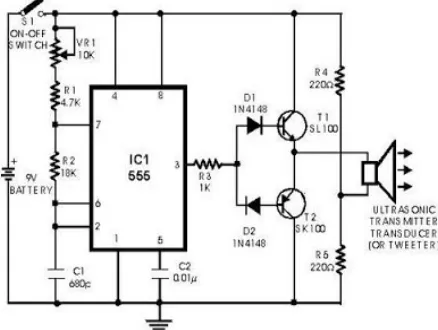
Rangkaian Sensor Ultrasonik Piezoelektrik
Piezoelektrik berfungsi untuk mengubah energi listrik menjadi energi mekanik. Bahan
piezoelektrik adalah material yang memproduksi medan listrik ketika dikenai regangan atau tekanan mekanis. Sebaliknya, jika medan listrik diterapkan, maka material tersebut akan
mengalami regangan atau tekanan mekanis. Jika rangkaian pengukur beroperasi pada mode pulsa elemen piezoelektrik yang sama, maka dapat digunakan sebagai transmitter dan reiceiver. Frekuensi yang ditimbulkan tergantung pada osilatornya yang disesuiakan frekuensi kerja dari masing-masing transduser. Karena kelebihannya inilah maka tranduser piezoelektrik lebih sesuai digunakan untuk sensor ultrasonik.
Transmitter
Transmitter adalah sebuah alat yang berfungsi sebagai pemancar gelombang ultrasonik dengan frekuensi tertentu (misal, sebesar 40 kHz) yang dibangkitkan dari sebuah osilator. Untuk
menghasilkan frekuensi 40 KHz, harus di buat sebuah rangkaian osilator dan keluaran dari osilator dilanjutkan menuju penguat sinyal. Besarnya frekuensi ditentukan oleh komponen RLC / kristal tergantung dari disain osilator yang digunakan. Penguat sinyal akan memberikan sebuah sinyal listrik yang diumpankan ke piezoelektrik dan terjadi reaksi mekanik sehingga bergetar dan memancarkan
gelombang yang sesuai dengan besar frekuensi pada osilator.
Gambar rangkaian dasar dari transmitter ultrasonik
Receiver
Receiver terdiri dari transduser ultrasonik menggunakan bahan piezoelektrik, yang berfungsi sebagai penerima gelombang pantulan yang berasal dari transmitter yang dikenakan pada permukaan suatu benda atau gelombang langsung LOS (Line of Sight) dari transmitter. Oleh karena bahan piezoelektrik memiliki reaksi yang reversible, elemen keramik akan membangkitkan tegangan listrik pada saat gelombang datang dengan frekuensi yang resonan dan akan menggetarkan bahan piezoelektrik tersebut.
Gambar rangkaian dasar receiver sensor ultrasonik
3- Servo Motor.SG90
9 g Micro Servo
Tiny and lightweight with high output power. Servo
can rotate approximately 180 degrees
(90 in each direction), and works just like the standard kinds but smaller
. You can use any servo code, hardware or library to control these servos. Good for beginners who want to make
feedback & gear box, especially since it will fit in small places. It comes with a 3 horns (arms) and hardware.
Specifications
Weight: 9 g
Dimension: 22.2 x 11.8 x 31 mm approx.
Stall torque: 1.8 kgfcm
Operating speed: 0.1 s/60 degree
Operating voltage: 4.8 V (~5V)
Dead band width: 10 μs
Temperature range: 0 ºC – 55 ºC
Step 2: Wiring and Connections
1- Connect Ultrasonic sensor (5V and GND) to Arduino (5V and GND).
2- Connect Ultrasonic sensor (SIG) to Arduino (Digital pin 8).
3- Connect Servo motor (5V and GND) to Arduino (5V and GND).
4- Connect Servo motor (SIG) to Arduino (Digital pin 9).
5- Connect Arduino Uno to your Computer using USB cable.
