1
Kursi Roda dengan Kontrol Sinyal EMG dilengkapi dengan Rangkaian
Safety (Parameter EMG)
Aulia Sofura Putri, Dr. Endro Yulianto ST., MT., Dr. I Dewa Gede Hari W.,ST., MT. Jurusan Teknik Elektromedik
POLITEKNIK KESEHATAN KEMENTRIAN KESEHATAN SURABAYA Abstrak
Kursi roda merupakan sebuah alat bantu yang digunakan oleh orang yang mengalami kesulitan beraktifitas menggunakan kaki,. Alat ini dapat digerakan dengan didorong oleh orang lain, digerakan dengan menggunakan tangan, atau dengan menggunakan mesin otomatis. Pada perkembangan zaman modern seperti ini telah banyak dikembangkan kursi roda ini dengan berbagai macam kendali, mulai dari yang awalnya masih manual yaitu dengan cara didorong oleh orang lain atau menggunakan tangan untuk memutar roda hingga yang otomatis seperti menggunakan joystick dan kendali Electromyograph.
Pada kenyataannya kursi roda ini masih terbatas dalam penggunaannya, karena kursi roda hanya bisa digunakan oleh penyandang cacat kaki yang masih bisa menggerakkan tangannya untuk menggerakkan roda atau mengendalikan joystick menggerakkan gerakan kursi roda tersebut. Sedangkan untuk penyandang cacat tangan dan kaki akan lebih dimudahkan apabila kontrol kursi roda tersebut menggunakan sinyal EMG. Sinyal EMG yang digunakan merupakan sadapan dari otot-otot yang masih bisa digerakkan ketika otot-otot bagian tangan dan kaki bermasalah. Dari hasil pengukuran tingkat eror pada alat “Kursi Roda dengan Kontrol Sinyal Otot”. (Parameter EMG) di dapatkan tingkat eror sebesar 0,6% pada rangkaian sadapan EMG..
Kata kunci : Kursi roda, Electromyograph
PENDAHULUAN
Kecacatan merupakan kondisi biologis
individual seseorang berkaitan dengan keterbatasan fungsi organ yang disebabkan adanya kerusakan secara psikis, mental, dan sensorik. Sedangkan disabilitas, melihat keterbatasan atau hilangnya kesempatan individu untuk berpartisipasi dalam kehidupan sehari-hari di masyarakat, bukan saja semata-mata karena gangguan fisik atau psikis, melainkan juga akibat
adanya halangan-halangan sosial yang turut
berkontribusi. Disabilitas juga dipandang memiliki relasi berkesinambungan antara gangguan fisik individual dengan lingkungan sosialnya. Pada suatu saat tertentu individu akan menjadi “disable”, tetapi pada situasi lain, orang dengan disabilitas dapat berfungsi sebagaimana biasanya. Oleh karena itu, ketika halangan-halangan fisik dan lingkungan dapat dihilangkan, maka seseorang sudah tidak dapat dikatakan disable, karena sudah mampu melaksanakan fungsinya. (Buletin Jendela Data dan Informasi Kesehatan Kemenkes RI, 2014)
Terminologi “handicapped” dipahami sebagai kondisi orang dengan disabilitas yang mengalami hambatan untuk melakukan aktivitas yang penting
baginya. Hambatan tersebut harus merupakan
kombinasi antara kondisi internal (impairment) dan faktor eksternal (seperti kondisi moda transportasi yang
tidak dapat dilalui oleh kursi roda). Kedua persyaratan tersebut harus terpenuhi untuk menyatakan orang
dengan disabilitas berada dalam kondisi
“handicapped”.
Dengan demikian, penggunaan kata
“disabilitas” didalam peraturan perundang-undangan Indonesia, memiliki spektrum yang lebih luas, bukan semata-mata penghalusan dari frase penyandang cacat atau kecacatan. Penggunaan terminologi disabilitas
bertujuan untuk mengajak seluruh pemangku
menyelami isu disabilitas dengan mengidentifikasi dan
menganalisis kausalitas antara faktor internal
(gangguan fungsional) dan eksternal (hambatan sosial) orang dengan disabilitas.
