BAB II
MOTOR INDUKSI TIGA FASA 2.1 Umum
Motor induksi merupakan motor arus bolak-balik (AC) yang paling luas digunakan. Penamaannya berasal dari kenyataan bahwa motor ini bekerja berdasarkan induksi medan magnet stator ke statornya, dimana arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif antar putaran rotor dengan medan putar (rotating magnetic field) yang dihasilkan oleh arus stator.
Motor induksi banyak digunakan pada perindustrian karena harganya yang relatif murah, konstruksi yang kuat, sederhana dan mudah pemeliharaannya serta motor induksi mempunyai efisiensi yang tinggi. Akan tetapi jika dibandingkan dengan motor DC, motor induksi masih memiliki kelemahan dalam pengaturan kecepatan. Pada motor induksi pengaturan kecepatan sulit untuk dilakukan karena untuk mengatur kecepatannya, efisiensi dari motor induksi tersebut akan berubah juga, sedangkan pada motor DC hal ini tidak dijumpai.
2.2 Konstruksi Motor Induksi Tiga Fasa
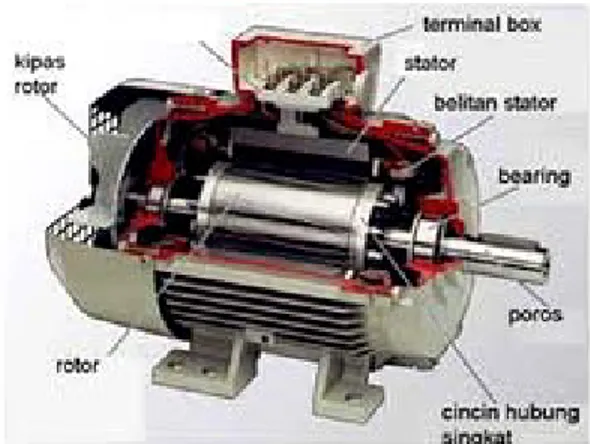
Secara umum konstruksi motor induksi tiga fasa terdiri dari stator dan rotor. Stator merupakan bagian mesin yang tidak berputar dan terletak di bagian luar, sedangkan rotor merupakan bagian dari mesin yang berputar dan terletak di bagian dalam. Konstruksi motor induksi dapat dilihat pada Gambar 2.1.
Gambar 2.1 Konstruksi Motor Induksi Tiga Fasa
2.2.1 Stator
Stator adalah bagian terluar dari motor yang merupakan bagian yang diam dan tempat mengalirkan arus fasa (Gambar 2.2(a)). Stator terdiri atas tumpukan laminasi inti yang memiliki alur yang menjadi tempat kumparan dililitkan yang berbentuk silindris.. Tiap elemen laminasi inti dibentuk dari lembaran besi (Gambar 2.2(b)). Alur pada tumpukan laminasi inti diisolasi dengan kertas (Gambar 2.2(c)). Tiap lembaran besi tersebut memiliki beberapa alur dan beberapa lubang pengikat untuk menyatukan inti. Tiap kumparan tersebar dalam alur yang disebut belitan fasa yang terpisah secara listrik sebesar 1200. Kawat kumparan yang digunakan terbuat dari tembaga yang dilapis dengan isolasi tipis. Kemudian tumpukan inti dan belitan stator diletakkan dalam cangkang silindris (Gambar 2.2(d)). Lempengan laminasi inti, lempengan inti yang telah disatukan, belitan stator yang telah dilekatkan pada cangkang luar untuk motor induksi tiga fasa dapat dilihat pada Gambar 2.2.
