Rancang Bangun Konveyor Untuk Mengetahui
Hasil Output Produksi Mengunakan Arduino Uno Dan C#.Net
Hendri Setiawan [email protected]
Jurusan Teknik Elektro Universitas Mercubuana
Jl Raya Meruya Selatan, No 1 Kembangan Jakarta barat, 11650, INDONESIA
Abstrak
Pada proses produksi di sebuah industri, khususnya industri makanan yang selalu menghasilkan output begitu banyak di akhir produksinya, sehingga terkadang faktor dari kelemahan manusia bisa membuat kelacaran proses produksi terhambat sebagai contoh hasil proses produksi yang sudah jadi sebelum di kirim ke konsumen, sebuah industri makanan selalu menyimpan di gudang peyimpanan akhir. Terkadang dari line produksi ke gudang peyimpanan akhir sangat lah jauh jarak antara line produksi ke line gudang penyimpanan, dan juga cara menghitung output produksi masih mengunakan manual tanpa di dampingi proses secara otomatis menggunakan perangkat elektronik yang mempuni, Sehingga hasil hitung manual yang di lakukan manusia(operator) dari line produksi terkadang berbeda dengan gudang penyimpanan akhir. Tujuan dari tugas akhir ini adalah untuk membuat kelancaran proses produksi dan meminimalkan kesalahan dalam penghitungan hasil ouput produksi, dengan sebuah rancang bangun konveyor memakai sinar Infrareduntuk sensor penanda bahwa barang yang terkena sinar inflared, akan dihitung oleh aplikasi dengan mengunakan software Microsoft visual studio dengan mengunakan bahasa C#.Dari hasil penilitian didapatkan bahwa Rancang Bangun Konveyor Untuk Mengetahui Hasil Output Produksi Mengunakan Arduino Uno Dan C#.Net. dapat mempermudah proses produksi di sebuah industri.
Kata kunci : Proses Produksi, Konveyor, inflared 1. Latar Belakang Masalah
2. 3.
4. Teknologi saat ini berkembang sangat pesat seiring dengan kemajuan zaman. Pada zaman dahulu pemindahan bahan baku dalam industri masih menggunakan tenaga hewan atau manusia. Karena manusia atau hewan memiliki keterbatasan dan tidak dapat bekerja terus menerus dalam jangka waktu lama, maka secara perlahan tenaga hewan atau manusia mulai tergantikan oleh tenaga mesin Penggantian tenaga manusia dengan mesin dapat
mengoptimalkan dan
memaksimalkan proses produksi dalam industrialisasi.
5. Saat ini banyak Industri mulai mengunakan mesin yang serba praktis dan ekonomis. Mesin tersebut berfungsi untuk meringankan dan mempermudah pekerjaan manusia, salah
satunya adalah konveyor. Konveyor di industri digunakan untuk memindahkan bahan baku dari satu tempat ke tempat lain.
6. Oleh karena penemuan di lapangan, realita tentang proses pemuatan barang hasil produksi pada gudang penyimpanan masih menggunakan tenaga manusia dan proses penghitungan jumlah barang yang akurasinya kurang tepat serta kecepatan proses sangat jauh dari cukup.
menggunakannya. Dalam melaksanakan efisiensi ini berarti :
8.
1. Menurunkan biaya material dan efisiensi pemakaian tenaga kerja. 2. Meminimalkan down time dari mesin
product.
3. Biaya peralatan produksi murah. 4. Meminimalkan kesalahan jumlah
hasil produksi. 5.
6. Mikrokontroler memenuhi kebanyakan dari persyaratan di atas dan merupakan salah satu kunci dalam meningkatkan efisiensi produksi dalam industri, Sehubungan dengan uraian diatas penulis mencoba menyusun dan merancang tugas akhir dengan judul “Rancang Bangun Sistem Kontrol Konveyor Untuk
9. 2.1 Pengertian Microcontroller 10.
11. Mikrokontroler adalah
sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output.
12. Mikrokontroler merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut “pengendali kecil” dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler, Mikrokontroler terdiri dari beberapa bagian seperti yang terlihat pada gambar di bawah ini :
13.
14.
