TUGAS AKHIR
ALAT UKUR NILAI RMS
( PENGUBAH TEGANGAN RMS MENJADI
TEGANGAN DC)
Diajukan untuk Memenuhi Salah Satu Syarat
Memperoleh Gelar Sarjana Teknik pada
Program Studi Teknik Elektro
Fakultas Teknik Universitas Sanata Dharma
disusun oleh
R.WICAKSONO WIJAYANTO
035114006
JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
FINAL PROJECT
Rms based AC Voltmeter
(Rms TO DC VOLTAGE converter)
Presented as Partial Fulfillment of the Requirements
to Obtain the SARJANA TEKNIK Degree
in Electrical Engineering
by:
R.WICAKSONO WIJAYANTO
Student Number: 035114006
ELECTRICAL ENGINEERING DEPARTMENT
ENGINEERING FACULTY
LEMBAR PERNYATAAN KEASLIAN KARYA
“Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini
tidak memuat karya atau bagian karya orang lain,
kecuali yang telah disebutkan dalam kutipan dan daftar pustaka,
sebagaimana layaknya karya ilmiah.”
Yogyakarta, 29 Januari 2007
HALAMAN PERSEMBAHAN DAN MOTTO
“Untuk segala sesuatu ada masanya, untuk apapun di bawah
langit ada waktunya. Ada waktu untuk lahir, ada waktu untuk
meninggal, ada waktu untk menanam, ada waktu untuk mencabut
yang ditanam; …… ada waktu untuk menangis, ada waktu untuk
tertawa; …… Ia membuat segala sesuatu indah pada
waktunya,………”
PENGKHOTBAH
3:1~11
Suka dan duka,
Dari sumber yang sama, yang mengalirkan tawa,
Betapa seringnya mengalirkan air mata.
Bahwa keduanya tak terpisahkan.
Bersama-sama keduanya datang, dan bila yang satu
Sendiri bertamu di meja makanmu
I ngatlah bahwa yang lain sedang ternyenyak di pemba-
ringanmu
KAHLI L
GI BRAN
Kupersembahkan karya tulis ini
kepada :
* Papa dan mamaku
INTISARI
Voltmeter yang sudah ada di Laboratorium Elektronika dan
Rangkaian Listrik Jurusan Teknik Elektro, Universitas Sanata Dharma
menghasilkan tingkat kesalahan yang lebih besar, apabila digunakan untuk
mengukur tegangan rms dari tegangan AC yang berbentuk pulsa kotak dan
segitiga. Voltmeter ini hanya akurat untuk mengukur tegangan rms dari
tegangan AC yang berbentuk sinusoidal. Tegangan rms diperlukan untuk
menentukan keakuratan penghantaran suatu alat.
Voltmeter nilai rms AC merupakan sebuah alat yang dirancang
untuk mengukur tegangan rms dari tegangan AC yang berbentuk sinusoidal,
pulsa kotak, dan segitiga. Untuk dapat mengukur tegangan rms, langkah
pertama adalah mengambil 256 cuplikan data tegangan dengan kecepatan
pengambilan data yang konstan. Selanjutnya, data diolah oleh mikrokontroler.
Mikrokontroler mengkuadratkan 256 cuplikan data tegangan, mencari rerata
dari kuadrat 256 cuplikan data tegangan, dan mikrokontroler mencari nilai
akarnya. Proses ini dilakukan sebanyak 16 kali dan mikrokontroler mencari
nilai reratanya. Nilai rerata dari 16 nilai tegangan rms tersebut dikirimkan
menuju DAC dan juga ditampilkan pada LCD. Alat ukur ini dapat
direalisasikan menggunakan rangkaian penguat pembalik, penyearah presisi,
ADC, DAC, mikrokontroler, dan LCD.
Dari hasil pengujian dan analisa, alat ini dapat menghasilkan
pengukuran nilai rms dengan tingkat kesalahan kurang dari 2,5% untuk
masukan tegangan AC pada skala 0,5Volt, pengukuran nilai rms dengan
tingkat kesalahan kurang dari 2,5% untuk masukan tegangan AC pada skala
5Volt, pengukuran nilai rms dengan tingkat kesalahan kurang dari 2% untuk
masukan tegangan AC pada skala 50Volt, pengukuran nilai rms dengan
tingkat kesalahan 1% untuk masukan tegangan AC pada skala 500Volt. Untuk
pengukuran terbaik, disarankan agar alat ini digunakan pada jangkauan
masukan dari 0,04Vp sampai 500Vp dan jangkauan frekuensi dari 10Hz
sampai 1000Hz. Pengukuran di luar jangkauan di atas dapat menghasilkan
tingkat kesalahan yang lebih besar.
ABSTRACT
Existing voltmeters in Electronic and Electric Circuit Laboratory
Electrical Engineering Department, Sanata Dharma University usually gives
more error when it is used to measure pulse and triangle AC rms voltage. This
voltmeters only accurate when it is needed to measure sinusoidal AC rms
voltage. Rms voltage need to be measured accurately to determine the
conduction in a device.
AC voltmeter true rms is an instrument that is designed to measure
rms voltage from sinusoidal, pulse, and triangle AC voltage. The first step in
measuring rms voltage is taking 256 voltage data samples with constant
sampling rate. Afterwards, data are processed by microcontroller.
Microcontroller then squaring the 256 voltage data sample, find the mean of
256 voltage data samples square, and then microcontroller find the root of
them. This process repeated 16 times and then microcontroller find the mean
of them. The mean of 16 rms voltage value is sent to DAC and displayed in
LCD. The realization of this instrument can be done using inverting
amplifiers, precision amplifiers, ADC, DAC, microcontroller, and LCD.
This instrument can measure rms voltage with less than 2.5% error
for AC voltage input in scale of 0.5 Volt, less than 2.5% AC voltage input in
scale of 5 Volt, less than 2% error for AC voltage input in scale of 50 Volt,
and less than 1% error for AC voltage input in scale of 500 Volt. For the best
result, it is recommended to use this instrument for range from 0.04 Vp input
to 500 Vp input, and frequency range from 10 Hz to 1000 Hz. Measurement
out of range above may give more error.
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Tuhan Yang Maha Esa atas
berkat dan rahmat-Nya sehingga penulis dapat menyelesaikan karya tulis
berjudul “
Rms based AC Voltmeter
”.
Karya tulis ini merupakan salah satu syarat untuk memperoleh gelar
Sarjana Teknik pada Program Studi Teknik Elektro Universitas Sanata
Dharma. Penulisan skripsi ini didasarkan pada hasil-hasil yang penulis
dapatkan selama tahap perancangan, pembuatan dan pengujian alat.
Penulisan skripsi ini tidak terlepas dari bantuan berbagai pihak. Untuk
itu, penulis mengucapkan terima kasih kepada:
1.
Kedua orang tua penulis yang telah memberikan semangat dan doa
yang tak pernah putus sehingga penulis dapat menyelesaikan tugas
akhir ini.
2.
Bapak Martanto, S.T., M.T., selaku dosen pembimbing I karya tulis
yang telah meluangkan waktu, tenaga, dan pikirannya untuk
membimbing penulis.
3.
Bapak Ir. Tjendro, selaku dosen pembimbing II karya tulis yang telah
meluangkan waktu, tenaga, dan pikirannya untuk membimbing
4.
Bapak Ir. Bayu Primawan, M. Eng selaku Ketua Jurusan Teknik
Elektro Universitas Sanata Dharma Yogyakarta.
5.
Romo Ir. Greg. Heliarko SJ.,SS.,BST.,MA.,MSC Selaku Dekan
Fakultas Teknik Universitas Sanata Dharma Yogyakarta.
6.
Rekan-rekan yang telah membantu penulis dalam pengerjaan karya
tulis ini: Iin TI’01, David TE’02, Rony TE’03 (
downloader
μ
C), Didit
TE’03 (matematis), Uci TE’03 (LCD M1632), Denis TE’03 (
scanner
),
Gigih (
Software
), Boy TE’03 (dasi), Dian TE’03 (
printer
), Adi TE’02
(surat-surat), Guntur TE’03 (
printer
), Anggi TE’05.
7.
Segenap dosen dan laboran Teknik Elektro Universitas Sanata
Dharma.
8.
Segenap karyawan sekretariat Fakultas Teknik.
9.
Teman-teman mahasiswa jurusan Teknik Elektro dan semua pihak
yang tidak dapat disebutkan satu persatu atas setiap bantuannya.
Penulis menyadari bahwa masih banyak kelemahan dan kekurangan dari
penulisan karya tulis ini. Oleh karena itu segala kritik dan saran yang bersifat
Akhir kata, semoga skripsi ini berguna bagi semua pihak dan dapat
menjadi bahan kajian lebih lanjut.
