TUGAS AKHIR
PROTOTYPE SISTEM KENDALI OTOMATIS ROBOT
MOBIL UNTUK PARKIR PINTAR MENGGUNAKAN
KOMUNIKASI NIRKABEL
I GEDE PANDE MASTRA SEDANA
JURUSAN TEKNIK ELEKTRO DAN KOMPUTER
FAKULTAS TEKNIK UNIVERSITAS UDAYANA BUKIT
JIMBARAN
2016
TUGAS AKHIR
PROTOTYPE SISTEM KENDALI OTOMATIS ROBOT
MOBIL UNTUK PARKIR PINTAR MENGGUNAKAN
KOMUNIKASI NIRKABEL
I GEDE PANDE MASTRA SEDANA 1204405012
JURUSAN TEKNIK ELEKTRO DAN KOMPUTER
FAKULTAS TEKNIK UNIVERSITAS UDAYANA BUKIT
JIMBARAN
2016
LEMBAR PERNYATAAN ORISINALITAS
Tugas Akhir/Skripsi ini adalah hasil karya saya sendiri, dan semua sumber baik yang dikutip maupun dirujuk
telah saya nyatakan dengan benar.
Nama : I GEDE PANDE MASTRA SEDANA
NIM : 1204405012
Tanda Tangan :
Tanggal : 20 Mei 2016
PROTOTYPE SISTEM KENDALI OTOMATIS ROBOT
MOBIL UNTUK PARKIR PINTAR MENGGUNAKAN
KOMUNIKASI NIRKABEL
Tugas Akhir Diajukan Sebagai Prasyarat
untuk Memperoleh Gelar Sarjana S1 (Strata 1) pada
Jurusan Teknik Elektro dan Komputer Fakultas Teknik Universitas Udayana
I GEDE PANDE MASTRA SEDANA 1204405012
JURUSAN TEKNIK ELEKTRO DAN KOMPUTER
FAKULTAS TEKNIK UNIVERSITAS UDAYANA BUKIT
JIMBARAN
2016
Lembar Pengesahan
Tugas Akhir ini diajukan oleh :
Nama : I Gede Pande Mastra Sedana
NIM : 1204405012
Jurusan : Teknik Elektro
Judul Skripsi : PROTOTYPE SISTEM KENDALI OTOMATIS ROBOT MOBIL
UNTUK PARKIR PINTAR MENGGUNAKAN KOMUNIKASI
NIRKABEL
Telah berhasil dipertahankan di hadapan Dewan Penguji dan diterima sebagai bagian persyaratan yang diperlukan untuk memperoleh gelar Sarjana Teknik
(ST) pada Jurusan Teknik Elektro, Fakultas Teknik, Universitas Udayana
DEWAN PENGUJI
Pembimbing I : Ngurah Indra ER, ST. MSc. ( )
Pembimbing II : Ir. Linawati,M.Eng.Sc., Ph.D ( )
Penguji : Dr. Nyoman Putra Sastra, ST., MT. ( )
Penguji : Dr. I Made Oka Widyantara, ST., MT. ( )
Penguji : Dr. Nyoman Gunantara, ST., MT. ( )
Ditetapkan di : Denpasar
Tanggal : 27 Mei 2016
Mengetahui
Ketua Jurusan Teknik Elektro
Wayan Gede Ariastina NIP : 196904131994121001
UCAPAN TERIMAKASIH
Om Swastyastu puji syukur kehadapan Ida SangHyang Widhi Wasa/Tuhan
Yang Maha Esa, karena atas segala limpahan berkat dan Rahmat-Nya, sehingga
tugas akhir yang berjudul “Prototype Sistem Kendali Otomatis Robot Mobil Untuk Parkir Pintar Menggunakan Komunikasi Nirkabel” ini dapat diselesaikan dengan tepat waktu. Tugas akhir ini disusun untuk memenuhi salah satu syarat
dalam menyelesaikan pendidikan sarjana strata satu (S1) pada Jurusan Teknik
Elektro Fakultas Teknik Universitas Udayana.
Dalam penyusunan tugas akhir ini, penulis banyak memperoleh petunjuk dan
bimbingan dari berbagai pihak. Sehingga pada kesempatan ini perkenankan saya
mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Bapak Ir. Ngakan Putu Gede Suardana, MT, Ph.D selaku Dekan Fakultas Teknik Universitas Udayana.
2. Bapak Wayan Gede Ariastina, S.T., M.Eng.Sc., Ph.D. selaku ketua jurusan
Teknik Elektro Fakultas Teknik Universitas Udayana.
3. Bapak Ngurah Indra ER, ST. MSc. Selaku dosen pembimbing I yang telah banyak memberikan arahan, waktu, semangat serta saran-saran selama
penyusunan laporan.
4. Ibu Ir. Linawati,M.Eng.Sc., Ph.D Selaku dosen pembimbing II yang telah banyak memberikan arahan, waktu, semangat serta saran-saran selama
penyusunan laporan.
5. Bapak, Ibu dan keluarga terima kasih atas do’a, dukungan, serta saran-saran
yang selalu diberikan.
6. Rekan - rekan mahasiswa UKM Robotic of Technology Universitas Udayana.
7. Serta semua pihak yang tidak bisa penulis sebutkan satu-persatu atas bantuan
dan saran yang diberikan sehingga laporan ini bisa selesai tepat pada
waktunya.
Penulis menyadari bahwa laporan ini masih jauh dari sempurna. Oleh karena itu
segala kritik dan saran yang bersifat membangun sangat diharapkan demi
kesempurnaan tugas akhir ini.
Akhir kata, penulis mohon maaf kepada semua pihak jika dalam pembuatan
tugas akhir ini melakukan kesalahan baik disegaja maupun tidak disengaja. Semoga
Ida SangHyang Widhi Wasa/Tuhan Yang Maha Esa selalu melimpahkan rahmat-Nya
kepada semua pihak yang telah membantu pelaksanaan dan penyelesaian laporan
tugas akhir ini.
Bukit Jimbaran, 20 Mei 2016
I Gede Pande Mastra Sedana
Nim: 1204405012
ABSTRAK
Teknologi robotika telah berkembang pesat untuk membantu kerja masyarakat dengan mesin sesuai kebutuhan. Sesuai tujuan dasar dari pengembangan teknologi robotika yaitu untuk membantu manusia dalam mengerjakan pekerjaan yang membutuhkan keakuratan tinggi, memiliki resiko tinggi, dan pekerjaan yang dilakukan berulang-ulang. Salah satu aplikasi teknologi robotika yang berhubungan dengan sistem kontrol adalah prototype dari sistem kendali otomatis robot mobil untuk parkir pintar menggunakan komunikasi nirkabel. Sistem ini menggunakan bluetooth HC-05 berbasis sistem kontrol ATmega32.
Bluetooth HC-05 bertindak sebagai media komunikasi nirkabel yang menghubungkan robot mobil dengan smartphone. Sistem kontrol Atmega32 pada robot mobil menerima data input melalui sensor jarak, sensor garis, tombol dan smartphone. Hasil yang telah diproses pada sistem kontrol robot mobil ditransmisikan kembali ke smartphone. Sistem kontrol pada robot mobil dapat mengendalikan driver motor sehingga motor dc berputar dan robot mobil bergerak. Motor dc merupakan bagian dari robot mobil yang memungkinkan mobil tersebut untuk bergerak dan bermanuver.
Hasil akhir yang dicapai melalui penelitian ini adalah sistem komunikasi nirkabel yang dapat mengkontrol pergerakan pada robot mobil, membaca jarak pada sisi depan robot mobil, kiri dan kanan, membaca nilai dari sensor garis robot mobil, bergerak maju, mundur, berbelok ke kiri dan kanan sesuai dengan data yang diterima sensor. Pergerakan dari robot mobil dapat diatur baik secara manual maupun otomatis.
Kata kunci : Prototype Parkir Pintar, Robot Mobil, Microcontroller ATmega32, Bluetooth HC-05
ABSTRACT
Robotics technology have evolve rapidly to assist society using machines according to the needs. The basic purpose of robotics technology development is to help or to assist human on certain task which need high accuracy, risky, or jobs with repetition. One robotics technology application that closely related to control system is prototyping of Car Robot Automatic System for Smart Parking implementing Wireless Communication.
The system used HC-05 Bluetooth based on ATmega32 microcontroller controlling system. HC-05 Bluetooth acted as wireless communication media that connect the car robots and the smartphone. ATmega32 microcontroller on the robot receive inputs from range sensor, line sensor, push button, and smartphone. The processed result of the car robot microcontroller transmit back to the smartphone, and the microcontroller on the car robot controlled the motor driver so the DC motor and the wheels on the car robot moved. DC motor is a part of the car robot which enabling them to move and maneuver.
The final result achieved in this research are wireless communication system that can control the movement of the car robot, read ranges of the front, left and right side, read the value of the line sensor, move forward, backward, turn left and right according to the sensor data. This movement by the car robot can be execute manually and also automatically.
