1
PENGUKURAN KERJA FISIK MANUSIA DENGAN
PENDEKATAN BIOMEKANIKA
A. DESKRIPSI
Menurut Sutalaksana (1979), biomekanika merupakan salah satu dari empat bidang penelitian informasi tentang kemampuan manusia beserta keterbatasannya. Yaitu penelitian tentang kekuatan fisik manusia yang mencakup kekuatan atau daya fisik manusia ketika bekerja dan mempelajari bagaimana cara kerja serta peralatan harus dirancang agar sesuai dengan kemampuan fisik manusia ketika melakukan aktivitas kerja tersebut.
Tujuan Praktikum
a. Mampu melakukan pengukuran kerja dan memanfaatkannya dengan merancang metode kerja didasarkan pada prinsip–prinsip biomekanika. b. Mengetahui besar beban kerja pada saat melakukan kerja dengan metode
biomekanika.
c. Mampu memahami keterbatasan manusia dari beban kerja yang dibebankan pada anggota tubuh manusia.
d. Mampu mengaplikasikan metode Recommended Weight Limit (RWL) dalam menghitung beban kerja, menghitung lifting index.
e. Mampu memberikan rekomendasi beban benda yang seharusnya dapat diangkat oleh operator.
B. INPUT DAN OUTPUT Input :
1. Video proses pengangkatan 2. Foto hasil screencapture
Output :
1. Rekomendasi analisis L5/S1 2. Rekomendasi beban kerja
2 C. REFERENSI
Chaffin, D.B. et al., 1991. Occupational biomechanics, Wiley New York. Nurmianto, E., 1996. Ergonomi: Konsep Dasar dan Aplikasinya Tinjauan
Anatomi, Fisiologi, Antropometri, Psikologi, dan Komputasi untuk Perancangan, Kerja dan Produk, Jakarta: PT Guna Widya.
Sutalaksana, I.Z., Anggawisastra, R. & Tjakraatmadja, J.H., 1979. Teknik Tata Cara Kerja. ITB, Bandung.
Tayyari, F. & Smith, J.L., 1997. Occupational ergonomics: Principles and
applications, Chapman & Hall.
Winter, D.A., 1979. Biomechanics of human movement, Wiley New York.
D. LANDASAN TEORI
a) Analisis Pengukuran Mekanika Tubuh Manusia Dengan Metode Biomekanika
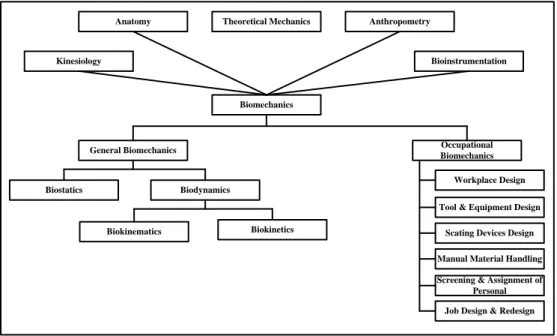
Dalam biomekanika banyak disiplin ilmu yang mendasari dan berkaitan untuk dapat menopang perkembangan biomekanik. Disiplin ilmu ini tidak terlepas dari kompleksnya masalah yang ditangani oleh biomekanik ini. Untuk lebih jelasnya dapat dilihat bagan (Gambar 1.1) di bawah ini:
Anatomy Theoretical Mechanics Anthropometry
Bioinstrumentation Kinesiology Biomechanics General Biomechanics Biostatics Biodynamics Biokinematics Biokinetics Occupational Biomechanics Workplace Design
Tool & Equipment Design
Scating Devices Design
Manual Material Handling Screening & Assignment of
Personal Job Design & Redesign
Gambar 1. 1 Diagram Ilmu Biomekanika (Contini dan Drill, 1966)
1.1 Konsep Biomekanika
Menurut Chaffin dan Anderson (1984), Biomekanika diklasifikasikan menjadi 2, yaitu:
3 a) General Biomechanics
General Biomechanics adalah bagian dari Biomekanika yang berbicara
mengenai hukum – hukum dan konsep – konsep dasar yang mempengaruhi tubuh organic manusia baik dalam posisi diam maupun bergerak. Dibagi menjadi 2, yaitu:
- Biostatics adalah bagian dari biomekanika umum yang hanya menganalisis tubuh pada posisi diam atau bergerak pada garis lurus dengan kecepatan seragam (uniform).
- Biodinamics adalah bagian dari biomekanik umum yang berkaitan dengan gambaran gerakan – gerakan tubuh tanpa mempertim-bangkan gaya yang terjadi (kinematik) dan gerakan yang disebabkan gaya yang bekerja dalam tubuh (kinetik) (Tayyari, 1997).
b) Occupational Biomechanics
Didefinisikan sebagai bagian dari biomekanik terapan yang mempelajari interaksi fisik antara pekerja dengan mesin, material dan peralatan dengan tujuan untuk meminimumkan keluhan pada sistem kerangka otot agar produktifitas kerja dapat meningkat.
Setelah melihat klasifikasi diatas maka dalam praktikum kita ini dapat kita kategorikan dalam Occupational Biomechanic. Untuk lebih jelasnya disini akan kita bahas tentang anatomi tubuh yang menjadi dasar perhitungan dan penganalisaan biomekanik.
Dalam biomekanik ini banyak melibatkan bagian bagian tubuh yang berkolaborasi untuk menghasilkan gerak yang akan dilakukan oleh organ tubuh yakni kolaborasi antara Tulang, Jaringan penghubung (Connective Tissue) dan otot yang dapat dijelaskan sebagai berikut:
a) Tulang
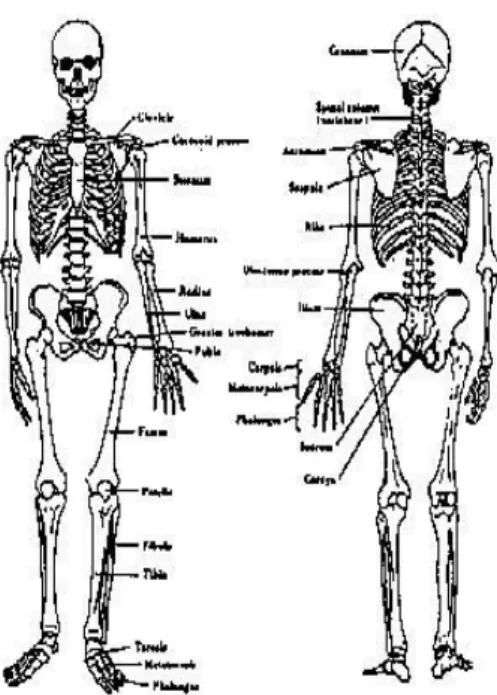
Tulang adalah alat untuk meredam dan mendistribusikan gaya/tegangan yang ada padanya. Tulang yang besar dan panjang berfungsi untuk memberikan perbandingan terhadap beban yang terjadi pada tulang tersebut. (Eko Nurmianto, 1996).