Yogyakarta,
29
Januari
2007
DAFTAR ISI
HALAMAN JUDUL
... i
HALAMAN JUDUL DALAM BAHASA INGGIS
... ... ii
HALAMAN PENGESAHAN OLEH PEMBIMBING
... iii
HALAMAN PENGESAHAN OLEH PENGUJI
... iv
PERNYATAAN KEASLIAN KARYA
... v
PERSEMBAHAN DAN MOTTO
... vi
INTISARI
... vii
ABSTRACT
... viii
KATA PENGANTAR
... ix
DAFTAR ISI
... xii
DAFTAR GAMBAR...
xvi
DAFTAR LAMPIRAN...
xxi
BAB I. PENDAHULUAN
... 1
1.1
Latar Belakang ... 1
1.2
Tujuan dan Manfaat ... 2
1.3
Batasan Masalah ... 2
1.4
Metodologi Penelitian ... 3
BAB II. DASAR TEORI
... 5
2.1 Nilai Rms ... 5
2.1.1 Nilai Rms dari Gelombang Sinusoidal... 6
2.1.2 Nilai Rms dari Gelombang Pulsa Kotak... 7
2.1.3 Nilai Rms dari Gelombang Segitiga... 8
2.2 Pencuplikan ... 9
2.3 Penguat Operasional... 11
2.3.1 Penguat Operasional sebagai Penguat
Inverting
... 11
2.3.2 Penguat Operasional sebagai Penyearah Presisi Gelombang
Penuh... 12
2.3.3 Penguat Operasional sebagai Pengubah Arus Menjadi
Tegangan ... 13
2.4
Pengubahan Analog ke Digital ... 14
2.5
Pengubahan Digital ke Analog ... 17
2.6
Transistor sebagai Saklar... 19
2.7 LCD
HD44780 ...
21
2.7.1 DDRAM...
22
2.7.2 CGRAM ...
22
2.7.3 CGROM ...
23
BAB III. PERANCANGAN RANGKAIAN
... 24
3.2 Perancangan
Perangkat
Keras ...
26
3.2.1
Rangkaian
Penguat
Inverting
dengan
Gain
dan Saklar
Rotary
.. 26
3.2.2 Rangkaian Penyearah Presisi... 29
3.2.3 Hubungan Sinyal Terkokndisi dengan AC0804... 31
3.2.4 Antarmuka ADC0804 degnan MIkrokontroler AT89s51 ... 32
3.2.5 Antarmuka Mikrokontroler AT89s51 dengan DAC0808 ... 33
3.2.6 Antarmuka Mikrokontroler AT89s51 dengan HD44780 ... 35
3.2.7 Indikator Berdasarkan Saklar
Rotary
... 36
3.3
Perancangan Perangkat Lunak ... 39
3.3.1 Kerangka Utama Program ... 39
3.3.2
Inisialisasi
LCD...
40
3.3.3 Ambil Nilai Tegangan, Kuadratkan, dan Jumlahkan ... 43
3.3.4 Cari Rerata dan Akar... 45
3.3.5 Keluaran dan Tampilan ... 50
3.3.6
Subrutin
Tunda ...
52
BAB IV. HASIL DAN PEMBAHASAN ...
54
4.1 Skala
0,5Volt...
55
4.2 Skala
5Volt...
65
4.3 Skala
50Volt...
75
4.4 Skala
500Volt...
86
5.1 Kesimpulan ...
90
5.2 Saran...
91
DAFTAR PUSTAKA
DAFTAR GAMBAR
1. Gambar 2-1 Gelombang Sinusoidal ...
6
2. Gambar 2-2 Pulsa Kotak ...
7
3. Gambar 2-3 Gelombang Segitiga...
8
4. Gambar 2-4 Sinyal analog
x(t)
... 10
5. Gambar 2-5 Deretan pulsa
x
p(t)
... 10
6. Gambar 2-6 Hasil pencuplikan
x
s(t)
... 11
7. Gambar 2-7 Rangkaian penguat operasional sebagai penguat
inverting
... 12
8. Gambar 2-8 Penyearah presisi gelombang penuh...
13
9. Gambar 2-9 Pegubah arus menjadi tegangan...
13
10. Gambar 2-10 Diagram blok pengubah analog ke digital ...
14
11. Gambar 2-11 Pin ADC0804...
17
12. Gambar 2-12 Pin DAC0808...
18
13. Gambar 2-13 Rangkaian transistor sebagai saklar ...
19
14. Gambar 2-14 Pin LCD HD44780 ...
21
15. Gambar 2-15 Hubungan posisi tampilan dan alamat DDRAM ...
22
14. Gambar 3-1 Diagram blok rancangan ...
24
15. Gambar 3-2 Rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
... 29
18. Gambar 3-5 Antarmuka AT89s51 dengan ADC0804...
32
19.Gambar 3-6 Antarmuka Mikrokontroler AT89s51 dengan
DAC0808 ... 34
20. Gambar 3-7 Antarmuka AT89s51 dengan HD44780 ...
35
21. Gambar 3-8 Rangkaian transistor sebagai saklar aktif rendah...
36
22.
Gambar 3-9 Antarmuka rangkaian indikator dengan
Mikrokontroler AT89s51 ...
38
23. Gambar 3-10 Diagram alir kerangka utama program ...
40
24. Gambar 3-11 Diagram alir subrutin inisialisasi LCD ...
41
25. Gambar 3-12 Diagram alir subrutin kirim perintah ...
42
26. Gambar 3-13 Diagram alir subrutin ambil nilai tegangan,
kuadratkan, dan jumlahkan ...
44
27. Gambar 3-14 Diagram alir subrutin cari reratadan akar ...
46
28. Gambar 3-15 Diagram alir subrutin keluaran dan tampilan...
50
29. Gambar 3-16 Diagram alir subrutin kirim data...
51
30.Gambar 4-1 Grafik kesalahan pengukuran gelombang sinusoidal
pada skala 0,5Volt untuk variasi frekuensi dengan amplitudo
tegangan tetap (%) ...
56
32.Gambar 4-3 Grafik kesalahan pengukuran gelombang segitiga
pada skala 0,5Volt untuk variasi frekuensi dengan amplitudo
tegangan tetap (%) ...
57
33.Gambar 4-4 Grafik kesalahan pengukuran gelombang segitiga
pada skala 0,5Volt untuk variasi amplitudo dengan frekuensi
tetap (%) ...
58
34.Gambar 4-5 Grafik kesalahan pengukuran gelombang pulsa kotak
pada skala 0,5Volt untuk variasi frekuensi dengan amplitudo
tegangan tetap (%) ...
58
35.Gambar 4-6 Grafik kesalahan pengukuran gelombang pulsa kotak
pada skala 0,5Volt untuk variasi amplitudo dengan frekuensi
tetap (%) ...
59
36.Gambar 4-7 Gelombang tegangan masukan pada skala 0,5Volt ...
63
38.Gambar 4-8 Gelombang keluaran rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
pada skala 0,5Volt...
63
39.Gambar 4-9 Gelombang keluaran rangkaian penyearah presisi
pada skala 0,5Volt...
64
40.Gambar 4-10 Grafik kesalahan pengukuran gelombang sinusoidal
pada skala 5Volt untuk variasi frekuensi dengan amplitudo
tegangan tetap (%) ...
66
41.Gambar 4-11 Grafik kesalahan pengukuran gelombang sinusoidal
pada skala 5Volt untuk variasi amplitudo dengan frekuensi tetap
42.Gambar 4-12 Grafik kesalahan pengukuran gelombang segitiga
pada skala 5Volt untuk variasi frekuensi dengan amplitudo
tegangan tetap (%) ...
67
43.Gambar 4-13 Grafik kesalahan pengukuran gelombang segitiga
pada skala 5Volt untuk variasi amplitudo dengan frekuensi tetap
(%)... 68
44.Gambar 4-14 Grafik kesalahan pengukuran gelombang pulsa
kotak pada skala 5Volt untuk variasi frekuensi dengan amplitudo
tegangan tetap (%) ...
68
45.Gambar 4-15 Grafik kesalahan pengukuran gelombang pulsa
kotak pada skala 5Volt untuk variasi amplitudo dengan frekuensi
tetap (%) ...
69
46.Gambar 4-16 Gelombang tegangan masukan pada skala 5Volt. ...
73
47.Gambar 4-17 Gelombang keluaran rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
pada skala 5Volt...
73
48.Gambar 4-18 Gelombang keluaran rangkaian penyearah presisi
pada skala 5Volt...
74
49.Gambar 4-19 Grafik kesalahan pengukuran gelombang sinusoidal
pada skala 50Volt untuk variasi frekuensi dengan amplitudo
tegangan tetap (%) ...
76
50.Gambar 4-20 Grafik kesalahan pengukuran gelombang sinusoidal
pada skala 50Volt untuk variasi amplitudo dengan frekuensi
51.Gambar 4-21 Grafik kesalahan pengukuran gelombang segitiga
pada skala 50Volt untuk variasi frekuensi dengan amplitudo
tegangan tetap (%) ...
77
52.Gambar 4-22 Grafik kesalahan pengukuran gelombang segitiga
pada skala 50Volt untuk variasi amplitudo dengan frekuensi
tetap (%) ...