a b c d Gambar 2.2 Komponen stator motor induksi tiga fasa:
(a) Stator pada motor induksi, (b) Lempengan inti,
(c) Tumpukan inti dengan kertas isolasi pada beberapa alurnya, (d) Tumpukan inti dan kumparan dalam cangkang stator
2.2.2 Rotor
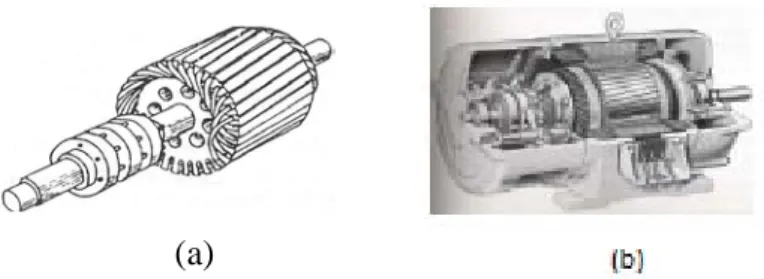
Rotor merupakan bagian dari mesin yang berputar dan terletak di bagian dalam. Rotor motor induksi tiga fasa dapat dibedakan menjadi dua jenis yaitu rotor sangkar (squirrel-cage rotor) dan rotor belitan (wound rotor)
.
Pada motor belitan (motor cincin slip) berbeda dengan motor sangkar tupai dalam hal konstruksinya.Pada rotor sangkar terdiri dari susunan batang konduktor yang dibentangkan ke dalam slot – slot yang terdapat pada permukaan rotor dan tiap – tiap ujungnya dihubung singkat dengan menggunakan cincin aluminium. Batang rotor dan cincin ujung sangkar tupai yang kecil merupakan coran tembaga atau aluminium dalam satu lempeng pada inti rotor, maka batang rotor ini kelihatan seperti kandang tupai sehingga disebut motor induksi rotor sangkar tupai ditunjukkan pada Gambar 2.3.
(a)
Gambar 2.3 (a) Tipikal rotor sangkar, (b) motor induksi rotor sangkar
Pada motor belitan, rotor dililit dengan lilitan terisolasi serupa dengan lilitan stator. Lilitan fasa rotor dihubungkan secara wye dan masing-masing ujung fasa terbuka dikeluarkan ke cincin slip yang terpasang pada poros rotor. Slot rotor menampung belitan terisolasi yang mirip dengan belitan pada stator. Dalam hal ini, sikat karbon menekan cincin slip, oleh karena itu tahanan eksternal dapat dihubungkan seri ke belitan rotor untuk mengontrol torsi start dan kecepatan selama pengasutan. Penambahan tahanan eksternal pada rangkaian rotor belitan menghasilkan torsi yang lebih besar dengan arus pengasutan yang lebih kecil dibanding rotor sangkar. Konstruksi motor induksi tiga fasa rotor belitan ditunjukkan pada Gambar 2.4.
(a)
2.3 Medan Putar
Perputaran rotor pada motor arus bolak – balik terjadi akibat adanya medan putar ( fluks yang berputar ) yang memotong rotor. Medan putar ini terjadi apabila kumparan stator dihubungkan dengan suplai fasa banyak, umumnya tiga fasa. Pada saat terminal tiga fasa motor induksi dihubungkan dengan suplai tiga fasa maka arus bolak – balik tiga fasa ia, ib, ic yang terpisah sebesar 1200 derajat
satu sama lain akan mengalir pada kumparan stator. Arus – arus ini akan menghasilkan gaya gerak magnet yang kemudian menghasilkan fluks yang berputar atau disebut juga medan putar.