Menurut hasil Survey Sosial Ekonomi Nasional (Susenas) yang dilaksanakan Biro Pusat Statistik (BPS) tahun 2012, jumlah penyandang disabilitas di Indonesia sebanyak 6.008.661 orang. Dari jumlah tersebut sekitar 1.780.200 orang adalah
penyandang disabilitas netra, 472.855 orang
penyandang disabilitas rungu wicara,402.817 orang penyandang disabilitas grahita/intelektual, 616.387 orang penyandang disabilitas tubuh, 170.120 orang penyandang disabilitas yang sulit mengurus diri sendiri, dan sekitar 2.401.592 orang mengalami disabilitas ganda.
2
Pemerintah sendiri mempunyai program agar orang yang menyandang disabilitas atau cacat dapat mandiri mengurus hidupnya. Hal ini menjadikan suatu peluang bagi peneliti untuk membantu program tersebut. Orang cacat yang lumpuh serta tidak mempunyai lengan akan bergantung kepada orang lain untuk mobilitasnya sehingga mereka membutuhkan kursi roda yang digerakkan oleh sesuatu di dalam tubunya. Salah satunya yaitu dengan memanfaatkan biosinyal khususnya sinyal bioelektrik.
Sinyal bioelektrik adalah sinyal elektrik yang dihasilkan oleh tubuh. Dengan adanya gerakan tubuh baik secara periodik maupun non periodik, yang membangkitkan sinyal elektrik dapat dimanfaatkan dalam bidang medis/kesehatan. Beberapa macam sinyal bioelektrik yaitu EEG, EOG dan EMG. Ketiga sinyal tersebut selaa ini hanya dimanfaatkan untuk keperluan diagnostik, padahal sinyal tersebut dapat diaplikasikan untuk mengerakkan kursi roda. EOG jika digunakan untuk mengerakkan kursi roda terdapat kesulitan yaitu pengguna harus mengerakkan bola mata ke arah kanan jika dia ingin berbelok ke kanan. Hal ini menyulitkan pengguna untuk tetap fokus ke arah depan. Pada EEG juga terdapa kesulitan, pengguna harus tetap fokus untuk mengontrol kursi roda agar bergerak sesuai dengan keinginan. Dalam EEG akan ada banyak gangguan sinyal jika pengguna tidak benar-benar fokus.
Peneliti akan mencoba menggunakan sinyal EMG untuk menggerakkan kursi roda. Dengan EMG maka kontrol kursi roda akan lebih praktis sebab sinyal ini tidak mudah terganggu oleh sinyal-sinyal lain. Untuk kontrol kursi roda sendiri terdapat 4 sadapan yang bisa diletakkan dimanapun dengan syarat otot tersebut
masih dapat digerakkan, ini berfungsi untuk
pergerakkan maju, mundur, kanan dan kiri.
Kursi roda sebelumnya telah dikembangkan oleh Prayuda Ali 2013 dengan judul “Kursi Roda
dengan Kontrol Sinyal Otot”. Pada alat tersebut
dikhususkan untuk penyandang cacat kaki dan juga cacat telapak tangan. Jika digunakan oleh seseorang yang cacat kaki dan tangan akan mengalami kesulitan dalam penyadapan sinyal EMG. Pada tahun 2014 alat ini dikembangkan oleh Tri Waluyo Jati dengan judul
“Kursi Roda dengan Kontrol Sinyal Otot Berbasis Mikrokontroller ATmega16”. Alat tersebut sudah
menggunakan sadapan pada lengan atas tetapi masih tidak bisa digunakan untuk orang yang otot lengannya mengalami cacat.
Berdasarkan hasil identifikasi masalah di atas, maka penulis akan membuat alat Kursi Roda Dengan Kontrol Sinyal EMG dilengkapi Rangkaian Safety yang merupakan penyempurnaan dari alat yang telah dibuat sebelumnya.
BATASAN MASALAH
1) Ruang gerak kursi roda pada daerah datar 2) Sadapan sinyal EMG pada otot yang masih
bisa digerakkan
3) Alat dapat melakukan gerakan belok kanan, belok kiri, mundur dan maju
4) Menggunakan mikrokontroller AVR ATMega 8535
5) Tidak membahas mekanik kursi roda 6) Berat badan pasien maksimal 100kg
RUMUSAN MASALAH
Dapatkah dibuat Kursi Roda Dengan Kontrol Sinyal EMG dilengkapi Rangkaian Safety (Parameter EMG)?
