i
TUGAS AKHIR
IDENTIFIKASI BUTA MIMO PADA KANAL
RAYLEIGH FADING
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh :
THERESIA PRIMA PERMATASARI NIM : 065114006
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
ii
FINAL PROJECT
MIMO BLIND IDENTIFICATION OF RAYLEIGH
FADING CHANNEL
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
THERESIA PRIMA PERMATASARI NIM : 065114006
ELECTRICAL ENGINEERING STUDY PROGRAM
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
vi
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP
MOTTO :
Selalu ada jalan un
tuk menggapai mimpi…………
Hidup membutuhkan kesabaran untuk memetik hasil, kejelian memilih tempat untuk merubah nasib hidup dan daya tahan yang tangguh untuk sampai pada apa
yang diimpikan
Kupersembahkan skripsi ini kepada :
Tuhan Yesus Kristus dan Bunda Maria,
(Alm)Bapakku tersayang,
Ibuku tersayang,
Kakakku Florentina Ika Wahyuningsih dan Falentina Dewi Dwisiswanti,
Yustinus Atmadya Gilang Pramana,
viii
INTISARI
Dalam sistem komunikasi, tanggapan frekuensi kanal yang tidak diketahui sama sekali dengan bandwidth yang terbatas dapat menyebabkan terjadinya Intersymbol Interferences (ISI). Respon kanal perlu untuk diidentifikasi secara buta untuk mengurangi ISI yang terjadi tanpa diketahui adanya informasi mengenai data input.
Sistem identifikasi buta (Blind Identification System) merupakan suatu sistem untuk dapat mengidentifikasi sistem kerja dan juga untuk mengidentifikasi input yang diasumsikan tidak diketahui. Metode identifikasi buta yang akan digunakan adalah metode identifikasi buta two input two output (TITO).
Hasil pengidentifikasian secara buta mampu menunjukkan kinerja sistem MIMO dan juga memperoleh hasil identifikasi buta pada kanal output 1 dan kanal output 2. Identifikasi buta pada kanal output 1 mendekati sama dengan input yang diasumsikan tidak diketahui, namun pada kanal output 2 hasil yang diperoleh berbanding terbalik dengan input yang diasumsikan tidak diketahui.
ix
ABSTRACT
In a communication system, channel frequency response is not know at all with limited bandwidth can cause Intersymbol Interferences (ISI). Respons channels need to be identified blindly to reduce ISI is know to occur without information about the input data.
Blind identification system is a sustem to identify the work system and to identify the unknow input is assumed. Blind identification methods to be used is the method of blind identification of two input two output.
The blind identification of MIMO system is able to show the performance and also obtain results on blind identification channel output 1 and channel output 2. Blind identification on channel output 1 is approxiamately equal to the assumed output unknow, but on channel output 2 results obtained is inversely to the input assumed unknow
x
KATA PENGANTAR
Puji syukur dan terima kasih kepada Tuhan Yesus Kristus atas segala karunia-Nya sehingga tugas akhir dengan judul “ Identifikasi Buta MIMO Pada Kanal Rayleigh Fading ” ini dapat diselesaikan dengan baik.
Penelitian yang berupa tugas akhir ini merupakan salah satu syarat bagi mahasiswa Program Studi Teknik Elektro untuk memperoleh gelar Sarjana Teknik di Universitas Sanata Dharma Yogyakarta. Selama menulis tugas akhir ini, penulis menyadari bahwa ada begitu banyak pihak yang telah memberikan bantuan dengan caranya masing-masing, sehingga tugas akhir ini bisa diselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih kepada:
1. Bapak Yosef Agung Cahyanta, S.T., M.T. selaku Dekan Fakultas Sains dan Teknologi Universitas Sanata Dharma Yogyakarta.
2. Bapak Damar Widjaja, S.T., M.T., selaku Dosen Pembimbing yang telah banyak meluangkan waktu untuk memberikan bimbingan, pengetahuan, diskusi, arahan, kritik, dan saran kepada peneliti sehingga penulisan tugas akhir ini dapat diselesaikan.
3. Ibu Theresia Prima Ari, S.T.,M.T., selaku Dosen Pembimbing Akademik yang telah banyak membantu selama ini.
4. Bapak dan Ibu Dosen yang telah memberikan semangat, pengetahuan dan bimbingan kepada peneliti selama kuliah.
5. Laboran Teknik Elektro yang telah banyak membantu selama ini. 6. (Alm) Bapakku yang menjagaku walaupun tidak terlihat.
7. Ibuku, pahlawan dalam hidupku yang tak henti-hentinya memberikan doa dan selalu menguatkanku.
8. Kakakku Florentina Ika Wahyuningsih dan Falentina Dewi Dwisiswanti yang selalu memberikan doa dan semangat.
9. Yustinus Atmadya Gilang Pramana yang telah memberikan arti dan tujuan hidup, semangat dan doa.
10.Teman-teman Teknik Elektro angkatan 2006 untuk kebersamaan dan dukungannya. 11.Teman-teman dan Pemilik Kos Wisma Surya yang telah memberikan kekeluargaan
xii
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN PERSETUJUAN ... iii
HALAMAN PENGESAHAN ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN DAN MOTTO HIDUP ... vi
LEMBAR PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xv
DAFTAR TABEL ... xvii
BAB I: PENDAHULUAN 1.1. Latar Belakang ... 1
1.2. Tujuan dan Manfaat Penelitian... 2
1.3. Batasan Masalah ... 2
1.4. Metodologi Penelitian ... 2
1.5. Sistematika Penulisan ... 3
BAB II: DASAR TEORI 2.1. Fading ... 5
2.1.1.Large Scale Fading ... 6
2.1.2. Small Scale Fading... 7
2.1.2.1. Penyebaran Waktu Tunda (Time Delay Spread)... 7
2.1.2.2. Doppler Spread... 8
2.2. Kanal Rayleigh fading ... 9
2.2.1. Model Pembangkit Kanal Rayleigh fading ... 10
2.3. Additive White Gaussian Noise (AWGN) ... 12
2.4. Modulasi ... 14
2.5. Sistem Modulasi Quadrature Phase Shift Keying ... 14
xiii
2.5.2. Demodulator Quadrature Phase Shift Keying ... 17
2.6. Multiple Output Multiple Input ... 18
2.6.1. Pemodelan Sistem MIMO Menggunakan Metode STBC……….. 20
2.6.2. Orthogonalitas STBC Untuk Sistem Estimasi Kanal……….. 21
2.6.3. Decoder STBC……… 21
2.7. Sistem Identifikasi Buta Two Input Two Output ... .22
2.7.1. Kondisi Identifikasi Buta... 23
BAB III: RANCANGAN PENELITIAN 3.1. Model Sistem ... 26
3.2. Proses... 26
3.2.1. Perancangan Diagram Alir Proses MIMO ... 27
3.2.1.1. Subroutine Antena Pengirim ... 27
3.2.1.1.1 Subroutine Penggunaan Kode Alamouti...28
3.2.1.2 Subroutine Pembangkit Kanal Rayleigh ... 29
3.2.1.3. Subroutine Antena Penerima ... 30
3.2.1.3.1 Subroutine Estimasi Kanal...30
3.3. Proses Identifikasi Buta ... 31
3.3.1. Perancangan Diagram Alir Proses Identifikasi Buta ... 32
3.3.1.1 Subroutine Identifikasi Buta Kanal Output 1 ... 32
3.3.1.2 Subroutine Identifikasi Buta Kanal Output 2 ... 33
BAB IV: HASIL DAN PEMBAHASAN 4.1. Cara Kerja Sistem ... 35
4.2. Pengujian Sistem Kerja Pada Proses Awal ... 35
4.2.1. Program Utama...35
4.2.2. Data Input...36
4.2.3. MIMO 2x2 Pada Kanal Rayleigh...37
4.2.3.1. Unjuk Kerja Antena Pengirim MIMO 2x2 Pada Kanal Rayleigh...37
4.3. Pengujian Sistem Kerja Pada Proses Akhir ... 40
4.3.1. Pengujian Sistem Kerja Identifikasi Buta ... 40
4.3.2. Program Akhir...40
4.3.3. Identifikasi Buta Kanal Output 1...41
xiv
4.3.5. Penggabungan Kanal Identifikasi Buta...43 4.4. Validasi Hasil Identifikasi Buta ... .46
BAB V: KESIMPULAN DAN SARAN
5.1. Kesimpulan ... 48 5.2. Saran ... 48
DAFTAR PUSTAKA ... 49
xv
DAFTAR GAMBAR
Halaman
Gambar 1.1. Pemodelan Sistem ... 3
Gambar 2.1. Karakteristik Kanal Flat Fading ... 7
Gambar 2.2. Karakteristik Frequency Selective Fading... 8
Gambar 2.3. Perbandingan large scale fading dan small scale fading ... 9
Gambar 2.4. Pembangkit Kanal Rayleigh Menggunakan model ... 11
Gambar 2.5. Rayleigh Sebagai Fungsi Waktu ... 11
Gambar 2.6. Fungsi Kerapatan Probabilitas Rayleigh ... 12
Gambar 2.7. Pemodelan Kanal AWGN... 13
Gambar 2.8. Fungsi Kerapatan Probabilitas Gaussian dengan σ=1 ... 13
Gambar 2.9. Diagram Blok Modulasi ... 14