4
Gambar 1. 2 Pandangan Depan dan Belakang dari Sistem Tulang Manusia (Nurmianto, 1996)
Tulang juga selalu terikat dengan otot, dan jaringan penghubung (connective Tissue) yakni ligamen,cartilage, fascia,dan Tendon. Fungsi otot disini untuk menjaga posisi tubuh agar tetap sikap sempurna.
b) Connective Tissue atau Jaringan Penghubung a. Cartilagenous
Fungsi dari sambungan Cartilagenous adalah untuk pergerakan yang relatif kecil. Contoh: Sambungan tulang iga (ribs) dan pangkal tulang iga (sternum).
Di samping itu terdapat pula sambungan cartilagenous khusus, antara vertebrata (ruas-ruas tulang belakang) yaitu dikenal sebagai interveterbratal disc, yang terdiri dari pembungkus, dan dikelilingi oleh inti (puply core).
Verterbrae juga terdapat pada ligamen dan otot. Adanya gerakan yang
relatif kecil pada setiap jointnya, dapat mengakibatkan adanya flaksibelitas badan manusia untuk membungkuk, menengadah, dan memutar. Sedangkan disc berfungsi sebagai peredam getaran pada saat manusia bergerak baik translasi dan rotasi (Nurmianto, 1996).
5 b. Ligamen
Ligamen berfungsi sebagai penghubung antara tulang dengan tulang untuk stabilitas sambungan (joint stability) atau untuk membentuk bagian sambungan dan menempel pada tulang. Ligamen tersusun atas serabut yang letaknya tidak paralel. Oleh karenanya tendon dan ligamen bersifat inelastic dan berfungsi pula untuk menahan deformasi. Adanya tegangan yang konstan akan dapat memperpanjang ligamen dan menjadikannya kurang efektif dalam menstabilkan sambungan (joints) (Nurmianto, 1996).
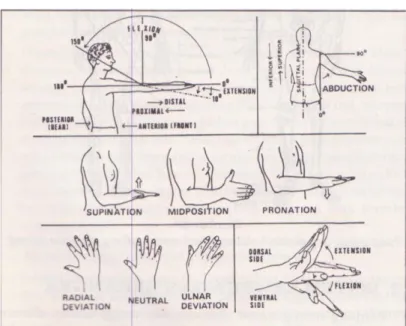
Gambar 1. 3 Gerak Tangan dan Lengan (Nurmianto, 1996)
Ligamen tersebut untuk membatasi rentang gerakan. Batasan jangkauan dapat menentukan ruang gerakan atau aktifitas yang digambarkan oleh sistem sambungan tulang. Sambungan tulang yang sederhana ada pada siku dan lutut. Dengan adanya alasan bahwa kedua adalah sambungan yang membatasi gerakan fleksi (flexion). Sambungan siku memberikan kebebasan gerak pada tulang tangan.
Lengan dan tungkai adalah sambungan yang komplek, yang mampu untuk mengadakan gerakan 3 dimensi, Contoh: gerakan mengangkat tangan, sambungan siku juga dibantu oleh sambungan bahu, pergerakan rotasi seluruh tangan pada sumbunya dan gerakan lengan tangan pada sambungan pergelangan tangannya. Tangan manusia mempunyai flesibilitas yang tinggi dalam gerakannya (Nurmianto, 1996).
6 c. Tendon
Berfungsi sebagai penghubung antara antara tulang dan otot terdiri dari sekelompok serabut collagen yang letaknya paralel dengan panjang tendon. Tendon bergerak dalam sekelompok jaringan serabut dalam sutu area dimana adanya gaya gesekan harus diminimumkan. Bagian dalam dari jaringan ini mengeluarkan cairan synovial untuk pelumasan (Nurmianto, 1996).
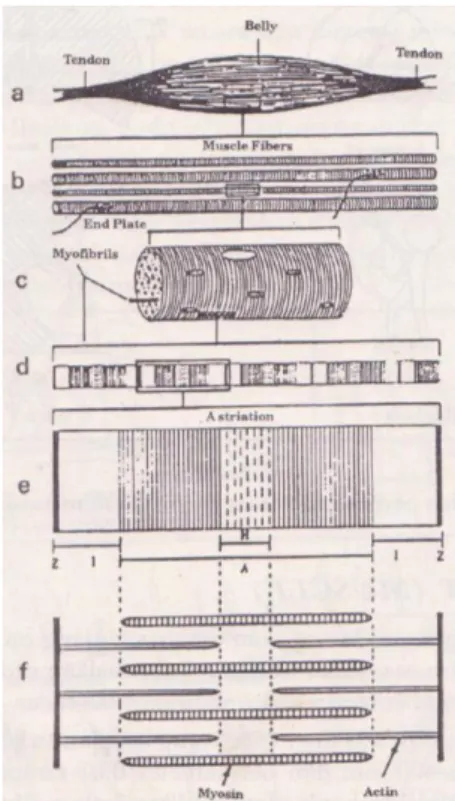
c) Otot (Muscle)
Membahas masalah otot striatik yaitu otot sadar. Otot terbentuk atas fiber (fibre), dengan ukuran panjang dari 10-400 mm dan berdiameter 0,01-0,1 mm dan sumber energi otot berasal dari pemecahan senyawa kaya energi melalui proses aerob maupun anaerob. Menurut Nurmianto, (1996), proses aerob maupun anaerob dapat dijelaskan sebagai berikut:
a. Anaerobic
Yaitu proses perubahan ATP menjadi ADP dan energi tanpa bantuan oksigen. Glikogen yang terdapat dalam otot terpecah menjadi energi, dan membentuk asam laktat. Dalam proses ini asam laktat akan memberikan indikasi adanya kelelahan otot secara local, karena kurangnya jumlah oksigen yang disebabkan oleh kurangnya jumlah suplai darah yang dipompa dari jantung. Misalnya jika ada gerakan yang sifatnya tiba-tiba (mendadak), lari jarak dekat (sprint), dan lain sebagainya. Sebab lain adalah karena pencegahan kebutuhan aliran darah yang mengandung oksigen dengan adanya beban otot statis. Ataupun karena aliran darah yang tidak cukup mensuplai oksigen dan glikogen akan melepaskan asam laktat.