TUJUAN PENELITIAN
1) Tujuan Umum
Dibuatnya Kursi Roda Dengan Kontrol Sinyal EMG dilengkapi Rangkaian Safety (Parameter EMG)
2) Tujuan Khusus
a) Membuat rangkaian instrument amplifier
b) Membuar rangkaian minimum system
ATMega8535
c) Membuat program kontrol d) Membuat mekanik motor e) Membuat kontrol motor f) Membuat driver motor
MANFAAT PENELITIAN
1)
Manfaat TeoritisUntuk menambah pengetahuan mahasiswa Teknik Elektromedik mengenai alat life support terutama
Kursi roda dengan kontrol sinyal EMG.
2) Manfaat Praktis
Membantu individu dengan keterbatasan gerakan (khususnya bagi mereka yang tidak mempunyai telapak tangan dan kaki) sehingga tidak mengalami kesulitan dalam mengoperasikan kursi roda standar.
TINJAUAN PUSTAKA
Electromyograph
Surface EMG merupakan pengambilan sinyal
otot dari permukaan kulit, sistem EMG elektronik menggunakan teknik umpan balik untuk membatalkan perubahan frekuensi yang sangat rendah (dc ke pecahannya dari Hz) dalam memperoleh sinyal fisiologis (Instrumentasi Medis, 2012). Signal ini
3
rentan frekuensinya sangat rendah dapat timbul sebagai akibat dari gerakan artifact fenomena. Sinyal yang sungguh bebas dari kebisingan karena kulit atau kabel bergerak dan menawarkan dasar yang sangat stabil. Dalam Noraxon paten dari sistem informasi dilakukan oleh keseluruhan sinyal secara efektif menjadi sebuah "emg hanya" komponen dan frekuensi rendah "motion artifact" komponen. Artifact komponen gerakan yang secara harfiah adalah subtracted dari keseluruhan sinyal yang memungkinkan hanya emg sinyal yang akan dioutputkan.
Permukaan electromyography (EMG) adalah rekaman dari otot tindakan dengan potensi permukaan kulit electrode, digunakan sebagai indikator otot rekrutmen. sEMG digunakan oleh therapists fisik pada gerakan fungsi otot serta digunakan untuk distribusi probabilitas amplitudo pada waktu otot dibebani dan menganalisis gap pada waktu otot istirahat. Salah satu contoh fungsi dari EMG adalah dalam bidang ergonomi.
Electromiography (EMG) adalah teknik untuk
memeriksa dan merekam aktivitas sinyal otot. EMG dilakukan dengan instrumen bernama elektromiograf,
untuk menghasilkan rekaman bernama
elektromiogram. Elektromiograf mendetekasi potensi listrik yang dihasilkan oleh sel otot ketika otot ini aktif dan ketika sedang beristirahat.
Karakteristik Sinyal EMG
Amplitudo dari sinyal EMG stokastik (acak) di alam dan dapat cukup diwakili oleh fungsi distribusi Gausian. Amplitudo sinyal berkisar 0-10 mV (puncak ke puncak) atau 0-1,5 mV (rms). Energi yang dapat dimanfaatkan sinyal terbatas 0 hingga 500 Hz frekuensi kisaran, dengan energi yang dominan berada di kisaran 50-150 Hz. (Wikipedia, 2011).
METODOLOI
Blok Diagram Mekanis
Gambar 2 Blok Diagram Mekanis
Blok Diagram
Gambar 3 Blok Diagram Rangkaian
Cara Kerja Blok Diagram
Sensor ultrasonic merupakan komponen yang
digunakan untuk mendeteksi jarak antara kursi roda dengan halangan. Alat ini menggunakan dua buah sensor ultrasonic yaitu pada bagian depan kursi roda dan bagian belakang kursi roda. Sensor ultrasonic dalam alat ini digunakan sebagai safety agar kursi roda tidak mengalami tabrakan dengan halangan saat sedang dioperasikan. Rangkaian minimum sistem merupakan rangkaian pengolah data dari sensor ultrasonic, dan sebagai pengatur putaran motor servo. Motor servo merupakan komponen yang digunakan untuk mencari halangan dengan cara berputar pada sudut 45, 90, dan 135 derajat. Driver motor (L) digunakan untuk menggerakan Motor (L) setelah driver motor mendapat logika hight dari minimum system. Sedangkan driver motor (R) digunakan untuk menggerakkan Motor (R) setelah driver motor mendapat logika hight dari minimum system. Rem digunakan untuk menghentikan motor ketika sensor ultrasonic telah mendeteksi halangan.