78
53.Gambar 4-23 Grafik kesalahan pengukuran gelombang pulsa
kotak pada skala 50Volt untuk variasi frekuensi dengan
amplitudo tegangan tetap (%) ...
78
54.Gambar 4-24 Grafik kesalahan pengukuran gelombang pulsa
kotak pada skala 50Volt untuk variasi amplitudo dengan
frekuensi tetap (%) ...
79
55.Gambar 4-25 Gelombang tegangan masukan pada skala 50Volt ...
84
56.Gambar 4-26 Gelombang keluaran rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
pada skala 50Volt...
84
57.Gambar 4-27 Gelombang keluaran rangkian penyearah presisi
pada skala 50Volt...
85
58.Gambar 4-28 Gelombang keluaran rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
pada skala 500Volt...
86
59.Gambar 4-29 Gelombang keluaran rangkian penyearah presisi
DAFTAR LAMPIRAN
1. Gambar
Rangkaian...
L2
2. Perhitungan
Tegangan
Rms ...
L3
3. Pencuplikan Gelombang Sinusoidal Sebanyak 256 kali...
L6
4. Foto Perangkat Keras Hasil Perancangan ...
L10
5. Listing
Program...
L11
6. Tabel 1 Data pengukuran gelombang tegangan sinusoidal pada
skala 0,5Volt untuk variasi frekuensi dengan amplitudo
tetap... ... L27
7. Tabel 2 Data pengukuran gelombang tegangan sinusoidal pada
skala 0,5Volt untuk variasi amplitudo dengan frekuensi
tetap... ... L33
8. Tabel 3 Data pengukuran gelombang tegangan sinusoidal pada
skala 5Volt untuk variasi frekuensi dengan amplitudo
tetap... ... L39
9. Tabel 4 Data pengukuran gelombang tegangan sinusoidal pada
skala 5Volt untuk variasi amplitudo dengan frekuensi
tetap... ... L45
10. Tabel 5 Data pengukuran gelombang tegangan sinusoidal pada
skala 50Volt untuk variasi frekuensi dengan amplitudo
11. Tabel 6 Data pengukuran gelombang tegangan sinusoidal pada
skala 50Volt untuk variasi amplitudo dengan frekuensi
tetap... ... L54
12. Tabel 7 Data pengukuran gelombang tegangan segitiga pada
skala 0,5Volt untuk variasi frekuensi dengan amplitudo
tetap... ... L57
13. Tabel 8 Data pengukuran gelombang tegangan segitiga pada
skala 0,5Volt untuk variasi amplitudo dengan frekuensi
tetap... ... L63
14. Tabel 9 Data pengukuran gelombang tegangan segitiga pada
skala 5Volt untuk variasi frekuensi dengan amplitudo
tetap... ... L69
15. Tabel 10 Data pengukuran gelombang tegangan segitiga pada
skala 5Volt untuk variasi amplitudo dengan frekuensi
tetap... ... L75
16. Tabel 11 Data pengukuran gelombang tegangan segitiga pada
skala 50Volt untuk variasi frekuensi dengan amplitudo
tetap... ... L81
17. Tabel 12 Data pengukuran gelombang tegangan segitiga pada
skala 50Volt untuk variasi amplitudo dengan frekuensi
18. Tabel 13 Data pengukuran gelombang tegangan pulsa kotak pada
skala 0,5Volt untuk variasi frekuensi dengan amplitudo
tetap... ... L87
19. Tabel 14 Data pengukuran gelombang tegangan pulsa kotak pada
skala 0,5Volt untuk variasi amplitudo dengan frekuensi
tetap... ... L92
20. Tabel 15 Data pengukuran gelombang tegangan pulsa kotak pada
skala 5Volt untuk variasi frekuensi dengan amplitudo
tetap... ... L97
21. Tabel 16 Data pengukuran gelombang tegangan pulsa kotak pada
skala 5Volt untuk variasi amplitudo dengan frekuensi
tetap... ... L103
22. Tabel 17 Data pengukuran gelombang tegangan pulsa kotak pada
skala 50Volt untuk variasi frekuensi dengan amplitudo
tetap... ... L109
23. Tabel 18 Data pengukuran gelombang tegangan pulsa kotak pada
skala 50Volt untuk variasi amplitudo dengan frekuensi
tetap... ... L112
24.
Datasheet
ADC0804... ... L115
25.
Datasheet
DAC0808... ... L147
26.
Datasheet
LF351…... L155
27.
Datasheet
HD44780U... L160
29.
Datasheet
1N4148…... L177
30.
Datasheet
PSS9012... L179
BAB I
PENDAHULUAN
1.1
Latar Belakang Masalah
Dalam perkuliahan di Jurusan Teknik Elektro, Universitas Sanata
Dharma, mahasiswa sering melakukan pengukuran nilai rms (
root-mean-square
) dari tegangan AC dengan menggunakan voltmeter (baik voltmeter
analog maupun digital), misalnya untuk melakukan tugas kuliah atau
praktikum. Sebagian besar voltmeter yang ada di Laboratorium
Elektronika dan Rangkaian Listrik Jurusan Teknik Elektro, Universitas
Sanata Dharma hanya akurat jika digunakan untuk mengukur nilai rms
tegangan AC yang berbentuk sinusoidal. Oleh karena itu, lebih baik jika
laboratorium menyediakan voltmeter yang akurat untuk mengukur nilai
rms tegangan AC yang mempunyai bentuk selain sinusoidal, misalnya
mempunyai bentuk pulsa kotak, dan segitiga.
Pada penelitian ini, akan dirancang sebuah alat ukur nilai rms dari
tegangan AC yang berbentuk sinusoidal, pulsa kotak, dan segitiga dengan
menggunakan Mikrokontroler AT89s51 sebagai pengendali utama. Alat
dan menyediakan tegangan DC yang merupakan representasi dari nilai
rms masukan tegangan AC.
1.2
Tujuan dan Manfaat
Tujuan yang akan dicapai dalam perancangan ini adalah membuat
suatu peralatan sebagai aplikasi Mikrokontroler AT89s51 yang berfungsi
sebagai penampil nilai rms dari masukan tegangan AC dan juga penyedia
tegangan DC yang merepresentasikan nilai rms dari masukan tegangan
AC.
Manfaat yang akan dicapai adalah:
a.
Menambah literatur aplikasi mikrokontroler untuk instrumentasi, yaitu
alat ukur nilai rms dari masukan tegangan AC dan juga penyedia
tegangan DC yang merepresentasikan nilai rms dari masukan tegangan
AC.
b.
Memudahkan pengguna laboratorium untuk melakukan pengukuran
nilai rms dari masukan tegangan AC.
c.
Memberi hasil nilai rms yang akurat untuk masukan tegangan AC
yang mempunyai bentuk selain sinusoidal.
1.3
Batasan Masalah
Perangkat yang akan dirancang mempunyai batasan-batasan
sebagai berikut:
b.
Tegangan masukan dengan frekuensi masukan maksimum 1000Hz
dan frekuensi masukan minimum 40Hz.
c.
Tegangan masukan berbentuk sinusoidal, pulsa kotak, dan segitiga.
d.
Untuk tegangan masukan berbentuk pulsa maka lebar pulsa
minimumnya adalah 0,5mS.
e.
Tampilan alat menggunakan LCD.
f.
Mikrokontroler yang digunakan adalah Mikrokontroler AT89s51.
1.4
Metodologi Penelitian
Penulis melakukan penelitian dengan melakukan metodologi
sebagai berikut:
a.
Mengumpulkan referensi dan literatur dari perpustakaan dan internet.
b.
Menyusun referensi dan literatur yang ada.
c.
Perancangan dan pembuatan alat yang terencana meliputi perancangan
keras dan perangkat lunak.
d.
Penyusunan laporan.
1.5 Sistematika Penulisan
Sistematika penulisan dibagi menjadi beberapa bab, yaitu:
BAB I.
Berisi latar belakang penelitian, tujuan dan manfaat penelitian,
batasan masalah, metodologi penelitian, dan sistematika
BAB II. Berisi dasar teori meliputi nilai rms (
root-mean-square
),
penguat operasional, pengubahan analog menjadi digital
(ADC), pengubahan digital menjadi analog (DAC), transistor
sebagai saklar, LCD HD44780.
BAB III. Berisi perancangan alat yang meliputi diagram blok
perancangan, perancangan perangkat keras, dan perancangan
perangkat lunak.
BAB IV. Berisi data pengamatan dan pembahasan.
BAB II
DASAR TEORI
2.1
Nilai Rms (root-mean-square)
Nilai rms digunakan untuk mengukur efektifitas sebuah sumber
tegangan dalam memberikan daya pada sebuah beban dan menentukan
keakuratan penghantaran suatu alat dan tingkat tegangan suatu alat. Nilai
rms suatu gelombang dapat dihitung sebagai:
Vrms =
∫
T
dt
V
T
02
.
1
(2-1)
dengan
T
adalah perioda waktu dan
V
adalah tegangan dari gelombang.