b. Aerobic
Yaitu proses perubahan ATP menjadi ADP dan enegi dengan bantuan oksigen yang cukup. Asam laktat yang dihasilkan oleh kontraksi otot dioksidasi dengan cepat menjadi CO dan 2 H2O dalam kondisi aerobic. Sehingga beban pekerjaan yang tidak terlalu melelahkan akan dapat berlangsung cukup lama. Di samping itu aliran darah yang cukup akan mensuplai lemak, karbohidrat dan oksigen ke dalam otot. Akibat dari kondisi kerja yang terlalu lama akan menyebabkan kadar glikogen dalam darah akan
7
menurun drastic di bawah normal, dan kebalikannya kadar asam laktat akan meningkat, dan kalau sudah demikian maka cara terbaik adalah menghentikan pekerjaan, kemudian istirahat dan makan makanan yang bergizi untuk membentuk kadar gula dalam darah.
Hal tersebut di atas adalah merupakan proses kontraksi otot yang telah disederhanakan analisa pembangkit energinya, dan sekaligus menandakan arti pentingnya aliran darah untuk otot. Oleh karenanya para ergonom hendaklah memperhatikan hal-hal seperti berikut untuk sedapat mungkin dihindari (Nurmianto, 1996):
a) Beban otot statis (static muscle loads).
b) Oklusi (penyumbatan aliran darah) karena tekanan, misalnya tekanan segi kursi pada popliteal (lipat lutut).
c) Bekerja dengan lengan berada di atas yang menyebabkan siku aliran darah bekerja berlawanan dengan arah gravitasi.
Dalam dunia kerja yang menjadi perhatian adalah : a. Kekuatan kerja otot.
Kekuatan kerja otot bergantung pada : 1. Posisi anggota tubuh yang bekerja 2. Arah gerakan kerja.
3. Perbedaan kekuatan antar bagian tubuh. 4. Usia.
b. Kecepatan dan ketelitian.
c. Daya tahan jaringan tubuh terhadap beban.
Suatu hal yang penting untuk mengetahui jenis otot yang sesuai untuk menopang beban statis. Beban statis yang terjadi pada semua otot harus diminimumkan. Gaya yang terjadi pada kontraksi otot sama dengan sebanding dengan penampang melintangnya. Otot hanya mempunyai kemampuan berkontraksi dan relaksi bila bergerak dengan arah berlawanan terhadap otot yang lain, dikenal dengan gerakan antagonis.
8
Gambar 1. 4 Struktur Otot Manusia (Nurmianto, 1996)
Biomekanika dapat diterapkan pada [CHA91]: perancangan kembali pekerjaan yang sudah ada, mengevaluasi pekerjaan, penanganan material secara manual, pembebanan statis dan penentuan sistem waktu.
1.2 Analisis Mekanik
a. Maximum Permissible Limit (MPL)
Merupakan batas besarnya gaya tekan pada segmen L5/S1 dari kegiatan pengangkatan dalam satuan Newton yang distandarkan oleh NIOSH (National Instiute of Occupational Safety and Health) tahun 1981. Besar gaya tekannya adalah di bawah 6500 N pada L5/S1. Sedangkan batasan gaya angkatan normal (the Action Limit) sebesar 3500 pada L5/S1. Sehingga, apabila Fc < AL (aman), AL < Fc < MPL (perlu hati-hati) dan apabila Fc > MPL (berbahaya). Batasan gaya angkat maksimum yang diijinkan , yang direkomendasikan NIOSH (1991) adalah berdasarkan gaya tekan sebesar 6500 N pd L5/S1 , namun hanya 1% wanita dan 25% pria yang diperkirakan mampu melewati batasan angkat ini (Nurmianto, 1996).
9
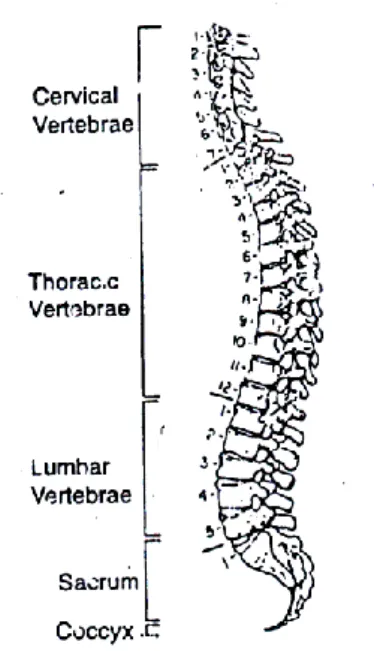
Perlu diperhatikan bahwa nilai dari analisa biomekanika adalah rentang postur atau posisi aktifitas kerja, ukuran beban, dan ukuran manusia yang dievaluasi. Sedangkan kriteria keselamatan adalah berdasar pada beban tekan (compression load) pada intebral disk antara Lumbar nomor lima dan sacrum nomor satu (L5/S1) (Nurmianto, 1996). Untuk mengetahui lebih jelas lagi L5/S1 dapat dilihat pada gambar 1.5 dibawah ini:
Gambar 1. 5 Klasifikasi dan kodifikasi pada vertebrae (Nurmianto, 1996)
Analisa dari berbagai macam pekerjaan yang menunjukkan rasa nyeri (ngilu) berhubungan erat dengan beban kompresi (tekan) yang terjadi pada (L5/S1), demikian kata Chaffin and Park (1973). Telah ditemukan pula bahwa 85-95% dari penyakit hernia pada disk terjadi dengan relative frekuensi pada L4/L5 dan L5/S1. Kebanyakan penyakit-penyakit tulang belakang adalah merupakan hernia pada intervertebral disk yaitu keluarnya inti intervertebral (pulpy nucleus) yang disebabkan oleh rusaknya lapisan pembungkus intervertebral disk (Nurmianto, 1996).