4 Diagram Alir
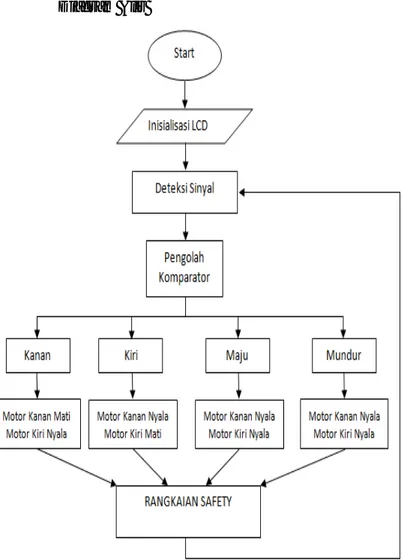
Gambar 4 Diagram Alir
Saat modul dinyalakan maka arus listrik mengalir ke semua rangkaian. Kemudian 4 sadapan EMG yang akan diolah komparator. Jika dalam komparator terdeteksi sinyal EMG kanan yang lebih besar maka kursi akan menyalakan motor kiri dan motor kan mati seingga kursi roda berbelok ke kanan. Jika komparator mendeteksi sinyal EMG kiri yang lebih besar maka akan menyalakan motor kanan dan motor kiri mati sehingga kursi roda berbelok ke arah kiri. Jika sinyal EMG depan yang lebih besar maka kursi roda akan bergerak maju, ketika EMG belakang yang lebih besar maka kursi roda akan bergerak mundur.
Seluruh sistem akan dibatasi oleh rangkaian safety
yang akan mendeteksi adanya halangan.
Saat pertama alat dihidupkan atau dioperasikan, alat akan menginisialisasikan semua sistem kerja dari input dan output kontroller. Dalam selang waktu beberapa detik, alat mulai mendeteksi sinyal denyut aliran darah pada daun telinga. Untuk memulai perhitungan, kemudian ditekan tombol start dan alat akan memulai perhitungan BPM. Jika sudah terdeteksi 10 pulse, maka nilai BPM mulai dihitung kemudian akan ditampilkan dan diproses untuk siap dikirim melalui Port Tx. Port Tx telah terhubung dengan modul bluetooth untuk bisa mengirim data jarak jauh, maksimal 10 meter. Jika data/nilai BPM tidak dikirim atau proses pengiriman dihentikan, akan kembali pada proses awal yaitu proses pendeteksian sinyal denyut aliran darah.
HASIL DAN ANALISA DATA Hasil
1) Hasil Pengukuran BPM Modul dan BPM Pembanding (Patient Monitor)
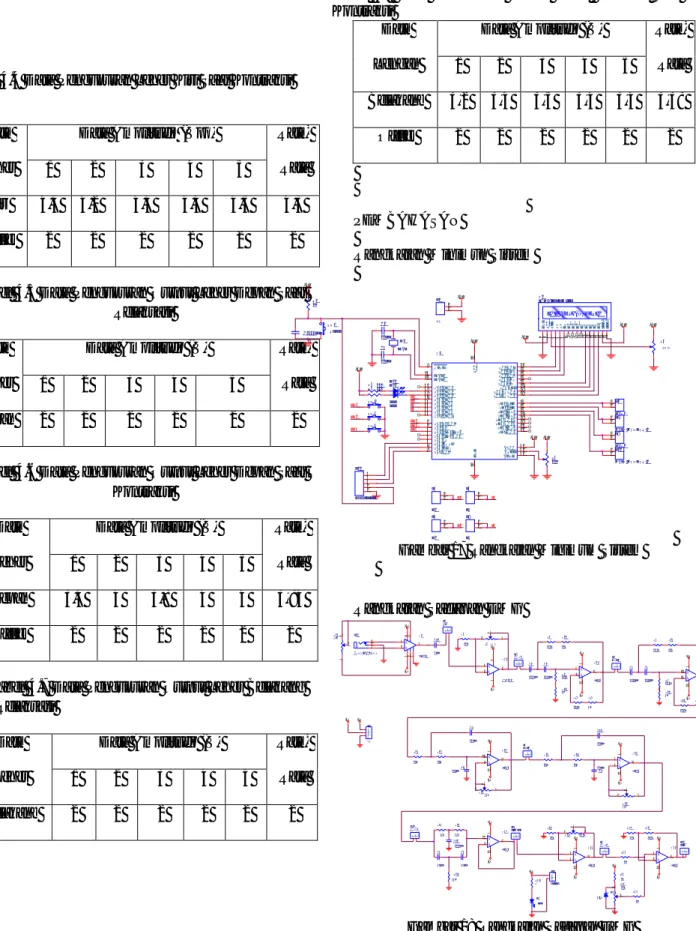
Tabel 4.1 Data Pengukuran Output Leher Kanan
Saat Relaksasi
Data Leher
Data Amplitudo (V) Rata
- Rata
1 2 3 4 5
Kanan 2 2 2 2 2 2
Tabel 4.2 Data Pengukuran Output Leher Kanan Saat
Kontraksi
Data Leher
Data Amplitudo (V) Rata-
Rata
1 2 3 4 5
Kanan 4,5 4,4 4,5 4,4 4,4 4,4
Offset 2 2 2 2 2 2
Tabel 4.3 Data Pengukuran Output Leher Kiri Saat
Relaksasi
Data Leher
Data Amplitudo (V)
Rata-Rata