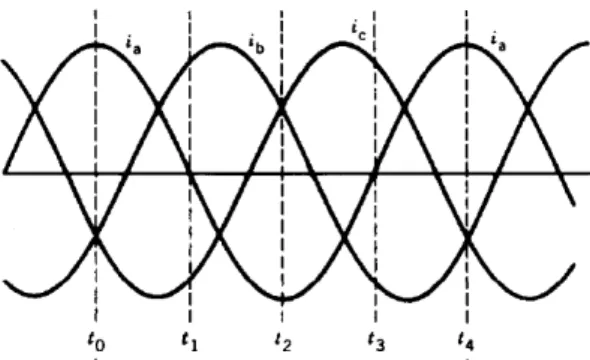
Untuk melihat bagaimana medan putar dihasilkan, maka dapat diambil contoh sebuah motor induksi tiga fasa yang dihubungkan dengan sumber tiga fasa sehingga pada stator mengalir arus tiga fasa yang kemudian menghasilkan medan putar, seperti Gambar 2.5 berikut ini :
Gambar 2.5 Arus tiga fasa yang seimbang
Pada kondisi t0 dan t4 :
ia = Imax Fa = Fmax
ib = Fb = Fmax
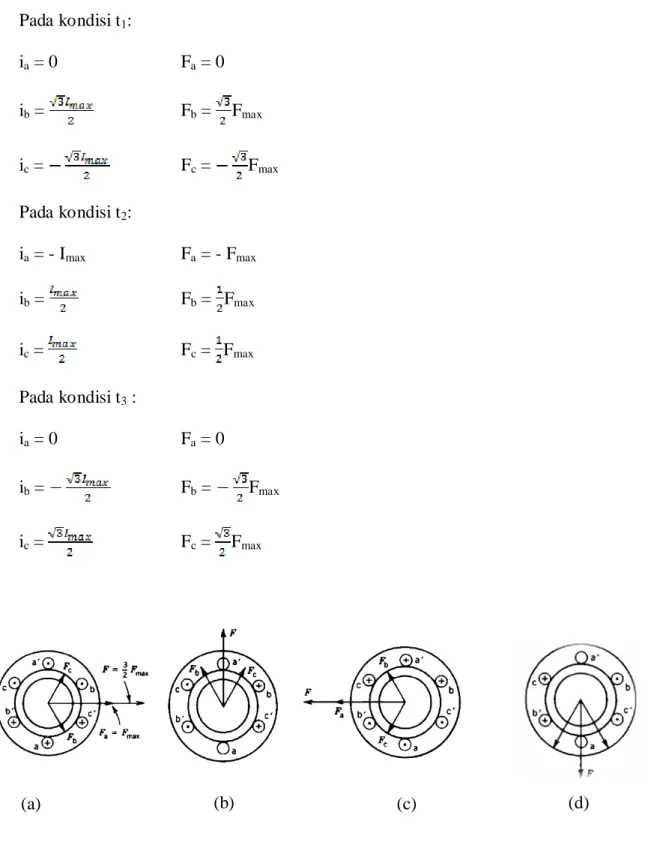
Pada kondisi t1: ia = 0 Fa = 0 ib = Fb = Fmax ic = Fc = Fmax Pada kondisi t2: ia = - Imax Fa = - Fmax ib = Fb = Fmax ic = Fc = Fmax Pada kondisi t3 : ia = 0 Fa = 0 ib = Fb = Fmax ic = Fc = Fmax
Gambar 2.6 Medan putar pada motor induksi tiga fasa pada (a) kondisi t0 dan t4,
(b) kondisi t1, (c) kondisi t2, (d) kondisi t3.
Kecepatan putaran medan putar stator dinamakan kecepatan sinkron, medan putar stator kemudian memotong konduktor pada batang rotor sehingga pada konduktor rotor timbul tegangan induksi yang mengakibatkan rotor ikut berputar setelah melalui beberapa proses. Arah putaran rotor motor induksi searah dengan arah putaran medan putar, namun kecepatan putaran rotor lebih rendah dari kecepatan sinkronnya. Perbedaan kecepatan putaran ini dinamakan slip motor induksi.
2.4 Slip
Motor induksi tidak dapat berputar pada kecepatan sinkron. Jika hal ini terjadi maka rotor tidak akan berputar (diam) relatif terhadap fluksi yang berputar. Maka tidak akan ada ggl yang diinduksikan dalam rotor sehingga tidak ada arus yang mengalir pada rotor dan tidak akan menghasilkan kopel. Apabila rotor dari motor induksi berputar dengan kecepatan nr dan kecepatan medan putar stator
adalah ns maka slip (s) adalah
% 100 x n n n s s r s − = (2.1)
Dalam hal ini kecepatan relatif rotor terhadap kecepatan medan putar stator adalah nrel, dimana nrel = ns – nr. Maka frekuensi yang dibangkitkan pada
belitan rotor adalah f2, di mana P n n f s r 120 2 − = (2.2)
Sedangkan frekuensi medan putar stator adalah f1, di mana
p n
Dari persamaan (2.2) dan persamaan (2.3) di atas diperoleh: s r s n n n f f − = 1 2 , maka 1 2 sf f = (2.4)
Apabila slip = 0 (ns = nr), maka f2 = 0. Apabila rotor ditahan dengan slip=1
(nr = 0), maka f2 = f1. Dari persamaan (2.4), diketahui bahwa frekuensi rotor
dipengaruhi oleh slip. Oleh karena itu, ggl induksi dan reaktansi pada rotor merupakan fungsi frekuensi yang besarnya juga dipengaruhi oleh slip.