Gambar 2.10.Bandwidth Sinyal QPSK... 15
Gambar 2.11.Blok Diagram Modulator QPSK ... 15
Gambar 2.12.Diagram Konstelasi Dari Sinyal QPSK ... 17
Gambar 2.13.Blok Diagram Demodulator QPSK ... 17
Gambar 2.14. Sistem Kerja MIMO ... 19
Gambar 2.15. MIMO STBC Antena 2x2 ... 20
Gambar 2.16. Model TITO ... 23
Gambar 3.1. Model Sistem ... 26
Gambar 3.2. Proses MIMO... 26
Gambar 3.3. Diagram Alir Proses MIMO Dengan Metode STBC 2x2 ... 27
Gambar 3.4. Diagram Alir Subroutine Antena Pengirim ... 28
Gambar 3.5. Diagram Alir Subroutine Penggunaan Kode Alamaouti ... 29
Gambar 3.6. Penerimaan Sinyal Pada Antena Penerima ... 31
Gambar 3.7. Diagram Alir Subroutine Antena Penerima ... 31
Gambar 3.8. Proses Identifikasi Buta ... 32
Gambar 3.9. Diagram Alir Proses Identifikasi Buta ... 32
Gambar 3.10. Diagram Alir Proses Subroutine Identifikasi Buta Kanal Output 1 ... 33
Gambar 3.11. Diagram Alir Proses Subroutine Identifikasi Buta Kanal Output 2 ... 34
xvi
Gambar 4.2. Panjang Data Input ... 36
Gambar 4.3. Data Biner 1 ... 36
Gambar 4.4. Data Biner 0 ... 37
Gambar 4.5. Serial to Paralel ... 37
Gambar 4.6. Data Ganjil Pada Kanal 1 ... 38
Gambar 4.7. Data Ganjil Pada Kanal 2 ... 38
Gambar 4.8. h11 saat t ... 39
Gambar 4.9. h21 saat t ... 39
Gambar 4.10. h12 saat t + T ... 39
Gambar 4.11. h22 saat t + T ... 39
Gambar 4.12. Perbandingan Antara Kanal Sesungguhnya dan Kanal Hasil Estimasi .... 41
Gambar 4.13. Hasil Identifikasi Buta Kanal Output 1 ... 42
Gambar 4.14. Hasil Identifikasi Buta Kanal Output 2 ... 43
Gambar 4.15. Penggabungan Kanal Output 1 dan Kanal Output 2 1024 bit ... 44
xvii
DAFTAR TABEL
1
BAB I
PENDAHULUAN
1.1
Latar Belakang
Sistem komunikasi bergerak diyakini akan memegang peranan yang semakin penting dalam memenuhi kebutuhan telekomunikasi. Teknologi komunikasi bergerak (mobile communication), terutama yang menggunakan teknologi jaringan wireless berkembang secara cepat. Hal ini disebabkan semakin meningkatnya kebutuhan masyarakat untuk berkomunikasi secara bergerak [1]. Meningkatnya kebutuhan masyarakat dalam berkomunikasi dapat menimbulkan suatu problem yaitu peningkatan permintaan user pada kapasitas kanal yang menggunakan bandwidth terbatas.
Dalam sistem komunikasi, tanggapan frekuensi kanal yang tidak diketahui sama sekali dengan bandwidth yang terbatas dapat menyebabkan terjadinya Intersymbol Interferences (ISI). ISI menyebabkan kesalahan penerjemahan bit dari informasi yang diterima pada sisi penerima. Respon kanal perlu untuk diidentifikasi secara buta untuk mengurangi ISI yang terjadi tanpa diketahui adanya informasi mengenai data input [2].
Sistem identifikasi buta (Blind Identification System) merupakan suatu sistem untuk dapat mengidentifikasi sistem kerja dan juga untuk mengidentifikasi input yang diasumsikan tidak diketahui. Untuk itu diperlukan suatu sistem penerima yang dapat melakukan estimasi terhadap perubahan kanal agar penerima dapat mengetahui perubahan karakteristik kanal tersebut. Hal ini mendorong dilakukannya berbagai penelitian untuk dapat mengestimasi respon kanal secara buta tanpa memboroskan bandwidth kanal yang ada dengan menggunakan multiple element antenna (MEA). Multiple Input Multiple Output (MIMO) merupakan salah satu sistem yang berbasis MEA yang menerapkan sistem array pada sisi pemancar dan sisi penerima umtuk memperoleh efisiensi spektrum tinggi.
suatu proses pengiriman hingga penerimaan, sehingga dapat mengetahui perubahan kanal yang terjadi.
1.2
Tujuan dan Manfaat
Tujuan yang akan dicapai yaitu menganalisa unjuk kerja dari sistem identifikasi buta MIMO pada kanal Rayleigh fading dengan metode yang ada melalui simulasi dengan program komputasi.
Penelitian ini dapat dimanfaatkan untuk referensi dalam sistem penerima komunikasi MIMO, terutama aplikasi pada sistem yang kondisi kanalnya tidak diketahui. Penelitian ini juga bisa digunakan sebagai referensi bagi perencanaan sistem komunikasi wireless 3G/4G berbasis MIMO.
1.3
Batasan Masalah
Dalam tugas akhir ini permasalahan dibatasi sebagai berikut : 1. Model kanal yang dianalisis adalah kanal Rayleigh fading 2. Menggunakan MIMO orde banyak
3. Menggunakan modulasi QPSK (Quadrature Phase Shift Keying)
1.4
Metodologi Penelitian
Metodelogi yang digunakan pada tugas akhir ini adalah: a. Studi Pustaka
Metode ini merupakan sumber utama dalam penulisan penelitian yang sumbernya diperoleh dari jurnal-jurnal, internet, dan handbook untuk mampelajari hal-hal mengenai kanal Rayleigh fading, identifikasi secara buta, dan implementasi simulasi berbasis program komputasi.
b. Pemodelan Sistem
Gambar 1.1 Pemodelan sistem
Data yang dikirimkan akan diproses melalui MIMO yang melewati kanal Rayleigh, kemudian data ouput dari MIMO akan menjadi data input pada proses identifikasi buta
c. Perancangan Algoritma dan Simulasi
Model sistem yang telah diperoleh akan diimplementasikan dan disimulasikan dengan pemograman komputasi.
d. Analisa Data
Proses simulasi yang dilakukan dengan perangkat lunak. Kemudian dilakukan pengujian dan analisa terhadap hasil yang telah didapatkan.
e. Pengambilan Kesimpulan
Membuat kesimpulan dari hasil analisa yang telah dilakukan.
1.5
Sistematika Penulisan
Sistematika penulisan tugas akhir ini adalah sebagai berikut :
BAB I: PENDAHULUAN
Bab ini berisi latar belakang masalah, tujuan dan manfaat, batasan masalah, metodologi penelitian dan sistematika penulisan.
BAB II : DASAR TEORI
Bab ini berisi teori-teori yang mendukung kerja sistem dan teori yang digunakan dalam perancangan.
Data Input
Multiple Input
Rayleigh Fading
Multiple Output
Data Output Identifikasi
BAB III : RANCANGAN PENELITIAN
Bab ini berisi penjelasan alur perancangan sistem MIMO dan identifikasi buta.
BAB IV : HASIL DAN PEMBAHASAN
Bab ini berisi pembahasan program, hasil simulasi , dan pembahasan data yang diperoleh.
BAB V : KESIMPULAN DAN SARAN
Bab ini berisi ringkasan hasil penelitian yang telah dilakukan dan usulan yang berupa ide-ide untuk perbaikan atau pengembangan terhadap penelitian yang telah dilakukan.
5
BAB II
DASAR TEORI
Bab ini membahas teori-teori yang melandasi permasalahan pada tugas akhir ini. Teori dasar yang diberikan meliputi fading, kanal Rayleigh fading, Additive White Gaussian Noise (AWGN), modulasi, sistem modulasi Quadrature Phase Shift Keying (QPSK), Multiple Input Multiple Output (MIMO) dan identifikasi buta (blind identification).
2.1
Fading
Fading merupakan karakteristik utama dalam propagasi radio bergerak. Fading dapat didefinisikan sebagai perubahan fase, polarisasi dan atau level dari suatu sinyal terhadap waktu. Definisi dasar dari fading yang paling umum adalah yang berkaitan dengan mekanisme propagasi yang melibatkan refraksi, refleksi, difraksi, hamburan, dan redaman dari gelombang radio [4]. Kinerja dari suatu sistem komunikasi dapat turun akibat adanya fading. Faktor – faktor yang mempengaruhi fading [5] :
a. Propagasi Multipath
Adanya objek yang menyebabkan pantulan dan hamburan pada saluran mengakibatkan berkurangnya energi sinyal pada amplitudo dan fasa. Efek ini menjadikan sinyal yang diterima pada penerima bervariasi yang mengakibatkan fluktuasi sinyal sehingga terjadi fading dan distrosi. Propagasi multipath juga mengakibatkan perbedaan waktu yang menyebabkan timbulnya intersymbol interference (ISI).
b. Kecepatan Penerima
Gerak relatif antara pengirim dan penerima menghasilkan modulasi frekuensi random berkaitan dengan pergeseran frekuensi Doppler yang berbeda untuk tiap lintasan multipath.
c. Kecepatan Objek Pemantul
d. Bandwidth Sinyal Transmisi
Jika bandwidth sinyal yang ditransmisikan lebih besar dari bandwidth saluran multipath, maka sinyal yang diterima akan mengalami distrosi.