1 2 3 4 5
5
Tabel 4.4 Data Pengukuran Leher Kiri Saat Kontraksi
Data Leher
Data Amplitudo (Vpp) Rata-
Rata
1 2 3 4 5
Kiri 4,4 4,2 4,4 4,4 4,5 4,3
Offset 2 2 2 2 2 2
Tabel 4.5 Data Pengukuran Output Leher Depan Saat
Relaksasi
Data Leher
Data Amplitudo (V) Rata-
Rata
1 2 3 4 5
Depan 2 2 2 2 2 2
Tabel 4.6 Data Pengukuran Output Leher Depan Saat
Kontraksi
Data Leher
Data Amplitudo (V) Rata-
Rata
1 2 3 4 5
Depan 3,4 4 3,8 4 4 3,84
Offset 2 2 2 2 2 2
Tabel 4.7 Data Pengukuran Output Leher Belakang
Saat Relaksasi
Data Leher
Data Amplitudo (V) Rata-
Rata
1 2 3 4 5
Belakang 2 2 2 2 2 2
Tabel 4.8 Data Pengukuran Output Leher Belakang Saat
Kontraksi
Data Lengan
Data Amplitudo (V) Rata-
Rata
1 2 3 4 5
Belakang 3,2 3,4 3,5 3,4 3,4 3,38
Offset 2 2 2 2 2 2
PEMBAHASAN
Rangkaian Minimun Sistem
R 5 220 R 6220 +5v e1 C3 22pF J8 E4 1 2 e4 J2 GAS1 1 2 e3 SW1 Reset D10 LED R1 1K e3 J6 E3 1 2 +5v Y 1 XTAL sw2 +5v R3 20K +5v J9 GAS2 1 2 e4 J1 PS 1 2 J11 Downloader 1 2 3 4 5 sw3 J7 MAJU MUN DUR 1
1 2 LCD ALPHANUMERIC U2 LCD Alphanum eric 5 4 3 8 2 1 67 910112113141516 R W R S V E E D 1 V C C G N D D 2 E ND0 D3D45DD6D7LED+ L E D -sw3 sw1 D11 LED +5v +5v e2 U1 16 4 28 36 19 9 27 38 29 6 22 33 1 20 40 34 8 17 3 14 32 5 13 26 18 37 24 2 39 23 35 25 21 7 15 12 30 31 10 1 1 PD2/ I NT0 PB3/ AI N1/OC0 PC 6/TOSC 1 PA4/ ADC 4 PD 5/ OC 1A R ESET PC5/ TDI
PA2/ ADC 2 PC 7/TOSC 2
PB5/ MOSI PC0/SC L PA7/ ADC 7 PB0/ T0/SC K PD6/ IC P1 PA0/ ADC 0 PA6/ ADC 6 PB7/ SCK PD3/ I NT1 PB2/ AI N0/I NT2 PD 0/RXD AREF PB4/ SS XTAL1 PC 4/TDO PD 4/ OC 1B PA3/ ADC 3 PC2/TC K PB1/ T1 PA1/ ADC 1 PC 1/SD A PA5/ ADC 5 PC3/TMS PD 7/OC 2 PB6/ MI SO PD1/ TXD XTAL2 AVCC AGND V C C G N D C2 22pF SW2 SW3 C1100nF +5v J10 MAJU MUN DUR 2
1 2 sw1 J3 E1 1 2 e2 +5v SW4 R4 POT e1 J5 E2 1 2 sw2 +5v
Gambar 17 Rangkaian Minimum Sistem
Rangkaian Sadapan EMG