2.5 Prinsip Kerja Motor Induksi Tiga Fasa
Motor induksi adalah peralatan pengubah energi listrik ke energi mekanik. Listrik yang diubah merupakan listrik tiga fasa. Arus pada rotor didapat dari arus induksi dimana arus ini berada dalam medan magnetik sehingga akan terjadi gaya (F) pada rotor yang akan menggerakkan rotor dalam arah tegak lurus medan. Untuk memperjelas prinsip kerja motor induksi tiga fasa adalah sebagai berikut: 1. Apabila sumber tegangan tiga fasa dihubungkan ke kumparan stator maka
pada kumparan stator akan mengalir arus tiga fasa.
2. Arus tiga fasa tersebut akan menghasilkan fluksi bolak-balik yang berubah-ubah.
3. Interaksi ketiga fluksi bolak-balik tersebut akan menghasilkan medan putar yang berputar dengan kecepatan putar sinkron ns, dimana
p f
ns =120 (2.5)
4. Fluksi yang berputar tersebut akan memotong batang konduktor pada rotor, akibatnya pada kumparan rotor akan timbul tegangan induksi (ggl) sebesar E2
E2 = 4,44fN2Фm (volt) (2.6)
dimana:
E2 = Tegangan induksi pada rotor saat rotor dalam keadaan diam.
N2 = Jumlah lilitan kumparan rotor. Фm = Fluksi maksimum (Wb).
5. Karena kumparan rotor merupakan rangkaian tertutup, maka ggl akan menghasilkan arus I2.
6. Adanya arus I2 di dalam medan magnet menimbulkan gaya F pada rotor.
7. Bila torka mula yang dihasilkan oleh gaya F pada rotor cukup besar untuk memikul torka beban, rotor akan berputar searah dengan medan putar stator. 8. Perputaran rotor akan semakin meningkat hingga mendekati kecepatan
sinkron dan diperlukan adanya perbedaan relatif antara kecepatan medan putar stator (ns) dengan kecepatan berputar rotor (nr). Perbedaan kecepatan
antara ns dan nr disebut slip dinyatakan pada persamaan (2.1).
9. Pada saat rotor dalam keadaan berputar, besarnya tegangan yang terinduksi pada kumparan rotor tergantung besarnya slip. Tegangan induksi ini dinyatakan dengan E2s yaitu
E2s = 4,44sfN2Фm (volt) (2.7)
dimana:
E2s = Tegangan induksi pada rotor dalam keadaan berputar
N2 = Jumlah lilitan kumparan rotor
f2=sf= frekuensi rotor ( dalam keadaan berputar)
10. Bila nr = ns, tegangan tidak akan terinduksi dan arus tidak mengalir pada
akan timbul apabila nr < ns dan apabila nr > ns maka motor induksi beroperasi
sebagai generator induksi yang akan menghasilkan energi listrik.
2.6 Rangkaian Ekivalen Motor Induksi Tiga Fasa
Pada prinsipnya proses “induksi” yang terjadi pada motor induksi hampir sama seperti pada transformator yang berbeban resistif, sehingga penggambaran rangkaian ekivalen motor induksi berdasarkan rangkaian ekivalen transformator, dimana stator identik dengan sisi primer transformator dan rotor identik dengan sisi sekunder transformator. Perbedaannya, pada kumparan rotor (sekunder) motor induksi terhubung singkat dan berputar. Disamping itu perbedaan yang mendasar antara keduanya adalah transformator merupakan mesin listrik statis, sedangkan motor induksi adalah mesin listrik dinamis.