Dalam buku Nurmianto (1996), Evan dan Lissner (1962) dan Sonoda (1962) melakukan penelitian dengan uji tekan pada spine (tulang belakang). Mereka menemukan bahwa tulang belakang yang sehat tidak mudah terkena hernia, akan tetapi lebih mudah rusak/retak jika disebabkan oleh beban yang ditanggung oleh segmen tulang belakang (spinal) dan yang terjadi dengan
10
diawali oleh rusaknya bagian atas/ bawah segmen tulang belakang (the
castilage end-plates in the vertebrae). Retak kecil yang terjadi pada vertebral
akan menyebabkan keluarnya cairan dari dalam vertebrae menuju kedalam intervetrebae disc dan selanjutnya mengakibatkan degenerasi (kerusakan) pada disk. Dari kejadian ini dapat ditarik kesimpulan bahwa degenerasi adalah merupakan prasyarat untuk terjadinya hernia pada intervertebral disc yang pada gilirannya akan menjadi penyebab umum timbulnya rasa nyeri pada bagian punggung bawah (low-back pain).
Dalam gerakan pada sistem kerangka otot, otot bereaksi terhadap tulang untuk mengendalikan gerak rotasi di sekitar sambungan tulang, beberapa sistem pengungkit menjelaskan hal tersebut. Dalam sistem ini otot bertindak sebagai sistem mekanis yang berfungsi untuk suplai energi kinetik dan gerakan angular (Nurmianto, 1996).
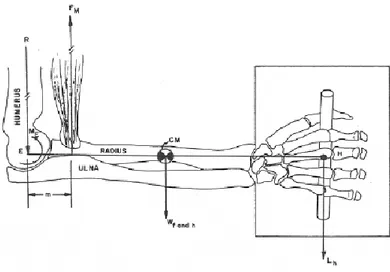
Pada Gambar 1.6 digambarkan sistem pengungkit yang terdapat pada anggota tubuh manusia yang melakukan aktivitas kerja (Nurmianto, 1996).
Gambar 1. 6 Single Segment biomechanical model of a forearm and a hand
11
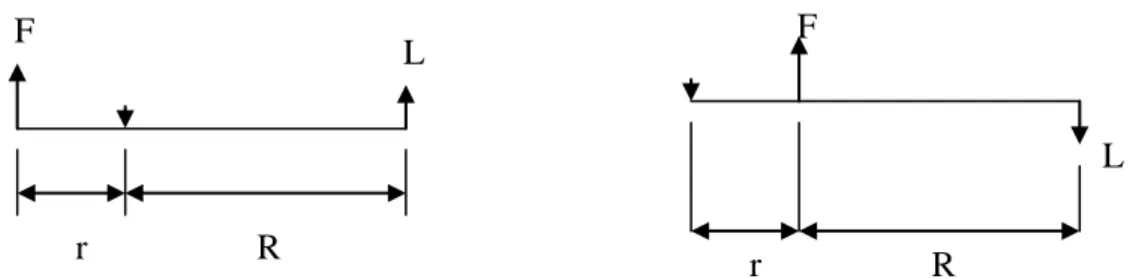
Gambar 1. 7 Sistem Pengungkit pada Tubuh Manusia (Nurmianto, 1996)
a. Sistem pengungkit I : Contoh sistem pengungkit I :
- Otot Triceps menarik ulna untuk menggerakkan siku
- Otot Quadriceps menarik tibia melalui patella untuk menggerakkan lutut
b. Sistem pengungkit II : Contoh sistem pengungkit II :
- Otot Biceps menarik radius untuk mengangkat siku - Otot Brachialis menarik ulna untuk mengangkat siku - Otot Deltoid menarik humerus untuk mengangkat bahu
Untuk mendapatkan gambaran sederhana tentang mekanisme gaya (force) tersebut, dibawah ini terdapat contoh sbb:
Contoh soal:
Suatu benda kerja seberat 2 kg diangkat dengan satu lengan, berat lengan tersebut 25 N. Di ketahui jarak pusat beban lengan terhadap pusat beban benda sejauh 30 cm, r = 5 cm, R = 13 cm W=25 P=2 kg 5 cm 13 cm 30 cm F J F L r R r R F L (Sistem Pengungkit I) r R.L
F (Sistem Pengungkit II)
r L ) R r ( F
12
Dari data diatas dapat kita tentukan gaya F yang dikenai benda terhadap lengan sbb: N 140 20 -25 -185 J : adalah reaksinya gaya dan N 185 5 20) x (30 25) x (13 F
Perlu kita ketahui bahwa seorang operator bekerja tidak hanya lengan saja yang mengeluarkan tenaga, tetapi bagian tubuh yang lain seperti punggung, paha, betis dll.
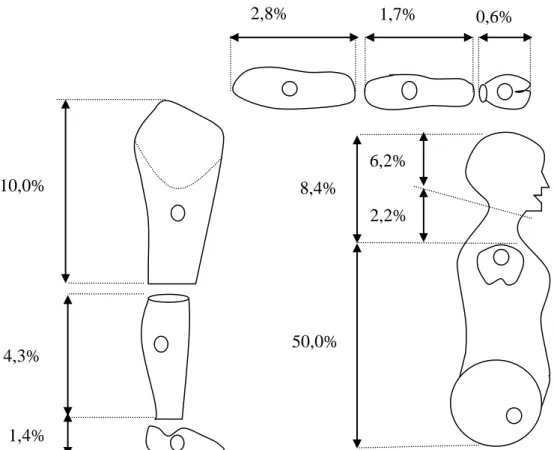
Dalam biomekanik perhitungan guna mencari moment dan gaya dapat dilakukan dengan cara menghitung gaya dan mement secara parsial atau menghitung tiap segmen yang menyusun tubuh manusia. Berat dari masing – masing segmen dibawah ini didapat dari besarnya prosentase dikali dengan gaya berat dari orang tersebut.