15. Gambar 1. Bagian Mikrokontroler 16.
17. Pada Gambar 1. tampak suatu mikrokontroler standar yang tersusun atas komponen-komponen.
18.
19. 2.2 Kit Mikrokontroler Arduino Uno
20.
21. 2.2.1 Pengertian Arduino 22.
23. Arduino adalah pengendali
mikro single-board yang bersifat open-source, diturunkan dari Wiring platform, dirancang untuk memudahkan penggunaan elektronik dalam berbagai bidang.
Hardware-nya memiliki prosesor Atmel AVR dan softwarenya memiliki bahasa pemrograman sendiri.
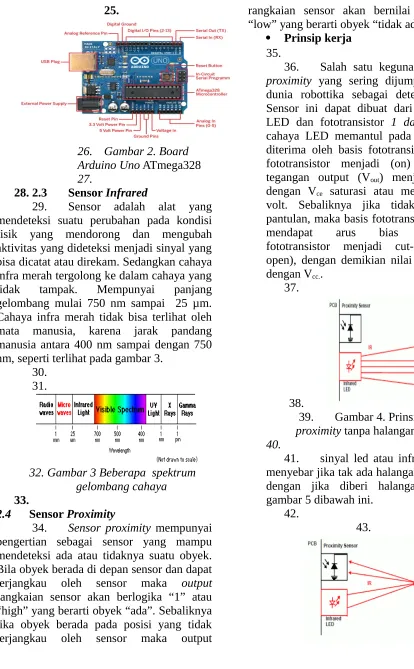
24. Arduino Uno kit elektronik
atau papan rangkaian elektronik open source
yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino adalah sebuah board mikrokontroller yang berbasis ATmega328. Arduino memiliki 14 pin input/output yang mana 6 pin dapat digunakan sebagai output PWM, 6 analog input, crystal osilator 16 MHz, koneksi USB, jack power, kepala ICSP, dan tombol
reset. Arduino mampu men-support
25.
26. Gambar 2. Board Arduino Uno ATmega328
27.
28. 2.3 Sensor Infrared
29. Sensor adalah alat yang mendeteksi suatu perubahan pada kondisi fisik yang mendorong dan mengubah aktivitas yang dideteksi menjadi sinyal yang bisa dicatat atau direkam. Sedangkan cahaya infra merah tergolong ke dalam cahaya yang tidak tampak. Mempunyai panjang gelombang mulai 750 nm sampai 25 µm. Cahaya infra merah tidak bisa terlihat oleh mata manusia, karena jarak pandang manusia antara 400 nm sampai dengan 750 nm, seperti terlihat pada gambar 3.
30. 31.
32. Gambar 3 Beberapa spektrum gelombang cahaya 33.
2.4 Sensor Proximity
34. Sensor proximity mempunyai pengertian sebagai sensor yang mampu mendeteksi ada atau tidaknya suatu obyek. Bila obyek berada di depan sensor dan dapat terjangkau oleh sensor maka output
rangkaian sensor akan berlogika “1” atau “high” yang berarti obyek “ada”. Sebaliknya jika obyek berada pada posisi yang tidak terjangkau oleh sensor maka output
rangkaian sensor akan bernilai “0” atau “low” yang berarti obyek “tidak ada”.
Prinsip kerja
35.
36. Salah satu kegunaan sensor proximity yang sering dijumpai dalam dunia robottika sebagai deteksi garis. Sensor ini dapat dibuat dari pasangan LED dan fototransistor 1 dan 2. Bila cahaya LED memantul pada garis dan diterima oleh basis fototransistor maka fototransistor menjadi (on) sehingga tegangan output (Vout) menjadi sama
dengan Vce saturasi atau mendekati 0
volt. Sebaliknya jika tidak terdapat pantulan, maka basis fototransistor tidak mendapat arus bias sehingga fototransistor menjadi cut-off (C-E open), dengan demikian nilai Vout sama
dengan Vcc..
37.
38.
39. Gambar 4. Prinsip kerja
proximity tanpa halangan
40.
41. sinyal led atau infrared akan menyebar jika tak ada halangan. berbeda dengan jika diberi halangan seperti gambar 5 dibawah ini.
42.
