BAB II
PEMBAHASAN MATERI
2.1 MESIN PEMINDAH BAHAN
Mesin pemindah Bahan merupakan suatu system peralatan yang digunakan untk mengangkat/memindahkan muatan dari suatu tempat ke tempat lain, dimana jumlah, ukuran dan jarak pemindahannya terbatas.
Mengingat perkembagan ilmu pengetahan dan teknologi dan kemajuan di bidang industri maka diperlukan mesin pemindah bahan yang tepat yang akan meningkatkan efisiensi dari aktivitas tersebut.
2.2. KLASIFIKASI MESIN PEMINDAH BAHAN
Banyaknya Jenis Mesin Pemindah Bahan yang tersedia membuatnya sulit digolongkan secara tepat. Penggolongan ini masih diperumit lagi oleh kenyataan bahwa penggolongan ini juga didasarkan pada berbagai karakteristik, misalnyadesain, tujuan, jenis gerak dan sebagainya.
Mesin pemindah bahan, dalam operasinya dapat diklasifikasikan atas: 1. Alat Pengangkat
Contohnya : - Elevator - Escalator - Crane
2. Alat pengangkut Contohnya: - Konveyor
Bila digolongkan berdasarkan jenis gerakannya, maka dapat dibedakan atas:
1. Gerak naik dan turun (hoist) 2. Gerak transversal
3. Gerak longitudinal
2.3 PEMILIHAN JENIS MESIN PEMINDAH BAHAN
Dalam perencanaan ini dipilih mesin pemindah bahan dengan gerakan naik turun. Adapun mesin pemindah bahan yag akan direncakan nantinya akan ditempatkan dalam suatu ruangan yang mempunyai ruang gerak yang terbatas. Oleh karena itu faktro faktor yang perlu dipertimbangkan dalam pemilihan jenis Mesin Pemindah bahan a gang sesuai adalah:
1. Penempatan peralatan sedapat mungkin tidak mengganggu aktivitas dan ruang gerak Pekerja/Karyawan
2. Aman dan efisien dalam operasi
3. Nyaman dalam pemakaian, sebab muatan yang akan diangkut adalah manusia. Sehubungan dengan pertimbangan faktor faktor kondisi kerja tersebut diatas maka dipilih lift sebagai alat pemindah bahan yang sesuai.
2.4. LIFT DAN CARA KERJANYA
Lift adalah alat pengangkat yang ditujukan khusus untuk mengangkat/memindahkan barang atau orang secara vertical didalam sangkar yang begerak pada rel penuntun tetap.
Adapun cara kerja dari lift ini adalah dengan gerakan naik turun (hoist) dimana sangkar yang berisi barang atau orang dan beban engimbang digantungkan pada tali yag ditarik naik atau turun dengan menggunakan pully, dimana pully ini berputara sesuai dengan kebutuhan. Pully digerakkan oleh motor listrik dan gerakan pully dihentikan oleh rem, sehingga barang atau orang tidak akan naik atau turun setelah posisi angkat yang diingin tercapai.
2.4.1. Pemakaian Lift dapat dibagi atas beberapa klasifikasi, yaitu : 1. Pemakaian umum atau perniagaan (General Purpose or Comercial)
yaitu tipe lift yang digunakan pada pemakaian yang bersifat umum. Contohnya : Pada kantor kantor atau perusahaan.
2. Pemakaian pada tempat tinggal (Residential)
Yaitu tipe lift yang digunakan pada rumah tempat tinggal Contohnya : pada rumah tempat tinggal
3. Pemakaian pada supermarket (Store)
Yaitu tipe lift yang dipergunakan pada swalayan atau pusat perbelanjaan. 4. Pemakaian pada lembaga-lembaga (Institutional)
Yaitu tipe lift yang dipakai pada bangunan untuk suatu bentuk kelembagaan Contohnya: Pada lembaga Pendidikan
2.4.2. Pemasangan Lift
Ditinjau dari segi pemasangan, ada dua cara pemasangan lift, yaitu: 1. Pemasangan dengan satu sangkar (Single Car)
Didalam suatu gedung hanya terdapat satu sangkar saja atau dengan kata lain gedung tersebut hanya dilayani oleh satu unit lift saja. Pemasangan ini biasanya terdapat pada gedung yag tidak beitu tinggi dan tidak luas serta lalau lintas pemakaiannya tidak ramai.