Nilai rms gelombang tegangan yang berbentuk pulsa sinusoidal dan pulsa
kotak dapat dihitung juga dengan persamaan 2-1. Secara umum, nilai rms
merupakan akar dari kuadrat rata-rata suatu gelombang. Apabila
gelombang menjadi rusak sampai pada harmonisanya, nilai rms dapat
dihitung secara individual. Nilai rms dari gelombang, sesungguhnya dapat
didekati dengan kombinasi nilai rms setiap harmonisanya, seperti
ditunjukkan pada persamaan 2-2.
dengan
Vdc
adalah tegangan komponen DC,
Vrms
dan
Vrms
adalah
nilai rms dari frekuensi fundamental dan komponen harmonik ke-
n
, secara
individu.
) 1
( (n)
Pengukuran nilai rms berguna dalam perhitungan daya, seperti
dalam rumus berikut ini:
R
Vrms
P
2
=
(2-3)
dengan
P
adalah daya dan
R
adalah nilai resistor.
2.1.1 Nilai Rms dari Gelombang Sinusoidal
Nilai puncak (
peak
) gelombang tegangan yang berbentuk
sinusoidal merupakan nilai maksimum gelombang baik pada bagian
positif ataupun negatif. Nilai ini ditunjukkan oleh
V
p1dan -
V
p1pada
gambar 2-1.
Vs
T
1V
p10
t
-V
p1T
01Nilai puncak-ke-puncak (
peak-to-peak
) gelombang merupakan nilai dari
puncak positif ke puncak negatif dan dapat dihitung dengan
Vpp = 2 V
p1(2-4)
Nilai rms dari gelombang tegangan yang berbentuk sinusoidal adalah
Vrms =
2
1p
V
(2-5)
Untuk gelombang tegangan yang berbentuk setengah gelombang
sinusoidal, nilai rms yang dihasilkan dapat dihitung dengan
Vrms = V
p11 01
.
2
T
T
(2-6)
2.1.2
Nilai Rms dari Gelombang Pulsa Kotak
Nilai puncak (
peak
) gelombang tegangan yang berbentuk pulsa
kotak merupakan nilai maksimum gelombang pada bagian positif. Nilai
ini ditunjukkan oleh
V
p2pada gambar 2-2.
Vs
T
2V
p20
t
T
02Nilai rms dari gelombang tegangan yang berbentuk pulsa kotak adalah
Vrms = V
p22 02
T
T
(2-7)
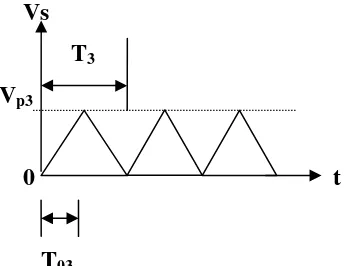
2.1.3
Nilai Rms dari Gelombang Segitiga
Nilai puncak (
peak
) gelombang tegangan yang berbentuk segitiga
merupakan nilai maksimum gelombang pada bagian positif. Nilai ini
ditunjukkan oleh
V
p3pada gambar 2-3.
Vs
T
3V
p30
t
T
03Gambar 2-3. Gelombang segitiga.
Nilai rms dari gelombang segitiga adalah
Vrms =
3
3 03 3 3 2 03 3 03
03 3
3
3
)
(
)
(
T
T
T
T
T
T
T
T
V
p−
+
−
−
(2-8)
Untuk nilai
T
3=
2 T
03maka nilai rms dari gelombang segitiga yang
Vrms
=
V
p33
1
(2-9)
2.2
Pencuplikan
Proses pencuplikan dapat dilakukan dengan berbagai cara. Cara
paling populer adalah dengan operasi
sample and hold
. Dalam operasi ini,
saklar dan mekanisme penyimpan bekerja untuk menghasilkan deretan
cuplikan dari sinyal masukan yang kontinyu. Hasil dari proses
pencuplikan disebut
Pulse Amplitude Modulation
(PAM) karena interval
keluaran yang berturutan dapat digambarkan sebagai deretan pulsa dengan
amplitudo tertentu sesuai dengan sinyal masukan. Sinyal analog yang
mendekati sinyal masukan bisa didapatkan kembali (direkonstruksi) dari
sinyal PAM dengan
low-pass filter
sederhana.
Sinyal dengan
band
terbatas, yaitu sinyal yang tidak mempunyai
komponen spektral diatas
f
mhertz. Sinyal dengan
band
terbatas dapat
ditentukan secara unik dengan nilai tercuplik pada interval
T
sdetik,
dengan
m s
f
T
2
1
≤
(2-10)
dan laju pencuplikan (
sampling rate
) adalah
s s
T
f
=
1
(2-11)
Dalam hal ini terdapat batasan untuk laju pencuplikan, dikenal sebagai
(2-12)
m
s
f
f
≥
2
sehingga laju pencuplikan sering juga disebut sebagai laju
Niquist
. Kriteria
ini merupakan syarat cukup supaya sinyal analog masukan bisa didapatkan
kembali seutuhnya dari sinyal diskret tercuplik.
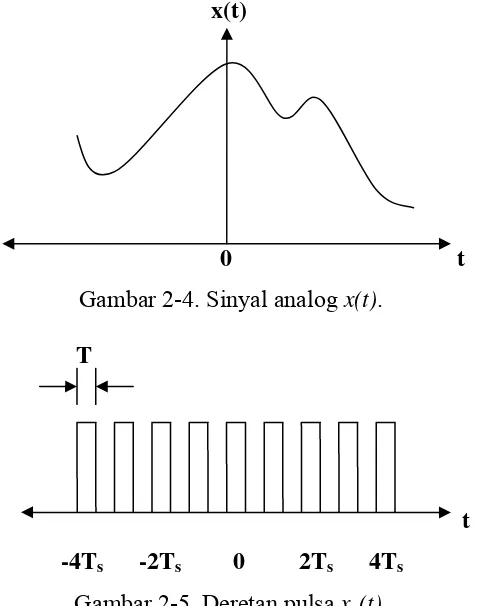
Pencuplikan yang ditinjau dari segi yang lebih praktis, sering
disebut dengan pencuplikan praktis. Gelombang pencuplik pada
pencuplikan praktis mempunyai amplitudo dan lebar pulsa yang
berhingga. Gelombang yang dicuplik merupakan isyarat terbatasi waktu.
Pencuplikan dilakukan dengan mengkalikan sinyal analog
x(t)
pada
gambar 2-4 dengan deretan pulsa
x
p(t)
pada gambar 2-5.
x(t)
0
t
Gambar 2-4. Sinyal analog
x(t)
.
T
t
-4T
s-2T
s0
2T
s4T
sSetiap pulsa mempunyai lebar
T
dan amplitudo 1
/ T
. Proses pengkalian
dapat diartikan sebagai proses pembukaan dan penutupan suatu saklar.
Deretan data hasil pencuplikan
x
s(t)
yang ditunjukkan pada gambar
2-6 dinyatakan sebagai
(2-13)
)
(
)
(
)
(
t
x
t
x
t
x
s=
pPencuplikan ini juga disebut pencuplikan natural karena puncak dari tiap
pulsa
x
s(t)
mempunyai bentuk yang sesuai dengan sinyal analog.
t
-4T
s-2T
s0
2T
s4T
sGambar 2-6. Hasil pencuplikan
x
s(t)
.
2.3
Penguat Operasional
2.3.1
Penguat Operasional Sebagai Penguat Inverting
Rangkaian penguat operasional sebagai penguat
inverting
terdiri atas
sebuah penguat operasional dan dua buah resistor. Rangkaian ini
menggunakan
feedback
supaya penguatan dari penguat operasional lebih
kecil dibandingkan dengan penguatan
large signal voltage gain
sebesar
penguat operasional sebagai penguat
inverting
ditunjukkan pada gambar
2-7.
Rf
1k
Vo
+
-Vi
Ri
Gambar 2-7. Rangkaian penguat operasional sebagai penguat
inverting.
Besarnya penguatan dapat dihitung dengan
Ri
Rf
pengua
tan
=
(2-14)
2.3.2
Penguat Operasional sebagai Penyearah Presisi Gelombang
Penuh
Rangkaian penguat operasional sebagai penyearah presisi
gelombang penuh terdiri atas dua buah penguat operasional. Penguat
operasional yang pertama berfungsi sebagai penyearah presisi setengah
gelombang
inverting
dan penguat operasional yang kedua berfungsi
sebagai penjumlah pembalik. Keuntungan menggunakan rangkaian ini
adalah tegangan keluaran yang tidak mengalami pengurangan tegangan
yang disebabkan oleh prasikap tegangan maju dioda, sehingga tegangan di
bawah prasikap tegangan maju dioda juga dapat disearahkan. Besarnya
penguatan dapat dihitung dengan
R
Rf
Rangkaian penguat operasional sebagai penyearah presisi gelombang
penuh ditunjukkan pada gambar 2-8.
D2
R
+
-D1
R
Rf R/2
R
+
-Vo Vi
Gambar 2-8. Penyearah presisi gelombang penuh.