44.Gambar 5. Prinsip kerja proximity
sebagaimana namanya, menggunakan arus langsung yang tidak langsung/ direct-unidirectional. Motor DC digunakan pada penggunaan khusus dimana diperlukan penyalaan torque yang tinggi atau percepatan yang tetap untuk kisaran kecepatan yang luas.
48. Keuntungan utama motor DC adalah sebagai pengendali kecepatan, yang tidak mempengaruhi kualitas pasokan daya. Motor ini dapat dikendalikan dengan mengatur:
Tegangan dinamo –
meningkatkan tegangan dinamo akan meningkatkan kecepatan
Arus medan – menurunkan arus medan akan meningkatkan kecepatan.
49.
50. 2.6 Relay 51.
52. Relay adalah Saklar (Switch) yang dioperasikan secara listrik dan merupakan komponen Electromechanical (Elektromekanikal) yang terdiri dari 2 bagian utama yakni Elektromagnet (Coil) dan Mekanikal (seperangkat Kontak Saklar/Switch). Relay menggunakan Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus listrik yang kecil (low power) dapat menghantarkan listrik yang bertegangan lebih tinggi. Sebagai contoh, dengan Relay yang menggunakan Elektromagnet 5V dan 50 mA mampu menggerakan Armature Relay (yang berfungsi sebagai saklarnya) untuk menghantarkan listrik 220V 2A.
53. telah umum diaplikasikan kedalam peralatan Elektronika diantaranya adalah :
Relay digunakan untuk menjalankan
Fungsi Logika (Logic Function)
Relay digunakan untuk memberikan Fungsi penundaan waktu (Time Delay Function).
Relay digunakan untuk
mengendalikan Sirkuit Tegangan tinggi dengan bantuan dari Signal Tegangan rendah.
Ada juga Relay yang berfungsi untuk melindungi Motor ataupun komponen lainnya dari kelebihan inisiatif kerangka .NET Framework. Bahasa pemrograman ini dibuat berbasiskan bahasa C++ yang telah dipengaruhi oleh aspek-aspek ataupun fitur bahasa yang terdapat pada bahasa-bahasa pemrograman lainnya seperti Java, Delphi, Visual Basic, dan lain-lain dengan beberapa penyederhanaan. Menurut standar
dalam seni musik tidak terdapat di dalam keyboard standar.
2.7.1 Tujuan Desain
61. Standar European Computer Manufacturer Association (ECMA) mendaftarkan beberapa tujuan desain dari bahasa pemrograman C#, sebagai berikut:
1. Bahasa pemrograman C# dibuat sebagai bahasa pemrograman
yang bersifat bahasa
pemrograman general-purpose
(untuk tujuan jamak),
berorientasi objek, modern, dan sederhana.
2. Bahasa pemrograman C# ditujukan untuk digunakan dalam mengembangkan komponen perangkat lunak yang mampu mengambil keuntungan dari lingkungan terdistribusi.
3. Portabilitas programmer sangatlah penting, khususnya bagi programmer yang telah lama menggunakan bahasa pemrograman C dan C++.
4. Dukungan untuk
internasionalisasi (multi-language) juga sangat penting. 5. C# ditujukan agar cocok
digunakan untuk menulis program aplikasi baik dalam sistem klien-server (hosted system) maupun sistem embedded (embedded system), mulai dari perangkat lunak yang sangat besar yang menggunakan sistem operasi yang canggih hingga kepada perangkat lunak yang sangat kecil yang memiliki fungsi-fungsi terdedikasi. dan ukuran perangkat lunak yang dibuat dengan menggunakan bahasa pemrograman C dan bahasa rakitan.
62. Bahasa C# harus mencakup pengecekan jenis (type checking) yang kuat, pengecekan larik (array), pendeteksian terhadap percobaan terhadap penggunaan Variabel
-variabel yang belum
diinisialisasikan, portabilitas kode sumber, dan pengumpulan sampah (garbage collection) secara otomatis.
63.
3. PERANCANGAN ALAT 64.
65. 3.1 Perancangan Sistem Mekanik
66.
67. Pengendalian conveyor
menggunakan sebuah konveyor. Bahan
prototipe yang digunakan sama. Bagian-bagian dari prototipe konveyor yaitu rangka, poros dan sabuk (belt) konveyor.
68.