Dalam sistem komunikasi bergerak, perambatan sinyal antara pemancar dan penerima melalui berbagai lintasan yang berbeda. Lintasan yang berbeda-beda tersebut mengakibatkan kuat sinyal penerima menjadi bervariasi. Fenomena ini disebut sebagai multipath atau lintasan jamak. Multipath merupakan hal yang harus dihindari dalam sistem komunikasi wireless karena dapat memberikan kerugian dalam sistem transmisi. Multipath pada kanal radio menyebabkan beberapa hal [6] :
a. Perubahan kekuatan sinyal secara cepat pada jarak tempuh atau interval waktu yang pendek.
b. Frekuensi modulasi yang acak akibat dari Doppler Shift yang bervariasi pada sinyal multipath yang berbeda.
c. Penyebaran waktu (dispersion/echoes) akibat dari delay propagasi pada multipath. Secara umum fading dapat dibedakan menjadi dua yaitu large scale fading dan small scale fading. Large scale fading berkaitan dengan prediksi pathloss, sedangkan small scale fading berkaitan dengan lintasan jamak (multipath) antara pemancar dan penerima. Small scale fading dapat dibedakan berdasarkan penyebaran waktu tunda (time delay spread) dan Doppler Spread.
2.1.1
Large Scale Fading
Large scale fading didefinisikan sebagai rata-rata daya yang hilang akibat transmisi sinyal pada jarak yang jauh, akibat keberadaan obyek-obyek pemantul dan penghalang pada kanal propagasi serta pengaruh kontur bumi. Model ini digunakan untuk memprediksi rata-rata kekuatan sinyal antara pengirim dan penerima. Distribusi large scale fading memilik probability density function (pdf) dari suatu variabel random yang terdistribusi lognormal sebagai berikut [7]
2.1.2
Small Scale Fading
Propagasi sinyal dari pengirim menuju ke penerima dalam lingkungan wireless, akan mengalami berbagai gangguan. Sehingga penerima akan menerima sinyal hasil penjumlahan dari berbagai lintasan akibat mengalami gangguan. Sinyal tersebut akan mengalami variasi amplitude dan fasa yang acak sepanjang periode waktu yang cukup singkat. Sinyal yang diterima penerima adalah sinyal yang telah mengalami distrosi akibat efek kanal atau biasa disebut small scale fading [5]. Small scale fading dapat dibedakan berdasarkan penyebaran waktu tunda (time delay spread) dan Doppler Spread.
2.1.2.1 Penyebaran Waktu Tunda (Time Delay Spread)
a. Flat Fading
Flat fading terjadi jika kanal radio bergerak memiliki gain konstan dan respon fase linier terhadap bandwidth yang lebih besar daripada bandwidth sinyal transmisi [3]. Karakteristik kanal flat fading dapat dilihat pada Gambar 2.1.
Gambar 2.1. Karakteristik kanal flat fading [3]
Amplitude sinyal yang dikirimkan, s(t), bila dilewatkan pada kanal h(τ,t) yang memiliki penguatan yang berubah terhadap waktu, akan berubah menjadi sinyal terima r(t). Namun sinyal r(t) ini memiliki spektrum sinyal transmisi yang tidak berubah, dan ditunjukkan pada Gambar 2.1.
Pada umumnya, distribusi amplitude pada flat fading mengikuti distribusi Rayleigh. Dengan demikian dapat disimpulkan bahwa sinyal yang melalui kanal flat fading mempunyai kriteria sebagai berikut [3]
dengan Ts adalah periode simbol, Bs adalah lebar pita frekuensi sinyal, Bc adalah coherence bandwidth frekuensi kanal dan τs adalah rms ( root mean square ) delay spread.
b. Frequency Selective Fading
Jika kanal memiliki gain konstan dan respon fase linier terhadap bandwidth yang lebih kecil daripada bandwidth sinyal transmisi, maka kanal mengalami frequency selective fading, sehingga respon impulse kanal tiap frekuensi akan berbeda [3]. Karakteristik kanal frequency selective fading dapat dilihat pada Gambar 2.2. Sinyal mengalami frequency selective fading jika [3]
Bs > Bc dan Ts < σs (2.3)
Gambar 2.2. Karakteristik frequency selective fading [3]
2.1.2.2
Doppler Spread
a. Fast Fading
Pada fast fading, respon impulse kanal berubah dengan cepat dalam satu durasi simbol [3]. Hal ini diakibatkan karena coherence time lebih kecil daripada periode simbol sinyal yang ditransmisikan. Hal ini terjadi karena dispersi frekuensi (juga disebut time selective fading) akibat doppler spreading yang pada akhirnya akan menyebabkan distorsi sinyal. Sinyal mengalami fast fading jika [3]
Ts > Tc dan Bs < BD (2.4)
b. Slow Fading
Pada slow fading, laju perubahan respon impuls kanal lebih lambat daripada durasi simbol sinyal yang ditransmisikan. Dalam domain frekuensi, hal ini diakibatkan karena coherence time lebih besar daripada periode simbol sinyal yang ditransmisikan. Sinyal mengalami slow fading jika [3]
Ts << Tc dan Bs >> BD (2.5)
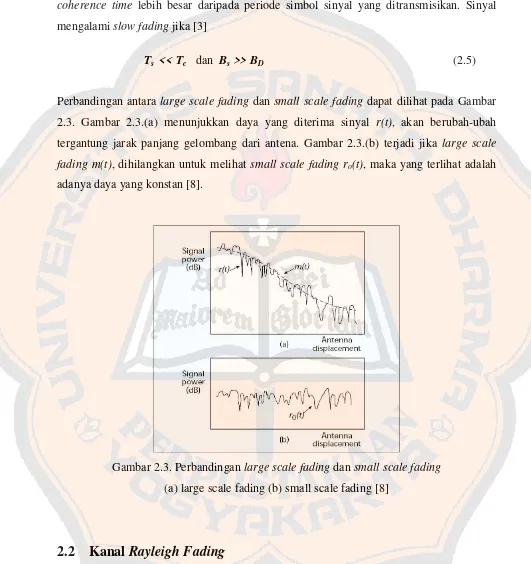
Perbandingan antara large scale fading dan small scale fading dapat dilihat pada Gambar 2.3. Gambar 2.3.(a) menunjukkan daya yang diterima sinyal r(t), akan berubah-ubah tergantung jarak panjang gelombang dari antena. Gambar 2.3.(b) terjadi jika large scale fading m(t), dihilangkan untuk melihat small scale fading ro(t), maka yang terlihat adalah adanya daya yang konstan [8].
Gambar 2.3. Perbandingan large scale fading dan small scale fading (a) large scale fading (b) small scale fading [8]
2.2 Kanal Rayleigh Fading
distribusi Rayleigh disebut Rayleigh fading. Pada rayleigh fading, sinyal datang yang melalui jalur yang berbeda-beda tersebut, memberikan sejumlah energi yang sama terhadap sinyal gabungan yang ada pada penerima. Sinyal yang dipengaruhi Rayleigh fading mempunyai fungsi rapat probabilitas (probability density function – pdf ) seperti yang ditunjukkan dalam persamaan [9] :
(2.6)
dengan r adalah deteksi penuh, σ adalah nilai rms tegangan sinyal sebelum deteksi, dan σ2 daya waktu rata-rata sinyal terima sebelum deteksi.
2.2.1 Model Pembangkit Kanal Rayleigh Fading
Pembangkit untuk kanal Rayleigh menggunakan model Jakes. Gambar 2.4 menunjukkan model Jakes yang digunakan [10]. Berdasarkan model Jakes tersebut, ac dan
as yang merupakan variable acak dengan mean nol dan variansi σ2, ditentukan sebagai
No adalah osilator frekuensi rendah yang frekuensinya sama dengan ωn.
dimana /4 , N1 2(2No 1),
o n
N n
,
) 1 ) 2 / (( 2
1
1
N
No , dan d 2fd
merupakan frekuensi pergeseran Doppler.
Gambar 2.4 Pembangkit kanal Rayleigh menggunakan model Jakes [10]
Gambar 2.5 menunjukkan sebuah sinyal terselubung yang terdisribusi secara Rayleigh sebagai fungsi waktu [11]. Fungsi kerapatan probabilitas Rayleigh dapat dilihat pada Gambar 2.6 [12] .
