Monitoring Cairan Infus Menggunakan Modul Radio Frekuensi
YS 1020 UB Dengan Frekuensi 433 MHZ
Abdy Muslim#1, Iwan Setiawan,ST,MT#2, Budi Setiyono,ST,MT#3 # Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro
jl. Prof Sudharto, Tembalang, Semarang, Indonesia
#1 @abdi.mslm@gmail.com #2 setiaone.iwan@gmail.com #3 Budisty@gmail.com
Abstrak
—
Seringkali dalam suatu rumah sakit jumlah pasien tidak seimbang dengan jumlah petugas mediknya, khususnya pada bagian pelayanan keperawatan yang bertugas 24 jam memantau kondisi pasien rawat inap satu per satu. Akibat keterbatasan itu kemungkinan kelalaian petugas jaga sangat bisa terjadi, terutama pada pemantauan kondisi cairan infus pasien. Dalam tugasnya memantau kondisi infus pasien biasanya perawat harus memeriksa kondisi infus pasien tiap waktu yang telah diperkirakan sebelumnya, sehingga perawat harus mondar-mandir memeriksa keadaan dari infus pasien.Melihat kenyataan yang ada, maka pada tugas akhir ini dibuat suatu sistem monitoring cairan infus secara terpusat yang dapat mengontrol laju cairan infus pasien berbasis mikrokontroler AtMega8535 dengan metode pengontrolan proposional-derivatif dan dapat memberikan informasi mengenai kondisi cairan infus pasien aktual kepada petugas medik secara terpusat menggunakan Radio frekuensi YS1020UB sebagai sarana komunikasi antara mikrokontroler dengan komputer.
Kata kunci
—
cairan infus, laju cairan, Atmega8535, kontrol proposional-derivatif, Rf YS1020UBI. PENDAHULUAN
Seiring perkembangan zaman saat ini dan meningkatnya keperluan manusia akan suatu sistem yang dapat berkerja secara otomatis dan handal dalam membantu pekerjaan manusia dalam kehidupan sehari-hari, meliputi berbagai bidang kehidupan seperti bidang Industri, pangan, komunikasi, olah raga, pelayanan publik, kesehatan dan berbagai bidang lainnya.
Seringkali dalam suatu rumah sakit jumlah pasien tidak seimbang dengan jumlah petugas mediknya, khususnya pada bagian pelayanan keperawatan yang bertugas 24 jam memantau kondisi pasien rawat inap satu per satu. Akibat keterbatasan itu kemungkinan kelalaian petugas jaga sangat bisa terjadi, terutama pada pemantauan kondisi cairan infus pasien. Dalam tugasnya memantau kondisi infus pasien biasanya perawat harus memeriksa kondisi infus pasien tiap waktu yang telah diperkirakan sebelumnya, sehingga perawat harus mondar-mandir memeriksa keadaan dari infus pasien.
Apabila terjadi masalah pada infus seperti selang infus macet atau cairan infus habis, petugas jaga tidak mengetahuinya sebelum ada laporan dari kerabat yang menjaga pasien.
Maka pada tugas akhir ini akan dibuat sebuah alat berbasis mikrokontroler yang dapat mengotrol kestabilan tetesan cairan infus pasien dan dapat memberikan informasi kondisi cairan infus pasien secara realtime secara terpusat kepada petugas medik di suatu rumah sakit.
II. DASARTEORI
Dasar teori dari makalah monitoring cairan infus secara terpusat ini mencakup:
A. Infus
Infus cairan intravena ( intravenous fluids infusion ) adalah pemberian sejumlah cairan kedalam tubuh, melalui sebuah jarum, kedalam sebuah pembuluh vena (pembuluh balik) untuk menggantikan kehilangan cairan atau zat-zat makanan dari tubuh.
B. Komponen Sistem Infus
Infus terdiri dari beberapa komponen utama yaitu :
1) Botol infus : merupakan wadah dari cairan infus, biasa dijumpai dijual dalam tiga ukuran 500mL, 1000mL dan 1500mL .
2) Selang infus : merupakan sarana tempat mengalirnya cairan infus .
3) Klem selang infus : merupakan bagian untuk mengatur laju aliran dari cairan infus, dengan mempersempit atau memperlebar jalur aliran pada selang.