2.3.3 Penguat Operasional Sebagai Pengubah Arus Menjadi
Tegangan
Rangkaian penguat operasional sebagai pengubah arus menjadi
tegangan menggunakan sebuah penguat operasional dan sebuah resistor.
I
R
+
-Vo
Gambar 2-9. Pengubah arus menjadi tegangan.
Masukan rangkaian ini berupa arus, arus tersebut akan melewati
ground
semu dan selanjutnya akan melewati resistor sehingga menimbulkan
(2-16)
R
I
Vo
=
−
×
Rangkaian penguat operasional sebagai pengubah arus menjadi tegangan
ditunjukkan pada gambar 2-9.
2.4
Pengubahan Analog ke Digital
Pengubah sinyal analog menjadi sinyal digital disebut penyandi
atau
encoder
. Gambar 2-10 memperlihatkan diagram blok pengubah
analog ke digital.
MSB LSB
Pengubah analog ke digital
D
C
B
A
Masukan analog
Gambar 2-10. Diagram blok pengubah analog ke digital.
Gambar 2-10 memperlihatkan masukan berupa sinyal analog yang diubah
menjadi bentuk biner pada bagian keluaran dari bit paling rendah (LSB)
sampai bit yang paling tinggi (MSB).
Pengubah analog ke digital yang digunakan oleh penulis adalah
ADC0804 yang dibuat untuk dapat langsung berhubungan dengan
mikroprosesor baik Zilog 80, 8080, atau mikroprosesor 8 bit lainnya.
Sinyal masukan maupun sinyal keluaran dari IC ini, sesuai untuk MOS
pengubahan masukan dan mengeluarkan dalam bentuk biner. Beroperasi
pada daya standar +5volt dan dapat menerima masukan analog berkisar
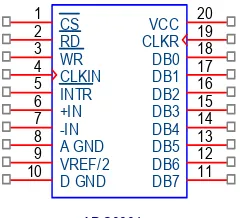
0Volt sampai 5Volt. Macam-macam pin (kaki) yang dimiliki oleh IC
ADC0804:
a.
CS
Berfungsi sebagai masukan. Pin ini sebagai chip
select
dari
kontrol mikroprosesor.
b.
RD
Berfungsi sebagai masukan. Pin ini sebagai kontrol untuk
membaca data dari mikroprosesor.
c.
WR
Berfungsi sebagai masukan. Pin ini sebagai kontrol untuk
menulis data ke mikroprosesor.
d.
CLK IN
Berfungsi sebagai masukan. Pin ini sebagai pengatur detak.
e.
INTR
Berfungsi sebagai keluaran. Pin ini sebagai sarana untuk
memberikan interupsi pada masukan interupsi mikroprosesor.
f.
V
IN(+)
Berfungsi sebagai masukan. Pin ini merupakan jalan masuk
g. V
IN(-)
Berfungsi sebagai masukan. Pin ini merupakan jalan masuk
bagi sinyal analog masukan negatif.
h.
A GND
Berfungsi sebagai masukan daya. Pin ini sebagai pembulatan
analog.
i.
V
REF/2
Berfungsi sebagai masukan. Pin ini merupakan jalan masuk
bagi tegangan acuan yang lain (±).
j.
D GND
Berfungsi sebagai keluaran. Pin ini sebagai pembulatan digital.
k.
DB7-DB0
Berfungsi sebagai keluaran. Pin ini merupakan jalan keluaran
bagi data keluaran bit7 sampai bit0.
l.
CLKR
Berfungsi sebagai masukan. Pin ini sebagai pengatur detak
dengan menghubungkannya ke resistor eksternal.
m.
V
CC(Or ref)
Berfungsi sebagai masukan daya. Pin ini sebagai jalan masuk
untuk catu daya +5volt dan tegangan acuan primer.
ADC0804
6 7
9
11 12 13 14 15 16 17 18 19
4 5 1 2 3
10 8
20
+IN -IN
VREF/2
DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 CLKR
CLKIN INTR CS RD WR
D GND A GND
VCC
Gambar 2-11. Pin ADC0804.
Resolusi ADC dengan jumlah bit (n) dapat dihitung dengan
1
2
−
=
V
nmakresolusi
Volt/step
(2-17)
2.5
Pengubahan Digital ke Analog
Pengubah digital ke analog sering disebut dengan
Digital to Analog
Converter
(DAC). Secara umum, DAC merupakan suatu penerjemah
informasi berbentuk digital ke dalam informasi berbentuk analog
ekuivalennya. Peralatan pengubah sinyal digital ke sinyal analog disebut
juga pengawasandi atau
decoder
. DAC yang digunakan oleh penulis
adalah IC DAC0808. IC DAC0808 ini mempunyai keluaran berupa arus,
sehingga perlu diubah terlebih dahulu agar menjadi tegangan. Keluaran
dari IC DAC0808 diumpankan sebagai masukan rangkaian pengubah arus
menjadi tegangan, sehingga keluarannya berupa gelombang
ramp
yang
akan meningkat amplitudonya jika hitungan pencacah biner semakin
ramp
dapat tersusun menjadi 255 langkah dengan skala maksimum sebesar
2mA. Tegangan keluaran rangkaian IC DAC0808 dan rangkaian pengubah
arus menjadi tegangan dapat dihitung dengan
⎥⎦
⎤
⎢⎣
⎡
+
+
+
+
+
+
+
+
=
256
8
128
7
64
6
32
5
16
4
8
3
4
2
2
1
)
(
A
A
A
A
A
A
A
A
Vref
Vo
(2-18)
Akurasi (ketelitian) adalah seberapa dekat nilai keluaran
sebenarnya dari pengubah digital ke analog terhadap nilai keluaran secara
teoritis. Semakin kecil prosentase ketelitian, maka semakin dekat dengan
nilai secara teoritis. Resolusi adalah pertambahan terkecil pada tegangan
yang dapat diamati. Pertambahan terkecil pada tegangan keluaran terutama
ditentukan oleh tegangan masukan bit terkecil atau LSB, karena resolusi
merupakan fungsi banyaknya bit dalam sinyal masukan digital. Gambar
2-12 menunjukkan konfigurasi kaki pada DAC0808.
DAC0808 6 7 9 10 11 12 13 14 15 4 5 1 2 3 8 16 A2 A3 A5 A6 A7 A8 VCC VREF(+) VREF(-) IO A1 NC GND VEE A4 CMPS
Gambar 2-12. Pin DAC0808.
Resolusi DAC dengan jumlah bit (n) dapat dihitung dengan
min
−
−
=
V
maknV
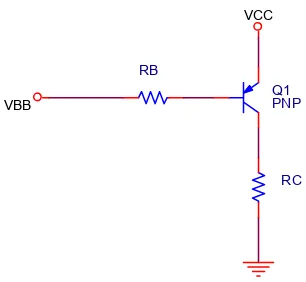
2.6
Transistor sebagai Saklar
Transistor mempunyai 2 keadaan ekstrim
yaitu daerah
cut off
(titik
sumbat) dan daerah jenuh (saturasi). Keadaan ekstrim menjadikan
transistor dapat digunakan sebagai
switch
atau saklar. Pada saat arus basis
Ib
= 0, transistor identik dengan saklar yang sedang
off
, karena transistor
hanya melewatkan arus kolektor
Ic
yang kecil, sehingga tegangan emitor
kolektor V
ECmendekati Vcc. Pada saat arus basis
Ib
cukup besar,
transistor identik dengan saklar yang sedang
on
, karena transistor
melewatkan arus kolektor
Ic
yang besar, sehingga tegangan emitor
kolektor V
ECkecil. Tegangan ini merupakan tegangan saturasi
emitor-kolektor (V
EC) yang besarnya antara 0,2Volt sampai 0,3Volt.
Rangkaian transistor sebagai saklar yang digunakan oleh penulis
ditunjukkan pada gambar 2-13.
)(Sat
VCC
RC RB
VBB
Q1 PNP
Arus kolektor saat saturasi
dapat dihitung dengan
Rc
V
Vcc
Ic
(Sat)=
−
EC(sat)Ampere (2-20)
Dengan demikian, nilai arus basis yang akan menimbulkan saturasi adalah
hfe
Ic
Ib
Sat Sat) ( )
(
=
Ampere
(2-21)
dengan
Ib
adalah arus basis pada saat penjenuhan,
Ic
adalah arus
kolektor pada saat penjenuhan, dan
hfe
adalah penguatan arus DC.
Tegangan emitor-kolektor pada saat penjenuhan adalah
)(Sat (Sat)
V
EC= V
EC(Sat)Volt
(2-22)
Daerah aktif dari transistor merupakan semua titik operasi di antara
daerah
cut off
dengan daerah saturasi. Di dalam daerah aktif, sambungan
emitor-basis diberi prasikap tegangan maju. Persamaan 2-23 digunakan
untuk menghitung arus basis dalam setiap rangkaian prasikap tegangan
basis. Pada daerah aktif, arus kolektor
Ic
dianggap tetap. Dengan nilai
Ib
tertentu,
Ic
tidak banyak berubah walaupun Vcc bertambah.