Keywords: Smart Parking Prototype, Car Robot, Microcontroller ATmega32, Bluetooth HC-05
DAFTAR ISI
Halaman Sampul Depan ... i
Halaman Sampul Dalam ... ii
Halaman Pernyataan Orisinalitas ... iii
Halaman Persyaratan Gelar ... iv
Halaman Persetujuan Pembimbing ... v
Ucapan Terima Kasih ... vi
Halaman Abstrak Indonesia ... viii
Halaman Abstrak Inggis ... ix
Halaman Daftar Isi ... x
Halaman Daftar Tabel ... xiii
Halaman Daftar Gambar ... xvii
Halaman Daftar Arti Lambang, Singkatan, dan Istilah ... xviii
Halaman Daftar Lampiran ... xix
BAB I PENDAHULUAN 1.1 Latar Belakang ... 1
1.2 Rumusan Masalah ... 2
1.3 Tujuan Penelitian ... 2
1.4 Manfaat Penelitian ... 3
1.5 Batasan Masalah ... 3
BAB II TINJAUAN PUSTAKA 2.1 State Of Art ... 4
2.2 Robot Mobil ... 5
2.3 Komponen Elektronika ... 6
2.3.1 Mikrokontroler ... 6
2.3.2 Regulator ... 10
2.3.3 LCD ((Liquid Crystal Display) ... 12
2.3.4 Sensor Jarak SRF-04 ... 13
2.3.5 Sensor Garis Photodioda ... 14
2.3.6 Bluetooth HC-05 ... 15
2.3.7 Modul Driver Motor L293D ... 17
2.4 Komponen Penggerak ... 19
2.5 Basic Compiler (Bascom) ... 20
2.6 Mit App Inventor ... 23
BAB III METODE PENELITIAN 3.1 Lokasi dan Waktu Penelitian ... 24
3.2 Sumber dan Jenis Data Penelitian ... 24
3.2.1 Sumber Data ... 24
3.2.2 Metode Pengumpulan Data ... 24
3.2.3 Jenis data ... 24
3.3 Perangkat Keras ... 25
3.4 Instrumen Penelitian (Peralatan Kerja) ... 26
3.5 Prosedur Penelitian ... 26
3.5.1 Langkah-Langkah Penelitian ... 26
3.5.2 Perangkat Lunak... 27
3.5.2.1Skema rangkaian pada Software Eagle 6.0. ... 28
3.5.2.2Layout PCB pada Diptrace ... 29
3.5.2.3Program robot mobil pada Basic Compiler AVR ... 30
3.5.2.4Membuat desain dari body menggunakan Coreldraw. ... 31
3.5.2.5Mengirim dan menerima data dari software Roboremo .... 32
3.5.2.6Konfigurasi HC-05 dengan Arduino Serial ... 33
3.5.2.7Mit App Inventor untuk membuat software ... 34
3.5.2.8Microsoft Visio untuk memodelkan ... 35
3.5.3 Perancangan Perangkat Keras ... 36
3.5.3.1Gambaran Umum Sistem Kendali Mobile Robot ... 36
3.5.3.2Perancangan Blok – Blok Perangkat Keras ... 39
3.5.3.3Perancangan Rangkaian Minimum Sistem ATMega32 ... 39
3.5.3.4Perancamgan Rangkaian Power Supply ... 41
3.5.3.5Perancangan Rangkaian LCD ... 42
3.5.3.6Perancangan Rangkaian Push Button ... 44
3.5.3.7Rangkaian Modul Driver H-Bridge ... 46
3.5.3.8Rangkaian Sensor Jarak SRF04 ... 49
3.5.3.9Rangkaian Bluetooth HC-05 ... 52
3.5.3.10Rangkaian Sensor Garis Photodioda ... 54
3.6 Ilustrasi Cara Kerja Mobile Robot Dengan Sistem Kendali Wireless ... 56
3.7 Comand dan Step ... 58
3.8 Desain Database Visual Pada Aplikasi Android ... 60
3.9 Simulasi pengujian ... 65
3.9.1 Simulasi Pengujian Robot Mobil ke-1 Pada Lintasan... 68
3.9.2 Simulasi Pengujian Robot Mobil ke-2 Pada Lintasan... 68
3.9.3 Simulasi Pengujian Robot Mobil ke-3 Pada Lintasan... 69
3.9.4 Simulasi Pengujian Robot Mobil ke-4 Pada Lintasan... 69
3.9.5 Simulasi Pengujian Robot Mobil ke-5 Pada Lintasan... 70
3.9.6 Simulasi Pengujian Robot Mobil ke-6 Pada Lintasan... 70
BAB IV HASIL DAN PEMBAHASAN 4.1 Realisasi Hasil Perancangan Sistem Kendali Robot Mobil ... 72
4.2 Pengujian dan Pembahasan Perancangan Sistem Kendali Robot Mobil ... 73
4.3 Pengujian dan Pembahasan Rangkaian Input Regulator ... 74
4.4 Pengujian dan Pembahasan Rangkaian Lcd ... 78
4.5 Pengujian dan Pembahasan Push Button ... 81
4.6 Pengujian dan Pembahasan Sensor Srf04 ... 86
4.7 Pengintegrasian Atmega32 Dengan Sensor Garis Photodioda ... 93
4.8 Pengintegrasian Atmega32 Dengan Bluetooth Hc-05 ... 99
4.9 Pengujian Pengintegrasian Atmega32 Dengan Smartphone... 102
4.10 Pengintegrasian Atmega32 Dengan Driver Motor L293d ... 107
4.11 Keseluruhan Sistem Kendali Robot Mobil ... 114
4.11.1 Pengujian Kendali Robot Mobil Pada Smartphone ... 114
4.11.2 Pengujian Kendali Robot Mobil Pada Rute Pengujian ... 123
4.11.2.1 Simulasi Pengujian Robot Mobil ke-1 Pada Lintasan ... 126
4.11.2.2 Simulasi Pengujian Robot Mobil ke-2 Pada Lintasan ... 128
4.11.2.3 Simulasi Pengujian Robot Mobil ke-3 Pada Lintasan ... 130
4.11.2.4 Simulasi Pengujian Robot Mobil ke-4 Pada Lintasan ... 132
4.11.2.5 Simulasi Pengujian Robot Mobil ke-5 Pada Lintasan ... 134
4.11.2.6 Simulasi Pengujian Robot Mobil ke-6 Pada Lintasan ... 136
4.12 Penggunaan Daya Keseluruhan Sistem Kendali Robot Mobil ... 139
4.13 Akurasi Posisi Sistem Kendali Robot Mobil ... 142
BAB V PENUTUP Simpulan ... 144
Saran ... 145
DAFTAR PUSTAKA ... 146
DAFTAR TABEL
2.1 Fungsi Khusus Port B ... 9
2.2 Fungsi Khusus Port C ... 9
2.2 Fungsi Khusus Port D ... 10
2.4 Interface Pin Header Modul Driver H-Bridge ... 18
2.5 Tipe Data Pada BASCOM AVR ... 22
3.1 Interface Pin Header Modul Driver H-Bridge Dengan Mikrokontroler ... 47
3,2 Menentukan Arah Putaran Motor Dc ... 47
4.1 Spesifikasi Dari Robot Mobil ... 74
4.2 Hasil Pengujian Tegangan Input Baterai... 60
4.3 Hasil Pengujian Tegangan Regulator ... 62
4.4 Hasil Pengujian LCD Display 16x2 ... 64
4.5 Hasil Pengujian Tegangan Push Button ... 68
4.6 Hasil Pengukuran Terhadap Penghalang Oleh Sensor SRF04 ... 93
4.7 Hasil Pengujian Sensor Garis Terhadap Beberapa Warna Yang Berbeda ... 78
4.8 Hasil pengujian nilai ADC sensor Garis Robot Mobil ... 99
4.9 Hasil Pengujian Hiperterminal Terhadap LCD Display Robot Mobil ... 106
4.10 Pengujian Robot Mobil Dengan Smartphone Pada Kondisi Line Of Sight ... 107
4.11 Data Dari Robot dan Perintah Program Di Dalam Robot ... 114
4.12 Fungsi Dan Penjelasan Masing-Masing Tombol ... 117
4.13 Hasil Pengujian Manual Di Lintasan Tanpa Halangan Trisna Dharmayanti .... 125
4.14 Hasil Pengujian Manual Di Lintasan Tanpa Halangan Rendi Diksa ... 126
4.15 Hasil Pengujian Robot MobilDi Lintasan percobaan 1 ... 128
4.16 Hasil Pengujian Robot MobilDi Lintasan percobaan 2 ... 130
4.17 Hasil Pengujian Robot MobilDi Lintasan percobaan 3 ... 132
4.18 Hasil Pengujian Robot MobilDi Lintasan percobaan 4 ... 134
4.19 Hasil Pengujian Robot MobilDi Lintasan percobaan 5 ... 136
4.20 Hasil Pengujian Robot MobilDi Lintasan percobaan 6 ... 138
DAFTAR GAMBAR
2.1 Konfigurasi Pin AVR Atmega32 ... 8
2.2 Konfigurasi Pin IC Regulator 78xx ... 11
2.3 LCD Modul Seiko M1632 ... 12
2.4 Sensor SRF04 ... 13
2.5 Proses Konversi Analog to Digital ... 15
2.6 Modul Bluetooth Hc-05... 16
2.7 Pin Out Modul Bluetooth Hc-05 ... 16
2.8 Pin Konfigurasi Ic L293d ... 18
2.9 Sinyal Pwm ... 19
2.10 Kaidah Tangan Kanan ... 20
2.11 Cara Kerja Motor Dc ... 20
2.12 Tampilan Dari Lembar Kerja Mit App Inventor ... 23
3.1 Tampilan software Eagle 6.0 ... 29
3.2 Skema rangkaian robot mobil pada software Eagle 6.0 ... 20
3.3 Software Diptrace... 30
3.4 Layout rangkaian robot mobil pada Software Diptrace ... 31