4) Jarum infus : Sarana masuknya cairan infus dari selang infus menuju pembulu vena.
(1) (2)
(3) (4) Gambar 1.komponen-komponen sistem infus
C. Prinsip Kerja Sistem Infus
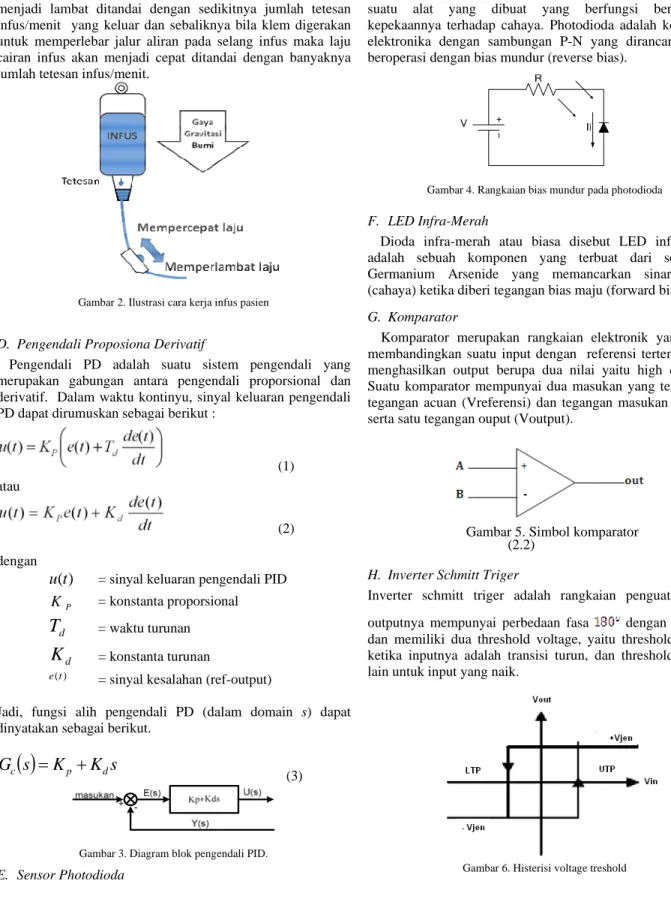
Prinsip kerja dari cairan infus sama seperti sifat dari air yaitu mengalir dari tempat yang tinggi ke tempat yang lebih rendah dipengaruhi oleh gaya grafitasi bumi sehingga cairan
akan selalu jatuh kebawah. Pada sistem infus laju aliran infus diatur melalui klem selang infus, jika klem digerakan untuk mempersempit jalur aliran pada selang maka laju cairan akan menjadi lambat ditandai dengan sedikitnya jumlah tetesan infus/menit yang keluar dan sebaliknya bila klem digerakan untuk memperlebar jalur aliran pada selang infus maka laju cairan infus akan menjadi cepat ditandai dengan banyaknya jumlah tetesan infus/menit.
Gambar 2. Ilustrasi cara kerja infus pasien
D. Pengendali Proposiona Derivatif
Pengendali PD adalah suatu sistem pengendali yang merupakan gabungan antara pengendali proporsional dan derivatif. Dalam waktu kontinyu, sinyal keluaran pengendali PD dapat dirumuskan sebagai berikut :
(1) atau (2) (2.2) dengan
)
(t
u
= sinyal keluaran pengendali PID P K = konstanta proporsional dT
= waktu turunan dK
= konstanta turunan ) (te = sinyal kesalahan (ref-output)
Jadi, fungsi alih pengendali PD (dalam domain s) dapat dinyatakan sebagai berikut.
( )
s
K
K
s
G
c=
p+
d(3)
Gambar 3. Diagram blok pengendali PID.
E. Sensor Photodioda
Photodioda merupakan salah satu contoh photodetektor, yaitu sebuah alat opto elektronika yang dapat mengubah cahaya datang menjadi besaran listrik. Photodioda adalah suatu alat yang dibuat yang berfungsi berdasarkan kepekaannya terhadap cahaya. Photodioda adalah komponen elektronika dengan sambungan P-N yang dirancang untuk beroperasi dengan bias mundur (reverse bias).