Gambar 2.6 Fungsi kerapatan probabilitas Rayleigh [12]
2.3 Additive White Gaussian Noise
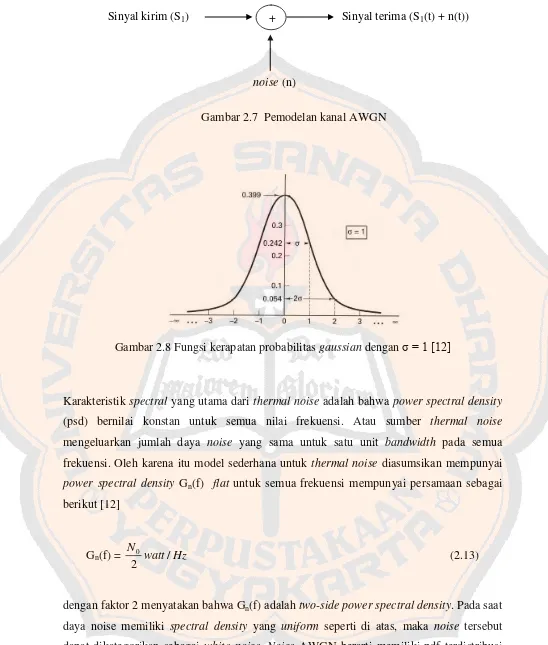
Additive White Gaussian Noise (AWGN) merupakan thermal noise yang terdistribusi normal dengan nilai rata-rata nol, serta bersifat menambahkan level sinyal. Noise pada kanal dapat merusak sinyal, karena sinyal yang diterima pada penerima tidak lagi sama dengan sinyal yang dikirimkan. Model kanal AWGN dapat dilihat pada Gambar 2.7. Sinyal yang diterima dalam selang waktu 0 < t < T, merupakan sinyal yang dikirimkan ditambahkan noise kanal dimana diasumsikan tidak ada redaman pada kanal, maka sinyal dapat dinyatakan dalam persamaan sebagai berikut [12]
r(t) = S1(t) + n(t), 0 < t < T (2.11)
dengan S1 merupakan sinyal yang dikirimkan dan n(t) adalah noise kanal sebagai sebuah
proses acak zero mean gaussian. Secara teoritis noise kanal sering dimodelkan dengan distribusi gaussian dengan rata-rata (mean) sama dengan nol dan dikarakteristikan secara statistik dengan fungsi rapat probability density function (pdf) sebagai berikut [12]
p(r) =
Gambar 2.7 Pemodelan kanal AWGN
Gambar 2.8 Fungsi kerapatan probabilitas gaussian dengan σ = 1 [12]
Karakteristik spectral yang utama dari thermal noise adalah bahwa power spectral density (psd) bernilai konstan untuk semua nilai frekuensi. Atau sumber thermal noise mengeluarkan jumlah daya noise yang sama untuk satu unit bandwidth pada semua frekuensi. Oleh karena itu model sederhana untuk thermal noise diasumsikan mempunyai power spectral density Gn(f) flat untuk semua frekuensi mempunyai persamaan sebagai
berikut [12]
Gn(f) = watt Hz N
/ 2
0 (2.13)
dengan faktor 2 menyatakan bahwa Gn(f) adalah two-side power spectral density. Pada saat
daya noise memiliki spectral density yang uniform seperti di atas, maka noise tersebut dapat dikategorikan sebagai white noise. Noise AWGN berarti memiliki pdf terdistribusi gaussian dan psd konstan untuk semua frekuensi.
Sinyal kirim (S1) + Sinyal terima (S1(t) + n(t))
2.4 Modulasi
Modulasi adalah proses untuk mengubah sinyal baseband menjadi sinyal bandpass [13]. Diagram blok teknik modulasi dapat dilihat pada Gambar 2.9. Pada proses modulasi terdapat modulator dan demodulator. Pada model modulasi baseband, modulator bertugas untuk memodulasi pulsa digital. Sedangkan demodulator bertindak sebagai detektor.
Gambar 2.9 Diagram blok dari modulasi [13]
Pada sistem komunikasi biner, data biner terdiri dari deretan bit „0‟ dan „1‟. Kedua data tersebut ditransmisikan dalam dua bentuk gelombang sinyal s0(t) untuk digit „0‟ dan s1(t)
untuk digit „1‟. Demodulator sinyal yang terdapat pada sisi penerima bertugas memproses sinyal yang telah rusak karena proses di kanal.
2.5 Sistem Modulasi Quadrature Phase Shift Keying
Modulasi digital merupakan proses penumpangan sinyal digital (bit stream) ke dalam sinyal carrier. Phase Shift Keying (PSK) merupakan salah satu teknik modulasi digital, dimana sinyal informasi digital yang dikirimkan ditumpangkan pada fasa sari sinyal pembawa [14].
Modulasi sinyal digital multilevel, dalam prosesnya akan menyebabkan terjadinya simbolisasi kelompok-kelompok bit (dibit, tribit,…) sehingga bit stream data disimbolkan dalam kelompok n- bit, maka akan diperlukan 2n simbol untuk merepresentasikannya. Selanjutnya simbol-simbol tersebut akan memodulasi kelakuan sinyal pembawa (amplitudo, frekuensi, fasa, atau kombinasinya) tujuannya adalah untuk menghemat penggunaan bandwidth.
Pada modulasi QPSK sinyal pembawa merepresentasikan empat keadaan fasa untuk menyatakan empat simbol. Satu simbol QPSK terdiri dari dua bit (dibit) yaitu „00‟, „01‟, „10‟, „11‟. Setiap dua bit akan mengalami perubahan fasa sebesar 900
kecepatan bit informasinya sebesar dua kali kecepatan simbolnya. pada modulasi QPSK, besarnya m=2 (2m =4) sehingga bandwidth yang dibutuhkan untuk perubahan fasa setiap detik dapat dilihat pada Gambar 2.10.
Gambar 2.10 Bandwidth sinyal QPSK [14]
2.5.1 Modulator Quadrature Phase Shift Keying
Blok diagram modulator QPSK dapat dilihat pada Gambar 2.11. Gambar 2.11 menunjukkan data awal masukkan diproses oleh bit splitter sehingga dihasilkan dua buah aliran data yang terdiri dari aliran data ganjil ( In Phase ) dan aliran data genap (Quadrature).
Gambar 2.11 Blok diagram modulator QPSK [14]
Kemudian masing-masing aliran data akan memodulasi sinyal carrier yang beda fasa antara keduanya sebesar π/2. Sinyal carrier untuk data ganjil memilik persamaan cos 2πfct, sedangkan sinyal carrier untuk data genap memiliki persamaan sin 2πfct. perkalian
aliran data ganjil. Sedangkan sinyal BPSK-Q akan dihasilkan dari perkalian sinyal carrier sin 2πfct dengan aliran data genap. Persamaan matematisnya sebagai berikut [14]
SBPSK-Q(t) = dQ(t) sin ωct = V sin (ωct + ϕ) (2.14)
Sinyal QPSK didapatkan dengan menjumlahkan antara sinyal BPSK-I dengan sinyal BPSK-Q pada blok adder. Diagram konstelasi dari sinyal QPSK dapat dilihat pada Gambar 2.12. Secara umum persamaan sinyal QPSK sebagai berikut [14]
SQPSK(t)=
dimana Es adalah energy persimbol modulasi, Ts adalah durasi simbol modulasi.
Gambar 2.12 Diagram konstelasi dari sinyal QPSK [14]
2.5.2 Demodulator Quadrature Phase Shift Keying
Prose pengembalian data yang dikirim transmitter dimulai dari diterimanya sinyal oleh antena receiver dapat dilihat pada Gambar 2.13. Persamaan matematis dari sinyal tersebut sebagai berikut [14]
S’(t)=Si(t).cos (2πfct + ϕ)+Sq(t).sin (2πfct) (2.19)
Gambar 2.13 Blok diagram demodulator QPSK [14]
penerimaan diproses melalui carrier recovery. Dari hasil perkalian tersebut akan didapatkan pada lengan in phase sinyal, dengan persamaan sebagai berikut [14]
i(t)=s’(t)QPSK .c(t)= . ( ).cos
2 (2 ) (2 )
sedangkan pada lengan quadrature persamaan sinyalnya sebagai berikut [14]
q(t)= s’(t)QPSK .c(t)= . ( ).sin
2 (2 ) (2 )
dengan tujuan untuk meredam komponen frekuensi tinggi dari sinyal tersebut sehingga pada kedua lengan tersebut hanya tersisa komponen frekuensi rendahnya saja. Sehinga persamaan sinyal pada lengan in phase menjadi [14]si’(t)= . ( )
sedangkan persamaan sinyal pada lengan quadrature menjadi [14]
sq’(t)= . ( )
Persamaan–persamaan tersebut selanjutnya akan disampling per periode simbol untuk kemudian dibandingkan dengan level tegangan referensi tertentu.
2.6 Mutiple Input Multiple Output
saling menggagalkan. MIMO juga memiliki kelemahan, yaitu adanya waktu interval yang menyebabkan adanya sedikit delay pada antena yang akan mengirimkan sinyal, meskipun pengiriman sinyalnya sendiri lebih cepat. Waktu interval ini terjadi karena adanya proses dimana sistem harus membagi sinyal mengikuti jumlah antena yang dimiliki oleh perangkat MIMO yang jumlahnya lebih dari satu [15]. Sistem kerja MIMO dapat dilihat pada Gambar 2.14.