Rb
V
V
V
Ib
=
CC−
EB−
BBAmpere
(2-23)
dengan
Ib
adalah arus basis,
V
BBadalah tegangan basis,
V
EBadalah
2.7
LCD HD44780
HD44780 merupakan matriks LCD dengan konfigurasi 16 karakter
dan 2 baris. Setiap karakter dibentuk oleh 8x5 atau 10x5 pixel. Gambar
2-14 menunjukkan konfigurasi kaki pada LCD HD44780.
GND VCC VO RS RW E D0 D1 D2 D3 D4 D5 D6 D7 V61 V60
HD44780 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Gambar 2-14. Pin LCD HD44780.
Pin–pin pada LCD HD44780 adalah sebagai berikut:
•
Pin 1 (V
CC): tegangan +5Volt untuk catu LCD.
•
Pin 2 (GND): tegangan 0Volt (
ground
) modul LCD.
•
Pin 3 (V
EE/V
LCD): tegangan pengatur kontras LCD, maksimum pada
0Volt.
•
Pin 4 (RS):
Register Select
, pin pemilih
register
yang akan diakses.
1 = akses ke
register
data
0 = akses ke
register
perintah
•
Pin 5 (R/W): mode baca atau tulis LCD
0 = mode penulisan.
•
Pin 6 (E): pin untuk mengaktifkan
clock
LCD.
•
Pin 7-14 (D0-D7): jalur bus data.
•
Pin 15 (Anoda): tegangan positif
backlight
modul LCD sekitar 4,5Volt.
•
Pin 16 (Katoda): tegangan negatif
backlight
modul LCD sebesar 0Volt.
2.7.1 DDRAM (Display Data Random Access Memory)
DDRAM merupakan memori tempat karakter yang ditampilkan
berada. Contoh, untuk karakter ‘A’ atau 41H yang ditulis pada alamat 00h,
maka karakter tersebut akan tampil pada baris pertama dan kolom pertama
dari LCD. Apabila karakter tersebut ditulis di alamat 40h, maka karakter
tersebut akan tampil pada baris kedua kolom pertama dari LCD.
Hubungan posisi tampilan dan alamat DDRAM ditunjukkan gambar 2-15.
Gambar 2-15. Hubungan posisi tampilan dan alamat DDRAM.
2.7.2 CGRAM (Character Generator Random Access Memory)
CGRAM adalah memori untuk menggambarkan pola sebuah
memori ini akan hilang saat
power supply
tidak aktif, sehingga pola
karakter akan hilang.
2.7.3 CGROM (Character Generator Read Only Memory)
CGROM adalah memori untuk menggambarkan pola sebuah
karakter dan pola tersebut sudah ditentukan secara permanen dari
HD44780 sehingga pengguna tidak dapat mengubah lagi. Memori ini
bersifat permanen, sehingga pola karakter tidak akan hilang meski
power
BAB III
RANCANGAN PENELITIAN
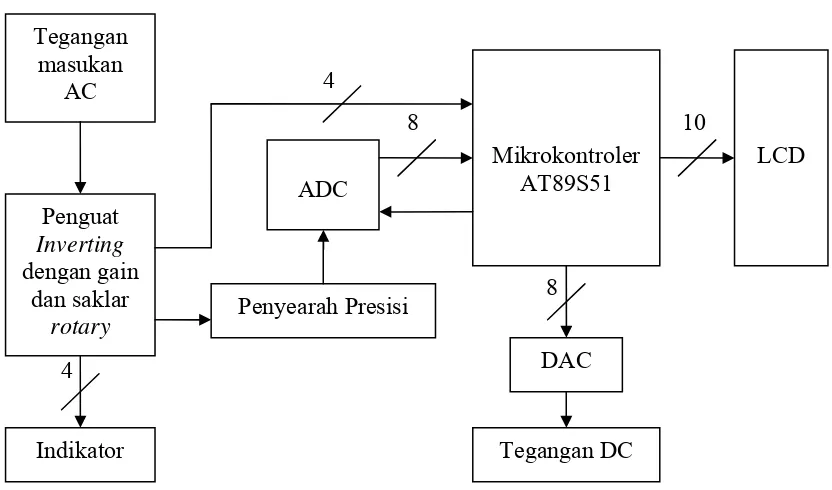
3.1 Diagram
Blok
Gambar 3-1 menunjukkan diagram blok perancangan alat ukur nilai
rms dan penyedia tegangan DC yang merepresentasikan nilai rms dari
masukan tegangan AC berbasis mikrokontroler AT89S51.
Tegangan
masukan
Mikrokontroler
AT89S51
AC
Penyearah Presisi
ADC
DAC
LCD
Tegangan DC
Penguat
Inverting
dengan gain
dan saklar
rotary
4
8 10
8
4
Indikator
Tegangan masukan AC terlebih dahulu melewati rangkaian penguat
inverting
yang dapat diatur penguatannya dengan saklar
rotary
agar sesuai
dengan jangkauan ADC dan penguat operasional. Keluaran dari penguat
inverting
akan melewati penyearah presisi sehingga keluaran dari
penyearah presisi selalu mempunyai nilai positif. Keluaran penyearah
presisi diumpankan menuju ADC yang digunakan agar nilai tegangan
masukan ADC bisa diproses oleh mikrokontroler karena sebelumnya
merupakan sinyal analog yang perlu diubah terlebih dahulu menjadi sinyal
digital.
Mikrokontroler mengambil data keluaran dari ADC sebanyak 8 bit
dengan 256 kali pencuplikan dengan kecepatan pengambilan data yang
konstan. Nilai tegangan rms hasil pencuplikan akan dicari oleh
mikrokontroler. Nilai rms sebanyak 8 bit akan diteruskan mikrokontroler
menuju DAC dan akan menampilkannya ke LCD setelah disesuaikan
dengan pemilihan jangkauan level tegangan pada saklar
rotary
. Proses
penampillan nilai rms ke LCD membutuhkan 10 bit data dan 4 bit data
dibutuhkan untuk pemilihan jangkauan level tegangan pada saklar
rotary
.
Keluaran DAC adalah nilai tegangan DC yang merepresentasikan nilai
rms dari masukan tegangan AC dengan indikator sebagai pengali nilai
3.2 Perancangan
Perangkat
Keras
3.2.1
Rangkaian Penguat Inverting dengan Gain dan Saklar
Rotary
Rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
ini
digunakan untuk membatasi nilai amplitudo tegangan masukan AC, saat
amplitudo tegangan masukan AC melebihi tegangan masukan maksimum
ADC0804 yaitu 5Volt. Sesuai dengan batasan masalah, maka digunakan 4
gain
untuk amplitudo masukan tegangan AC maksimum 500Volt, 50Volt,
5Volt dan 0,5Volt. Pemilihan Ri
invdan Rf
inv, didasarkan pada kebutuhan
gain
sebesar 10; 1; 0,1; dan 0,01kali. Resistor terbesar yang ada di pasaran
adalah 1Mega
Ω
. Untuk
gain
sebesar 10 yaitu
gain
terkecil dalam
perancangan rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
maka akan digunakan resistor
feedback
Rf
inv1sebesar 1Mega
Ω
sesuai
dengan resistor terbesar yang ada di pasaran.
Nilai
gain
untuk amplitudo masukan tegangan AC maksimum
0,5Volt ditentukan sebagai berikut:
Av
inv1=
Vi
Vo
(3-1)
Av
inv1=
5
,
0
5
Av
inv1= 10
Rf
inv1= Av
inv1. Ri
inv(3-2)
Ri
inv1=
10
10
6Ri
inv1= 100K
Ω
Nilai
gain
untuk amplitudo masukan tegangan AC maksimum 5Volt
ditentukan sebagai berikut:
Av
inv2=
Vi
Vo
(3-3)
Av
inv2=
5
5
Av
inv2= 1
Dengan menggunakan Ri
invsebesar 100K
Ω
sesuai persamaan 3-2, maka
nilai Rf
inv2dapat dihitung
Rf
inv2= Av
inv2. Ri
inv(3-4)
Rf
inv2= 1 . 10
5Rf
inv2= 100k
Ω
Nilai penguatan untuk amplitudo masukan tegangan AC maksimum
50Volt ditentukan sebagai berikut:
Av
inv3=
Vi
Vo
(3-5)
Av
inv3=
50
Av
inv3=
0
,
1
Dengan menggunakan Ri
invsebesar 100K
Ω
sesuai persamaan 3-2, maka
nilai Rf
inv3dapat dihitung
Rf
inv3= Av
inv3. Ri
inv(3-6)
Rf
inv3= 0,1 . 10
5Rf
inv3= 10 k
Ω
Nilai penguatan untuk amplitudo masukan tegangan AC maksimum
500Volt ditentukan sebagai berikut:
Av
inv4=
Vi
Vo
(3-7)
Av
inv4=
500
5
Av
inv4=
0
,
01
Dengan menggunakan Ri
invsebesar 100K
Ω
sesuai persamaan 3-2, maka
nilai Rf
inv4dapat dihitung
Rf
inv4= Av
inv4. Ri
inv(3-8)
Rf
inv4= 0,01 . 10
5Rf
inv4= 1k
Ω
Rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
Ri inv
100k
Rf inv 3
10k Rf inv 2
100k Rf inv 1
1Meg
SW1
SW ROTARY 2P-5W
12
1 2 3 4 5 6
7 8 9 10
11
+
-U1 LF356
3 2
6 tegangan masukan AC
tegangan keluaran pembalik
Rf inv 4
1k
Gambar 3-2. Rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
.