Gambar 4. Rangkaian bias mundur pada photodioda
F. LED Infra-Merah
Dioda infra-merah atau biasa disebut LED infra-merah adalah sebuah komponen yang terbuat dari solid-state Germanium Arsenide yang memancarkan sinar radiasi (cahaya) ketika diberi tegangan bias maju (forward bias). G. Komparator
Komparator merupakan rangkaian elektronik yang dapat membandingkan suatu input dengan referensi tertentu untuk menghasilkan output berupa dua nilai yaitu high dan low. Suatu komparator mempunyai dua masukan yang terdiri dari tegangan acuan (Vreferensi) dan tegangan masukan (Vinput) serta satu tegangan ouput (Voutput).
Gambar 5. Simbol komparator
H. Inverter Schmitt Triger
Inverter schmitt triger adalah rangkaian penguat dimana outputnya mempunyai perbedaan fasa dengan inputnya dan memiliki dua threshold voltage, yaitu threshold voltage ketika inputnya adalah transisi turun, dan threshold voltage lain untuk input yang naik.
I. Radio frekuensi YS1020UB
RF YS-1020UB merupakan modul komunikasi yang sangat aman, mempunyai 8 kanal dengan frekuensi yang berbeda, frekuensi yang digunakan pada sistem ini adalah 433 Mhz. Jarak jangkauan komunikasi sekitar 800 meter pada baudrate 9600 bps dan maksimum 2000 meter dengan baudrate 1200 bps.
Gambar 7. Modul RF YS-1020UB
III. PERANCANGAN
Perancangan alat pada tugas akhir ini meliputi perancangan perangkat keras dan perancangan perangkat lunak.
A. Perancangan Perangkat Keras
Perancangan perangkat keras pada sistem monitoring cairan infus secara terpusat meliputi mikrokontroler ATmega8535, sensor tetesan cairan infus, rangkaiaan komparator, rangkaian anti-bounching, LCD, motor servo, radio frekuensi YS-1020UB, komunikasi serial K125R dan rangkaian catu daya yang digunakan berasal dari trafo sedangkan untuk bagian radio frekuensi penerima menggunakan su mber tegangan yang berasal dari usb yang terdapat pada laptop.
Gambar 8. Diagram blok sistem monitoring cairan infus secara terpusat
1) Desain Mekanik
Sistem monitoring cairan infus secara terpusat ini memiliki bagian berupa pengontrol dari jumlah tetesan cairan infus, pada bagian inilah yang terdapat mekanik yang mengantikan fungsi dari klem infus. Terdiri dari dua bagian yaitu bagian penggerak penjepit selang infus dan bagian penjepit selang infus.
Bagian penggerak penjepit selang infuse ini terdiri dari motor servo posisi yang telah dimodifikasi agar dapat melakukan gerakan menutup dan membuka.
Sedangkan bagian penjepit selang infus merupakan bagian pengganti dari klem infus, berfungsi untuk mempersempit dan memperlebar jalur aliran infus, dengan mempersempit jalur aliran infus akan mengakibatkan jumlah tetesan cairan infus akan semakin berkurang dan begitu pula sebaliknya semakin lebar jalur aliran infus maka semakin banyak jumlah tetesan cairan infus.
Gambar 9. Desain mekanik (a) penggerak dan (b) penjepit selang infus
2) Sistem Minimum AVR
ATMega8535
Gambar 10. Alokasi port pada mikrokontroler
Penggunaan (alokasi) port mikrokontroler yang digunakan. PA.0-PA.7 digunakan keypad matriks 4x4, PA0-PA3 sebagai input dan PA.4-PA.7 sebagai output . Port B yang digunakan hanya satu port yaitu PB.0 sebagai port yang diberikan masukan dari output pengkondisi sinyal pembacaan sensor tetesan cairan infus.
Port C digunakan untuk menampilkan data ke LCD sedangkan port D yang digunakan hanya tiga port yaitu PD.0 dan PD.1 port yang digunakan sebagai komunikasi serial Tx dan Rx dari RF YS-1020UB. Lalu PD.5 dihubungkan dengan pwm dari motor servo.