Gambar 2.14 Sistem kerja MIMO [16]
Kapasitas kanal akan meningkat jika antena array digunakan baik pada sisi pemancar dan sisi penerima dan memiliki lingkungan propagasi yang memberikan scattering yang cukup. Jika fading pada link antara pasangan – pasangan antena pengirim dan penerima adalah i.i.d (independent identical distribution), maka kapasitas kanal rata-rata dari sistem yang menggunakan N antena pada kedua sisi, baik pemancar maupun penerima, akan menjadi N kali lebih besar daripada sistem antena tunggal dengan bandwidth dan daya pancaran total yang sama [2]. Persyaratan untuk mendapatkan kapasitas kanal yang tinggi antara lain
a. Antena array yang digunakan harus memiliki jarak antena elemen yang tepat.
b. Lingkungan propagasi antara pemancar dan penerima memberikan lintasan propagasi yang banyak (multipath).
fading. Sedangkan SM digunakan untuk perbaikan performansi dalam kondisi efisiensi spektral yang cukup signifikan. Pada sistem MIMO yang akan disimulasikan diterapkan metode transmisi Space Time Block Code.
2.6.1 Pemodelan Sistem MIMO Menggunakan Metode Space Time Block
Coding
Space time coding merupakan sistem coding pada domain ruang dan waktu. Space time coding bertujuan untuk mendapatkan diversitas spasial secara maksimal pada kanal MIMO melalui susunan codeword transmit yang tepat.
Space time coding yang akan digunakan yaiut Orthogonal Space Time Block Codes yang diperkenalkan oleh Alamouti. Jika digunakan dua antena Tx dan Rx, maka skema
transmisinya dapat dilihat pada Gambar 2.15 [17].
Gambar 2.15 MIMO STBC antena 2x2 [17]
Sedangkan sinyal yang diterima antena Rx2 pada saat t dan t+T adalah [17] :
2.6.2 Orthogonalitas STBC Untuk Sistem Estimasi Kanal
Teknik estimasi mengharuskan beberapa syarat tertentu, sehingga estimasi kanal MIMO dengan memanfaatkan orthogonalitas STBC ini dapat dilakukan. Syarat tersebut antara lain [17] :
1. Terdapat simbol sebagai pilot pada sebuah frame sinyal kirim yang berfungsi untuk melakukan estimasi kanal dari simbol tersebut.
2. Sifat kanal harus dalam keadaan quasistatic maksudnya keadaan kanal pada beberapa waktu atau beberapa simbol dalam satu frame harus dalam kondisi tetap.
Pada estimasi kanal dengan teknik ini, nilai noise n11,n12,n21,n22 dianggap nol sehingga menyebabkan nilai estimasi kanal belum sempurna. Nilai koefisien kanal
22 21 12 11,h ,h ,h
h dapat dihitung dengan melakukan invers matriks pada persamaan (2.24) dan (2.25) serta menganggap nilai noise n11,n12,n21,n22 sama dengan nol. Pada kondisi sebenarnya sinyal yang diterima mengandung noise n11,n12,n21,n22 kondisi ini menjadi penyebab mengapa estimasi dengan teknik ini tidak sempurna atau ideal. Walaupun kanal memiliki sifat quasistatic namun hasil estimasi kanal tidak akan pernah bisa sama dengan koefisien kanal yang sebenarnya yang sebenarnya akibat noise kanal tersebut.
2.6.3 Decoder STBC
Dengan nilai h11,h12,h21,h22 hasil estimasi kanal diketahui, maka dapat ditentukan nilai sˆ0 dan sˆ1 dengan menggunakan skema Alamouti seperti pada Gambar 2.15. blok combiner pada Gambar 2.15 menghasilkan dua sinyal berikut, yang akan dikirimkan ke detector maximum likehood [17]:
Dengan mensubstitusikan persamaan (2.24) dan (2.25) ke persamaan (2.26) dan (2.27), maka akan diperoleh persamaan (2.28) dan (2.29) berikut ini [17] :
0 pengambilan keputusan untuk sinyal PSK didasarkan pada Euclidean distance antara sinyal S~0 dan semua kemungkinan simbol yang dikirimkan. Keputusan simbol yang dikirim ditentukan oleh maximum likehood detector. Aturan pengambilan keputusan yang digunakan adalah sebagai berikut [17] :
1. Penentuan si sebagai „estimasi simbol s0‟ (sˆ0) yang dikirimkan, jika dan hanya jika
dimana d(A,B) merupakan euclidean distance antara sinyal A dan sinyal B, dan indeks i menyatakan seluruh batasan nilai yang mungkin dari sinyal yang ditransmisikan. 2. Penetuan si sebagai „estimasi simbol s1‟ (sˆ1) yang dikirimkan, jika dan hanya jika
2.7
Sistem Identifikasi Buta Two Input Two Output (TITO)
Kita asumsikan bahwa setiap saluran filter hij(k) memiliki panjang Lh, dimana kemungkinan beberapa kanal filter mungkin sama dengan nol, sehingga beberapa filter memiliki panjang lebih pendek. Persamaannya dapat ditulis ulang dalam bentuk matriks mulai dari [18]
Masalah identifikasi buta terdiri dari menemukan filter yang tidak diketahui pencampurannya hij(k), mengingat x(k) adalah urutan penggambaran dari kanal, dan mengetahui s(k) sumber yang tidak diketahui. Gambar 2.16 menunjukkan pemodelan TITO.
Gambar 2.16 Model TITO [18]
2.7.1
Kondisi Identifikasi
Masalah yang didefinisikan seperti penjelasan di atas adalah bentuk dan mengenal model yang ada, dengan analisa mengambil panjang N-DFT ( N > Lh) dikedua sisi [18]
H(w) tidak bisa diidentifikasikan, kecuali ada dalam struktur. Jika kita mengalikan sinyal ith si(w) dengan faktor rasional qi(w), dan membagi kolom ith H(w) dengan qi(w) yang sama, vektor x(k) yang dihasilkan akan sama. Dengan menggunakan asumsi bahwa [18]
1. Diagonal H(w) sebesar 1: Hii(w)=1. i=1,….,n. (2.33)
Dalam masalah TITO tertentu, sinyal pengamatan x1, x2 dihasilkan oleh sistem yang ditunjukkan pada Gambar 2.16. ini menyatakan bahwa penerima ith langsung diterima sumber tanpa distrosi.
2. Sumber tidak diketahui
j mengasumsikan struktur tertentu tentang matrik kovarians kecuali diagonal kovarians silang s1 dan s2 adalah nol .
4. Kanal silang H12(w), H21(w) adalah linier.
Asumsikan 1 sampai 3 diatas cukup umum dalam arti bahwa setiap sistem TITO, bahkan salah satu sumbernya berkorelasi dapat diubah menjadi sistem yang memenuhi kondisi. Sistem TITO secara umum sebagai berikut [18]
)
Dalam bentuk matriks
kovarians asli adalah
adalah hetermian tetapi (secara umum) tidak diagonal. Untuk kondisi 2 diterjemahkan menjadi
untuk setiap sistem yang diberikan input yang ditunjukkan pada persamaan 2.38 sampai 2.41 membentuk suatu sistem persamaan homogen meliputi empat yang tidak diketahui G11, G12, G21, G22.
Kondisi 3 secara umum juga benar, jika statistik input tidak memiliki relasi dengan sistem matriks H, dapat disimpulkan bahwa setiap sistem TITO bisa diubah menjadi suatu yang memenuhi kondisi 1sampai kondisi 3 dengan pemilihan G(w) yang tepat.
26
BAB III
RANCANGAN PENELITIAN
Bab ini akan membahas proses kerja sistem, perencanaan dan pembuatan perangkat lunak.
3.1 Model Sistem
Model sistem yang digunakan pada tugas akhir ini diperlihatkan pada Gambar 3.1. Data yang dikirimkan akan diproses pada sistem MIMO dengan dua buah antena pengirim (Tx) dan dua buah antena penerima (Rx). Sinyal dari pengirim merambat melalui kanal transmisi menuju penerima. Pada penerima, sinyal yang diterima dapat terdiri dari sinyal utama atau sinyal yang diinginkan dan sinyal multipath yang merupakan sinyal interferensi. Hasil dari sinyal yang diterima akan diproses pada metode identifikasi buta untuk mengetahui perubahan kanal yang terjadi.
Gambar 3.1 Model sistem
3.2 Proses MIMO
Pada proses MIMO, metode yang digunakan adalah metode space time block code (STBC) dengan menggunakan antena 2x2. Gambar 3.2 menunjukkan proses MIMO.
Gambar 3.2 Proses MIMO
3.2.1 Perancangan Diagram Alir Proses MIMO
Perancangan diagram alir proses MIMO dengan metode space time block code (STBC) dengan menggunakan antena 2x2 ditunjukkan pada Gambar 3.3. Data input yang digunakan diasumsikan tidak diketahui sama sekali, yang akan diproses pada bagian pengiriman. Sinyal yang dikirimkan akan melalui kanal Rayleigh menuju bagian penerima.
Gambar 3.3 Diagram alir proses MIMO dengan metode STBC 2x2
3.2.1.1 Subroutine Antena Pengirim
Subroutine antena pengirim berfungsi untuk memproses bagian - bagian pada antena pengirim dengan menggunakan metode yang telah ditentukan. Pada Gambar 3.4 ditunjukkan diagram alir subroutine antena pengirim. Proses yang dilakukan pada antena pengirim sebagai berikut
a. Penyisipan Bit Pilot
Pola penyisipan bit pilot yang akan digunakan saat proses estimasi kanal diatur sehingga memiliki pola.