Gambar 1. 8 Persentase Persegmen tubuh (Tayyari, 1997) 10,0% 4,3% W 1,4% 8,4% W 50,0% W 2,2% W 6,2% W 2,8% 1,7% W W 0,6% W
13
Oleh karena itu, di bawah ini merupakan perhitungan (secara manual) dalam praktikum ini, yaitu dihitung tiap segmen yang mempengaruhi tulang belakang dalam melakukan aktivitas pengangkatan, kecuali segmen kaki dan dilakukan berdasarkan asumsi di bawah ini (Tayyari, 1997):
Parameter segmen tubuh pada gambar 1.7 telah sesuai.
Pusat massa tetap dan dapat direpresentasikan melalui salah satu segmen. Tubuh diasumsikan simetris, dengan beban eksternal terdistribusi dalam
jumlah yang sama antara tangan kanan dan kiri.
1. Telapak tangan
2. Lengan Bawah
ΣFy = 0
ΣFx = 0 -- tidak ada gaya horisontal. ΣM = 0 λ2 = 43% WLA = 1,7% x Wbadan Fye = Fyw + WLA Me = Mw + (WLA x λ2 x SL2 x cosθ2) + (Fyw x SL2 x cos θ2) ΣFy = 0
ΣFx = 0 -- tidak ada gaya horisontal. ΣM = 0 WH = 0,6% x Wbadan Fyw = Wo/2 + WH Mw = (Wo/2 + WH) x SL1 x cos θ1 Fyw Fxw Wo WH SL1 Mw 1 Fye Fxe -Fyw WLA SL2 λ2 -Mw Me -Fxw θ2
14 3. Lengan Atas
NB : Gaya pada lengan atas dikalikan dua. Moment dikali dua agar benda utuh satu
4. Punggung
Dengan menggunakan teknik perhitungan keseimbangan gaya pada tiap segmen tubuh manusia, maka didapat moment resultan pada L5/S1. Kemudian untuk mencapai keseimbangan tubuh pada aktivitas pengangkatan, moment pada L5/S1 tersebut diimbangi gaya otot pada spinal erector (FM)
ΣFy = 0
ΣFx = 0 -- tidak ada gaya horisontal. ΣM = 0 λ3 = 43,6% WUA = 2,8% x Wbadan Fys = Fye + WUA Ms = Me + (WUA x λ3 x SL3 x cosθ3) + (Fye x SL3 x cos θ3) Mt ΣFy = 0
ΣFx = 0 -- tidak ada gaya horisontal. ΣM = 0 λ4 = 67% WT = 50% x Wbadan Fyt = 2Fys + WT Mt = 2Ms + (WT x λ4 x SL4 x cos θ4) + (2Fys x SL4 x cos θ4) Fys Fxs -Fye WUA SL3 λ3 -Fxe -Me Ms θ3 -Fxs Fxt SL4 λ4 -Ms -Fys WT Fxt θ 4
15
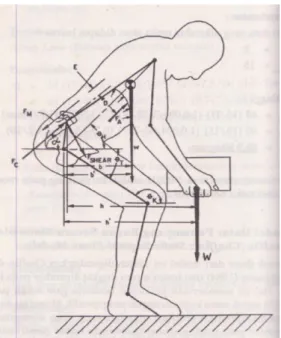
yang cukup besar dan juga gaya perut (FA) sebagai pengaruh tekanan perut (PA) atau Abdominal Pressure yang berfungsi untuk membantu kestabilan badan karena pengaruh momen dan gaya yang ada seperti model pada gambar 1.8 dibawah ini.
Gambar 1. 8 Model sederhana dari punggung bawah (low back) untuk analisis terhadap aktifitas angkat Koplanar Statis. (Chaffin, 1984)
Gaya otot pada spinal erector dirumuskan sebagai berikut:
D
F
M
E
F
M.
(L5/S1)
A.
(Newton)
FM = Gaya otot pada Spinal Erector (Newton)
E = Panjang Lengan momen otot spinal erector dari L5/S1 (estimasi 0,05 m sumber: Nurmianto; 1996)
M(L5/S1) = MT = Momen resultan pada L5/S1 FA = Gaya Perut (Newton)
D = Jarak dari gaya perut ke L5/S1 ( 0,11 m) ( Sumber:Nurmianto,1996)
16
Untuk mencari Gaya Perut (FA), maka perlu dicari Tekanan Perut (PA) dengan persamaan:
(N/Cm2) (newton)
W
tot= Wo +2 WH + 2 W
LA+ 2 W
UA+ Wt
Keterangan: PA = Tekanan Perut AA = Luas Diafragma (465 cm2) ΘH = Sudut inklinasi perut ΘT = Sudut inklinasi kakiWtot = Gaya keseluruhan yang terjadi
Kemudian gaya tekan/kompresi pada L5/S1 dirumuskan sbb:
17
Gambar 1. 9 Contoh pengangkatan MPL
b. Recommended Weight Limit (RWL)
Recommended Weight Limit merupakan rekomendasi batas beban yang
dapat diangkat oleh manusia tanpa menimbulkan cidera meskipun pekerjaan tersebut dilakukan secara repetitive dan dalam jangka waktu yang cukup lama. RWL ini ditetapkan oleh NIOSH pada tahun 1991 di Amerika Serikat. Persamaan NIOSH berlaku pada keadaan:
1. Beban yang diberikan adalah beban statis, tidak ada penambahan ataupun pengurangan beban di tengah – tengah pekerjaan.
18 2. Beban diangkat dengan kedua tangan.
3. Pengangkatan atau penurunan benda dilakukan dalam waktu maksimal 8 jam.
4. Pengangkatan atau penurunan benda tidak boleh dilakukan saat duduk atau berlutut.
5. Tempat kerja tidak sempit.
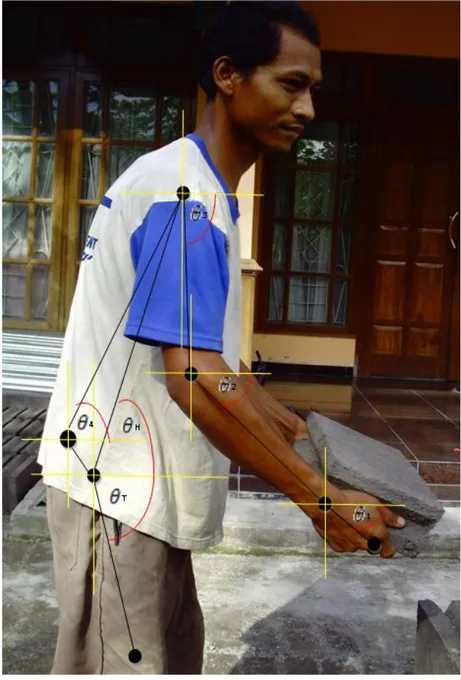
Berdasarkan sikap dan kondisi sistem kerja pengangkatan beban dalam proses pemuatan barang yang dilakukan oleh pekerja dalam eksperimen, penulis melakukan pengukuran terhadap faktor – faktor yang mempengaruhi dalam pengangkatan beban dengan acuan ketetapan NIOSH (1991).