3.5 Tampilan Awal Software Basic Compiler AVR ... 31
3.6 Tampilan program pada Basic Compiler ... 32
3.7 Tampilan Awal Software CorelDraw ... 32
3.8 Tampilan Software CorelDraw Design Body Robot ... 32
3.9 Tampilan Software Roboremo ... 33
3.10 Menu yang dapat ditambahkan pada software roboremo ... 33
3.11 Arduino Software ... 34
3.12 Arduino Serial Software ... 34
3.13 Mit App Inventor Software ... 35
3.14 Mit app inventor drag-drops “blok” ... 35
3.15 Visual Blocks Programing pada Mit Appinventor ... 36
3.16 Microsoft Visio ... 36
3.17 Ilustrasi Sistem Kendali Robot Mobil ... 37
3.18 Diagram Blok Sistem Kendali Robot Mobil ... 38
3.19 Rangkaian Minimum Sistem Atmega32 ... 41
3.20 Ilustrasi rancangan regulator 7809 dan 7805 ... 42
3.21 Skema Rangkaian Regulator 7805 dan 7809 ... 42
3.22 Perancangan Rangkain Lcd dan Mikrokontroler ... 43
3.23 Ilustrasi push button saat ditekan dan tidak ditekan ... 45
3.24 Rangkaian Push Button B4 dan A5 ... 45
3.25 Interface Modul Driver H-Bridge Dengan Mikrokontroler Atmega32 ... 48
3.26 Gambar ilustrasi SRF04 ... 50
3.27 Rangkaian Interface Sensor SRF04 ... 50
3.28 Ilustras Rangkaian Bluetooth HC-05 ... 53
3.29 Bluetooth HC-05 ilustrasi ... 53
3.30 Cara Kerja Dari Rangkaian Sensor Garis Photodioda. ... 55
3.31 Skema Dari Rangkaian Sensor Garis Photodioda ... 55
3.32 Ilustrasi Cara Kerja Sistem Kendali Mobile Robot... 57
3.33 Hc-05 Terpasang Dengan Perangkat ... 58
3.34 Tampilan Web Server Mit App Inventor ... 61
3.35 Tampilan Project Name Mit App Inventor ... 61
3.36 Lembar Kerja Mit App Inventor ... 62
3.37 Ilustrasi Design Sistem Kendali Mobile Robot ... 62
3.38 Blocks Secara Keseluruhan Software Robot Mobil ... 63
3.39 Rute Atau Lintasan Simulasi Tanpa Halangan ... 66
3.40 Metode Telusur Kanan Pada Saat Menelusuri Ruangan ... 67
3.41 Metode Telusur Kiri Pada Saat Menelusuri Ruangan ... 68
3.42 Simulasi Pengujian Robot Mobil ke-1 Pada Lintasan ... 69
3.43 Simulasi Pengujian Robot Mobil ke-2 Pada Lintasan ... 69
3.44 Simulasi Pengujian Robot Mobil ke-3 Pada Lintasan ... 70
3.45 Simulasi Pengujian Robot Mobil ke-4 Pada Lintasan ... 70
3.46 Simulasi Pengujian Robot Mobil ke-5 Pada Lintasan ... 71
3.47 Simulasi Pengujian Robot Mobil ke-6 Pada Lintasan ... 71
4.1 Pande Software Android (Bluetooth Control)... 73
4.2 Prototype Keseluruhan (Robot Mobil) ... 73
4.3 Lokasi Pengujian Tegangan pada Robot Mobil ... 75
4.4 Skema Rangkaian Regulator 7805 Dan 7809 ... 75
4.5 Pengujian Nilai Tegangan Baterai ... 76
4.6 Lokasi pengujian tegangan regulator 7809 dan regulator7805 ... 77
4.7 Pengujian Tegangan Regulator 7805 ... 77
4.8 Pengujian Tegangan Regulator 7809 ... 78
4.9 Gambar 16x2 LCD ... 79
4.10 Diagram Blok Pengujian Lcd ... 79
4.11 Tampilan Kalimat Pada Pengujian Lcd... 81
4.12 Diagram Blok Pengujian Push Button ... 82
4.13 Ilustrasi Pengujian Push Button ... 82
4.14 Tombol Push Button ... 83
4.15 Pengujian Pengukuran Tegangan Push Button Sebelum Ditekan... 85
4.16 Pengujian Pengukuran Tegangan Push Button Saat Ditekan ... 86
4.17 Ilustrasi Sensor SRF04 ... 87
4.18 Diagram Blok Pengujian Sensor SRF04 ... 87
4.19 Hasil Pengukuran Jarak Sensor SRF04 Dengan Penggaris... 92
4.20 Ilustrasi pembacaan sensor garis ... 94
4.21 Rangkaian Sensor Garis Photodiode ... 95
4.22 Hubungan Iluminasi terhadap tegangan pada Sensor Garis Photodiode ... 95
4.23 Sensor Garis Mendeteksi Warna Terang ... 97
4.24 Sensor Garis Mendeteksi Warna Gelap ... 98
4.25 Blok Diagram Bluetooth HC-05 ... 100
4.26 HC-05 terpasang dengan perangkat ... 101
4.27 Software Terminal Arduino Bluetooth Control ... 103
4.28 Data Hiperterminal “a” Dikirim Ke Robot Mobil ... 105
4.29 Data Hiperterminal “A” Dikirim Ke Robot Mobil ... 106
4.30 Diagram Blok Pengujian Logika Input Modul Driver H-Bridge ... 108
4.31 MIT App Inventor ... 115
4.32 New Project MIT App Inventor ... 115
4.33 Tampilan Kendali Robot Mobil Pada Smartphone ... 116
4.34 Gambar Blocks Untuk Software Pada Smartphone ... 118
4.35 Simulasi Pengujian Di Lintasan Tanpa Halangan ... 124
4.36 Pengujian Pertama Manual Di Lintasan Tanpa Halangan ... 125
4.37 Pengujian Kedua Manual Di Lintasan Tanpa Halangan ... 126
4.38 Simulasi Pengujian Robot Mobil Saat Parkir Di Lintasan Tanpa Halangan ... 127
4.39 Pengujian percobaan 1 ... 127
4.40 Simulasi Pengujian Robot Mobil ke-2 Pada Lintasan... 129
4.41 Pengujian percobaan 2 ... 129
4.42 Simulasi Pengujian Robot Mobil ke-3 Pada Lintasan... 131
4.43 Pengujian percobaan 3 ... 131
4.44 Simulasi Pengujian Robot Mobil ke-4 Pada Lintasan... 133
4.45 Pengujian percobaan 4 ... 133
4.46 Simulasi Pengujian Robot Mobil ke-5 Pada Lintasan... 135
4.47 Pengujian percobaan 5 ... 135
4.48 Simulasi Pengujian Robot Mobil ke-62 Pada Lintasan... 137
4.49 Pengujian percobaan 6 ... 137
xviii
DAFTAR SINGKATAN
ADC = Analog Digital Converter ALU = Arithmetic Logic Unit
ASCII = American Standard Code for Information Interchange AVR = Alf and Vegard RISC
ISP = In-System Programing
IDE = Integrated Development Environment LCD = Liquid Crystal Display
MAC = Media Access Control
MIPS = Million Instruction Per-Second MISO = Master Input/Slave Output MOSI = Master Output/Slave Input PCB = Printing Circuit Board PC = Personal Computer
PID = Proportional Integral Derivative PV = Present Value
RF = Radio Frequency
PWM = Pulse Width Modulation RW = Register Write
RPM = Rotation Per-Minute RX = Receiver
RST = Reset
SCK = Serial Clock
SPI = Serial Peripheral Interface TX = Transmitter
TQFP = Thin Quad Flat Pack UAV = Unmanned Aerial Vehicle
USRAT = Universal Syncronous Asyncronous Receiver/Transmitter UART = Universal Asyncronous Receiver/Transmitter
USB = Universal Serial Bus VCC = Voltage Common Collector
DAFTAR LAMPIRAN
Lampiran 1 Jadwal Kegiatan ... A Lampiran 2 Rincian Biaya ... B Lampiran 3 Listing Program Pada Basic Compiler (BASCOM AVR) ... C Lampiran 4 Datasheet HC-05 Bluetooth to Serial Port Module ... D Lampiran 5 Datasheet Mikrokontroler ATmega32 ... E Lampiran 6 Datasheet Ultrasonic SRF04 ... F Lampiran 7 Datasheet L293x Quadruple Half-H Driverr ... G Lampiran 8 Datasheet 7805 dan 7809 ... H Lampiran 9 Datasheet 16x2 LCD ... I Lampiran 10 Biodata Diri ... J
BAB I PENDAHULUAN
1.1 Latar Belakang
Teknologi robotika berkembang dengan sangat pesat, dimana hampir
keseluruhan kehidupan masyarakat dimudahkan dengan hadirnya mesin robot
yang dapat dipekerjakan sesuai dengan kebutuhan. Utamanya dalam industri
bidang otomotif yang dapat melakukan pengembangan aplikasi robotika. Oleh
karenanya timbul ide untuk mengembangkan teknologi terutama di bidang
robotika, yakni robot mobil nirkabel.