Mulai
Data Input
Antena Pengirim
Kanal Rayleigh
Antena Penerima
Data Output
b. Serial to Parallel Converter
Data masukan yang ada akan diubah menjadi dua buah aliran paralel. c. Signal Mapper
Signal mapper yang akan disimulasikan adalah QPSK. Data yang masuk ke modulator akan dikelompokan menjadi simbol - simbol yang tiap simbolnya terdiri dari 2 buah bit. Sehingga terdapat empat level sinyal yang merepresentasikan 4 buah kode biner, yaitu „00‟, „01‟, „11‟, dan „10‟.
d. Penggunaan Kode Alamouti
Setelah dilakukan modulasi kedua buah simbol yang datang secara paralel, akan ditransmisikan pada dua buah antena yang berbeda secara bersamaan.
e. Pembangkitan Kanal Rayleigh
Gambar 3.4 Diagram alir subroutine antena pengirim
3.2.1.1.1 Subroutine Penggunaan Kode Alamouti
Subroutine penggunaan kode Alamouti berfungsi untuk proses pengiriman pada saat t dan pada saat t+T sesuai dengan kode Alamouti yang digunakan. Antena Tx1 akan
Mulai
Data Input
Penyisipan bit pilot
Signal mapper Serial to Parallel Converter
Penggunaan Kode Alamouti
Pembangkitan Kanal Rayleigh
mengirimkan sinyal yang berasal dari S0 saat dalam kondisi t. Sedangkan antena Tx2 akan
mengirimkan sinyal yang berasal dari S1 saat kondisi t+T. Untuk kondisi t+T , pada antena
Tx1 akan mentransmisikan simbol S1 yang telah mengalami proses konjugasi dan diberi
muatan negative. Sedangkan untuk Tx2, akan mentransmisikan simbol S0 yang juga telah
melalui proses konjugasi.
Gambar 3.5 Diagram alir subroutine penggunaan kode Alamouti
3.2.1.2 Subroutine Pembangkitan Kanal Rayleigh
Subroutine pembangkitan kanal Rayleigh berfungsi sebagai kanal transmisi dari pengirim menuju ke penerima. Pembangkit untuk kanal Rayleigh menggunakan model Jakes seperti yang dijelaskan pada persamaan 2.7 sampai dengan persamaan 2.10 yang terdapat pada dasar teori. Untuk nilai kecepatan user (v) km/jam, kecepatan cahaya dan frekuensi pembawa saat simulasi ditentukan, agar memudahkan dalam pembuatan fungsi program.
Mulai
Transmisi saat kondisi t
Maka :
Tx1 S0
Tx2 S1
Transmisi kondisi saat t+T
Maka :
Tx1 - S1*
Tx2 S0*
Ya
Tidak
Selesai A
A
3.2.1.3 Subroutine Antena Penerima
Subroutine bagian penerima, sinyal yang ditransmisikan selanjutnya diterima oleh antena untuk diproses seperti yang ditunjukkan pada Gambar 3.6. Sedangkan Gambar 3.7 menunjukkan diagram alir subroutine antena penerima. Sedangkan proses yang dilakukan pada antena penerima sebagai berikut
a. Estimasi Kanal
Estimasi kanal dilakukan untuk mengetahui respon kanal yang terjadi selama sinyal yang ditransmisikan dari pengirim ke penerima.
b. Signal Combiner
Setelah dilakukan estimasi kanal, akan dikombinasikan untuk mendapatkan data yang sesuai dengan data yang terkirim.
0 ~
S = h11*. y11+ h12. y12* + h21*.y21+ h22.y22* 1
~
S = h12*. y11- h11.y12* + h22*.y21- h21.y22* c. Signal Demapper
Simbol - simbol yang telah diterima kemudian dipisahkan antara bagian In Phase dan Quadrature.
d. Parallel to Serial Converter
Simbol - simbol yang telah diubah menjadi data biner kemudian disatukan menjadi sebuah aliran data serial kembali.
3.2.1.3.1 Subroutine Estimasi Kanal
Gambar 3.6 Penerimaan sinyal pada antena penerima
Gambar 3.7 Diagram alir subroutine antena penerima
3.3 Proses Identifikasi Buta (Blind Identification)
Pada proses identifikasi buta, metode yang digunakan adalah metode two input two output (TITO). Gambar 3.8 menunjukkan proses identifikasi buta. Prose identifikasi buta yang akan dilakukan bertujuan untuk mengidentifikasi sistem kerja dan juga untuk mengidentifikasi input yang diasumsikan tidak diketahui.
A
Estimasi kanal
Signal combiner
Signal demapper
Perhitungan banyak bit eror
Perhitungan BER per Eb/No
Selesai Parallel to Serial Converter
Semua Eb/No selesai?
Ya
Gambar 3.8 Proses identifikasi buta
3.3.1 Perancangan Diagram Alir Proses Identifikasi Buta
Perancangan diagram alir proses identifikasi buta dengan menggunakan metode two input two output (TITO) ditunjukkan pada Gambar 3.9. Data input yang digunakan pada proses identifikasi merupakan data input yang berasal dari hasil output pada sistem MIMO.
Gambar 3.9 Diagram alir proses identifikasi buta
3.3.1.1 Subroutine Identifikasi Buta Kanal Output 1
Subroutine identifikasi buta kanal output 1, merupakan proses dimana akan dilakukan identifikasi untuk melihat kinerja dari proses MIMO dan juga mengidentifikasi pada kanal output 1. Gambar 3.10 menunjukkan proses subroutine identifikasi buta kanal 1. Proses identifikasi buta pada kanal output 1, dimulai dengan pengambilan data dari hasil output MIMO. Data yang diperoleh akan melalui proses filter yaitu dimana data 0 dan 1 akan dipisahkan. Kemudian akan dilakukan estimasi kanal, y1 dan h12. Untuk memperoleh
hasil identifikasi buta kanal output 1, digunakan rumus seperti yang terlihat pada lampiran halaman 30.
Data input Identifikasi Buta Data output
Mulai
Data Input
Identifikasi Buta Kanal output 1 dan kanal output 2
Gambar 3.10 menunjukkan proses subroutine identifikasi buta kanal output 1
3.3.1.2. Subroutine Identifikasi Buta Kanal Output 2
Sedangkan subroutine identifikasi buta kanal output 2, merupakan proses dimana akan dilakukan identifikasi untuk melihat kinerja dari proses MIMO dan juga mengidentifikasi pada kanal output 2. Gambar 3.11 menunjukkan proses subroutine identifikasi buta kanal 2. Proses identifikasi buta pada kanal output 2, dimulai dengan pengambilan data dari hasil output MIMO. Data yang diperoleh akan melalui proses filter yaitu dimana data 0 dan 1 akan dipisahkan. Kemudian akan dilakukan estimasi kanal, y1
dan h12. Untuk memperoleh hasil identifikasi buta kanal output 2, digunakan rumus seperti
yang terlihat pada lampiran halaman 30.
Mulai
Gambar 3.11 menunjukkan proses subroutine identifikasi buta kanal output 2.
Mulai
Data Input dari data output proses
MIMO
Filter
Prewhitening
Estimasi y2 dan h21
Invers y2 Y2
h21 G2
Output kanal 2
Selesai
)
*
(
1
*
2 1
2 2 1 2
G
G
Y
G
Y
S
35
BAB IV
HASIL DAN PEMBAHASAN
Suatu program dapat dikatakan bekerja dengan baik apabila telah dilakukan pembuktian terhadap sistem kerja program tersebut. Bab ini akan menjelaskan mengenai cara pengujian dari program yang dikerjakan dan pembahasan hasil simulasi yang diperoleh.
8.1
Cara Kerja Sistem
Cara kerja sistem dibagi menjadi dua bagian, yaitu proses awal dan proses akhir, yang akan dilakukan untuk mengetahui cara kerja sistem yang telah dilakukan. Proses awal adalah pengujian sistem kerja MIMO pada antena pengirim dengan kanal Rayleigh sebagai kanal transmisi. Sedangkan proses akhir dari sistem yang telah dirancang adalah pengujian sistem kerja identifikasi buta pada antena penerima. Gambar 4.1 menunjukkan proses awal dan proses akhir yang akan dilakukan.
Gambar 4.1 Proses awal dan proses akhir
8.2
Pengujian Sistem Kerja Pada Proses Awal
8.2.1
Program Utama
Program utama berfungsi sebagai program awal untuk menjalankan program yang akan disimulasikan. Program utama akan menampilkan metode transmisi dan pemodelan kanal yang akan digunakan. Untuk menjalankan program utama, pada command window program komputasi dituliskan
>> program_utama
Data
Input
Multiple
Input Rayleigh fading
Multiple Output
Identifikasi Buta
Data
Output
Setelah itu program utama akan melakukan proses awal, yaitu pengujian sistem kerja MIMO pada antena pengirim seperti yang ditunjukkan pada Gambar 4.1.
8.2.2
Data Input
Data input yang digunakan pada proses ini merupakan data biner 0 dan 1 dengan panjang data 1024 bit. Tetapi data input diasumsikan tidak diketahui sama sekali. Gambar 4.2 menunjukkan panjang data input. Gambar 4.3 dan Gambar 4.4 menunjukkan data biner 1 dan data biner 0.