Gambar 1. 10 Recommended Weight Limit
Persamaan untuk menentukan beban yang direkomendasikan untuk diangkat seorang pekerja dalam kondisi tertentu menurut NIOSH adalah sbb:
RWL = LC x HM x VM x DM x AM x FM x CM
Keterangan:LC = konstanta pembebanan = 23 kg HM = faktor pengali horizontal = 25 / H
19
CM = faktor pengali kopling (handle) * lihat tabel 2 VM = Faktor pengali vertikal
DM = Faktor pengali perpindahan
AM = Faktor pengali asimetrik
Catatan (lihat Gambar 1.11) Keterangan:
H = jarak beban terhadap titik pusat tubuh V = jarak beban terhadap lantai
D =jarak perpindahan beban secara vertical A = sudut simetri putaran yang dibentuk tubuh
Untuk Frekuensi Pengali ditentukan dengan menggunakan tabel FM dibawah ini dengan mengetahui frekuensi angkatan tiap menitnya dan juga nilai V dalam inchi.
20
Tabel 1. 1 Tabel Frekuensi Pengali
Frekuensi Durasi Kerja
Angktn/mnt 1 jam 1 jam t 2 jam 2 jam t 8 jam (F) V < 30 V 30 V < 30 V 30 V < 30 V 30 0.2 1.00 1.00 0.95 0.95 0.85 0.85 0.5 0.97 0.97 0.92 0.92 0.81 0.81 1 0.94 0.94 0.88 0.88 0.75 0.75 2 0.91 0.91 0.84 0.84 0.65 0.65 3 0.88 0.88 0.79 0.79 0.55 0.55 4 0.84 0.84 0.72 0.72 0.45 0.45 5 0.80 0.80 0.60 0.60 0.35 0.35 6 0.75 0.75 0.50 0.50 0.27 0.27 7 0.70 0.70 0.42 0.42 0.22 0.22 8 0.60 0.60 0.35 0.35 0.18 0.18 9 0.52 0.52 0.30 0.30 0.00 0.15 10 0.45 0.45 0.26 0.26 0.00 0.13 11 0.41 0.41 0.00 0.23 0.00 0.00 12 0.37 0.37 0.00 0.21 0.00 0.00 13 0.00 0.34 0.00 0.00 0.00 0.00 14 0.00 0.31 0.00 0.00 0.00 0.00 15 0.00 0.28 0.00 0.00 0.00 0.00 >15 0.00 0.00 0.00 0.00 0.00 0.00
Keterangan: untuk frekuensi pengangkatan kurang atau hanya 1 kali dalam 5 menit ditetapkan F = 2 Lift/mnt.
Untuk Faktor Pengali coupling (handle) dapat ditentukan pada Tabel 1.2 berikut:
Tabel 1. 2 Tabel Coupling Multiplier
Coupling Multiplier
Coupling V < 30 inches V > 30 inches
Type (75 cm) (75 cm)
Good 1.00 1.00
Fair 0.95 1.00
21
Dari persamaan yang ditetapkan NIOSH tersebut, terdapat perbedaan faktor pengali jarak vertikal untuk pekerja Indonesia, sehingga perlu penyesuaian terhadap nilai perkiraan berat beban yang direkomendasikan untuk diangkat. Adanya perbedaan ini karena faktor pengali vertikal sangat bergantung pada antropometri ketinggian knuckle (jarak vertikal dari lantai ke ujung jari tangan dengan posisi lurus ke bawah). Perumusan faktor pengali vertikal yang dihasilkan oleh NIOSH adalah:
Sedangkan dari hasil penelitian di dapat bahwa untuk pekerja industri Indonesia faktor pengali jarak:
Setelah nilai RWL diketahui, selanjutnya perhitungan Lifting Index, untuk mengetahui index pengangkatan yang tidak mengandung resiko cidera tulang belakang, dengan persamaan:
RWL
L
Limit
Weight
d
Recommende
Weight
Load
LI
Keterangan:Jika LI 1, maka aktivitas tersebut tidak mengandung resiko cidera tulang belakang. Jika LI > 1, maka aktivitas tersebut mengandung resiko cidera tulang belakang.
Menurut Chaffin & Anderson (1984), tubuh manusia terdiri dari 6 link, yaitu: 1. Link lengan bawah, dibatasi joint telapak tangan dan siku.
2. Link lengan atas, dibatasi joint siku dan bahu. 3. Link punggung, dibatasi joint bahu dan pinggul. 4. Link paha, dibatasi joint pinggul dan lutut. 5. Link betis, dibatasi joint lutut dan mata kaki.
6. Link kaki, dibatasi joint mata kaki dan telapak kaki.
2. Kelelahan
Dalam biomekanik kita akan berurusan dengan salah satu kejadian yang dinamakan kelelahan. Kelelahan ini tidak lepas dari biomekanik karena dalam
22
aplikasinya biomekanik melihat orang secara mekanik, tetapi kodrat kemanusiaan pada manusia tidak dapat dikesampingkan sehingga manusia/pekerja mempunyai keterbatasan yaitu salah satunya keadaan yang dinamakan lelah. Kelelahan adalah proses menurunnya efisiensi performansi kerja dan berkurangnya kekuatan atau ketahanan fisik tubuh manusia untuk melanjutkan kegiatan yang harus dilakukan.
Dalam bahasan lain, kelelahan didefinisikan sebagai suatu pola yang timbul pada suatu keadaan yang secara umum terjadi pada setiap individu yang telah tidak sanggup lagi untuk melakukan aktivitasnya. Ada beberapa macam kelelahan yang diakibatkan oleh beberapa faktor, seperti:
1. Lelah otot, yang diindikasikan dengan munculnya gejala kesakitan ketika otot harus menerima beban berlebihan.
2. Lelah visual, yaitu lelah yang diakibatkan ketegangan yang terjadi pada organ visual (mata) yang terkonsentrasi secara terus menerus pada suatu objek. 3. Lelah mental, yaitu kelelahan yang datang melalui kerja mental seperti berfikir
sering juga disebut sebagai lelah otak.