3) Sensor Tetesan Cairan Infus
Sensor pendeteksi tetesan cairan infus ini terdiri dari satu buah LED infra merah dan sensor photodioda, LED infra-merah digunakan sebagai pemancar sedangkan photodioda digunakan sebagai penerima, sensor ini berkerja pada tegangan 3,5 -5 Volt.
4) Rangkaian Komparator
Bagian utama dari rangkaian komparator ini adalah ic LM339 ic ini memiliki empat buah komparator dengan empat output, pada rangkaian ini yang digunakan hanya satu komparator saja, yaitu komparator no 2. rangkaian komparator ini dibutuhkan karena sinyal keluaran dari sensor tetesan tidak dapat menghasilkan tegangan yang dapat dibaca oleh mikrokontroler yaitu logika high dan low.
Gambar 12. Rangkaian komparator
5) Rangkaian Anti-Bouncing
Rangkaian anti bouncing ini terdiri dari bagian untama yaitu ic 74HC14, ic ini terdiri dari 6 buah inverter dengan schmitt trigger, tapi pada rangkaian ini yang digunakan hanya 1 inverting Schmitt trigger. Tegangan Vcc yang diberikan sebesar 5 Volt, sedangkan untuk Vin berasal dari keluaran rangkaian komparator.
Gambar 13. Rangkaian anti-bouncing
B. Perancangan Perangkat Lunak Pada Mikrokontroler Bahasa pemograman mikrokontroler yang digunakan adalah bahasa C dengan kompiler CodeVisionAVR versi 2.03.9. dan metode kontrol yang digunakan untuk aplikasi ini adalah kontrol Proporsional Derivatif (PD). Berikut ini blok diagram yang menjadi acuan dalam perancangan program.
Gambar 14. Diagram blok system control cairan infus
1) Program utama
Program utama adalah program yang menggambarkan secara keseluruhan dari program yang dijalankan mikrokontroler dan dapat dilihat pada flowchart berikut ini :
Gambar 15. Flowchart program utama
C. Perancangan Perangkat Lunak Pada Komputer
Pembuatan perangkat lunak pada komputer dibuat dengan menggunakan software MS Visual C# 2010 dan perancangan dari aplikasi monitoring kondisi infus pasien pada komputer secara keseluruhan dapat dilihat pada flowchart berikut ini :
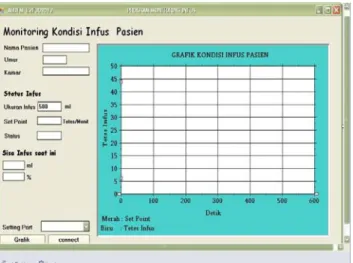
Gambar 16. Flowchart aplikasi monitoring kondisi infus Berikut desain dari aplikasi monitoring kondisi infus pasien pada komputer :
Gambar 17. Desain aplikasi monitoring kondisi infus pasien
Setelah desain aplikasi dibuat maka dilakukanlah pemograman terhadap komponen-komponen toolbox pada desain tersebut sesuai dengan rancangan yang program yang ditampilkan pada flowcahart program utama.
IV. PENGUJIAN DAN ANALISA
Pengujian dan analisa dilakukan pada perangkat keras dan perangkat lunak dari tugas akhir monitoring cairan infus ini. A. Pengujian Perangkat Keras
Pengujian perangkat keras dilakukan untuk membuktikan bahwa perangkat keras tersebut dapat berkerja dengan baik. 1) Pengujian Sensor Tetesan Infus
Untuk pengujian dilakukan dengan cara memberi sekat kertas diantara photodioda dan LED-IR dan diukur tegangannya dan didapatkan data sebagai berikut :
Gambar 18. Ilustrasi pengujian sensor tetesan infus
• Saat disekat tegangan output sensor = 4,7V • Saat tidak disekat tegangan output sensor = 1,73V Dari data yang didapatkan menunjukan bahwa sensor tersebut dapat berkerja dengan baik.