Gambar 4.2 Panjang data input
Gambar 4.4 Data biner 0
8.2.3
MIMO 2X2 pada Kanal Rayleigh
Proses yang terjadi pada MIMO 2x2 pada kanal Rayleigh merupakan proses utama untuk mengetahui kinerja MIMO 2x2. MIMO dengan jumlah antena pengirim dan antena penerima yang sama akan memudahkan pengiriman data maupun penerimaan data yang diperoleh.
8.2.3.1
Unjuk Kerja Antena Pengirim MIMO 2X2 Pada Kanal
Rayleigh
Data input terlebih dahulu akan diproses pada bagian pengirim. Data sepanjang 1024 akan diubah menjadi dua buah aliran paralel. Bit rate yang dihasilkan oleh proses serial to parallel menjadi setengah dari bit rate awal. Bit rate yang dikirimkan oleh tiap antena 512 bit. Gambar 4.5 menunjukkan serial to parallel yang terjadi pada blok serial to parallel seperti yang terlihat pada Gambar 3.4.
Gambar 4.5 Serial to parallel
1042
Kanal 1 512
Kanal 1 menunjukkan kumpulan data - data ganjil yang telah melalui proses bit pilot seperti yang ditunjukkan pada Gambar 4.6. Sedangkan untuk kumpulan data – data genap yang juga telah melalui proses bit pilot pada kanal 2 ditunjukan pada Gambar 4.7. Setiap data serial yang telah diubah menjadi paralel akan dimodulasi (signal mapping). Teknik mapping yang digunakan yaitu Quadrature Phase Shift Keying (QPSK). Fungsi program untuk signal mapping dapat dilihat pada lampiran halaman L8.
Gambar 4.6 Data ganjil pada kanal 1
Gambar 4.7 Data genap pada kanal 2
Sesuai dengan persamaan (2.9) fungsi program untuk model Jakes dapat dilihat pada lampiran halaman L9.
Dari fungsi model Jakes yang ada, dapat diperoleh respon kanal antara Tx1 dan Rx1 (h11), Tx1 dan Rx2 (h12), Tx2 dan Rx1 (h21), serta Tx2 dan Rx2 (h22). Sinyal yang dikirimkan saat kondisi t tanpa adanya delay dan kondisi t+T saat adanya delay, dengan menggunakan kode Alamouti, maka hasil yang diperoleh
a. Sinyal S0 yang dikirim dari h11 saat t, ditunjukkan pada Gambar 4.8.
b. Sinyal S1 yang dikirim dari h21 saat t, ditunjukkan pada Gambar 4.9.
c. Sinyal yang telah melalui proses konjugasi dan diberi muatan negatif, yang dikirim dari h12 saat t+T, ditunjukkan pada Gambar 4.10.
d. Sinyal yang telah melalui proses konjugasi yang dikirim dari h22 saat t+T,
ditunjukkan pada Gambar 4.11.
Gambar 4.8 h11 saat t Gambar 4.9 h21 saat t
Gambar 4.8 dan Gambar 4.9 menunjukkan sinyal yang dikirimkan tanpa adanya delay (penundaan waktu), sedangkan Gambar 4.10 dan Gambar 4.11 menunjukkan sinyal yang dikirimkan dengan adanya delay.
8.3
Pengujian Sistem Kerja Pada Proses Akhir
8.3.1
Pengujian Sistem Kerja Identifikasi Buta
Diperlukan suatu metode untuk mengidentifikasi unjuk kerja sebuah sistem dan juga untuk mengetahui suatu sistem yang tidak diketahui data inputnya dan hanya tersedia data outputnya. Metode identifikasi buta yang digunakan adalah metode identifikasi buta two input two output (TITO). Metode ini akan digunakan untuk melihat unjuk kerja sistem MIMO dan juga mengidentifikasi sistem MIMO pada kanal Rayleigh dengan asumsi data input tidak diketahui.
8.3.2
Program Akhir
Program akhir berfungsi untuk menjalankan proses identifikasi buta yang akan disimulasikan. Input dari program akhir merupakan data yang yang diterima dari kanal ouput 1 dan kanal output 2 pada antena pengirim. Program akhir merupakan program yang akan mengidentifikasi kinerja dari sistem MIMO dan juga untuk mengetahui sistem tersebut dengan asumsi data input tidak diketahui. Untuk menjalankan program akhir, pada command window program komputasi dituliskan
>> program_akhir
Setelah menjalankan program akhir, hasil simulasi yang diperoleh adalah perbandingan antara kanal sesungguhnya dan kanal hasil estimasi. Kanal sesungguhnya merupakan kanal yang diberi input dari hasil sistem pengiriman yang telah dilakukan. Sedangkan kanal hasil estimasi merupakan kanal yang diterima dengan menggunakan metode TITO. Gambar 4.12 menunjukkan hasil perbandingan antara kanal yang sesungguhnya dan kanal hasil estimasi. Dari hasil perbandingan yang diperoleh terlihat bahwa kanal hasil estimasi berbeda jauh dengan kanal yang sesungguhnya, hal ini dikarenakan pengaruh noise saat transmisi tiap kanal output.
Gambar 4.12 Perbandingan antara kanal yang sesungguhnya dan kanal hasil estimasi
8.3.3
Identifikasi Buta Kanal Output 1
Untuk mengidentifikasi kanal output 1, maka pada command window program komputasi dituliskan
>> kanal1
Kanal output 1 dapat diidentifikasi dengan menggunakan rumus seperti dibawah yang diperoleh dari hasil yang dapat dilihat pada lampiran halaman L33.
) * ( 1
* 2 1
1 1 2 1
G G
Y G Y S
(4.1)
dengan S1 adalah hasil identifikasi buta pada kanal output 1, Y2 adalah input yang
diperoleh dari kanal output 1 pada antena pengirim, Y1 adalah input yang diperoleh dari
kanal output 2 pada antena pengirim, G1 adalah hasil estimasi yang terjadi pada h12, dan G2
Gambar 4.13 Hasil identifikasi buta kanal output 1
Pada kanal output 1, hasil identifikasi buta yang diperoleh tidak sesuai dengan data input yang dikirimkan seperti yang ditunjukkan pada Gambar 4.6. Hal ini dikarenakan respon kanal yang diberikan antena pengirim tidak sesuai dengan respon kanal pada metode identifikasi buta yang digunakan. Sehingga hasil identifikasi buta kanal output 1 dengan menggunakan metode TITO tidak dapat bekerja dengan baik.
8.3.4
Identifikasi Buta Kanal Output 2
Untuk mengidentifikasi kanal output 1, maka pada command window program komputasi dituliskan
>> kanal2
Untuk identifikasi buta dari kanal output 2, dapat diidentifikasi dengan menggunakan rumus dibawah yang diperoleh dari hasil yang dapat dilihat pada lampiran halaman L33.
)
kanal output 2 pada antena pengirim, G1 adalah hasil estimasi yang terjadi pada h12, dan G2
identifikasi buta kanal output 2. Fungsi program untuk identifikasi buta kanal output 2 dapat dilihat pada lampiran halaman L29.
Gambar 4.14 Hasil identifikasi buta kanal output 2
Pada kanal output 2, hasil identifikasi buta yang diperoleh tidak sesuai dengan data input yang dikirimkan seperti yang ditunjukkan pada Gambar 4.7. Hal ini dikarenakan respon kanal yang diberikan antena pengirim tidak sesuai dengan respon kanal pada metode identifikasi buta yang digunakan. Sehingga hasil identifikasi buta kanal output 2 dengan menggunakan metode TITO tidak dapat bekerja dengan baik.
8.3.5
Penggabungan Kanal Identifikasi Buta
Untuk menggabungkan kanal output 1 dan kanal output 2 dengan panjang data 1024 bit, maka pada command window program komputasi dituliskan
>> gabung
Fungsi program untuk menggabungkan kanal output 1 dan kanal output 2 dengan panjang data 1024 bit dapat dilihat pada lampiran halaman L30. Gambar 4.15 menunjukkan hasil penggabungan kanal output 1 dan kanal output 2 dengan panjang data 1024.
Gambar 4.15 Penggabungan kanal output 1 dan kanal output 2 dengan panjang data 1024
Hasil penggabungan kanal identifikasi buta menunjukkan data yang dapat diidentifikasi mengalami pertambahan panjang data menjadi 1100 bit karena adanya pengaruh noise yang besar serta penggunaan metode identifikasi buta yang tidak dapat merespon tiap kanal penggabungan. Sehingga nilai BER (Bit Error Rate) yang diperoleh saat penggabungan kanal relatif sama untuk setiap SNR yang diberikan yaitu ± 0.5. Nilai BER yang diperoleh ditunjukkan pada Tabel 4.1.
Tabel 4.1 Nilai BER
SNR BER
1 0.5827
2 0.6982
3 0.5345
4 0.5573
5 0.5482
6 0.5264
7 0.5027
8 0.5564
9 0.5109
10 0.5082
Dari hasil BER yang diperoleh saat percobaan, maka unjuk kerja dari identifikasi buta dengan menggunakan metode TITO memperoleh hasil yang buruk.
