S FIS 1005284 Chapter3
Teks penuh
Gambar






Garis besar
Dokumen terkait
RANCANG BANGUN SCANNER 3D MENGGUNAKAN SENSOR ULTRASONIK DENGAN TAMPILAN REALTIME BERBASIS MIKROKONTROLER.. Universitas Pendidikan Indonesia | repository.upi.edu
kerja dari sistem penghilang embun dan bekas air hujan otomatis untuk AllSky.. Camera ini terdiri dari beberapa tahapan
motor pada remaja akan diukur dengan menggunakan instrumen yang... dibuat oleh peneliti berdasarkan dua jenis motivasi
Konsep yang digunakan adalah menggunakan dua buah rangkaian sensor yang berfungsi sebagai acuan mulai dan berhentinya penghitungan waktu, dengan jarak antara sensor yang
Robot dilengkapi dengan empat buah motor DC sebagai penggerak roda, tiga buah motor servo sebagai penggerak lengan, satu buah sensor ultrasonik sebagai pendeteksi barang dan
Pada perancangan ini, pengujian yang dilakukan mencakup pengujian dari sistem kendali dari sensor ultrasonik, motor stepper, motor DC, dan rangkaian sistem kendali.. Dari
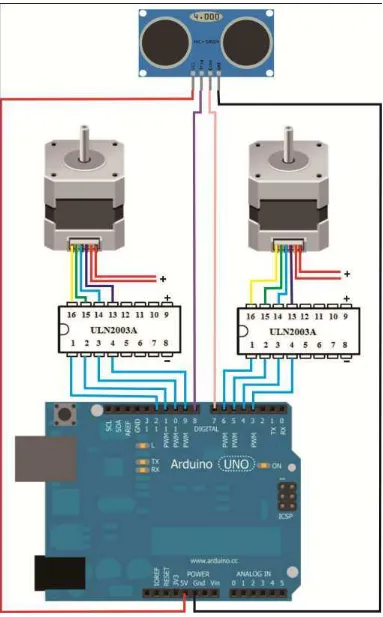
Pada alat ini ultrasonik digunakan sebagai pendeteksi jarak/tinggi pengguna dan apabila jarak yang ditentukan terdeteksi motor stepper akan menggerakan stand micro- phone
Berdasarkan data yang didapatkan dari hasil pengujian sensor ultrasonik, motor stepper , motor DC, pengujian alat ukur kaki, serta pengujian aplikasi yang