69. Motor DC dipasangkan pada rangka konveyor yang letaknya pada kaki rangka di bagian poros pengerak. Motor DC dipasang pada kaki rangka melalui dudukan dari arkrilik. Supaya motor DC dapat terpasang kuat dudukan dari akrilik dihubungkan pada kaki rangka menggunakan baut dan mur. Skematis rakitan setelah pemasangan motor DC pada kaki rangka konveyor di bagian poros penggerak dapat dilihat pada gambar 6.
71.
Gambar 6. skematis rakitan setelah pemasangan motor DC pada kaki rangka
konveyor
72.
73. 3.2 Perancangan Elektronik
74. Pada bagian perancangan elektronik, penulis menggunakan sensor
Infrared sebagai sensor penanda adanya benda yang di deteksi oleh sensor dan akan mengirim sinyal ke micorokontroler arduino uno ATMega328, dan perangkat lunak sebagai penghitung objek benda yang berada di atas belt conveyor.
75. 76.
77.
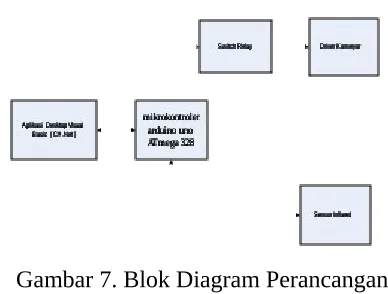
Gambar 7. Blok Diagram Perancangan Elektronik
78. Dari diagram blok pengoperasian
system konveyor untuk mengetahui barang hasil output produksi mengunakan Arduino uno terdiri dari beberapa blok rangkaian yang terdiri dari Sensor Infrared, Arduino uno ATMega328, Driver motor dan Aplikasi desktop C# .Net. Dalam rancangan ini system di nyala kan oleh user melalui
desktop, sehingga driver pada belt konveyor bergerak atas perintah dari user melalui
desktop dengan men klik aplikasi ON. Di saat itu pula sensor Infraredbekerja, Sensor
Infrareduntuk menginput perubahan tegangan ke sistem ADC. Perubahan yang diterima dalam bentuk data analog dan mengubah data analog menjadi data digital agar dapat diterima oleh mikrokontroler yang hanya menerima data digital. Mikrokontroler yang digunakan yaitu Arduino UNO R3 dengan Atmega328. Mikrokontroler yang digunakan ini diisikan dengan program yang nantinya akan ditampilkan pada layar komputer dengan C# .Net .
79.
80. 3.3 Driver relay 81.
82. Untuk mengendalikan motor dengan visual basic digunakanlah rangkaian driver relay, rangkaian ini sebagai kontak penghubung antara arduino uno dengan motor, sehingga motor biasa di nyalakan dengan visul basic melalui layar computer.
83.
Gambar 8. Rangkaian Driver Relay
Menentukan Ic
85.
86.
Menentukan hfe transistor 87.
88. Setelah arus beban yg akan dilewatkan pada transistor diketahui maka selanjutnya adalah menentukan transistor yg akan dipakai dgn syarat spt berikut :
89.
90. Menentukan Rb 91.
92. Setelah transistor yg akan dipakai sebagai saklar telah ditentukan maka selanjutnya adalah menentukan hambatan pada basis (Rb). Besarnya Rb ini dapat dicari dengan persamaan berikut :
93. 94. Diketahui : 95.
96. Vbb = 5V
97. RL = hambatan koil pada relay = 400
ohm 98.
99. Maka :
100. Sesuai dengan syarat pemilihan transistor diatas, dipakai transistor 2n3904 atau 2n222A yang mempunyai Icmax=200mA dan hfe=60~100. Dari sini,
kita dpt menentukan
101. IB untuk kondisi saturasi,
yaitu :
102.
103. Sehingg RB bisa kita cari,
yaitu : 104.
105.
Ib
=
200
100
=
2mA
Rb
=
5
−
0,6
0,002
A
=
2200
ohm
106. Maka didapat Resistor dapat 2200ohm karena di pasaran tidak banyak terdapat resistor dengan nilai tersebut maka penulis memutuskan memakai nilai 1K,
107.