Perkembangan teknologi pada smartphone juga sangat pesat, dimana
berbagai aplikasi yang terdapat di dalamnya dapat diaplikasikan pada bidang
robotika, khususnya teknologi telekomunikasi nirkabel. Komunikasi nirkabel
adalah sistem komunikasi pada suatu jaringan yang menggunakan gelombang
radio sebagai media transmisi.
Robot mobil pada umumnya telah dapat dikendalikan menggunakan remote
control (RC) secara nirkabel, namun tidak dilengkapi dengan fungsi deteksi jarak
penghalang disekitarnya. Deteksi jarak terhadap penghalang merupakan fungsi
penting yang harus dimiliki untuk dapat bergerak, mengetahui adanya penghalang,
menghindari, dan bergerak ke posisi yang diinginkan. Untuk mencapai
kemampuan tersebut maka akan diintegrasikan sistem kontrol ATmega32 dengan
sensor jarak, bluetooth, sensor garis, dan motor driver pada robot mobil.
Selanjutnya akan diintegrasikan pula software pada smartphone yang digunakan
sebagai pengendali pengganti remote control biasa, yang juga berfungsi sebagai
sarana komunikasi dengan robot mobil. Smartphone dapat digunakan sebagai
sarana kendali posisi dari robot mobil untuk mencari posisi parkir dan dapat
menjadi sarana komunikasi data yang dapat dilakukan melalui smartphone
Akhirnya akan diperlihatkan bagaimana kinerja sistem parkir pintar yang
telah diintegrasikan pada robot mobil ditinjau dari akurasi posisi ketika sistem
dikendalikan secara manual maupun otomatis.
2
Robot mobil merupakan aplikasi yang dirancang agar tercipta suatu sistem
parkir pintar yang memanfaatkan sensor dengan menggunakan komunikasi
nirkabel bluetooth series HC-05 berbasis sistem kontrol ATmega32. Perangkat
bluetooth series HC-05 nantinya akan bertindak sebagai media komunikasi
nirkabel yang mengirimkan data dari smartphone sesuai dengan instruksi menuju
ke rangkaian robot mobil (transciever).
Diharapkan hasil penelitian sistem parkir pintar robot mobil dengan
memanfaatkan sensor jarak dan menggunakan komunikasi Bluetooth Series
HC-05 berbasis system kontrol ATmega32 ini, dapat digunakan untuk mengendalikan
robot mobil dalam pengambilan posisi pada tempat yang sulit dijangkau oleh mata
manusia. Pengambilan posisi ini bisa berupa posisi parkir di tempat yang sempit
pada suatu ruangan.
1.2 Rumusan Masalah
Berdasarkan latar belakang yang telah diuraikan, maka rumusan
permasalahan yang akan dibahas dalam penelitian ini adalah:
1. Bagaimana mengintegrasikan software pada smartphone agar dapat
dimanfaatkan untuk pengendalian dan komunikasi data sensor robot mobil?
2. Bagaimana mengintegrasikan ATmega32 dengan sensor jarak, bluetooth
HC-05, sensor garis dan motor driver pada robot mobil?
3. Bagaimana kinerja sistem parkir pintar pada robot mobil ditinjau dari
akurasi posisi ketika sistem dikendalikan manual dan otomatis?
1.3 Tujuan Penelitian
Adapun beberapa tujuan yang ingin dicapai penulis pada perancangan
penelitian ini adalah sebagai berikut:
1. Dapat membangun komunikasi dan mengintegrasikan software Pande
Bluetooth Control untuk komunikasi nirkabel Bluetooth HC-05 dalam
mengendalikan robot mobil berbasis mikrokontroler ATmega32.
2. Mengetahui tingkat akurasi pembacaan dari sensor jarak, tingkat akurasi
3
3. Menerapkan metode untuk pergerakan robot mobil dalam menelusuri jalan.
4.
Mengetahui kinerja sistem parkir pintar pada robot mobil ditinjau dari akurasi posisi ketika sistem dikendalikan manual dan otomatis.1.4 Manfaat Penelitian
Adapun manfaat dari penelitian ini adalah sebagai berikut:
1. Dapat mengendalikan robot mobil dalam pengambilan posisi pada
tempat-tempat yang menjadi tujuan parkir.
2. Dapat memperkaya pengetahuan pada bidang robotika, khususnya
pengaplikasian komunikasi nirkabel bluetooth pada robot mobil dan
smartphone.
3. Memperkaya pengetahuan di bidang rancang bangun sistem kendali.
4. Dapat membuat kenyamanan berkendara menjadi lebih baik apabila sistem
diterapkan pada mobil yang sebenarnya.
1.5 Batasan Masalah
Agar permasalahan tidak berkembang menjadi luas akibat timbulnya
permasalahan baru, maka perlu dilakukan batasan permasalahan sebagai berikut:
1. Plant yang dibuat adalah rancang bangun prototype robot mobil dengan
komunikasi nirkabel.
2. Mikrokontroler yang digunakan adalah mikrokontroler AVR ATmega32.
3. Komunikasi nirkabel menggunakan bluetooth HC-05.
4. Menggunakan software Basic Compiler (Bascom) AVR untuk
pemrograman mikrokontroler AVR ATmega32.
5. Menggunakan MITapp Inventor untuk membuat aplikasi pada android.
6. Menggunakan motor DC sebagai aktuator penggerak roda.
7. Lintasan robot mobil di buat datar, persegi dengan panjang sisi 120cm.
8. Sensor garis digunakan untuk membedakan jalan yang gelap dan jalan
terang
9. Menggunakan metode menghindari rintangan sederhana untuk menelusuri
lintasan.
BAB II
TINJAUAN PUSTAKA
2.1 State of The Art Review
Penelitian tentang robot mobil saat ini telah banyak dilakukan, terutama
yang berkaitan dengan perancangan perangkat keras serta metode pergerakan pada
robot mobil. Namun, dari penelitian tersebut belum ada yang melakukan
penelitian mengenai pengembangan pengendalian pergerakan robot mobil yang
secara mudah dapat dilakukan oleh setiap orang, karena sebagian besar robot
mobil saat ini dikendalikan dengan menggunakan remote control atau kendali
secara otomatis. Melalui penelitian mengenai prototype sistem kendali otomatis
robot mobil untuk parkir pintar menggunakan komunikasi nirkabel, diharapkan
mampu untuk mempermudah mengendalikan pergerakan dari robot mobil pada
saat menelusuri ruangan. Berikut ini beberapa referensi yang dapat dijadikan
acuan dalam menjelaskan mengenai penelitian tentang prototype sistem kendali
otomatis robot mobil.
1. Pada penelitian yang dilakukan oleh B.Ranga Raju yang di publish pada
sebuah jurnal penelitian dari Sri Vasavi Engineering College, Tadepalligudem,
India pada tahun 2014 yang berjudul “ARM7 Microcontroller based Robot
controlled by an Android mobile utilizing Bluetooth”, diperoleh bahwa dalam
penelitian ini penulis menggunakan remote control dari android yang berfungsi
untuk kendali wireless pada mobile robot sehingga memungkinkan mobile
robot mampu menerima perintah melalui android. (Raju, 2014).
2. Pada penelitian yang dilakukan oleh Ritika Pahuja yang di publish pada sebuah
jurnal penelitian dari BRCM College of Engineering & Technology, Bahal,
India pada tahun 2014 yang berjudul “Android Mobile Phone Controlled
Bluetooth Robot Using 8051 Microcontroller”, diperoleh bahwa dalam
penelitian ini penulis menggunakan bluetooth HC series sebagai receiver dan
pada smartphone digunakan Software Bluetooth RC Control yang sudah dapat
di download secara langsung di appstore yang berfungsi untuk kendali wireless
mobil robot (Pahuja, 2014).