R12 5K R29 10 0k 1 3 2 R9 5K +5V -5V + -U2 A TL084 3 2 1 4 11 R10 220K D4 LED +5V C9 10nF C6 47nf R2 4 27k -5V J6 CON2 12 +5V + -U2D TL084 12 13 14 4 11 J 90 CON2 12 J2 HPF1 12 R4 22 .5k R33 1k J 3 HPF2 12 -5V +5V C8 10 nF R17 33K R16 54k 1 3 2 R1 1 5K J9 CON2 12 -5V + -U5C TL0 84 10 9 8 4 1 1 R32 100k J12 out 12 -+ U4A CA3240 3 2 1 8 4 + -U1 AD620 2 6 7 4 8 1 3 5 + -U2C TL0 84 10 9 8 4 1 1 R23 12k R26 27 k R2 5 27k J7 cla mper 12 J8 PS 1 2 3 R6 POT 1 3 2 +5 V C11 1 nF +5V J4 LPF1 12 R15 68k R20 54k 1 3 2 -5 V +5V +5V C3 47nf J14 bat rey 1 2 -5V R18 10k D3 3,6V -5V C2 10 0nF R22 12k C12 100n f R31 1 0k C1 0 10nF R30 10k 1 3 2 R3 4 1K -5V R3 6 1K R1 220k C7 10nF R3 7 R R7 68k R13 RG1 3 2 +5V R8 220K -5V J10 CONN J ACK PWR 1 2 3 + -U2B TL084 5 6 7 4 11 + -U5B TL0 84 5 6 7 4 11 J1 BI 12 C1 100 nF +5V +5V R3 10K R21 5K R27 27k + -U5A TL084 3 2 1 4 11 C4 1 00nF R5 10 0k -5V C5 100nF +5V R2 100k
Gambar 18 Rangkaian Sadapan EMG
Rangkaian sadapan EMG terdiri dari instrument IC AD620 kemudian sinyal akan dikuatkan pada penuatan non inverting, sinyal kemudian masuk pada
6
filter HPF 20Hz, LPF 500Hz dan notch filter 50Hz sehinggga sinyal lain selain sinyal otot akan diredam.
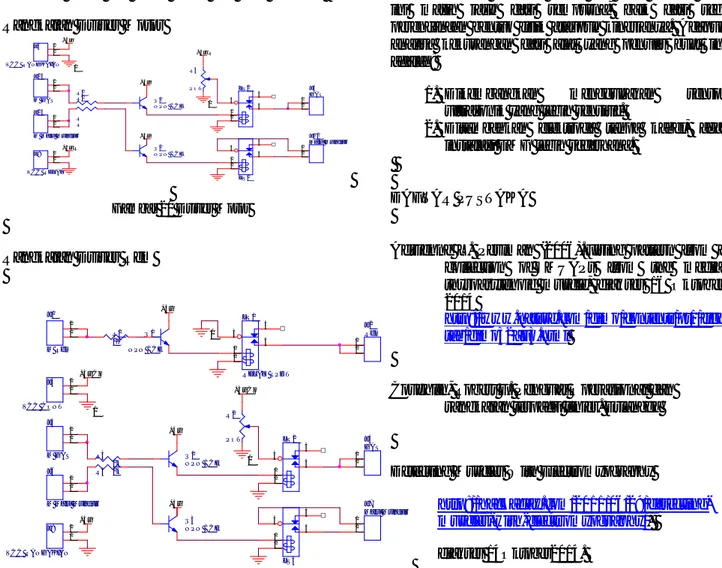
Rangkaian Driver Motor
R5 POT J4 GAS 1 2 J12 Maju Mundur 1 2 J6 VCC RANGKAIAN 1 2 R2 R +5v +5v R Q2 NPN BCE J14 M GAS 1 2 LS1 3 5 4 1 2 +5v J15 M Maju Mundur 1 2 +5v J8 VCC RELAY 1 2 R1 R LS2 3 5 4 1 2 Q1 NPN BCE +5v R 0 0
Gambar 20 Driver Motor
Rangkaian Driver Rem
Q1 NPN BCE 0 LS1 RELAY SPDT 3 5 4 1 2 0 J2 Rem 1 2 J6 M Maju Mundur 1 2 +5v Co +5v R2 POT +5v +5v J8 VCC RANGAKIAN 1 2 R1 1K 0 J7 Maju Mundur 1 2 J5 GAS 1 2 Q2 NPN BCE R4 1k J1 M Rem 1 2 J3 VCC CONT 1 2 +5v Co +5v LS2 3 5 4 1 2 J4 M GAS 1 2 Q3 NPN BCE LS3 3 5 4 1 2 R3 1k
Gambar 21 Rangkaian Driver Rem
Kesimpulan
Setelah melakukan proses pembuatan dan study literatur serta perencanaan, pengujian alat dan pendataan, maka penulis dapat menyimpulkan sebagai berikut :
1. Rangkaian sadapan EMG sudah dapat berfungsi dengan baik dan sensitif terhadap gerakan otot.
2. IC ATMega 8535 dapat mengontrol sistem dengan baik sehingga alat dapat bekerja sesuai keinginan.