4. Lelah monotonis, yaitu kelelahan yang disebabkan oleh aktivitas kerja yang bersifat rutin, monoton, ataupun lingkungan kerja yang menjemukan.
Sedangkan kelelahan yang disebabkan oleh sejumlah faktor yang berlangsung secara terus menerus dan terakumulasi, akan menyebabkan apa yang disebut dengan lelah kronis. Di mana gejala-gejala yang tampak jelas akibat lelah kronis dapat dicirikan seperti:
1. Meningkatnya emosi dan rasa jengkel sehingga orang menjadi kurang toleran atau asosial terhadap orang lain.
2. Munculnya sikap apatis terhadap pekerjaan. 3. Depresi yang berat.
2.1 Proses Terjadinya Kelelahan
Kelelahan terjadi karena terkumpulnya produk-produk sisa dalam otot dan peredaran darah, di mana produk-produk sisa ini bersifat membatasi kelangsungan aktivitas otot dan mempengaruhi serat-serat syaraf dan sistem syaraf pusat sehingga orang menjadi lambat bekerja. Makanan yang mengandung glikogen mengalir dalam tubuh melalui peredaran darah. Setiap kontraksi dari otot selalu
23
diikuti oleh kimia (oksidasi glukosa) yang merubah glikogen menjadi tenaga, panas dan asam laktat (produk sisa).
Pada dasarnya kelelahan timbul karena terakumulasinya produk sisa dalam otot dan tidak seimbangnya antara kerja dan proses pemulihan. Secara lebih jelas terdapat 3 penyebab timbulnya kelelahan fisik, yaitu:
1. Oksidase glukosa dalam otot menimbulkan CO2 ,saerolactic, phosphati dan sebagainya, dimana zat-zat tersebut terikat dalam darah yang kemusian dikeluarkan waktu bernafas. Kelelahan terjadi apabila pembentukan zat-zat tersebut tidak seimbang dengan proses pengeluaran, sehingga timbul penimbunan dalam jaringan otot yang mengganggu kegiatan otot selanjutnya. 2. Karbohidrat didapat dari makanan dirubah jadi glukosa dan disimpan dihati
dalam bentuk glukogen. Setiap cm2 darah normal akan membawa 1 mm glukosa, berarti setiap sirkulasi darah hanya membawa 0,1% dari sejumlah glikogen yang ada dalam hati karena bekerja persediaan glikogen akan menipis dan kelelahan akan timbul apabila konsentrasi glikogen dalam hati tinggal 0,7%.
3. Dalam keadaan normal jumlah udara yang masuk dalam pernafasan kira-kira 4 Lt/menit, sedangkan dalam keadaan kerja keras dibutuhkan udara kira-kira 15 Lt/menit. Ini berarti pada suatu tingkat kerja tetentu akan dijumpai suatu keadaan dimana jumlah oksigen yang masuk melalui pernafasan lebih kecil dari tingkat kebutuhan. Jika hal ini terjadi maka kelelahan yang timbul dikarenakan reaksi oksidasi dalam tubuh yaitu untuk mengurangi asam laktat menjadi air dan karbon dioksida agar dikeluarkan dari tubuh, menjadi tidak seimbang dengan pembentukan asam laktat itu sendiri (asam laktat terakumulasi dalam otot dalam peredaran darah)
2.2 Gejala-Gejala Kelelahan
Secara pasti datangnya keletihan yang menimpa pada diri seseorang akan sulit untuk diidentifikasikan secara jelas mengukur lingkungan kelelahan seseorang bukanlah pekerjaan yang mudah. Prestasi ataupun performansi kerja yang bisa mengevaluasi tingkatan kelelahan. Kelelahan dapat kita lihat melalui indikasi-indikasi (gejala-gejala) sebagai berikut:
24 1. Perhatian pekerja yang menurun.
2. Perasaan berat dikepala, menjadi lelah seluruh badan, kaki terasa berat menguap, pikiran merasa kacau, mata merasa berat, kaku dan canggung dalam gerakan tidak seimbang dalam berdiri terasa berbaring.
3. Merasa susah berpikir menjadi gugup tidak dapat konsentrasi tidak dapat mempunyai perhatian terhadap sesuatu cenderung lupa kurang kepercayaan cemas terhadap sesuatu tidak dapat mengontrol sikap dan tidak tekun dalam pekerjaan.
4. Sakit kekakuan bahu nyeri di pinggang pernafasan merasa tertekan suara serat, haus, terasa pening , spasme dari kelopak mata, tremor pada anggota badan merasa kurang sehat badan.
2.3 Upaya Mengurangi Kelelahan.
Problematika kelelahan akhirnya membawa manajemen untuk selalu berupaya mencari jalan keluar. Karena apabila kelelahan tidak segera ditangani secara serius akan menghambat produktivitas kerja dan bisa menyebabkan kecelakaan kerja. Adapun upaya-upaya untuk mengurangi kelelahan adalah sebagai berikut:
1. Sediakan kalori secukupnya sebagai input untuk tubuh.
2. Bekerja menggunakan metode kerja yang baik. Misalkan bekerja dengan menggunakan prinsip ekonomi gerakan.
3. Memperhatikan kemampuan tubuh, artinya mengeluarkan tenaga tidak melebihi pemasukannya dengan memperhatikan batasan- batasannya.
4. Memperhatikan waktu kerja yang teratur. Berarti harus dilakukan pengaturan terhadap jam kerja, waktu istirahat, dan sarana-sarananya. Masa-masa libur dan rekreasi.