2. Pemasangan dengan lebih dari satu sangkar
Pada bangunan tersebut terdapat lebih dari satu sangkar. Jika ada panggilan akan terjadi respond an interaksi antara beberapa sangkar tersebut. Sangkar yang paling dekat dan tidak sedang bekerjalah yang akan melayani panggilan tersebut. System ini dipakai pada gedung bertingkat banyak serta luas dan mempunyai lalu lintas pemakaian yang ramai.
2.4.3. Ruang Peletakan Mesin
Bila ditinjau dari ruang tempat peletakan mesin utama dari lift, terdapat dua tipe system peletakannya yaitu :
1. Penthous Machine Room Type
Mesin lift ditempatkan pada bagian atas sangkar lift 2. Basement Machine Room Type
Sistem Penggerak Lift
Bila ditinjau dari system penggerak lift, terdapat dua system yang digunakan pada gedung gedung:
1. Penggerak Lift System Warp 2. Penggerak Lift system Hidrolik a. Penggerak Lift Sistem Warp
Pada system ini penggerak utama dari sangkar lift tersebut adalah motor listrik, dari motor tesebut akan dikopelkan ke poros mesin lift (driving Machine), yaitu suatu alat yang menggerakkan puli penggerak dan selanjutnya pully penggerak akan menarik tali yang diikat pada sangkar lift dan beban peimbang. Dengan demikian sangkar lift dan beban pengimbang akan bergerak naik atau turun sesuai dengan putaran pully penggerak.
System pemasangan tali pada istem Wrap dapat dibedakan berdasarkan peletakan ruang mesin.
- Penthouse Mechine Room
Pemasangan tali pada system warp pada Penthouse Mechine Room type dapat dilihat pada gambar 1.1.
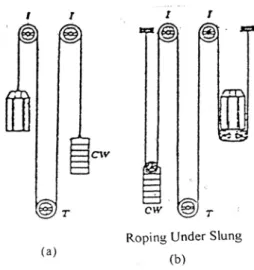
a. Single Wrap Roping
Tali dipasang satu kali jalan, tanpa lilitan diletakkan diatas puli dan melalui katrol, kemudian tali diikatkan diatas sangkar lift dan beban pengimbang (gambar a )
b. Double wrap Roping
Ada dua cara pemasangan tali pada jenis Doble Wrap Roping ii yaitu tali dipasang satu kali lilit pada pully dan katrol, kemudian tali diikatkan diatas
sangkar lift dan beban pengimbang (gambar c) atau tali dipasang dua kali lilit tali diletakkan diatas puli diatas pully dan dililitkan ke katrol, selanjutnya ke atas sebagai titik tumpuan beban (Point Support). (Lihat gambar 2.1. di bawah ini )
Gaambar 2.1. Pemasangan tali pada system Wrap Penthouse Machine Room Type
- Basement Machine Room
Pemasangan tali pada system wrap pada basement Machine Room Type dapat dilihat pada gambar 1.2
- Roping Under Slung
Sangkar lift dan beban pengimbang ditahan oleh dua buah katrol, selanjutnya pulli penggerak yang berada dibawah sangkar akan memutar kedua katrol yang menggerakkna sangkar lift dan beban pengimbang dalam arah yang saling berlawanan ( gambar a dan b ) (Lihat gambar 2.2. di bawah ini )
Gambar 2.2. Pemasangan Tali pada Sistem Wrap – Basement Machine Room Type
b. Penggerak Lift Sistem Hidrolik
Lift system hidrolik memerlukan daya lebih kecil dibandingkan dengan system wrap. Nama hidrolik diberikan karena sangkar ini digerakkan oleh sebuah pompa yang dilayani oleh sebuah motor penggerak, sehingga dengan perubahan tekanan pada minyak (oil) akan menyebabkan aik atau turunnya sangkar lift.