Rangkaian ekivalen motor induksi untuk masing-masing sisi dapat diperlihatkan seperti berikut ini :
2.6.1 Ditinjau Dari Sisi Rotor
Pada saat motor induksi bergerak nr > 0 dan nr < ns, maka berdasarkan persamaan (2.1) akan terjadi slip (s). Jika kumparan rotor dihubungkan dengan suatu beban, maka pada kumparan rotor akan mengalir arus Ir yang sumbernya
r E .
(
r r)
r r I R X E = . + (2.8)Apabila harga-harga ggl induksi dilihat dari rotor, maka :
a E
E s
r = (2.9)
' r r r s I I E E a= = (2.10)
a : adalah konstanta perbandingan.
Berdasarkan persamaan (2.8) didapat ggl induksi pada bagian rotor yaitu: r r r r r I R I X E = . + . r r r r r sI R sI X E s. = . . + . . r r r r rs sI R sI X E = . . + . . (2.11)
Karena frekuensi rotor maupun frekuensi stator tidak mempengaruhi resistansi rotor, sehingga persamaan (2.11) menjadi :
r r r r rs I R sI X E = . + . . (2.12)
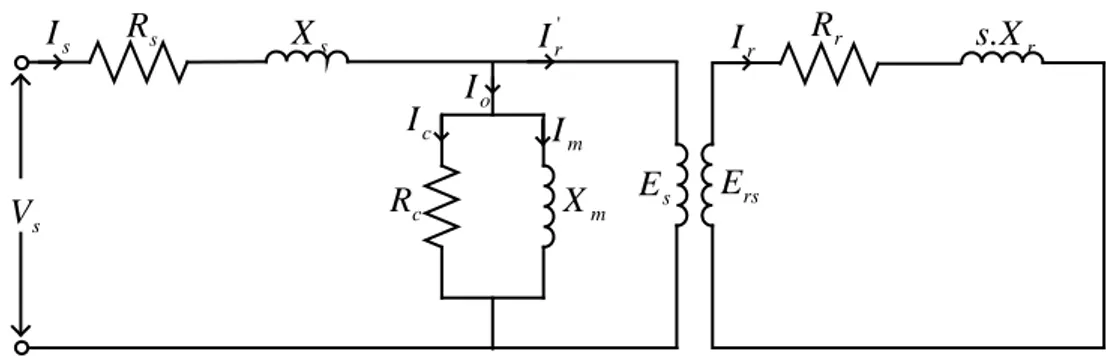
Rangkaian ekivalen pada persamaan (2.12) ditunjukkan pada gambar (2.7) berikut ini:
Gambar 2.7 Rangkaian ekivalen pendekatan motor induksi tiga fasa
Bila persamaan (2.10) disubsitusikan ke persamaan (2.11) maka diperoleh :
r s r s rs I a X s I a R s E = .2 . + . 2 . (2.13)
Mengingat bahwa frekuensi rotor maupun frekuensi stator tidak mempengaruhi resistansi stator ( fr = fs.s), maka persamaan (2.13) menjadi :
r s r s rs I a X s I a R E = 2. + . 2 . (2.14) s V r X s. r R rs E s E r I s R s X m X s I ' r I o I c I m I c R
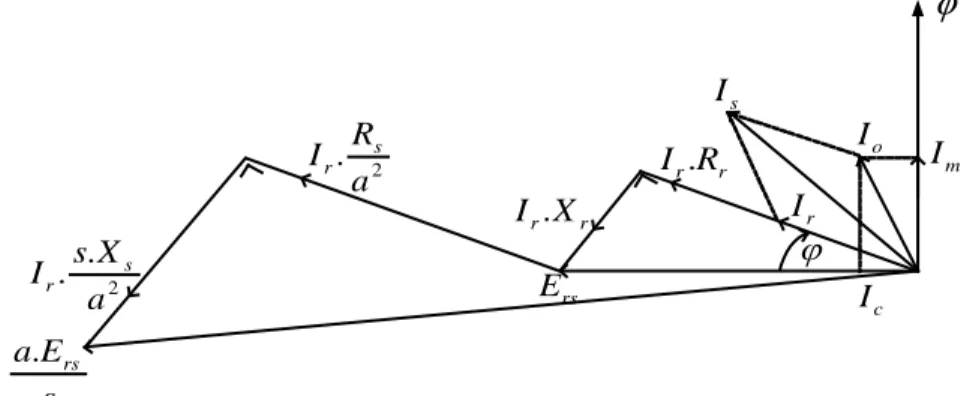
φ m I o I c I s I ϕ r r R I . r I r r X I . 2 . a R I s r rs E 2 . . a X s I s r s E a. rs r X r R 2 . a X s s 2 a Rs r I s I o I m I m X c R c I rs E s E a. rs
Dari persamaan (2.14) didapat :
(
s s)
rs r X js R E a I . . 2 + = (2.15) r r X R Cosϕ = (2.16)Dari persamaan (2.14) rangkaian ekivalen motor ditunjukkan pada gambar (2.8) berikut ini :