5
2.2 Robot Mobil
Robot dalam segala bentuk dan fungsinya adalah salah satu hasil kemajuan
teknologi yang banyak membantu aktivitas manusia. Penggunaan tersebar dari
dunia militer, medis, sampai rumah tangga. Di dunia militer dan penanggulangan
bencana, fenomena ini umumnya didasari pada keinginan yang kuat untuk
mengurangi jumlah korban jiwa manusia pada berbagai tugas militer. Pada
kebutuhan industri dan rumah tangga pada umumnya penggunaan robot didorong
oleh keinginan untuk menjadikan robot sebagai pengganti pekerja manusia pada
hal-hal yang sesuai dan menuntut untuk hal tersebut. Robot mobil adalah bentuk
robot yang paling banyak digunakan pada kebutuhan rumah tangga dan bahkan
pada industri. Untuk dapat menjalankan tugasnya maka robot mobil yang
dirancang haruslah mampu melakukan hal-hal berikut:
1. Melakukan pergerakan secara autonomous/tanpa dikendalikan operator dengan
sistem navigasi yang dimilikinya.
2. Mencari atau mendeteksi obyek atau benda yang menjadi bagian dari tugasnya.
3. Melakukan tindakan terhadap obyek sesuai dengan fungsi dari robot tersebut
(Widodo, 2009).
Robot mobil adalah konstruksi robot yang ciri khasnya adalah mempunyai
aktuator berupa roda untuk menggerakkan keseluruhan badan robot tersebut,
sehingga robot tersebut dapat melakukan perpindahan posisi dari satu titik ke titik
yang lain. Robot mobil ini sangat disukai bagi orang yang mulai mempelajari
robot, hal ini karena membuat robot mobil tidak memerlukan kerja fisik yang
berat. Untuk dapat membuat sebuah robot mobil minimal diperlukan pengetahuan
tentang mikrokontroler dan sensor-sensor elektronik. Dasar dari robot mobil dapat
dengan mudah dibuat dengan menggunakan plywood/triplek, akrilik sampai
menggunakan logam (aluminium). Robot mobil dapat dibuat sebagai pengikut
garis (line follower) atau pengikut dinding (wall follower) ataupun pengikut
6
2.3 Komponen Elektronika 2.3.1 Mikrokontroler
Mikrokontroler adalah sebuah sistem mikroprosesor di mana didalamnya
sudah terdapat CPU, ROM, RAM, I/O, Clock dan peralatan internal lainya yang
sudah saling terhubung dan terorganisai (terlamati) dengan baik oleh pabrik
pembuatnya dan dikemas dalam satu chip yang siap pakai, sehingga kita hanya
perlu memprogram isi ROM sesuai aturan penggunaan oleh pabrik pembuatnya
(Winoto, 2008). Mikrokontroler berfungsi sebagai pusat pengolahan data dan
pengendali bagi perangkat lain seperti sensor. Salah satu mikrokontroler yang
banyak digunakan saat ini adalah mikrokontroler AVR (Alf and Vegard’s Risc
Processor). AVR adalah mikrokontroler dengan basis arsitektur AVR RISC
(Reduced Intrution Set Computer) 8 bit yang berdasarkan arsitektur Harvard, yang
dibuat oleh Atmel tahun 1996. Mikrokontroler AVR memiliki keunggulan
dibandingankan dengan mikrokontroler lainnya. Keunggulan mikrokontroler
AVR yaitu kecepatan dalam eksekusi program yang lebih cepat karena sebagian
besar instruksi dieksekusi dalam 1 siklus clock, lebih cepat dibandingkan dengan
mikrokontroler MCS51 yang memiliki arsitektur CISC (Complex Intruction Set
Computer) (Adrianto, 2008). Selain itu mikrokontroler AVR memiliki fitur
lengkap yaitu ADC Internal, PWM, EEPROM Internal, Port I/O, Komunikasi
Serial, I2C, timer/ counter, dan lain-lain (Ardika, 2013).
2.3.1.1 Mikrokontroller AVR ATmega32
ATmega32 merupakan jenis mikrokontroler AVR CMOS 8-bit yang
basis arsitektur AVR RISC (Reduced Intrution Set Computer). ATmega32
memiliki kelebihan yaitu mampu mencapai keluaran yang sepuluh kali lebih cepat
dibandingkan dengan mikrokontroler MCS51 dengan arsitektur CISC. Hal ini
karena ATmega32 mempunyai 32 register kerja dalam mikrokontroler terhubung
secara langsung pada Arithmetic Logic Unit (ALU) yang memungkinkan dua
register berbeda diakses pada satu instruksi yang dijalankan pada satu siklus
clock. ATmega32 mempunyai throughput mendekati 1 Million Instruction Per
Second (MIPS) per MHz, sehingga membuat konsumsi daya menjadi rendah
7
Programmable (ISP) Flash on-chip yang mengijinkan memori program untuk
diprogram ulang dalam sistem menggunakan hubungan Serial Peripheral Inteface
(SPI) (Surya.2011). Adapun beberapa keistimewaan dari AVR ATmega32 antara
lain:
1. Mikrokontroler AVR 8 bit yang memilliki kemampuan tinggi dengan konsumsi
daya rendah.
2. Arsitektur RISC dengan throughput mencapai 16 MIPS pada frekuensi
16MHz.
3. Memiliki kapasitas Flash memori 32 Kbyte, EEPROM 512 Byte dan SRAM 1
Kbyte.
4. Saluran I/O sebanyak 32 buah, yaitu Port A, Port B, Port C dan Port D.
5. CPU yang terdiri dari 32 buah register.
6. Unit interupsi dan eksternal.
7. Port USART untuk komunikasi serial.
8. Fitur peripheral
a. Tiga buah Timer/Counter dengan kemampuan perbandingan (compare)
1. Dua buah Timer/Counter 8 bit dengan Prescaler terpisah dan Mode
Compare.
2. Satu buah Timer/Counter 16 bit dengan Prescaler terpisah, Mode
Compare dan Mode Capture.
3. Real Time Counter dengan Oscillator tersendiri.
b. Empat kanal PWM
c. 8 kanal ADC
1. 8 Single-ended Channel dengan keluaran hasil konversi 8 dan 10 resolusi
(register ADCH dan ADCL).
2. 7 Diferrential Channel hanya pada kemasan Thin Quad Flat Pack
(TQFP).
3. 2 Differential Channel dengan Programmable Gain.
d. Antarmuka Serial Peripheral Interface (SPI) Bus.
e. Watchdog Timer dengan Oscillator Internal.
8
9. Non-volatile program memory (Pancev, 2014).
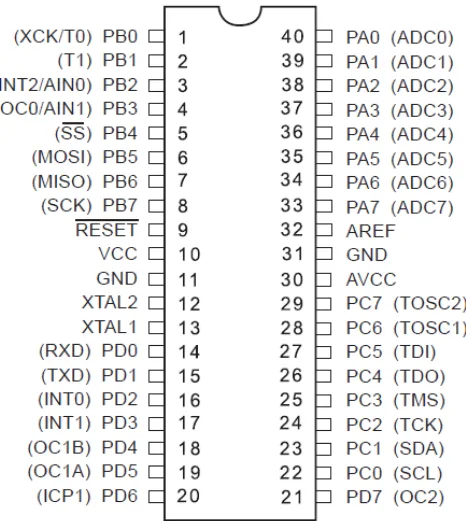
Berikut ini merupakan konfigurasi pin yang terdapat pada chip
mikrokontroller ATmega32:
Gambar 2.1 Konfigurasi PIN AVR ATmega32
(Sumber: datasheet ATmega32)
Konfigurasi pin ATmega32 dengan kemasan 40 pin Dual In-line
Package (DIP) dapat dilihat pada Gambar 2.1. Dari gambar diatas dapat
dijelaskan fungsi dari masing-masing pin ATmega32 sebagai berikut,
1. VCC merupakan pin yang berfungsi sebagai masukan catu daya.
2. GND merupakan pin Ground.
3. Port A (PA0 – PA7) merupakan pin input/output dua arah (full duplex) dan
selain itu merupakan pin masukan ADC.
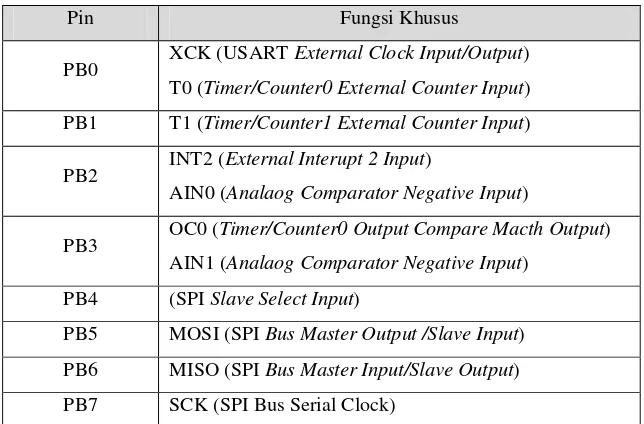
4. Port B (PB0 – PB7) merupakan pin input/output dua arah (full duplex) dan
9
Pin khusus Port B (PB0-PB7) yang merupakan pin input/output dua arah(full
duplex) dapat dilihat seperti dapat dilihat pada Tabel 2.1 dibawah ini.