System hidrolik dan cara kerjanya persis sama dengan dongkrak mobil hidrolik, minyak dari penampung dipompakan oleh plunyer untuk mengangkat sangkar lift tersebut. Pompa dihentikan sampai titik terbawah, selanjutnya sangkar lift tersebut diturunkan dengan gaya gravitasi dan Bypass control yang juga mengotrol posisi dari sangkar lift tersebut sampai pada titik tertinggi.
System control yang digunakan pada lift dengan system pengerak hidrolik biasanya sama dengan yang tedapat pada system penggerak wrap. Namun pada system penggerak hidrolik ini tidak diberikan beban pengimbang sehingga memerlukan motor dengan daya yang lebih besar dibandingkan dengan kebutuhan motor untuk keperluan yang sama pada system Wrap.
Berdasarkan pertimbangan dari uraian diatas maka pada perencanaan ini system pengerak lift yang akan dipergunakan adalah system Wrap dengan peletkana motor pada bagian atas sangkar (Penthouse Machine Room Type) dengan pemasangan tali satu kali jalan ( single Wrap Roping).
2.4.6. Methode pengoperasian Lift
Methode pengoperasian Lift adalah cara kerja lift dalam memberikan respon terhadap panggilan yang diberikan penumpang.
Methode operasi lift secra umum dibedakan atas dua cara, yaitu: 1. Pengoperasian Manual
Pengoperasian manual merupakan system pengoperasian sangkar lift dengankecepatan renda dan dapat berhenti pada posisi sembarangn titik yang dikehendaki, misalnya nutk kondisi perawatan atau untuk keperluan khusus,
Dalam pengoperasiannya lift diatur oleh seorang operator. Dengan demikian semua panggilan harus dikirim ke meja operator, kemudan operator mengatur gerakan sangkar lift ke posisi level lantai yang diinginkan/dipesan penumpang methode ini jarang digunakan mengingat kurang praktisnya di dalam penggunaanya.
2. Pengoperasian Otomatis
Pengoperasian lift secara otomatis memberikan respon secara langsung kepada penumpang yang memanggil sangkar lift.
a. Metode Single Automatic Push Bottom
Pada metode operasi ini, pada setiap lantai hanya terdapat satu buah tombol untuk memanggil sangkar sedangkan didalam sangkar lift terdapat tujuan level lantai yang diinginkan. Selama lift bekerja, lift tidak melayani panggilan dari penumpang lain. Lift akan memberikan tanggapannya setelah lift selesai melaksankan tugasnya. Dengan kata lain lift baru dapat dipanggil apabila sangkar lift dalam keadaan tidak bekerja.
Dari penjelasan diatas prinisp kerja diatas, dapat dikatakan bahwa methode Single Automatic Push Bottom ini hanya dapat melayani panggilan satu persatu, artinya sangkar baru dapat dipanggil apabila lift dalam keadaan diam. Dengan demikian metode ini hanya efektif digunakan untuk gedung dengan dua atau tiga lantai. Dengan pemakaian lift yang tidak terlalu mendesak, misalnya untuk lift pengangkat barang. b. Metode Selective – Collective
Pada metode ini terdapat dua buah tombol panggilan pada setiap lantai yaitu tombol panggilan naik dan tombol panggilan turun. Kecuali pada lantai terendah dan tertinggi yang masing masing hanya terdapat satu tombol panggilan. Didalam sangkar lift terdapat tombol tujuan level lantai yang digunakan.
Metode operasi selective – collective ini lebih praktis dan efisien dalam menangani panggilan dibandingkan dengan Single Automatic Push Bottom. Pada methode ini, secara otomatis sangkar lift akan melanyai semua panggilan naik pada saat sangkar llift naik dan melaani semua panggilan turun pada lantai yang dilaluinya. Dengan demikian methode ini lebih efisien dalam menanggapi panggilan dibanding dengan metode Single Automatic Push Bottom karena sangkar lift dapat dipanggil walaupun lift dalam keadaan sedang bekerja.
c. Metoded Duplex-Collective
Pada prinsipnya metode duplex –collective ini hampir sama dengan metode selective-Collective merupakan operasi gabungan dari dua atau lebih lift yang bekerja secara Selective-Collective.