108. Ada baiknya pula kita menambahkan dioda (1N4001). Dioda ini berfungsi sebagai proteksi transistor untuk menghubung singkat tegangan induksi yang mungkin terjadi saat peralihan kondisi dari on ke off.
109.
4. ANALISA DAN PENGUJIAN ALAT
110.
4.1. Pengujian Alat
Cara menjalankan konveyor
Infraredterlebih dahulu buka aplikasi di desktop computer yang bernama
Microsoft Visual Studio 2010, seperti pada gambar dibawah ini
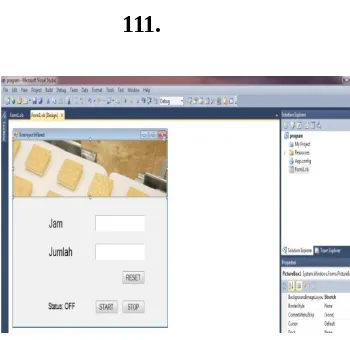
111.
Gambar 9.Program konveyor
Pada gambar 9, program masih dalam keaadaan status Off artinya motor konveyor belum berjalan dan sensor sudah aktif tetapi program belum bisa mengirim data ke visual basic.
112.
Gambar 10. Program konveyor
Infrared status On
Pada gambar 10, tombol start sudah di tekan status sudah On artinya motor sudah bergerah dan sensor sudah aktif kemudian program sudah bisa menerima data dari sensor.
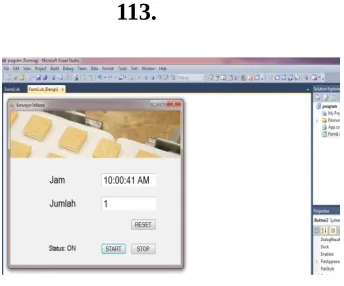
113.
Gambar 11. Program konveyor
Infrared bekerja
Pada gambar 11, sensor sudah bisa membaca data artinya barang yang melewati sensor sudah di tangkap dan dikirim ke visual basic sehingga tampilan jumlah menujukan angka 1.
Gambar 12. Program konveyor
Infrared bekerja menujukan angka 2
Pada gambar 12, sebuah barang dilewatkan lagi diatas konveyor dan terdeteksi oleh infared sehingga tampilan di layar berubah jumlahnya sekarang menjadi 2, dan seterusnya jika
Infraredmendapat terkena sebuah barang yang lewat dia atas konveyor makan jumlahnya akan bertamabah terus selama sistem belum di STOP.Untuk menormalkan kembali jumlahnya maka tekan reset, maka jumlah angkanya akan kembali ke 0.
4.2. ANALISA
114. Analisa hardware
dilakukan untuk mengetahui bagaimana kinerja hardware yang telah di rancang, pengujian ini meliputi Pengujian Rangkaian Arduino dengan sensor inflared. Sensor Infraredmerupakan sensor yang mendeteksi suatu perubahan pada kondisi fisik yang mendorong dan mengubah aktivitas yang dideteksi menjadi sinyal yang bisa dicatat atau direkam. Sensor ini menerima inputan mulai dari 1V sampai dengan 5V.
115.
5. KESIMPULAN
sensor Infrared bersamaan melalui layar monitor computer.
Relay di sini sangat penting karena digunakan untuk mengendalikan Sirkuit Tegangan tinggi dengan bantuan dari Signal Tegangan rendah.
Sistem yang digunakan pada laporan tugas akhir ini sangat bergantung pada nilai / input dari sensor Inflared, nilai tegangan input, dan hubungan antara hardware dan
sorfware. 116.
6. DAFTAR PUSTAKA 117.
[1] Geeetech. 2013. Arduino
Infraredproximity. From
http://www.geeetech.com/wiki/index .php/Arduino_Infrared_proximity_s witch_module, 20 Agustus 2014 [2] produksielektronik. 2013.
cara- prinsip-kerja-relay-fungsi-simbol-relay. From
http://www.produksielektronik.com/2013/10 /cara-prinsip-kerja-relay-fungsi-simbol-relay/, 25 Agustus 2014
118.
[3]
Forum Arduino. 2013.Controlling a 5v relay, only getting
2.4v?. From
http://forum.arduino.cc/index.php? topic=174122.0, 12 september 2014