Untuk menggabungkan kanal output 1 dan kanal output 2 dengan panjang data lebih dari 1024 bit, maka pada command window program komputasi dituliskan
>> gabung1
Gambar 4.16 menunjukkan hasil penggabungan kanal output 1 dan kanal output 2 dengan panjang data lebih dari 1024. Data yang diberikan 1200 bit.
Gambar 4.16 Penggabungan kanal output 1 dan kanal output 2 dengan panjang data 1200
Hasil penggabungan kanal identifikasi buta dengan menggunakan data 1200 bit, tidak dapat mengidentifikasi dengan baik. Sehingga nilai BER (Bit Error Rate) yang diperoleh saat penggabungan kanal, memiliki nilai yang relatif sama untuk setiap SNR yang diberikan yaitu ± 0.5. Nilai BER yang diperoleh ditunjukkan pada Tabel 4.2.
Tabel 4.2 Nilai BER
SNR BER
1 0.5833
2 0.5450
3 0.5725
4 0.5225
5 0.5458
Tabel 4.2 (Lanjutan) Nilai BER
SNR BER
7 0.5192
8 0.5583
9 0.5100
10 0.5100
11 0.5033
Dari hasil BER yang diperoleh saat percobaan, maka unjuk kerja dari identifikasi buta menggunakan metode TITO dengan panjang data yang berbeda memperoleh hasil yang buruk.
4.4 Validasi Hasil Identifikasi Buta
Identifikasi buta berguna untuk mengetahui data input yang diasumsikan tidak diketahui ketika melewati proses MIMO, menjadi bisa diketahui karakter dari input yang melalui proses MIMO sebelumnya. Dengan bantuan metode TITO, maka identifikasi buta dapat dibandingkan dengan hasil input diasumsikan tidak diketahui ditunjukkan pada Tabel 4.3.
Tabel 4.3 Perbandingan antara data input dan hasil identifikasi
Data Input Hasil Identifikasi Buta
Tabel 4.3 (Lanjutan) Perbandingan antara data input dan hasil identifikasi
Data Input Hasil Identifikasi Buta
Kanal 2
Penggabungan Kanal Untuk Data 1024 bit
Penggabungan Kanal Untuk Data 1200 bit
48
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Kesimpulan yang dapat diambil dari identifikasi buta MIMO pada kanal Rayleigh fading adalah :
1. Hasil identifikasi buta yang diperoleh pada kanal output 1 dan kanal output 2 tidak dapat diidentifikasi dengan baik menggunakan metode TITO.
2. Metode TITO tidak dapat diterapkan pada identifikasi buta MIMO pada kanal Rayleigh fading, karena memperoleh hasil identifikasi buta yang buruk.
3. Untuk panjang data 1024 bit dan panjang data lebih dari 1024 bit, identifikasi buta dengan menggunakan metode TITO tidak dapat diidentifikasi dengan baik.
5.2 Saran
Saran-saran bagi pengembangan aplikasi ini selanjutnya:
49
DAFTAR PUSTAKA
[1]. Rianto, Yan, “IMT-2000: Komunikasi di Mana Saja, Kapan Saja”, Elektro Indonesia, No.21, Mei/Juni 1998.
[2]. Dewi, Falentina, Identifikasi Buta Pada Kanal FIR MIMO Dengan Dekorelasi Subkanal, ITS,2007.
[3]. Effendi, Rustam, Limited Feedback Precoding dan MIMO Spasial Multiplexing Untuk Aplikasi 802.16e, STT Telkom, 2007.
[4]. Ismail, Nasrudin, Kanal Rayleigh Fading Pada Komunikasi CDMA, Elektro Indonesia, Edisi 12, Maret 1998.
[5]. Prasetia, Agustana, Reduksi PAPR Pada Sinyal OFDM Dengan Selective Mapping Menggunakan Turbo Coding, STT Telkom, 2008.
[6]. ___________, Sistem Komunikasi Bergerak Propagasi Small Scale Fading 1, STT Telkom, 2008.
[7]. ___________, Sistem Komunikasi Bergerak Propagasi Large Scale Fading, STT Telkom, 2008.
[8]. Sklar, Bernard, Rayleigh Fading Channels In Mobile Digital Communication Systems Part I : Characterization, IEEE Comm., Juli 1997.
[9]. Salman, Analisa Performasi Sistem Diversitas Alamouti Menggunakan Teknik Estimasi Kanal, USU, 2009.
[10]. Juliandy, Tonny, Simulasi Teknik Pengkodean Reguler Low Density Parity Check Code Pada Sistem MC-CDMA, USU, 2009.
[11]. Radhe dan Schwarz, Fading Channel Simulation In DVB, 2005. [12]. __________, Teori Penunjang.
[13]. __________, Sistem Komunikasi Seluler, STT Telkom, 2008.
[14]. Syahputra, Dedy, Analisa Kinerja Space Time Block Code Pada Sistem MIMO 2x2 Melalui Kanal Fading Rayleigh, USU, 2009.
[15]. _________, Sistem MIMO, IT Telkom, 2008.
[17]. Budi Prasetya dan Suhartono Tjondronegoro, Kinerja Sistem MIMO – OFDM Dengan Beamforming Pada Kanal Rayleigh, STT Telkom.
L1
Listing Program
Listing Program MIMO
%Program_utama clear all;
bit_stream = 1024; jum_kirim = 5; besar_snr=10;
antenna=input('metode transmisi= MIMO 2 Tx & 2 Rx'); kanal=input('pemodelan kanal = kanal_fading_rayleigh '); tic;
melalui_fading; %pilih_simulasi; waktu_simulasi=toc;
disp (strcat('simulasi memerlukan waktu = ',num2str(waktu_simulasi), 'detik'));
%Pilih_simulasi
%tic; %memulai pengambilan data dengan waktu
%antenna== MIMO 2 Tx & 2 Rx & kanal== kanal_fading_rayleigh; %melalui_fading;
%Melalui Kanal Fading Rayleigh for y=1:jum_kirim;
error_total=zeros(size(1,besar_snr)); data_input;
%data digital % figure(7)
% stem(sinyal_input)
% figure(8)
% stem(sinyal_input_est)
%serial to paralel converter n=length(sinyal_input_est); m=0;
% kanal_1 = zeros(length (sinyal_input_est)/2); % kanal_2 = zeros(length (sinyal_input_est)/2); % for i=1:length(sinyal_input_est);
% if mod(i,2)~=0 % n=n+1;
% kanal_1(n)=sinyal_input_est(i); % else
% m=m+1;
% kanal_2(m)=sinyal_input_est(i); % end
% end
kanal_1 = sinyal_input_est (1:2:n); %ganjil kanal_2 = sinyal_input_est (2:2:n); %genap figure(2)
stem(kanal_1) figure(3) stem(kanal_2)
%Proses modulasi QPSK
analog_s1=signal_mapping(kanal_1); analog_s2=signal_mapping(kanal_2);
%Respon kanal antara tx1 dan rx1 h11=corr_fading(length(analog_s1));
%Respon kanal antara tx2 dan rx1 h12=corr_fading(length(analog_s2));
%Respon kanal antara tx2 dan rx2 h22=corr_fading(length(analog_s2)); for x=0:besar_snr
%transmit sequence encoding
%signal transmit at time t from tx1+fading signal_transmit_from_tx1_t1=(analog_s1);
%signal transmit at time t from tx2+fading signal_transmit_from_tx2_t1=(analog_s2);
%signal transmit at time t+T from tx1+fading
signal_transmit_from_tx1_t2=-1.*(conj(signal_transmit_from_tx2_t1));
%signal transmit at time t+T from tx2+fading
signal_transmit_from_tx2_t2=conj(signal_transmit_from_tx1_t1);
%signal received at time t

![Gambar 2.1. Karakteristik kanal flat fading [3]](https://thumb-ap.123doks.com/thumbv2/123dok/1712115.2081727/24.595.16.574.125.741/gambar-karakteristik-kanal-flat-fading.webp)
![Gambar 2.4 Pembangkit kanal Rayleigh menggunakan model Jakes [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1712115.2081727/28.595.23.574.54.743/gambar-pembangkit-kanal-rayleigh-menggunakan-model-jakes.webp)
![Gambar 2.6 Fungsi kerapatan probabilitas Rayleigh [12]](https://thumb-ap.123doks.com/thumbv2/123dok/1712115.2081727/29.595.16.569.63.699/gambar-fungsi-kerapatan-probabilitas-rayleigh.webp)
![Gambar 2.9 Diagram blok dari modulasi [13]](https://thumb-ap.123doks.com/thumbv2/123dok/1712115.2081727/31.595.25.575.170.719/gambar-diagram-blok-dari-modulasi.webp)
![Gambar 2.10 Bandwidth sinyal QPSK [14]](https://thumb-ap.123doks.com/thumbv2/123dok/1712115.2081727/32.595.19.572.112.688/gambar-bandwidth-sinyal-qpsk.webp)
![Gambar 2.12. Secara umum persamaan sinyal QPSK sebagai berikut [14]](https://thumb-ap.123doks.com/thumbv2/123dok/1712115.2081727/33.595.19.582.101.722/gambar-secara-umum-persamaan-sinyal-qpsk-sebagai-berikut.webp)