Pada metode ini, pada tiap lantai terdapat tombol bersama untuk memanggil sangkar lift. Apabila tombol panggilan ditekan maka sangkar dengan posisi paling dekat dan dengan arah yang sesuai dengan panggilan, akan melayani panggilan tersebut. Hal ini merupakan keistimewaan metode ini dibanding dengan metode Selective-Collective. Tombol tujuan terdapat pada setiap sangkar yang berfungsi untuk mengoperasikan sangkarnya masing-masing.
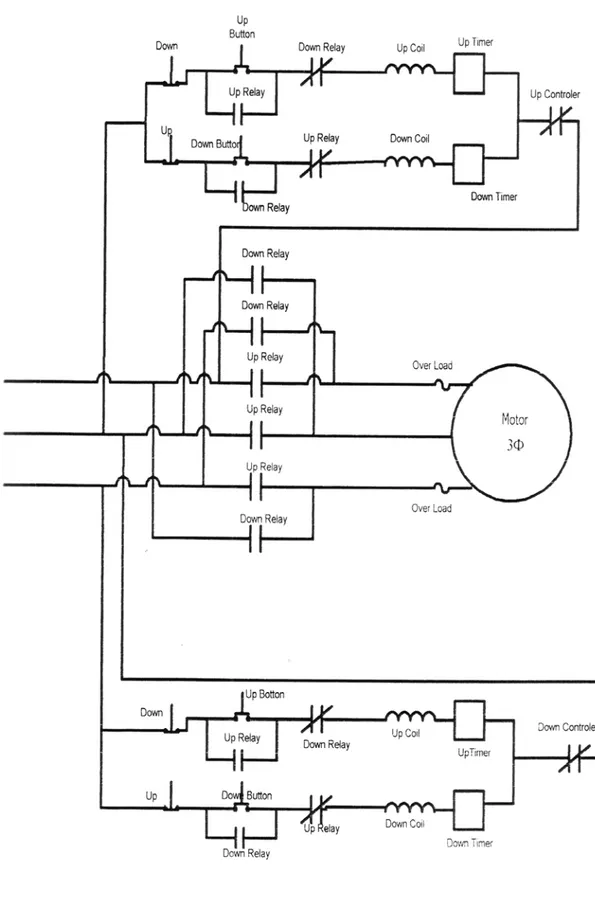
Dari pertimbangan pertimbangan pada urai diatas maka metode pengoperasian lift yag dipakai disini adalah pengoperasian otomatis dengan prinsip berdasarkan Metode-Duplex-Collective. (Lihat gambar 2.3. di bawah ini)
Gambar 2.3. Rangkaian Sistem Kontrol Lift R
S
Cara Kerja :
- Apabila tombol naik (Up Button) ditekan maka arus akan mengalir kekumparan naik (up Coil). Setelah kumparan berisi arus listrik, kumparan akan mengisi arus kepengatur waktu otomatis naik (Up Times) dan semua semua swich naik (Up Relay) akan menutup sehingga mengalirkan arus kemotor penggerak. Motor penggerak memutar kekanan mengangkat sangkar lift pada selang waktu oleh pengatur waktu otomatis naik (Up Times). Apabila pengatur waktu otomatis menyatakan selesai atau waktu untuk langkah tersebut selesai maka arus akan terhenti dan sangkar lift berhenti pada lantai yang diinginkan oleh pengatur waktu tersebut.
- Apabila tombol turun (down Button) ditekan maka arus akan mengalir pada kumparan turun (down Coil). Setelah kumparan berisi arus, kumparan akan mengisi arus ke pengatur waktu otomatis turun (down times) dan semua swich turun (down relay) akan menutup sehingga akan mengalirkan arus kemotor penggerak. Motor penggerak memutar kekiri dan menurunkan sangkar lift pada selang waktu yang ditentukan oleh pengatur waktu otomatis turun (down times) sampai pengatur waktu otomatis menyatakan selesai dan sangkar lift terhenti pada lantai yang diinginkan oleh pengatur waktu otomatis tersebut.