3.2.2 Rangkaian Penyearah Presisi
Rangkaian penyearah presisi digunakan untuk mendapatkan harga
mutlak dari tegangan keluaran rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
. Tegangan keluaran maksimum dari rangkaian penguat
inverting
dengan
gain
dan saklar
rotary
telah sesuai dengan tegangan
masukan ADC0804 yaitu 5Volt, maka penguatan untuk rangkaian
penyearah presisi ditentukan sebagai berikut:
Av
pp=
Vi
Vo
(3-9)
Av
pp=
5
5
Dengan mengacu pada gambar 2-8, maka dua buah resistor yang dibutuhkan
adalah sebesar R dan
R
2
. Resistor yang terdapat dipasaran untuk
memenuhi kedua nilai resistor tersebut tanpa menghubungkan resistor
secara seri maupun paralel, adalah pasangan resistor R sebesar 20K
Ω
dan
resistor
R
2
sebesar 10K
Ω
. Dengan pemilihan R
ppsebesar 20K
Ω
maka nilai
Rf
ppdapat dihitung
Rf
pp= Av
pp. R
pp(3-10)
Rf
pp= 1 . 2.10
5Rf
pp= 20k
Ω
Dioda yang digunakan adalah 1N4148 karena gelombang keluarannya
bisa tetap stabil dengan frekuensi tinggi dan mempunyai kecepatan respon
yang tinggi. Rangkaian penyerah presisi ditunjukkan gambar 3-3.
R2 pp 20K
Rf pp 20K
+
-U3 LF356
3 2
6 tegangan keluaran pembalik
D2 pp 1N4148 R1 pp
20K
R pp/2 10K D1 pp
1N4148
+
-U2 LF356
3 2
6
R3 pp 20K
tegangan keluaran peny earah presisi
3.2.3 Hubungan Sinyal Terkondisi dengan ADC0804
Pin
start conversion
ADC (
C
S
) dihubungkan ke
ground
agar
ADC0804 selalu melakukan konversi data. Pin
R
D
pada ADC 0804 juga
dihubungkan ke
ground
sehingga ADC selalu membaca data dari
mikrokontroler. Pin
WR
dihubungkan dengan P0.0 pada Mikrokontroler
AT89s51 yang bertujuan agar penulisan data dari ADC0804 menuju
mikrokontroler dapat dikendalikan oleh mikrokontroler.
Tegangan masukan ADC0804 adalah tegangan keluaran
penyearah presisi yang dihubungkan pada pin +IN. Berdasarkan
datasheet
, untuk mencapai waktu konversi ADC0804 sebesar 100µs,
dibutuhkan resistor 10K
Ω
dan kapasitor 150pF. Pada rangkaian ini, juga
digunakan dioda zener 5,1Volt sebagai pembatas tegangan agar saat
tegangan masukan ADC0804 bernilai sama dengan tegangan saturasi
penguat operasional, tegangan tersebut tidak merusak IC ADC0804.
CAP ADC 150pf D5 5,1V R ADC 10k 5 Volt
tegangan keluaran peny earah presisi
U4 ADC0804 6 7 9 11 12 13 14 15 16 17 18 19 4 5 1 2 3 10 8 20 +IN -IN VREF/2 DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 CLKR CLKIN INTR CS RD WR D GND A GND VCC
Gambar 3-4. Hubungan sinyal terkondisi dengan ADC0804.
Tegangan masukan positif dibatasi sebesar 5,1Volt sesuai dengan nilai
–0,7Volt, sesuai dengan tegangan maju dioda silikon. Hubungan sinyal
terkondisi dengan ADC ditunjukkan pada gambar 3-4.
3.2.4 Antarmuka ADC 0804 dengan Mikrokontroler AT89s51
Antarmuka antara ADC0804 dengan Mikrokontroler AT89s51
ditunjukkan pada gambar 3-5.
5V P0.1 P0.5 P0.3 P0.6 P1.7 P0.7 P1.6 P3.2 P1.4 P0.4 VCC EA/VPP P1.5 P1.3 RST P0.2 P1.0 P1.2 P0.0 ALE/PROG PSEN P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0 GND XTAL1 XTAL2 P3.7 P3.6 P3.5 P3.4 P3.3 P3.1 P3.0 P1.1 U5 AT89s51 38 18 36 19 7 20 6 21 4 30 17 40 31 5 3 8 37 1 2 39 9 10 11 12 13 14 15 16 35 34 33 32 29 28 27 26 25 24 23 22 U4 ADC0804 6 7 9 11 12 13 14 15 16 17 18 19 4 5 1 2 3 10 8 20 +IN -IN VREF/2 DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 CLKR CLKIN INTR CS RD WR D GND A GND VCC
Gambar 3-5. Antarmuka AT89s51 dengan ADC0804.
Jalur data dari ADC0804 pada pin 18, 17, 16, 15, 14, 13, 12, 11
pada Mikrokontroler AT89s51. Pin
start conversion
ADC (
C
S
)
dihubungkan ke
ground
agar ADC0804 selalu melakukan konversi data.
Pin
R
D
pada ADC 0804 juga dihubungkan ke
ground
sehingga ADC
selalu membaca data dari mikrokontroller. Pin
W
R
dihubungkan dengan
P0.0 pada Mikrokontroler AT89s51 yang bertujuan agar penulisan data
dari ADC0804 menuju mikrokontroler dapat dikendalikan oleh
mikrokontroler. Dengan mengacu pada persamaan 2-17, resolusi pada
ADC adalah
1
2
5
8
−
=
Volt
resolusi
= 0,0196Volt/step
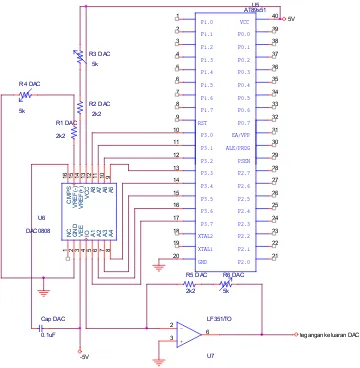
3.2.5 Antarmuka Mikrokontroler AT89s51 dengan DAC0808
Antarmuka antara Mikrokontroler AT89s51 dengan DAC0808
ditunjukkan pada gambar 3-6. Jalur data dari DAC0808 pada pin 12, 11,
10, 9, 8, 7, 6, 5 dihubungkan dengan pin P3.0, P3.1, P3.2, P3.3, P3.4,
P3.5, P3.6, P3.7 pada Mikrokontroler AT89s51. DAC0808 berfungsi
untuk mengubah masukan dengan bentuk digital menjadi keluaran dengan
bentuk analog. Keluaran DAC0808 merupakan masukan bagi rangkaian
pengubah arus menjadi tegangan karena IC DAC0808 mempunyai
keluaran berupa arus. Dengan mengacu pada persamaan 2-19, resolusi
pada DAC adalah
1
2
0
5
8
−
−
=
Volt
Volt
Arus Io yang dibutuhkan adalah 2mA, apabila menggunakan Vref(+)
sebesar 5Volt dibutuhkan resistor sebesar:
R
Vref
Io
=
(
+
)
(3-11)
3
10
.
2
5
)
(
−=
+
=
Io
Vref
R
= 2,5K
Ω
Arus Io akan berbentuk gelombang
ramp
dan dibagi menjadi 256 bagian
oleh biner 8 bit.