3. Dapat dibuatnya program kontrol sesuai diagram alir alat sehingga modul dapat bekerja sesuai perintah.
4. Mekanik motor dapat difungsikan dengan lancar sesuai perintah sehingga modul dapat bergerak maju dan belok serta mundur dengan baik..
Saran
Karena berbagai faktor alat yang penulis buat ini masih jauh dari sempurna, baik dari segi perencanaan bentuk fisik ataupun kinerjanya. Adapun analisa kekurangan dari alat yang penulis buat ini adalah:
1. Dikembangkan menggunakan sensor
ultrasonik yang lebih sensitif.
2. Ditambahkan elektroda tanpa kabel, agar instalasi EMG lebih sederhana.
DAFTAR PUSTAKA
Adrienne L. Perlman (2006).Firing pattern from a
collection of MUAPs from the medial thyroarytenoid muscle, diakses 16 Oktober
2014
http://www.nature.com/gimo/contents/pt1/fig_ tab/gimo32_F3.html
Coughlin, Robert F. Penguat Operasional dan rangkaian terpadu linier. Erlangga
Detecting Muscles With Electromyography
http://hackaday.com/2011/06/29/detecting-muscles-with-electromyography/,
diakses 14Oktober2014.
EMG Signal Analysis
http://www.delsys.com/educational-resources/knowledge-center/technical-notes/,
diakses 14 Oktober 2014.
EMG Sensor Placement
http://www.delsys.com/educational-resources/knowledge-center/technical-notes/,
diakses 14 Oktober 2014.
Iksal . Perancangan dan Implementasi Kursi Roda Elektrik Ekonomis Sebagai Sarana Rehabilitasi Medik. ST-INTEN
7
Kursi Roda Elektrik
http://www.kursiroda.net/Kursi-Roda-Elektrik-Listrik-Baterai-AdventureLX.htm,
diakses 16 Oktober 2014.
Konrad, Peter. 2005 . The ABC of EMG. USA. Noraxon INC.
--,--,http://pdf1.alldatasheet.com/datasheet-pdf/view/211622/UTC/60N06.html/ , diakses pada tangga 11 November 2014.
--,--,http://pdf1.alldatasheet.com/datasheet-pdf/view/211622/UTC/LM324.html/ , diakses pada tangga 11 November 2014.
--,--,http://pdf1.alldatasheet.com/datasheet-pdf/view/211622/UTC/ATMega16.html/ , diakses pada tangga 11 November 2014.
--,--,http://pdf1.alldatasheet.com/datasheet-pdf/view/211622/UTC/NE555.html/ , diakses pada tangga 11 November 2014. Informatika