5. Mengatur lingkungan fisik sebaik-baiknya, seperti temperatur, kelembaban, sirkulasi udara, pencahayaan kebisingan getaran, bau/wangi-wangian, dll. 6. Berusaha untuk mengurangi monotoni warna dan dekorasi ruangan kerja,
25 2.4 Penyebab Kelelahan
Kelelahan yang terjadi dapat disebabkan berbagai hal penyebab yang paling penting adalah:
1. Monotonitas
2. Intensitas dan durasi kerja
3. Lingkungan suasana, cahaya, dan kebisingan. 4. Fisiologi tanggung jawab.
5. Sakit, ngilu, dan gejala nutrisi.
Contoh Soal a) MPL
Seorang pekerja mengambil kotak yang berada pada ketinggian 45 cm di atas lantai dan mengangkat ke meja 70 cm di atas lantai. Berat kotak 60 kg, berat badan 65 kg, jarak pergelangan tangan ke pusat masa benda 0,07 m, θ1 = 20o, jarak pergelangan tangan-siku = 0,28 m, θ2 = 20o, jarak siku-bahu = 0,3 m θ3 = 80o, jarak bahu ke L5/S1 = 0,36 m θ4 = 45o. sudut inklinasi perut 45o, sudut inklinasi paha 50o. Hitunglah gaya tekan pada L5/S1 tersebut!
Penyelesaian : WH = 0,6 % Wbadan = 0,6% * 650 = 3,9 N WLA = 1,7 % Wbadan = 1,7% * 650 = 11,05 N WUA = 2,8 % Wbadan = 2,8% * 650 = 18,2 N WT = 50 % Wbadan = 50% * 650 = 325 N Sehingga, WTOT = Wo + 2WH + 2WLA + 2WUA + WT = 971,3 N 2 = 0.43 3 = 0.436 4 = 0.67 D = 0.11 AA = 465 cm2 Wo = 60 kg * 10 = 600 N Wbdn = 65 kg * 10 = 650 N
26
No Segmentasi Tubuh Panjang (m) Sudut (derajat) 1. Telapak tangan SL1 = 0,07 20o 2. Lengan bawah SL2 = 0,28 20o 3. Lengan Atas SL3 = 0,30 80o 4. Punggung SL4 = 0,36 45o 5. Inklinasi Perut θH = 45o 6. Inklinasi Paha ΘT = 50o A. Telapak Tangan Fyw = Wo/2 + WH = 303.9 N MW = (W0/2 + WH) * SL1 * Cos θ1 = 19,99 = 20 Nm B. Segmen Lengan Bawah
Fye = Fyw + WLA = 314,95 N = 315 N
Me = MW + (WLA * 2 * SL2 * Cos θ2) + (Fyw * SL2 * Cos θ2) = 101,21 Nm
C. Segmen Lengan Atas Fys = Fye + WUA = 333,2 N
Ms = Me + (WUA * 3 * SL3 * Cos θ3) + (Fye * SL3 * Cos θ3) = 118,03 Nm
D. Segmen Punggung
Fyt = 2Fys + WT = 991.4 N
Mt = 2Ms+ (WT * 4 * SL4 * Cos θ4) + (2Fys * SL4 * Cos θ4) = 236.06 + 55,43 + 169.64 = 461.04 Nm
Kemudian Gaya perut (PA) dan Tekanan Perut (FA)
1 / 5 75 36 . 0 43 10 4 S L M PA H T 1,8 = 0,73 N/cm2 FA = PA * AA = 0,73 * 465 = 339.45 N Gaya otot pada spinal erector : FM * E = M(L5/S1) – FA * D FM = 8474,01 N
Gaya Tekan/kompresi pada L5/S1:
27 Kesimpulan:
Pekerjaan tersebut membahayakan bagi pekerja dan sebaiknya dilakukan perbaikan secara adimistasi dan teknis sehingga pekerja dapat bekerja dengan sehat tanpa mengalami cedera pada L5/S1 serta tujuan dan target perusahaan dapat tercapai.
b) RWL
Seorang pekerja mengambil kotak dengan berat 5 kg di atas konveyor 15 cm dan mengangkat ke sebuah meja dengan ketinggian 125 cm dari lantai. Jarak beban terhadap titik pusat tubuh 35 cm. Sudut simetri putaran yang dibentuk tubuh 45o. Jika selama 80 menit pekerja tersebut melakukan pengangkatan sebanyak 224 kali, Berapa batas beban yang direkomendasikan? Apakah pekerjaan tersebut dikategorikan aman atau tidak? (diketahui Handle Coupling dalam kategori Fair) Penyelesaian : L= 5 kg LC = 23 kg V = 15 cm Handle Fair = 0,95 D = 110 cm H = 35 cm A = 45o Menghitung, HM = 25/H = 25/35 = 0,714 VM = 1- 0,00326 V 69 = 1- 0,00326 1569 = 0,82396 DM = 0,82 + 4,5/D = 0.82 + 4.5/110 = 0.861 FM = 224 lift/80 mnt= 2.8 = 3 CM = 0,95 LC = 23 Sehingga :
RWL = LC
*HM
*VM
*DM
*AM
*FM
*CM
RWL = (23) (0.714) (0.82396) (0.861) (0.856) (0.79) (0.95) = 7,48428 Kemudian mencari Lifting Index,
69
,
0
484
,
7
5
_
_
Re
LI
RWL
L
Limit
Weight
commended
LoadWeight
LI
Kesimpulan:
Karena LI ≤ 1, maka aktivitas tersebut tidak mengandung resiko cidera tulang belakang bagi pekerja dan sebainya metode kerja di pertahankan dan data tersebut dapat digunakan sebagai bahan perbandingan dalam perekrutan pekerja baru.
E. PRAKTIKUM
Alat Dan Bahan Praktikum 1. Beban kerja
2. Penggaris atau meteran pengukur 3. Alat pengukur sudut (busur) 4. Timbangan berat badan
5. Stop watch
6. Meja kerja
7. Lembar pengamatan
Prosedur Pelaksanaan Praktikum 1. Ukur berat beban kerja.
2. Untuk pengangkatan RWL, posisikan operator pada bidang pengangkatan, catat data-data yang diperlukan seperti data operator, beban, H, V, dan A pada posisi pertama (origin), jumlah angkatan per menit (F), dll.
3. Operator mengangkat beban kerja dari lantai ke meja kerja selama 2 menit. 4. Catat H, V dan A pada posisi setelahnya (destination), dan hitung D. 5. Sedangkan untuk pengangkatan MPL, posisikan operator pada bidang
pengangkatan sesuai posisi MPL.
6. Foto operator untuk 1 kali pengangkatan, kemudian analisa berdasarkan analisa MPL.
7. Lengkapi lembar pengamatan kriteria Biomekanik (RWL dan MPL). 8. Data diolah dan dihitung.