P0.1 P0.5 P0.3 P0.6 P1.7 P0.7 P1.6 P3.2 P1.4 P0.4 VCC EA/VPP P1.5 P1.3 RST P0.2 P1.0 P1.2 P0.0 ALE/PROG PSEN P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0 GND XTAL1 XTAL2 P3.7 P3.6 P3.5 P3.4 P3.3 P3.1 P3.0 P1.1 U5 AT89s51 38 18 36 19 7 20 6 21 4 30 17 40 31 5 3 8 37 1 2 39 9 10 11 12 13 14 15 16 35 34 33 32 29 28 27 26 25 24 23 22 U6 DAC0808 6 7 9 10 11 12 13 14 15 4 5
1 2 3 8
16 A2 A3 A5 A6 A7 A8 VC C VR EF (+ ) V R EF (-) IO A1 NC GN D VE E A4 CMP S R4 DAC 5k -5V R3 DAC 5k 5V R5 DAC 2k2 R1 DAC 2k2
tegangan keluaran DAC
Cap DAC 0.1uF + -U7 LF351/TO 3 2 6 R2 DAC 2k2 R6 DAC 5k
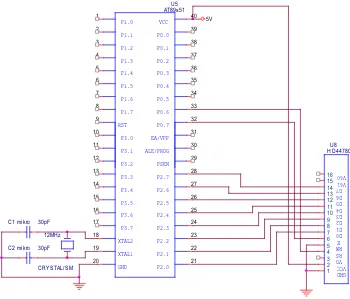
3.2.6 Antarmuka Mikrokontroler AT89s51 dengan HD44780
Antarmuka antara Mikrokontroler AT89s51 dengan HD44780
ditunjukkan pada gambar 3-7. Jalur data dari HD44780 pada pin 7, 8, 9,
10, 11, 12, 13, 14 dihubungkan dengan pin P2.0, P2.1, P2.2, P2.3, P2.4,
P2.5, P2.6, P2.7 pada Mikrokontroler AT89s51. Pin E (
enable clock
)
pada HD44780 dihubungkan dengan pin P0.7 pada Mikrokontroler
AT89s51. Pin RS (
register select
) pada HD44780 dihubungkan dengan
pin P0.6 pada mikrokontroler AT89s51. Pin
W
R
dihubungkan dengan
ground
supaya HD44780 selalu melakukan proses menulis.
12MHz CRY STAL/SM 5V GND VCC VO RS RW E D0 D1 D2 D3 D4 D5 D6 D7 V61 V60 U8 HD44780 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 P0.1 P0.5 P0.3 P0.6 P1.7 P0.7 P1.6 P3.2 P1.4 P0.4 VCC EA/VPP P1.5 P1.3 RST P0.2 P1.0 P1.2 P0.0 ALE/PROG PSEN P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0 GND XTAL1 XTAL2 P3.7 P3.6 P3.5 P3.4 P3.3 P3.1 P3.0 P1.1 U5 AT89s51 38 18 36 19 7 20 6 21 4 30 17 40 31 5 3 8 37 1 2 39 9 10 11 12 13 14 15 16 35 34 33 32 29 28 27 26 25 24 23 22
C2 mikro 30pF C1 mikro 30pF
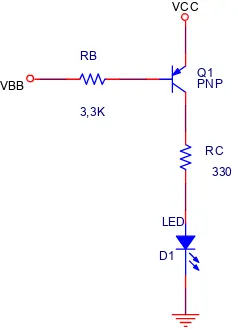
3.2.7 Indikator Berdasarkan Saklar
Rotary
Indikator yang digunakan berupa LED dengan rangkaian transistor
sebagai saklar aktif rendah. Rangkaian transistor sebagai saklar aktif
rendah dipilih agar saat terjadi perubahan pada masukkan mikrokontroler,
dapat dideteksi oleh mikrokontroler karena mikrokontroler mempunyai
kondisi normal aktif tinggi. Indikator ini berguna sebagai pengali hasil
tegangan keluaran DAC agar sesuai dengan pemilihan skala pada saklar
rotary
, karena tegangan keluaran DAC maksimal 5Volt.
Pada perancangan rangkaian transistor sebagai saklar aktif rendah
dipilih transistor PSS9012 yang merupakan
general purpose transistor
.
Gambar 3-8 menunjukkan rangkaian transistor sebagai saklar aktif rendah.
Q1 PNP
VBB
VCC
D1 LED
RC 330 RB
3,3K
Gambar 3-8. Rangkaian transistor sebagai saklar aktif rendah.
Berdasarkan
datasheet
, didapatkan tegangan emitor kolektor saturasi
sebesar 250mVolt,
hfe
minimum sebesar 40, tegangan pada LED sebesar
maka penulis menggunakan 10mA. Dengan mengacu pada persamaan
2-20, besar nilai RC adalah
m
RC
10
2
,
1
25
,
0
5
−
−
=
m
RC
10
55
,
3
=
RC
=
355
Ω
Dengan mengacu pada persamaan 2-21, besar nilai arus basis adalah
40
10
m
Ib
=
Ib
=
250
µA
Keadaan saturasi terjadi apabila nilai
Ib
cukup besar, sehingga untuk
memastikan terjadinya keadaan saturasi maka digunakan 1mA (4x250µA).
Dengan mengacu pada persamaan 2-23, besar nilai RB adalah
3
10
1
7
,
0
5
−
×
−
=
RB
RB
=
4
,
3
K
Ω
Berhubung nilai resistor 4,3K
Ω
tidak terdapat di pasaran maka digunakan
resistor 3,3K
Ω
sedangkan untuk resistor 355
Ω
digunakan nilai
pendekatannya yaitu 330
Ω
. Nilai RB sebesar 3,3K
Ω
akan mengakibatkan
nilai
Ib
yang semakin besar dan akan lebih memastikan untuk terjadinya
saturasi. Dengan mengacu pada persamaan 2-23, besar nilai arus basis bila
K
Ib
3
,
3
7
,
0
5
−
=
=1,3mA
Ib
Sesuai dengan batasan masalah maka digunakan 4 gain yaitu
dengan tegangan masukan maksimum 500Volt, 50Volt, 5Volt dan
0,5Volt yang berarti menggunakan 4 rangkaian transistor sebagai saklar
aktif rendah, dengan RC1=RC2=RC3=RC4=RC, dan
RB1=RB2=RB3=RB4=RB.
D1 LED Q4 9012 RC4 330 VCC RC1 330 SW1SW ROTARY 2P-5W
12 1 2 3 4 5 6 7 8 9 10 11 VCC VCC RB1 3,3K Q1 9012 RB4 47K Q3 9012 RC2 330 VCC P0.1 P0.5 P0.3 P0.6 P1.7 P0.7 P1.6 P3.2 P1.4 P0.4 VCC EA/VPP P1.5 P1.3 RST P0.2 P1.0 P1.2 P0.0 ALE/PROG PSEN P2.7 P2.6 P2.5 P2.4 P2.3 P2.2 P2.1 P2.0 GND XTAL1 XTAL2 P3.7 P3.6 P3.5 P3.4 P3.3 P3.1 P3.0 P1.1 U5 AT89s51 38 18 36 19 7 20 6 21 4 30 17 40 31 5 3 8 37 1 2 39 9 10 11 12 13 14 15 16 35 34 33 32 29 28 27 26 25 24 23 22 RB3 3,3K D2 LED D4 LED D3 LED Q2 9012 RC3 330 RB2 3,3K
Gambar 3-9 Antarmuka rangkaian indikator dengan Mikrokontroler
VBB dari masing-masing rangkaian transisitor sebagai saklar aktif rendah
dihubungkan dengan pin P0.1, P0.2, P0.3, dan P0.4 pada Mikrokontroler
AT89s51 serta saklar
rotary
sehingga saat VBB terhubung ke
ground
maka LED akan menyala dan juga akan memberi perubahan masukan
pada mikrokontroler. Gambar 3-9 menunjukkan antarmuka 4 rangkaian
transistor sebagai saklar aktif rendah dengan Mikrokontroler AT89s51.
3.3 Perancangan
Perangkat
Lunak
3.3.1 Kerangka Utama Program
Kerangka utama program tampak pada gambar 3-10. Secara garis
besar, program dimulai dengan inisialisasi LCD. Program kemudian
mengambil nilai tegangan dengan 256 kali pencuplikan dengan kecepatan
pengambilan data yang konstan. Kecepatan pengambilan tiap data adalah
sebesar 400µS.
Nilai tegangan digunakan untuk mencari nilai
root mean
square
dengan cara menghitung kuadrat nilai-nilai tegangan, kemudian
mencari reratanya dan akhirnya mencari akar kuadrat. Proses mencari nilai
root mean square
dilakukan sebanyak 16 kali. Mikrokontroler akan
mencari rerata dari enam belas nilai
root mean square
yang telah
didapatkan. Hasil rerata tersebut dikirimkan juga menuju DAC dan
ditampilkan pada LCD. Selanjutnya program kembali melakukan
MULAI
SUBRUTIN
AMBIL NILAI
TEGANGAN,
KUADRATKAN DAN
JUMLAHKAN
SUBRUTIN CARI RERATA
DAN AKAR
SUBRUTIN INISIALISASI LCD
SUBR
DAN T
UTIN KELUARAN
AMPILAN
SUDAH
16
KALI?
T
Y
Gambar 3-10. Diagram alir kerangka utama program.
3.3.2
Inisialisasi LCD
Diagram alir subrutin inisialisasi LCD ditunjukkan pada gambar
3-11, dan diagram alir subrutin kirim perintah ditunjukkan pada gambar
3-12. Subrutin inisialisasi LCD digunakan untuk mengatur operasi LCD.
instruksi LCD, sehingga pin RS harus mendapat logika rendah. LCD
memerlukan waktu untuk memproses instruksi-instruksi dan waktu tunda
sebelum dapat memproses instruksi-instruksi selanjutnya.
PANGGIL DELAY 2mS SEBANYAK 10 KALI
SUBRUTIN KIRIM PERINTAH
AKUMULATOR = #0DH
AKUMULATOR = #38H
AKUMULATOR = #03H
MULAI