BAGIAN BAGIAN UTAMA LIFT
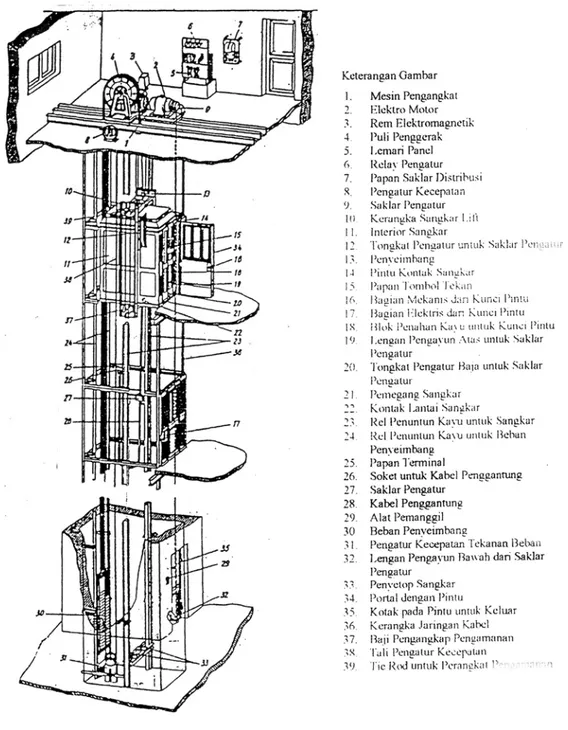
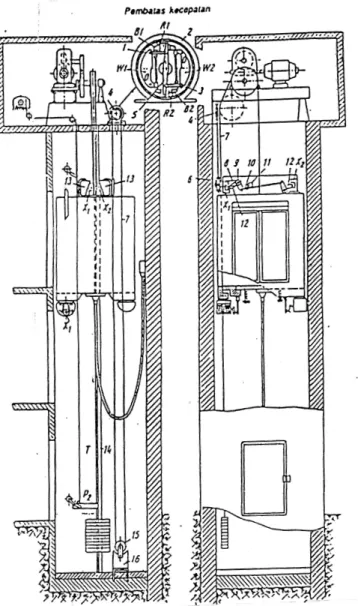
Bagian-bagian pada Luar atas sangkar (Phenthouse Mechine Rooms) Sebagian besar peralatan lift type Phenthouse Mechine Rooms ditempatkan dibagian atas sangkar lift. (dapat lihat gambar 2.4. di bawah ini)
Komponen-komponen utama peralatan lift type Phenthouse Mechine Room yang ditempatkan dibagian atas sangkar lift adalah :
- Electro motor - Mechine Lift - Rem Lift
- Lemari Panel Relay - Governor
1. Electro Motor
Penggerak utama lift adalah sebuah electromotor yang digerakkan oleh listrik PLN atau generator listrik yang dilengkapi dengan pengatur medan (Field Control) yang dikontrol secara numeric (Numerical Control).
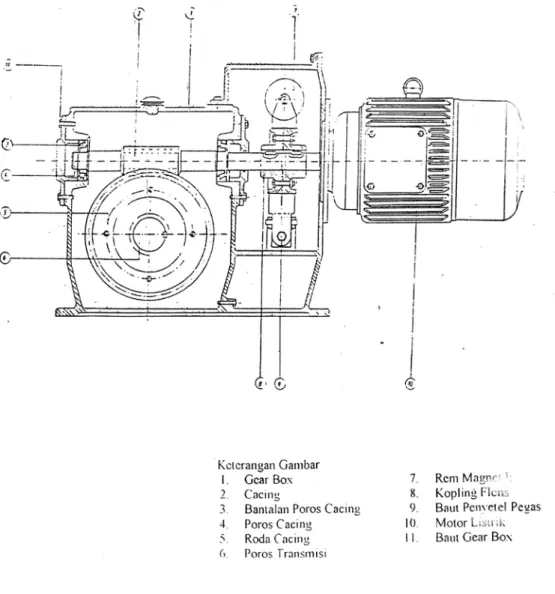
Electro Motor dikopel ke rangkai Gear Box yang berfungsi untuk mereduksi putaran electromotor dengan mesin lift (Elevator Driving Mechine), Pulli dan rem Listrik.
