PERANCANGAN DAN PEMBUATAN PLATFORM VALIDASI INERTIAL MEASUREMENT UNIT (IMU) - Diponegoro University | Institutional Repository (UNDIP-IR)
Teks penuh
Gambar

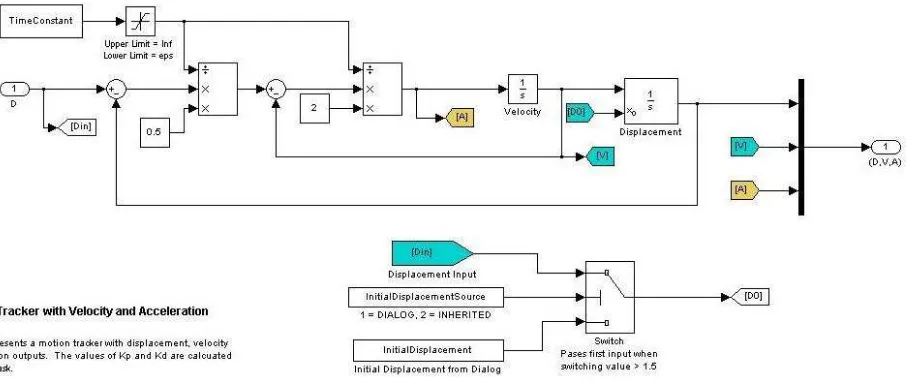
![Gambar D.2 Posisi [0 0 0] pada IMU Z](https://thumb-ap.123doks.com/thumbv2/123dok/2232243.1229618/14.595.207.438.318.432/gambar-d-posisi-pada-imu-z.webp)
Dokumen terkait
%HUGDVDUNDQKDVLOSHQJDPDWDQPHQXQMXNNDQ EDKZD SHQ\DNLW EHUFDN GDXQ \DQJ GLVHEDENDQ ROHKFHQGDZDQ 'PXWLOD SDOLQJOXDVVHEDUDQQ\D 6HUDQJDQ
In the second half of the twentieth century, in line with the formation of one single district in southeast Sulawesi, another identity was introduced for the Blacksmith
[r]
Jika biaya perolehan lebih rendah dari bagian Perusahaan atas nilai wajar aset dan kewajiban yang dapat diidentifikasi yang diakui pada tanggal akuisisi (diskon atas akuisisi),
However the more recent Forest Policy of 2 000, along with the Collaborative Forests Management Plan (CFMP ) in 2 003, discourage the handover of national forest to communities in
Dalam Aplikasi Informasi ini penulis menggunakan Macromedia Flash MX dimana pesan kesehatan ini bertujuan untuk mencegah penyebaran HIV/AIDS agar tidak bertambah banyak lagi
Tujuan penelitian ini adalah untuk melihat perbedaan kinerja pada usaha mikro sebelum dan sesudah kredit dari Bank Mestika di kota Perdagangan ditinjau dari
Melalui penulisan ilmiah ini yang berjudul aplikasi penjualan pada toko Victory lite diharapkan pengolahan data penjualan dilakukan dengan cepat dan akurat. Aplikasi ini