Gambar 2.8 Rangkaian ekivalen pada saat motor bergerak dilihat dari rotor Diagram vektor dari motor induksi tiga fasa pada gambar (2.8) ditunjukkan pada gambar (2.9) berikut ini :
φ
sI
oI
' r I s R I a . r. r ' 2 r r X I a2. '. mI
s E s r X I'. s rR I'.ϕ
c I s V2.6.2 Ditinjau Dari Sisi Stator
Dengan mensubsitusi persamaan (2.10) pada persamaan (2.11) maka didapat : r r r r s a I X s R I a E . . . 2. '. ' 2 + = (2.17)
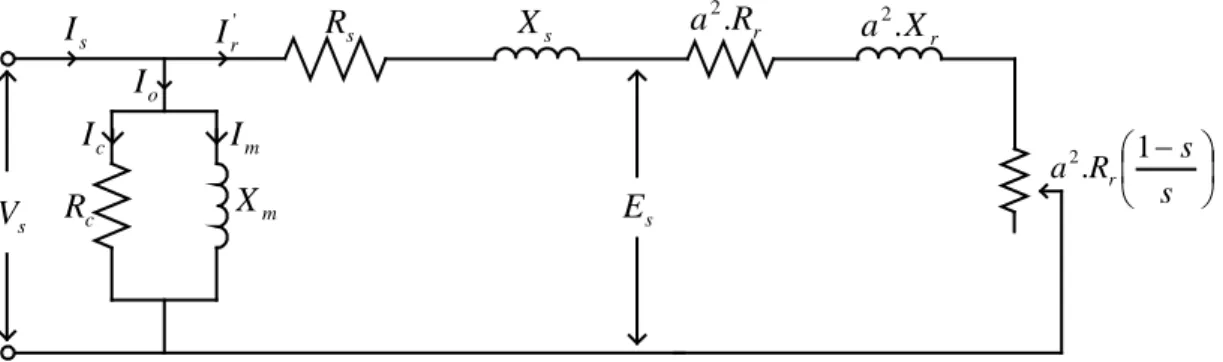
Dari persamaan (2.17) rangkaian ekivalen motor ditunjukkan pada gambar pada gambar (2.10) berikut ini :
Gambar 2.10 Rangkaian ekivalen pada saat motor bergerak dilihat dari stator
Diagram vektor dari motor induksi tiga fasa pada gambar (2.10) ditunjukkan pada gambar (2.11) berikut ini :
Gambar 2.11 Diagram vektor pada saat motor berputar dilihat dari stator Nilai
s Rr
dapat dijabarkan menjadi :
s E r X a2. s R a2. r s X s R ' r I o I m I m X c R c I s I s V
r r r r R R s R s R = + − r r r r R s R R s R − + = − + = s s R R s R r r r 1 (2.18)
Bila persamaan (2.18) disubsitusikan ke persamaan (2.17), maka didapat rangkaian ekivalen motor induksi menjadi:
s E r X a2. r R a2. s X s R ' r I s I o I m I c I m X c R s V − s s R a2. r 1
Gambar 2.12 Rangkaian pengganti pada saat motor berputar dilihat dari stator
Dari persamaan 2.17 didapat nilai :
+ = r r s r jX s R a E I . 2 ' (2.19) r r r jX s R s R + = ϕ cos (2.20)
Dalam teori transformator-statika, analisis rangkaian ekivalen sering disederhanakan dengan mengabaikan seluruh cabang penalaran atau melakukan pendekatan dengan memindahkan langsung ke terminal primer. Pendekatan demikian tidak dibenarkan dalam motor induksi yang bekerja dalam keadaan normal karena adanya celah udara yang menjadikan perlunya suatu arus
pemagnetan yang sangat besar dan karena reaktansi bocor juga perlu lebih tinggi. Untuk itu dalam rangkaian ekivalen Rc dapat dihilangkan (diabaikan). Rangkaian
ekivalennya menjadi seperti Gambar 2.13.