Step 3: Coding
There are two code files attached in this step : The first one for Arduino and the other of MATLAB.
for Arduino code : #include <Servo.h>
Servo myservo;
int pos = 1;
long duration, inches, cm=0;
const int pingPin = 8;
int st=0;
void setup()
{
Serial.begin(9600);
myservo.attach(9);
}
void loop()
{
if (pos == 1)
st = 0;
if (pos == 180)
st = 1;
if (st==0)
pos = pos+1;
if (st==1)
pos = pos-1;
myservo.write(pos);
data();
delay(30);
}
void data()
{
pinMode(pingPin, OUTPUT);
digitalWrite(pingPin, LOW);
delayMicroseconds(2);
digitalWrite(pingPin, HIGH);
delayMicroseconds(5);
digitalWrite(pingPin, LOW);
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
if (cm>300)
{
cm = 300;
}
}
long microsecondsToInches(long microseconds)
{
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds)
{
return microseconds / 29 / 2;
}
For matlab code
clc;
clear all;
%Customize graph
figure('units','normalized','outerposition',[0 0 1 1]);
whitebg('black');
%Draw Scale Data
th = linspace(0,pi,1000);
R = 10:10:100;
for i=1:length(R);
x = R(i)*cos(th);
y = R(i)*sin(th);
plot(x,y,'Color', [0.603922 , 0.803922 , 0.196078] ,'LineWidth',1);
hold on;
end
%Draw Axis data
x0 = [0 100 0 0 0 0 ]; x1 = [0 100 86.60 50 -50 -86.60]; y0 = [0 0 0 0 0 0]; y1 = [100 0 50 86.60 86.60 50];
for i=1:length(x0);
hold on;
plot([x0(i),x1(i)],[y0(i),y1(i)] ,'Color', [0.603922 , 0.803922 , 0.196078],'LineWidth',2);
end
%Draw Sonar default data
for i=1:180
hold on;
[x, y] = pol2cart(i*0.0174532925, 100);
h(i) = plot([0,x],[0,y],'g','LineWidth',1);
end
%define serial port
s1 = serial('COM3');
s1.BaudRate=9600;
fopen(s1);
while(1)
data = fscanf(s1);
[th, r] = strtok(data);
th = real(str2num(th));
r = str2num(r);
set(h(th),'color','r');
[x0, y0] = pol2cart(th*0.0174532925, 100);
[x, y] = pol2cart(th*0.0174532925, r);
set(h(th),'XData',[x0,x]);
set(h(th),'YData',[y0,y]);
m = plot([0,x0],[0,y0],'r','LineWidth',3);
drawnow
delete(m);
end
fclose(s1);
NOTE : Before closing MATLAB, close the serial port by writing "s1.close()" in MATLAB
workspace.
Hasil dan Pembahasan :
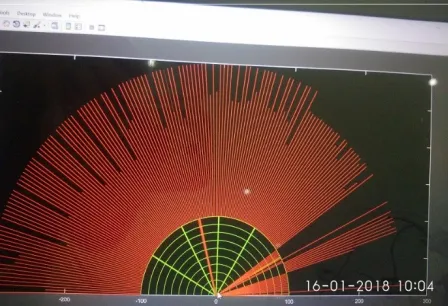
Gambar radar ultrasonic
Hasil tampilan matlab gui untuk radar
Pada arduiono program dipakai untuk menggerakkan servo dan untuk mengatur sensor ultrasonic sehingga bisa mendeteksi objek sesuai jarak sampai terjauh 3 m , dan bentuk benda sedangkan untuk matlab program dipakai untuk membuat plot atau gambar sesuai objek yang ada persis seperti tampilan pada radar .Pada saat percobaan com port yang dipakai Arduino adalah com port 3.
KESIMPULAN:
Radar ultrasonic dapat digunakan untuk jarak terbatas maksimal 3 m sesuai setting, dan harganya cukup murah untuk praktek
mahasiswa, hanya membutuhkan Arduino uno , motor servo dan sensor ultrasonic dan hanya membutuhkan komponen yang minimal , untuk jarak yang lebih jauh mungkin bias
dikembangkan lebih lanjut.Kekurangan yang ada yaitu alat ini susah menyusunnya karena kabel-kabel Arduino , jadi harus dirancang lebih rapi .
DAFTAR PUSTAKA
1.N. Anju Latha1, Distance Sensing with Ultrasonic Sensor and Arduino,2016, International Journal of Advance Research, Ideas and Innovations in Technology, India ISSN: 2454-132X (Volume2, Issue5) 2.Akshay Bochare1, Mukesh Saini2, Short
Range Radar System using Arduino Uno,2017, International Research Journal of Engineering and Technology (IRJET), India. Volume: 04 Issue: 10 | Oct -2017
3.Aditi Jain, Arduino Based Ultrasonic Radar System using Matlab,2017, International Journal for Research in Applied Science & Engineering