2) Pengujian Pengkondisi Sinyal
Terdapat dua rangkaian pengkondisi sinyal sensor yaitu rangkaian komparator dan rangkaian anti-bouncing .
a) Rangkaian Komparator
Pengujian pertama dilakukan tanpa menghubungkan komparator dengan Vout sensor, dan diukur tegangan Vout komparator pada Rref berbeda dengan Vref 4,7 dan didapatkan data sebagai berikut :
TABEL I
NILAI VOUT KOMPARATOR
No R referensi Tegangan keluaran
1 3,6 Kohm 0,45 V 2 10,55 Kohm 0,476 V 3 20,6 Kohm 3,32 V 4 30,04 Kohm 3,32 V 5 50,6 Kohm 3,31 V
Pengujian kedua dilakukan dengan memberi komparator tegangan masukan dari Vout sensor dan dicarai nilai Rref yang ideal untuk menghasilkan logika high dan low dan didapatkan data sebagai berikut:
• Rref = 12, 39 Kohm • Vref = 4,7 V (catu daya)
• Vin saat mendeteksi = 4,8 V • Vin tidak mendeteksi = 1,73 • Vout saat mendeteksi = 3,4 V • Vout tidak mendeteksi = 0, 16 V
Dari data Vout komparator menunjukan komparator dapat berkerjan dengan baik yaitu jika Vin>Vref = Vout High dan jika Vin<Vref = Vout Low.
b) Rangkaian Anti-bouncing
Pengujian rangkaian anti bouncing ini dilakukan dengan mengukur tegangan keluaranya, dan didapatkan data sebagai berikut:
• Vout rangkaian anti-bouncing saat tidak terhubung dengan output dari komparator = 0,21 V
• Vout rangkaian anti-bouncing saat terhubung dengan output komparator = 4,04 V
• Vout saat mendeteksi = 0,12
• Vout saat tidak mendeteksi = 4,7 V
Dari data yang didapat menunjukan bahwa rangkaian anti-bouncing ini memang sebuah rangkaian inverting schmitt trigger yang memiliki dua voltage treshold.
B. Pengujian Perangkat Lunak
1) Pemilihan kontrol Proposional Derivatif
Pemilihan jenis kontrol tidak akan lepas dari pemodelan dari suatu sistem, pada pengontrol tetesan cairan infus ini pemodelan sistem akan digunakan sebagai patokan untuk menentukan untuk memilih jenis kontrol yang digunakan.
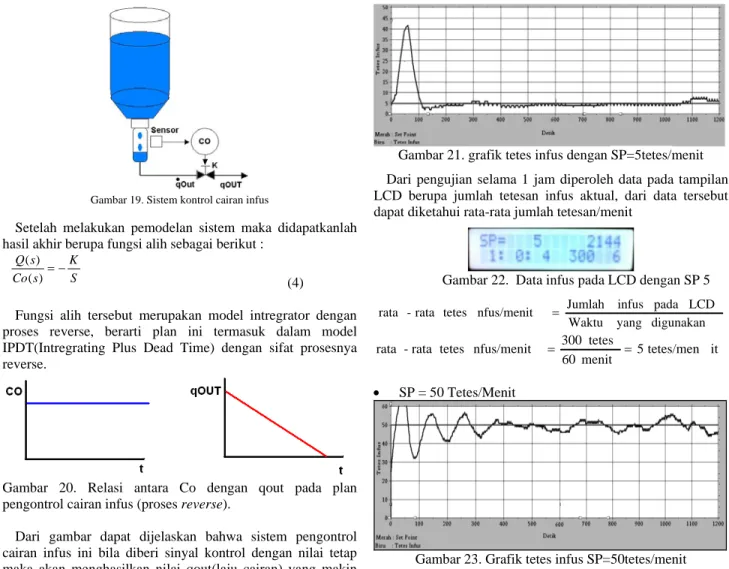
Gambar 19. Sistem kontrol cairan infus
Setelah melakukan pemodelan sistem maka didapatkanlah hasil akhir berupa fungsi alih sebagai berikut :
S K s Co s Q =− ) ( ) ( (4)
Fungsi alih tersebut merupakan model intregrator dengan proses reverse, berarti plan ini termasuk dalam model IPDT(Intregrating Plus Dead Time) dengan sifat prosesnya reverse.
Gambar 20. Relasi antara Co dengan qout pada plan pengontrol cairan infus (proses reverse).