2. Mesin Lift
Design lift disini digunakan mesin pengangkat jenis pulli dan roda pulli penggerak. Pada design dengan drum, tali yang menahan sangkar diikatkan pada drum dan dililitkan pada permukaannya sedangkan pada desingn pada roda pully penggerak, penggerak tali melewati roda pulli yang digerakkan oleh gaya gesek.
Dalam perencanaan ini dipilih mesin pengangkat dengan pulli penggerak karena memiliki beberapa kelebihan diataranya:
3) Lebih efektif karena gaya teraksi pada roda pulli penggerak akan hilang bila sangkar yang sedang turun terbentuk hambatan. Dalam hal ini, kelonggaran pada bagian tali yang keluar dari pulli akan menyebabkan tergelincirnya oleh pulli pada tali sehingga tali akan mengencang kembali
4) Penggunaan mesin pengangkat jenis roda pulli ini telah mengurangi kecelakaan secara drastris akibat putusnya tali.
Mesin Lift penggerak roda pulli untuk elevator penumpang ditunjukkan pada gambar 2.5. dibawah ini :
3. Rem Lift
Prinsip Kerja Rem Lift sama dengan kontak NC dari suatu relay atau kontaktor, dimana rem dalam keadaan menjepit poros mesin lift pada saat sangkar lift tidak bekerja, sebaliknya rem akan melepaskan poros lift apabila coil rem listrik tersebut terenergi. Dengan demikian apabila sumber arus dari panel utama putus pada saat lift bergerak, penumpang akan aman dari bahaya benturan yang timbul apabila rem tidak menjepit poros mesin tersebut. Di bawah ini gambar 2.6. akan diperlihatkan konstruksi rem listrik untuk lift.
4. Lemari Panel
Lemari panel merupakan tempat sebagian besar peralatan listrik (komponen komponen control) disambungkan seperti relay, transformator dan penyearah. Tiap unit lift memiliki masing masing satu buah lemari panel.
5. Governor
Governor adalah merupakan pengaman kecepatan lebih (Over Speed). Prinsip kerjanya adalah berdasarkan gaya sentrifugal. Tali (Rope) governor dihubungkan kebagian atas dan bawah sangkar melalui dua buah pulli governor. Pulli governor ditempatkan diruang machine atas dan yang lainnya ditempatkan pada bagian bawah (basement) instalasi lift, sehingga pulli governor akan bergerak apabila sangkar lift bergerak.
2.5.2. Bagian-bagian pada Terowongan (Hoist Way)
Terowongan yang dimaksud pada system lift adalah terowongan vertical yang menjadi jalan atau saluran tempat dimana sangkar lift dan beban pengimbang bergerak naik dan turun.
Pada terowongan terdapat beberapa peralatan seperti : 1. Saklar pembatas
2. Sangkar lift
3. Beban pengimbang 4. Tali
5. Rell penuntun 6. Alat pengaman lift
1. Saklar Pembatas
Saklar pembatas berfungsi untuk menghubungkan atau memutuskan rangkaian dari system listrik dari sumbernya tanpa campur tangan operator, akan tetapi diaktifkan oleh sentuhan mekanik dari suatu material.
Pada pengoperasiannya ada beberapa pembatas sebagai saklar Bantu untuk pengaturan kerja rangkaian lift. Pada pengaman beban lebih sangkar lift, saklar pembatas lift ini akan bekerja jika beban atau penumpang yang masuk kedalam sangkar melampuai kapasistas (daya angkut) lift tersebut. Saklar pembatas juga digunakan pada operasi membuka dan menutup pintu lift serta juga terdapat pada setiap batas level lantai.
2. Sangkar Lift
Sangkar lift adalah suatu kerangka kendaraan yang mempunyai ruangan untuk tempat penumpang atau barang yang akan dipindahkan. Sangkar ini harus tertutup dan lengkapi dengan pintu.
Sangkar ini harus kokoh, ringan dan desainnya sederhana. Pada bagian dalam sangkar lift terdapat tombol tombol pengatur arah tujuan dan indicator posisi lift, lampu penerangan, push button, oper door, close door, ear phone, dan tombol stop hand/auto.
Berikut ini diperlihatkan gambar 2.7. Tata letak peralatan dan tombol operasi didalam sangkar lift.