Tabel 2.1 Fungsi khusus Port B (Sumber: datasheet ATmega32)
Pin Fungsi Khusus
PB0 XCK (USART External Clock Input/Output) T0 (Timer/Counter0 External Counter Input)
PB1 T1 (Timer/Counter1 External Counter Input)
PB2 INT2 (External Interupt 2 Input)
AIN0 (Analaog Comparator Negative Input)
PB3 OC0 (Timer/Counter0 Output Compare Macth Output) AIN1 (Analaog Comparator Negative Input)
PB4 (SPI Slave Select Input)
PB5 MOSI (SPI Bus Master Output /Slave Input)
PB6 MISO (SPI Bus Master Input/Slave Output)
PB7 SCK (SPI Bus Serial Clock)
5. Port C (PC0 – PC7) merupakan pin input/output dua arah (full duplex) dan
selain itu merupakan pin khusus, seperti dapat dilihat pada Tabel 2.2 dibawah
ini.
Tabel 2.2 Fungsi khusus Port C (Sumber: datasheet ATmega32)
Pin Fungsi Khusus
PC0 SCL (Two-wire Serial Bus Clock Line)
PC1 SDA (Two-wire Serial BusData Input/Output Line)
PC2 TCK (Joint Test Action Group Test Clock)
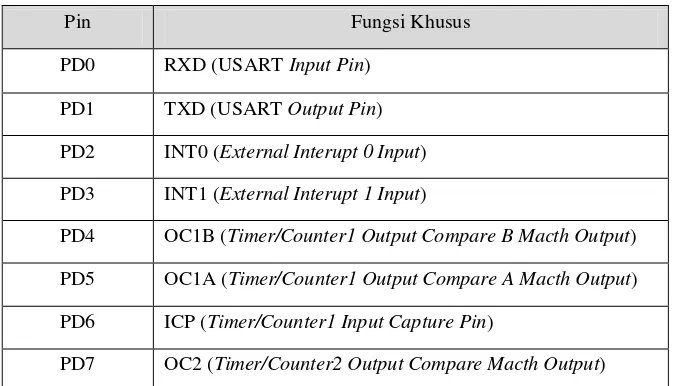
6. Port D (PD0 – PD7) merupakan pin input/output dua arah (full duplex) dan
10
merupakan pin input/output dua arah (full duplex) dapat dilihat seperti dapat
dilihat pada Tabel 2.3 dibawah ini.
Tabel 2.3 Fungsi Khusus Port D (Sumber: datasheet ATmega32)
Pin Fungsi Khusus
PD0 RXD (USART Input Pin)
PD1 TXD (USART Output Pin)
PD2 INT0 (External Interupt 0 Input)
PD3 INT1 (External Interupt 1 Input)
PD4 OC1B (Timer/Counter1 Output Compare B Macth Output)
PD5 OC1A (Timer/Counter1 Output Compare A Macth Output)
PD6 ICP (Timer/Counter1 Input Capture Pin)
PD7 OC2 (Timer/Counter2 Output Compare Macth Output)
7. RESET merupakan pin yang digunakan untuk me-reset mikrokontroler.
8. XTAL1 dan XTAL2, merupakan pin masukan external clock.
9. AVCC merupakan pin masukan tegangan untuk ADC.
10. AREF merupakan pin masukan tegangan referensi untuk ADC.
2.3.1.2 Komunikasi Serial USART
USART singkatan dari Universal Syncronous Asyncronous
Receiver/Transmiter. Pada mikrokontroler ATmega32 memiliki beberapa
kelebihan sistem USART yaitu:
1. Operasi full duplex (mempunyai register receiver dan transmitter yang
terpisah.
2. Operasi Syncronous dan Asyncronous.
3. Mendukung komunikasi multiprosesor.
4. Mode kecepatan transmisi berorde Mbps (Pancev, 2014).
2.3.2 Regulator
Regulator adalah rangkaian pembangkit tegangan yang merupakan
11
pengendali. IC Regulator atau yang sering disebut sebagai regulator tegangan
(voltage regulator) merupakan suatu komponen elektronik yang melakukan suatu
fungsi yang terpenting dan berguna dalam perangkat elektronik baik digital
maupun analog. Hal yang dilakukan oleh IC regulator ini adalah menstabilkan
tegangan yang melewati IC tersebut. Setiap IC regulator mempunyai rating
tegangannya sendiri-sendiri.
Gambar 2.2 Konfigurasi pin IC Regulator 78xx
(Sumber: datasheet IC regulator 78xx)
IC seri 78xx adalah sebuah keluarga IC regulator tegangan linier yang
bernilai tetap. IC regulator 78xx mempunyai 3 buah kaki, yaitu kaki tegangan
masukan yang biasa sering disebut Vin, kaki ground (0V) dan yang ketiga adalah
kaki tegangan keluaran atau Vout, seperti pada Gambar 2.2. Keluarga 78xx adalah
pilihan utama bagi banyak sirkuit elektronika yang memerlukan catu daya
teregulasi karena mudah digunakan dan harganya relatif murah. Untuk spesifikasi
IC individual, xx digantikan dengan angka dua digit yang mengindikasikan
tegangan keluaran yang di desain, contohnya 7805 mempunyai keluaran 5 volt
dan 7812 memberikan 12 volt.
Piranti ini biasanya mendukung tegangan masukan dari 3 volt diatas
tegangan keluaran hingga kira-kira 36 volt, dan biasanya mempu pemberi arus
listrik hingga 1.5 Amper. IC 78xx ini mempunyai beberapa keunggulan
diantaranya :
a. Seri 78xx tidak memerlukan komponen tambahan untuk meregulasi tegangan,
membuatnya mudah digunakan, ekonomis dan hemat ruang.
b. Seri 78xx memiliki rangkaian pengaman terhadap pembebanan lebih, panas
tinggi dan hubung singkat, sehingga membuatnya hampir tidak dapat rusak.
Dalam keadaan tertentu, kemampuan pembatasan arus peranti 78xx tidak
hanya melindunginya sendiri, tetapi juga melindungi rangkaian yang
12
Pada penelitian ini digunakan dua jenis IC regulator, yakni IC regulator
7805 dan 7809. Regulator 7805 & 7809 memerlukan tegangan positif dengan tiga
terminal masing-masing terminal input, terminal output dan terminal ground.
Tegangan yang akan diregulasi diberikan pada terminal input dan ground (Anwar
dkk. 2010).
2.3.3 LCD (Liquid Crystal Display)
LCD Display Module M1632buatan Seiko Instrument Inc. yaitu terdiri dari
dua bagian, yang pertama merupakan panel LCD sebagai media penampil
informasi dalam bentuk huruf/angka, yang dapat menampung 16 huruf/angka di
setiap baris. Bagian kedua merupakan sistem pengontrol panel LCD, yang
berfungsi mengatur tampilan informasi serta berfungsi mengatur komunikasi
M1632 dengan mikrokontroler yang memakai tampilan LCD. Dengan demikian
pemakaian LCD modul M1632 menjadi lebih sederhana. Untuk gambar LCD
dapat dilihat pada Gambar 2.3 berikut ini.
Gambar 2.3 LCD modul seiko M1632
(Sumber: Ardika, 2013)
Agar LCD dapat berhubungan dengan mikrokontroler, M1632 sudah
dilengkapi dengan 8 jalur data (DB0...DB7) yang dipakai untuk menyalurkan
kode ASCII maupun perintah pengatur kerjanya M1632. Selain itu dilengkapi pula
dengan E, R/W dan RS seperti layaknya komponen yang kompatibel dengan
mikroprosesor. Kombinasi sinyal E dan R/W merupakan sinyal standard pada
komponen buatan motorolla. Sebaliknya sinyal-sinyal dari mikrontroler
13
RS singkatan dari Register Select, yang dipakai untuk membedakan jenis
data yang dikirim ke M1632, jika RS=0 maka data yang dikirim adalah perintah
untuk mengatur kerja M1632, sebaliknya jika RS=1 maka data yang dikirim
adalah kode ASCII yang ditampilkan (Ardika, 2013).
2.3.4 Sensor Jarak SRF04
Pada penelitian ini, digunakan sensor ultrasonic dengan tipe SRF04 sebagai
pendeteksi obyek dari sisi robot mobil. SRF04 adalah sensor non-kontak
pengukur jarak menggunakan ultrasonik. Prinsip kerja sensor ini adalah
transmitter mengirimkan seberkas gelombang ultrasonik, lalu diukur waktu yang
dibutuhkan hingga datangnya pantulan dari obyek. Lamanya waktu ini sebanding
dengan dua kali jarak sensor dengan obyek, sehingga jarak sensor dengan obyek
dapat ditentukan persamaan 2.1 sebagai berikut:
Jarak= Kecepatan suara x Waktu pantul
2 (2.1)
SRF04 mempunyai catu daya input sebesar 5VDC dengan arus maksimal 50
mA, jarak jangkauan mulai dari 3 cm sampai dengan 300 cm, dan frekuensi suara
yang dipergunakan adalah 40 kHz. Gambar 2.4 dibawah ini merupakan bentuk
fisik daripada sensor SRF04.