Dari gambar dapat dijelaskan bahwa sistem pengontrol cairan infus ini bila diberi sinyal kontrol dengan nilai tetap maka akan menghasilkan nilai qout(laju cairan) yang makin lama makin menurun lajunya ditandai dengan berkurangnya jumlah tetes infus.
Model IPDT fluida biasanya dapat dikontrol dengan kontrol P atau PD. Pada pengujianya didapatkan hasil yang lebih baik ketika menggunakan kontrol PD dibanding kontrol P saja, Sehingga pengontrolan cairan infus digunakan kontrol PD. 2) Pengujian Kontrol Proposional dan Derivatif
Setelah melakukan uji coba maka didapatkan setting dengan nilai KP = 0,03 dan KD = 1 dengan menggunakan nilai inilah pengontrolan infus akan di-setting. Pada makalah hanya akan dibahas dua pengujian yaitu dengan set point 5 tetes/menit dan 50 tetes/menit
• SP = 5 Tetes/Menit
Pada pengujian 5 tetes/menit dapat dilihat pada gambar 21 tetesan infus cendrung stabil dalam waktu yang lama, hal ini dikarenakan laju aliran infus yang sangat lambat yang yang mengakibatkan terjadinya perubahan ketinggian dari cairan infus tidak terjadi dalam waktu yang cepat sehingga jumlah tetesan infus cendrung stabil dalam waktu yang lama.
Gambar 21. grafik tetes infus dengan SP=5tetes/menit Dari pengujian selama 1 jam diperoleh data pada tampilan LCD berupa jumlah tetesan infus aktual, dari data tersebut dapat diketahui rata-rata jumlah tetesan/menit
Gambar 22. Data infus pada LCD dengan SP 5
digunakan yang Waktu LCD pada infus Jumlah nfus/menit tetes rata -rata = it tetes/men 5 menit 60 tetes 300 nfus/menit tetes rata -rata = = • SP = 50 Tetes/Menit
Gambar 23. Grafik tetes infus SP=50tetes/menit Pada pengujian 50 tetes/menit dapat dilihat pada gambar tetesan infus cendrung tidak stabil dalam waktu yang lama, ini dikarenakan perubahan ketinggian dari cairan infus terjadi dalam waktu yang cepat sehingga grafik cendrung berosilasi .
Gambar 24. Data infus pada LCD dengan SP 50 tetes/menit Dari data pada LCD maka dapat diketahui
it tetes/men 50,32 menit 61 3070tetes nfus/menit tetes rata -rata = =
3) Pengujian Aplikasi Monitoring kondisi Infus Pasien Pada Komputer
Pada aplikasi ditampilkan data berupa sisa infus, data sisa infus ini penting karena menginformasikan kepada petugas medik untuk mengganti infus bila telah habis. Untuk mengetahui kepresisian data sisa infus, maka dilakukan dengan membandingkan pengukur berat infus dengan data yang tertampil pada aplikasi monitoring.
TABEL II
PERBANDINGAN DATA BERAT INFUS
Keterangan : Diketahui 1 ml infus = 1,02 gram Berat bersih = berat pada timbangan – berat botol Konversi
Dari pengujian error yang terjadi berkisar 1-4 ml, ini mungkin disebabkan penggunaan timbangan berat biasa yang kurang akurat tetapi data yang tertampil pada aplikasi masih layak untuk menginformasikan sisa infus yang sebenarnya.
V. PENUTUP A. Kesimpulan
Berdasarkan hasil perancangan, analisis dan pengujian pada ditarik kesimpulan sebagai berikut :
• Kontrol proposional derivatif dapat menghasilkan pengontrolan yang baik adalah dengan nilai KP 0,03 dan KD 1.
• Pengaruh yang terjadi bila memperbesar nilai KP lebih dari 0,03 akan menyebabkan pergerakan membuka dan menutup pengontrol cairan infus menjadi cepat dan sebaliknya bila terlalu kecil dari 0,03 pengontrol cairan infus menjadi sangat lambat.
• Pengaruh yang terjadi bila memperbesar nilai KD lebih dari 1 akan menghasilkan error yang steady pada titik tertentu yang jauh dari nilai set point, Sedangkan bila terlalu kecil dari 1 akan membuat sulitnya grafik tetesan untuk stabil dan terjadi banyak osilasi.