Gambar 2.13 Rangkaian ekivalen motor induksi tiga fasa tanpa rugi inti
2.7 Aliran Daya dan Efisiensi Motor Induksi Tiga Fasa
Telah kita ketahui bersama, bahwa arus start motor induksi 3 fasa lebih besar 5 sampai 7 kali arus nominalnya. Untuk membuktikan arus start tersebut, dapat kita lihat pada rangkaian ekivalen berikut :
Gambar 2.14 Rangkaian ekivalen motor induksi tiga fasa
Dengan memperhatikan model rangkaian diketahui bahwa daya masuk stator untuk motor induksi tiga fasa adalah :
ϕ cos . . . 3 s s s V I P = (2.21)
Dimana : Vs =tegangan sumber
( )
volts E r X a2. r R a2. s X s R ' r I s I o I m I c I m X c R s V − s s R a r 1 . 2
Is =arus masukan
(
ampere)
ϕ = perbedaan sudut fasa antara arus masukan dan tegangan sumber. Daya masuk rotor (terdapat pada celah udara) :
ϕ cos . . . 3 s r' r E I P = (2.22)
Bila persamaan (2.19) dan persamaan (2.20) disubsitusikan ke persamaan (2.22), maka besar daya input rotor pada motor induksi tiga fasa adalah :
(
2) (
2 2)
2 2 2 ) ( . . . . . . 3 s X a R a s R a E P r r r s in r + = (2.23)Sebelum daya ditransfer melewati celah udara, motor induksi mengalami rugi-rugi berupa rugi-rugi tembaga stator (Pts =3.Is2.Rs) dan rugi-rugi inti stator
(
Pis 3.Es /Rc)
2
= . Daya yang ditransfer melalui celah udara
(
3.Pcu)
sama dengan penjumlahan rugi-rugi tembaga rotor(
3.Ptr)
dan daya mekanik(
3.Pd)
. Daya yang ditransfer melalui celah udara ini sering disebut dengan daya input rotor.d tr cu P P P 3. 3. . 3 = +
( )
( )
( )
s R I R s s I R I Pcu 3. r' 2. r 3 r' . 1 r 3. r' 2 r . 3 = − + = (2.24)Untuk lebih jelasnya dapat dilihat pada gambar (2.15) yang menggambarkan diagram aliran daya motor induksi tiga fasa.
Gambar 2.15 Diagram aliran daya pada motor induksi tiga fasa θ cos . . . 3VsIs Rugi – rugi tembaga stator s s R I . . 3 2 Rugi – rugi Inti stator c s R E / . 3 2
( )
I R s Pcu 3. r . / . 3 = ' 2 2' Rugi – rugi tembaga rotor( )
' 2 ' . . 3 Ir Rr Konversi daya Daya Mekanik( )
' 2( )
1 ' . 3 r Rr s s I −Rugi – rugi gesek dan angin g a P& s P s s T.ω
Hubungan antara rugi-rugi tembaga rotor dan daya mekanik dengan daya masukan rotor, masing-masing dalam besaran dapat ditulis sebagai berikut :
( )
r r cu tr I R sP P =3. ' 2. = . (2.25)( )
r r(
)
cu d s P s s R I P ' 2. 1 = 1− . − = (2.26)Dari gambar (2.14) dapat dilihat bahwa motor induksi juga mengalami rugi-rugi gesek dan angin
( )
Pa&g sehingga daya output mekanik yang merupakan daya pengerak poros( )
n sama dengan daya mekanik total(
3.Pd)
dikurangi rugi-rugi gesek dan angin( )
Pa&g .m s g a d o P P T P =3. − & = ω (2.27)
dengan : Ts = torsi pengerak poros
(
N.m)
ωm = kecepatan sudut poros(
rad/s)
Effisiensi suatu motor induksi dapat dinyatakan dengan persamaan berikut;
%
100
%
100
x
P
P
P
x
P
P
i rugi i i o=
−
Σ
=
η