Gambar 2.4 Sensor SRF04
(Sumber: datasheet SRF04)
Sensor ini hanya memerlukan 2 pin I/O untuk berkomunikasi dengan
mikrokontroler, yaitu TRIGGER dan ECHO. Untuk mengaktifkan SRF04
mikrokontroler mengirimkan pulsa positif melalui pin TRIGGER minimal 10 μs,
14
μs hingga 18 ms, yang sebanding dengan jarak obyek. Dibandingkan dengan sensor ultrasonik lain, seperti PING, SRF04 mempunyai kemampuan yang setara,
yaitu rentang pengukuran antara 3 cm – 3 m, dan output yang sama, yaitu panjang
pulsa. Meski cara pengoperasiannya juga mirip, namun kedua sensor tersebut
berbeda jumlah pin I/O-nya, yaitu 2 untuk SRF04 dan 1 untuk PING (Yusuf,
2009).
2.3.5 Sensor Garis Photodioda
Sensor garis adalah jenis sensor yang yang berfungsi untuk mendeteksi
warna garis hitam atau putih. Sensor ini penting karena sebagai penentu arah dan
gerakan robot. Sensor pendeteksi garis yang digunakan dalam robot mobil ini
adalah berdasarkan pada prinsip pemantulan cahaya dari LED dan photodioda
sebagai penerima cahaya. Photodioda merupakan piranti semikonduktor dengan
struktur sambungan p-n yang dirancang untuk beroperasi bila dibiaskan dalam
keadaan terbalik, untuk mendeteksi cahaya. Ketika energi cahaya dengan panjang
gelombang yang benar jatuh pada sambungan photodioda, arus mengalir dalam
sirkuit eksternal. Komponen ini kemudian akan bekerja sebagai generator arus,
yang arusnya sebanding dengan intensitas cahaya itu.
Cahaya diserap di daerah penyambungan atau daerah intrinsik menimbulkan
pasangan elektron-hole yang mengalami perubahan karakteristik elektris ketika
energi cahaya melepaskan pembawa muatan dalam bahan itu, sehingga
menyebabkan berubahnya konduktivitas. Hal inilah yang menyebabkan
photodioda dapat menghasilkan tegangan/arus listrik jika terkena cahaya
(Pandiangan, 2007).
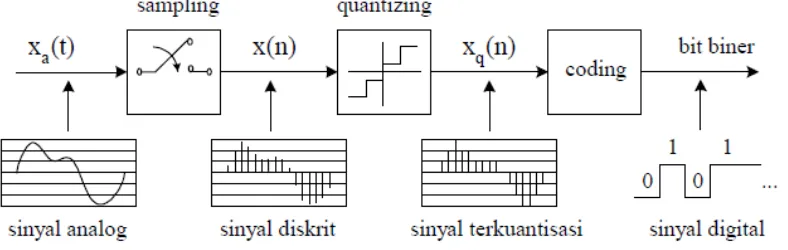
Sebuah ADC (Analog to Digital Converter) berfungsi untuk mengkodekan
tegangan sinyal analog waktu kontinu ke bentuk sederetan bit digital waktu diskrit
15
Proses konversi tersebut dapat digambarkan sebagai proses 3 langkah
seperti diilustrasikan pada Gambar 2.5.
Gambar 2.5 Proses Konversi Analog to Digital
(Sumber: anonim, 2016)
Sampling atau pencuplikan merupakan konversi suatu sinyal analog
waktu-kontinu, xa(t), menjadi sinyal waktu-diskrit bernilai kontinu, x(n), yang diperoleh
dengan mengambil “cuplikan” sinyal waktu kontinu pada saat waktu diskrit.
Kuantisasi merupakan konversi sinyal waktu-diskrit bernilai-kontinu, x(n),
menjadi sinyal waktu-diskrit bernilai-diskrit, xq(n). Nilai setiap waktu kontinu
dikuantisasi atau dinilai dengan tegangan pembanding yang terdekat. Selisih
antara cuplikan x(n) dan sinyal terkuantisasi xq(n) dinamakan error kuantisasi.
Coding atau pengkodean adalah setiap level tegangan pembanding
dikodekan ke dalam barisan bit biner. Untuk N = 3 bit, maka level tegangan
pembanding = 8 tingkatan. Kedelapan tingkatan tersebut dikodekan sebagai bit-bit
000, 001, 010, 011, 100, 101, 110, dan 111.
2.3.6 Bluetooth HC-05
Bluetooth adalah sebuah teknologi komunikasi nirkabel (tanpa kabel) yang
beroperasi dalam pita frekuensi 2,4 GHz unlicensed ISM (Industrial, Scientific
and Medical) dengan menggunakan sebuah frequency hopping transceiver yang
mampu menyediakan layanan komunikasi data dan suara secara real-time antara
host-host bluetooth dengan jarak jangkauan layanan yang terbatas (Sukamto,
2011). Pada penelitian robot mobil ini, digunakan modul bluetooth HC-05 sebagai
HC-16
05 merupakan salah satu modul bluetooth yang dapat ditemukan di pasaran
dengan harga yang relatif murah. Modul bluetooth HC-05 terdiri dari 6 pin
konektor, yang setiap pin konektor memiliki fungsi yang berbeda-beda. Gambar
modul Bluetooth HC-05 dapat dilihat pada Gambar 2.6 dibawah ini.
Gambar 2.6 Modul Bluetooth HC-05
(Sumber: datasheet HC-05)
Modul bluetooth HC-05 merupakan modul bluetooth yang bisa menjadi
slave ataupun master, hal ini dibuktikan dengan kemampuannya yang
memberikan notifikasi untuk melakukan pairing ke perangkat lain, maupun
notifikasi saat perangkat lain tersebut melakukan pairing ke modul bluetooth
HC-05. Untuk mengeset perangkat bluetooth dibutuhkan perintah-perintah AT
Command, yang mana perintah AT Command tersebut akan direspon oleh
perangkat bluetooth jika modul bluetooth tidak dalam keadaan terkoneksi dengan
perangkat lain. Gambar 2.7 dibawah ini merupakan pin konfigurasi dari bluetooth
HC-05.
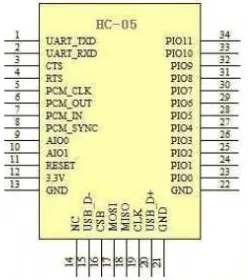
Gambar 2.7 Pin out Modul Bluetooth HC-05
17
Modul Bluetooth HC-05 terdiri dari 34 pin konektor, yang setiap pin
konektor memiliki fungsi yang berbeda-beda, namun pada penelitian ini hanya
dipergunakan 8 pin konektor saja, yakni:
1. Pin 1 UART_TX digunakan sebagai TXD (USART Output Pin)
2. Pin 2 UART_RX digunakan sebagai RXD (USART Input Pin)
3. Pin 13,21,22 digunakan sebagai vss atau gnd.
4. Pin 12 digunakan sebagai supply 3.3V dan merupakan pin yang berfungsi
sebagai masukan catu daya.
5. Pin 11 RESET merupakan pin yang digunakan untuk me-reset bluetooth.
6. Pin 34 digunakan sebagai key untuk masuk ke dalam perintah AT command
untuk perangkat HC-05.
2.3.7 Modul Driver H-Bridge
Bridge berfungsi untuk mengatur arah putaran motor DC. Jembatan
H-Bridge terdiri dari empat saklar yang terhubung secara topologi membentuk huruf
H dan terminal motor yang terletak pada garis horizontal huruf H. IC L293D
adalah IC yang di desain khusus sebagai driver motor DC dan dapat dikendalikan
dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan
driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan
positif karena di dalam driver L293D sistem driver yang digunakan adalah totem
pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang
berdiri sendiri-sendiri dengan kemampuan mengalirkan arus 1 Amper tiap driver.
Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor
DC. Modul driver H-Bridge ini dapat men-driver arus kontinyu sampai maksimal
4 Amper dan tegangannya dari 5.5 VDC s/d 36 VDC. Fungsi Pin Driver Motor
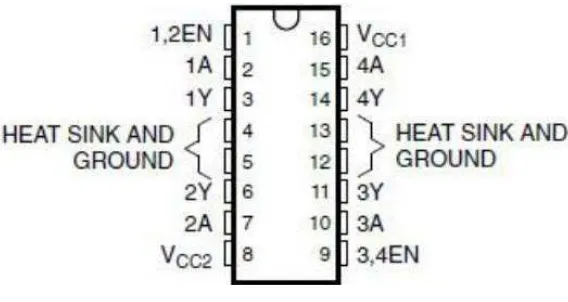
DC IC L293D adalah sebagai berikut:
1. Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima
perintah untuk menggerakan motor DC.
2. Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC.
3. Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver
18
4. Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC,
dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol driver dan
VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
5. Pin GND (Ground) adalah jalur yang harus dihubungkan ke ground, pin GND
ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin
kecil.
Konstruksi pin driver motor DC IC L293D dapat dilihat pada Gambar 2.8
sebagai berikut.
Gambar 2.8 Pin Konfigurasi IC L293D
(Sumber: anonim, 2016)
Tabel 2.4 dibawah ini merupakan interface pin header dari driver H-Bridge.
Tabel 2.4 Interface Pin Header Modul driver H-Bridge (Sumber: datasheet H-Bridge)
No Pin Header Modul
driver H-Bridge
Mikrokontroler ATmega32
Out driver Modul driver
H-Bridge
Untuk menentukan arah putaran motor DC ditentukan melalui input yang
diberikan. Apabila MIN1 diberi data high dan MIN2 diberi data low maka motor
akan berputar ke kiri, sedangkan jika MIN1 diberi data low dan MIN2 diberi data
19
untuk mengaktifkan pin MIN1 dan MIN2, sedangkan Enable B berfungsi untuk
mengaktifkan pin MIN3 dan MIN4 .
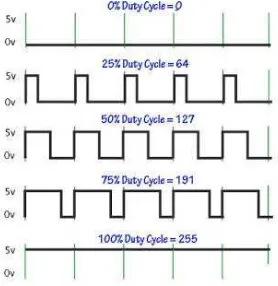
2.3.7.1 Pulse Width Modulation (PWM)
PWM atau Pulse Width Modulation adalah salah satu jenis modulasi.
Modulasi pada PWM dilakukan dengan cara merubah lebar pulsa dari suatu pulsa
data. Total 1 periode (T) pulsa dalam PWM adalah tetap, dan data PWM pada
umumnya menggunakan perbandingan pulsa positif (Ton) terhadap total pulsa.
Dengan kata lain, sinyal PWM mempunyai gelombang frekuensi yang tetap
namun Duty-Cycle yang bervariasi antara 0%-100%. Gambar 2.9 merupakan
grafik duty-cycle dari PWM.
Gambar 2.9 Sinyal PWM
(Sumber: Pancev, 2014)
2.4 Komponen Penggerak 2.4.1 Motor DC
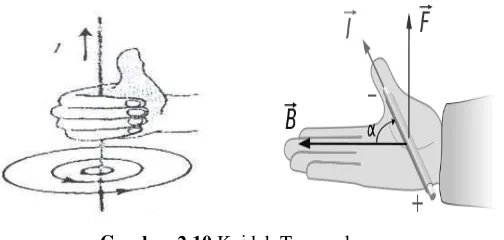
Motor DC adalah suatu motor penggerak yang dikemudikan dengan arus
searah (DC). Apabila kumparan jangkar dari mesin arus searah dialiri arus dan
kumparan medan diberi penguatan, maka akan timbul gaya lorentz pada setiap sisi
kumparan jangkar. Arah medan magnet dapat ditentukan dengan kaidah tangan
kanan dengan ibu jari menunjukan arah gaya putar dari arus lisrik yang mengalir
dalam sebuah kumparan jangkar yang berada dalam medan magnet, jari tengah
menunjukan arah arus listrik yang mengalir pada konduktor, dan jari telunjuk
20
Gambar 2.10 merupakan kaidah tangan kangan yang menunjukkan arah
medan magnet.
Gambar 2.10 Kaidah Tangan kanan
(Sumber: Ardika, 2013)
Dan Gambar 2.11 merupakan ilustrasi cara kerja dari motor DC.
Gambar 2.11 Cara Kerja Motor DC
(Sumber: Ardika, 2013)
Perputaran kumparan jangkar dalam medan magnet dan konduktor jangkar
yang dialiri arus menimbulkan kopel yang memotong medan magnet tersebut
sehingga pada konduktor jangkar akan timbul tegangan induksi (ggl) (Ardika,
2013).
2.5 Basic Compiler (BASCOM)
Bahasa pemprograman BASIC dikenal di seluruh dunia sebagai bahasa
pemrograman handal, cepat, mudah dan tergolong kedalam bahasa pemprograman
tingkat tinggi. Bahasa BASIC adalah salah satu bahasa pemprograman yang
21
kompatibel terhadap mikrokontroler jenis AVR dan didukung oleh compiler
software berupa BASCOM-AVR.
Setiap bahasa pemprograman mempunyai standar penulisan program.
Konstruksi dari program bahasa BASIC harus mengikuti aturan sebagai berikut:
$regfile = “header”
Dimana $regfile = “m16def.dat” merupakan pengarah preprosesor bahasa
BASIC yang memerintahkan untuk meyisipkan file lain, dalam hal ini
adalah file m16def.dat yang berisi deklarasi register dari mikrokonroler
ATmega32, pengarah preprosesor lainnya yang sering digunakan ialah sebagai
berikut:
$crystal = 12000000 ‘menggunakan crystal clock 12 MHz
$baud = 9600 ‘komunikasi serial dengan baudrate
9600
BASCOM memberikan kemudahan dalam hal komunikasi secara serial,
sehingga tidak perlu mengkonfigurasi register secara langsung. Hanya ada dua hal
yang harus dikonfigurasikan ketika menggunakan komunikasi serial dengan
BASCOM, yaitu kristal dan baud rate yang digunakan. Ada dua cara
mengkonfigurasikan komunikasi serial di dalam BASCOM, yaitu:
1. Mengatur menu Communication dengan cara masuk ke
Options>Compiler>Communication, kemudian mengisi kolom baud rate serta
kristal yang digunakan.
2. Mendeklarasikan baud rate dan kristal menggunakan Compiler Directive,
seperti berikut:
$baud = 9600
$crystal = 11059200
2.5.1 Tipe Data, Konstanta, dan Variabel
Tipe data merupakan bagian program yang paling penting karena sangat
22
menjadi lebih efisien dan efektif. Tabel 2.5 dibawah ini merupakan tipe data pada
BASCOM AVR.
Tabel 2.5 Tipe Data pada BASCOM AVR (Sumber: Wahyudin, 2007)
Tipe Data Ukuran (byte) Range
Bit 1/8 -
Byte 1 0 – 255
Integer 2 -32,768 - + 32,767
Word 2 0 – 65535
Long 4 -21
Single 4
String Hingga 254 byte
Konstanta merupakan suatu nilai dengan tipe data tertentu yang tidak dapat
diubah-ubah selama proses program berlangsung. Konstanta harus didefinisikan
terlebih dahulu di awal program. Contoh, Kp=35, Ki=15, Kd=40. Deklarasi
konstanta dalam bahasa basic di deklarasikan langsung. Contohnya: S = “Hello
world” ‘Assign string.
Variabel adalah suatu pengenal (identifier) yang digunakan untuk mewakili
suatu nilai tertentu di dalam proses program yang dapat diubah-ubah sesuai
dengan kebutuhan. Nama dari variabel bebas sesuai dengan yang diinginkan,
namun hal yang terpenting adalah setiap variabel diharuskan:
1. Terdiri dari gabungan huruf dan angka dengan karakter pertama harus berupa
huruf, maksimal 32 karakter.
2. Tidak boleh mengandung spasi atau simbol-simbol khusus seperti: $, ?, %, #, !,
&, *, (, ), -, +, = dan lain sebagainya kecuali underscore.
3. Deklarasi, deklarasi sangat diperlukan bila akan menggunakan pengenal
(identifier) dalam suatu program.
Bentuk umum pendeklarasian suatu variabel adalah Dim nama_variabel AS
23
2.6 MIT App Inventor
App Inventor adalah sebuah tool untuk membuat aplikasi android yang
berbasis visual block programming. Visual block programming maksudnya adalah
dalam penggunaannya user akan melihat, menggunakan, menyusun dan
drag-drops “blok” yang merupakan simbol-simbol perintah dan fungsi event handler
tertentu dalam membuat aplikasi, dan secara sederhana bisa disebut tanpa
menuliskan kode program. Aplikasi App Inventor ini pada dasarnya adalah
aplikasi yang disediakan oleh google dan sekarang di-maintenance oleh
Massachusetts Institute of Technology (MIT). Aplikasi ini selesai dibuat pada 12
Juli 2010 dan dirilis untuk publik pada 31 Desember 2011. App Inventor sekarang
dipegang oleh MIT Centre for Mobile Learning dengan nama MIT App Inventor.
Dengan menggunakan App Inventor ini, ada beberapa aplikasi yang dapat
dibuat diantaranya yaitu:
a. Aplikasi game
b. Aplikasi edukasi
c. Aplikasi berbasis tracking lokasi
d. Aplikasi SMS
e. Aplikasi berbasis web
f. Aplikasi kompleks (Mubarok, 2015)
Gambar 2.12 dibawah ini merupakan tampilan dari lembar kerja MIT App
Inventor.
24
Untuk menggunakan aplikasi App Inventor ini, ada beberapa
langkah-langkah yang perlu diperhatikan, yaitu masuk ke website