• Semakin besar nilai set point tetes infus/menit yang digunakan maka perubahan ketinggian cairan infus akan cepat mengalami perubahan dan perubahan ketinggian yang cepat akan berpengaruh pada jumlah tetesan cairan infus.
• Set point infus/menit memiliki range dari 1 tetes/menit – 50 tetes/menit, dari pengujian tanpa umpan balik didapatkan bahwa tetesan dengan range 1 tetes/menit – 15 tetes/menit akan lebih lama stabil dibandingkan range 16 tetes/menit – 50 tetes/menit. B. Saran
Sebagai masukan guna pengembangan lebih lanjut dari tugas akhir ini, maka penulis memberikan beberapa saran sebagai berikut :
•
Untuk dapat membandingkan keunggulan metode pengontrolan tetesan infus/menit ini dapat dilakukan dengan menggunakan plan yang sama tetapi dengan metode kontrol yang berbeda seperti pengontrolan dengan menggunakan metode fuzzy.•
Penggunaan sensor tambahan yang dapat mendeteksi ketinggian cairan infus pada botol infus akan memberikan informasi yang lebih akurat mengenai kondisi cairan infus aktual pada botol untuk pusat monitoring.•
Untuk menambah tingkat keamanan penggunaan dari sistem monitoring cairan infus ini dapat dilakukan dengan menambahkan sensor yang dapat mendeteksi gelembung udara pada selang infus .•
Pada satu bangsal biasanya terdapat banyak pasien sehingga dapat dikembangkan dengan membuat banyak pengontrol cairan infus tetapi hanya menggunakan satu pasang Rf YS1020UB saja.•
Monitoring juga dapat dikembangkan dengan mengkombinasikan monitoring kondisi pasien yang lain seperti panas tubuh dan detak jantung pasien.DAFTAR PUSTAKA
[1] Bejo, Agus, C&AVR Rahasia Kemudahan Bahasa C dalam
Mikrokontroler ATMega8535. Penerbit Graha Ilmu,
Yogyakarta 2008.
[2] Kusyati, Eni, Ketrampilan dan Prosedur Laboratorium Keperawatan
Dasar. Penerbit Buku Kedokteran EGC, Jakarta 2006.
[3] Ogata, Katsuhiko, Teknik Kontrol Automatik Jilid 1, Diterjemahkan Oleh Ir. Edi Leksono, Penerbit Erlangga, Jakarta, 1994. [4] Oppenheim, Alan V. , Willsky, Alan S, Sinyal dan Sistem, edisi ke 2 ,
Penerbit Erlangga, Jakarta 2000.
[5] Setiawan, Iwan, Kontrol PID untuk Proses Industri, Elex Media Komputindo, Jakarta, 2008
[6] Wardhana L, Belajar Sendiri Mikrokontroler AVR Seri ATMega8535
Simulasi, Hardware, dan Aplikasi, Penerbit Andi,
Yogyakarta, 2006.
[7] ---, ATmega 8535 Data Sheet, http://www.atmel.com, Januari 2010.
[8] ---, Code Vision AVR Data Sheet, http://www.hpinfotech.com, Maret 2011.
[9] ---, 74HC/HCT14 Hex inverting schmitt trigger Data Sheet, http://www.alldatasheet.com,Oktober 2010.
[10] ---, LM339 Data Sheet, http://www.alldatasheet.com,Oktober 2010.
[11] ---, Quad Single Supply Comparators Data Sheet,
http://www.alldatasheet.com,Oktober 2010.
BIODATA MAHASISWA Abdy Muslim (L2F 309 012)
Saat ini sedang melanjutkan studi pendidikan strata I di Jurusan Teknik Elektro, Fakultas Teknik Universitas Diponegoro Konsentrasi Kontrol.
Mengetahui dan mengesahkan, Dosen Pembimbing I Iwan Setiawan, ST, MT NIP.197309262000121001 Tanggal:____________ Dosen Pembimbing II Budi Setiyono, ST, MT NIP.197005212000121001 Tanggal: ___________ No Pada Aplikasi Berar bersih konversi
1 464 ml 470 gram 460, 78 ml
2 378 ml 385 gram 377,45 ml
3 254 ml 260 gram 254,9 ml