3. Beban Pengimbang
Beban Pengimbang adalah beban pemberat untuk mengimbangi berat sangkar lift. Gerakan beban pengimbang berlawanan arah dengan sangkar lift. Dengan demikian secara tidak langsung beban pengimbang akan mengurangi daya yang harus disediakan oleh hoisting motor.
Beban pengimbang terdiri dari satu kerangka baja dengan design yang berlapis yang akan memudahkan pengaturan bobot dan penyederhanaan perakitan. Penggunaan beban pengimbang ini adalah untuk memberikan keuntungan konsumsi daya yang diperlukan lift.
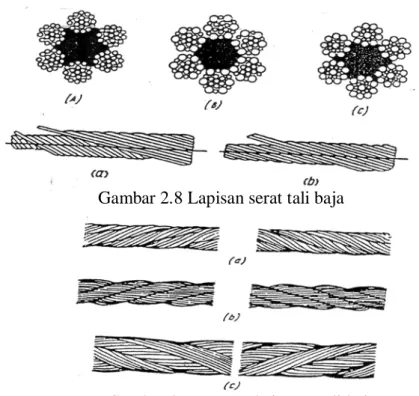
4. Tali Baja
Tali digunakan sebagai penghubung sangkar lift dengan beban pengimbang melalui pulli mesin lift, disamping itu juga digunakan untuk menghubungkan sangkar lift dengan governor sebagai sensor kecepatan lebih (Over Speed) lihat gambar 2.8. dan gambar 2.9. di bawah ini.
5. Rel Penuntun
Sangkar lift bergerak didalam lorong pada rel penuntun yang terpasang tetap. Untuk keperluan ini kedua sisi sangkar pada bagian atas dan bawah diberi dua penuntun yang bentuknya sesuai dengan rel penuntun.
Rel atau batang penuntun terbuat dari batang baja profil siku T- ganda atau batang kayu dan diikat pada kedua sisi lorong elevator. Rel diberi pelumas gemuk secara teratur. Kerugian gesekan pada rel penuntun diambil sebesar 5-10% dari bobot komponen gerak. Penuntuk dipasang pada tempat sempit diantara dua rel, sehingga dapat berfungsi untuk mencegah ketidakserasian sangkar lift. (Dapat dilihat gambar 2.10 di bawah ini.
Gambar 2.10 Rel Penuntun untuk Lift 6. Alat Pengaman Lift
Sangkar lift harus dilengkapi dengan alat pengaman khusus, yaitu penahan yang akan menghentikan sangkar secara otomatis bila tali putus atau kendur.
Banyak design pengaman lift yang dilengkapi dengan eksentris, baji, rol penjempit, pisau dan permukaan rem yang halus. Permukaan rem halus yang menjepit jalur penuntun dengan kuat sepanjang permukaan kontak merupakan alat yang efisien operasinya seperti yang telah dibicarakan sebelumnya.
Selain rem terdapat juga alat pengaman lift lainnya seperti: - pegas penahan
- penahan penggerak
a. Pegas penahan
Pegas penahan adalah merupakan suatu alat yang ditempatkan pada bagian dasar terowongan. Alat ini berfungsi untuk mengamankan sangkar lift agar tidak membentur landasan (dasar terowongan) apabila suatu saat tali pengikat lift dengan beban pengimbang putus. (Lihat gambar 2.11. di bawah ini)
Pegas penahan bekerja berdasarkan hidrolik yang dibantu dengan pegas (spring) dengan demikian bila sangkar jatuh secara tiba-tiba karena putusnya tali maka sangkar akan jatuh menimpa pegas penahan dan oleh pegas redaman hidrolik sangkar akan aman dari benturan yang sangat keras apabila sangkar langsung jatuh kedasar terowongan.
b. Penahan Gerak
Penahan gerak berfungsi untuk menghentikan lift secara otomatis, sebelum kecepatan lebih (over speed). Gerak dari penahan lift dikontrol oleh governor. Penahan gerak akan menghentikan sangkar bila satu buah tali atau semuanya putus secara bersamaan dan juga bila kecepatan penurunan menjadi semakin besar.