(2.28) b g a tr is ts rugi P P P P P P = + + + + Σ & (2.29) ϕ cos . . . 3 s s i V I P = (2.30) dimana: η =effisiensiPo = daya keluaran (watt)
Pi = daya masukan (watt)
=
=
ts
P rugi tembaga stator (watt)
=
is
P rugi inti stator (watt)
=
tr
P rugi tembaga rotor (watt)
= g a
P& rugi gesek dan angin (watt)
=
b
P rugi buta / lain-lain (watt)
2.8 Torsi Motor Induksi Tiga Fasa
Suatu persamaan torsi pada motor induksi dapat dihasilkan dengan bantuan teori rangkaian Thevenin. Dalam bentuk umumya, teori Thevenin mengijinkan penggantian sembarang jaringan yang terdiri atas unsur-unsur rangkaian linier dan sumber tegangan phasor seperti pada terminal a dan b (Gambar 2.16a), serta juga sumber tegangan phasor Vˆ dalam hubungan seri eq dengan impedansi Zeq (Gambar 2.16b). Rangkaian ekivalen Thevenin, Vˆ berada eq di antara terminal a dan b dari sistem jaringan rangkaian terbuka. Aplikasi dari rangkaian ekivalen motor induksi, titik a dan b didesain pada Gambar 2.13. Rangkaian ekivalen Thevenin diasumsikan pada Gambar 2.17 dimana sumber tegangan Vˆ1,eqterhubung seri dengan impedansi Z1,eq = R1,eq + jX1,eq.
Jaringan Elektrik dari elemen rangkaian linear dan sumber phasor-tegangan konstan Dihubungkan ke jaringan lainnya eq Vˆ e q Zˆ Sumber Tegangan Impedansi Konstan Dihubungkan ke jaringan lainnya a b a b a b
Gambar 2.17 Rangkaian ekivalen Thevenin pada motor induksi
Dari Gambar 2.17(a) dapat dihitung tegangan Thevenin (Vˆ1,eq) dan Impedansi Thevenin (Z1,eq). + + = ) ( ˆ ˆ 1 1 1 , 1 m m eq X X j R jX V V (2.31)
(
)
(
m)
m eq eq eq X X j R jX R jX jX R Z + + + = + = 1 1 1 , 1 , 1 , 1 (2.32)Dari Gambar 2.17(b) nilai Iˆ2dapat dihitung dengan persamaan:
s R jX Z V I eq eq / ˆ ˆ 2 2 , 1 , 1 2 + + = (2.33)
Torsi mekanik pada motor induksi dapat dihitung dengan persamaan berikut:
(
)
(
)
(
) (
)
+ + + = 2 2 , 1 2 2 , 1 2 2 , 1 / / 1 X X s R R s R V n T eq eq eq ph s mech ω (2.34) dimana, c c s poles poles f ω π ω = = 4 2 (2.35)Bentuk umum dari kurva torsi-kecepatan atau torsi-slip pada motor induksi dengan tegangan konstan dan frekuensi konstan ditunjukkan pada Gambar 2.18. Pada keadaan motor bekerja normal, rotor berputar pada arah putaran medan magnetik yang dihasilkan oleh arus stator, kecepatannya diantara nol sampai kecepatan serempak dan slipnya diantara nol dengan satu dimana slip daripada motor adalah satu.
Kecepatan (%) Slip Daerah Generator Daerah Motor Daerah Pengereman Torsi
Gambar 2.18 Kurva karakteristik torsi-kecepatan pada motor induksi Untuk mendapatkan mesin induksi yang bekerja sebagai generator, maka terminal stator dihubungkan pada suatu sumber tegangan dengan frekuensi tetap dan rotornya digerakkan di atas kecepatan serempak dengan suatu penggerak mula.
2.9 Kelas Motor Induksi Tiga Fasa
Standar NEMA pada dasarnya mengkategorikan motor induksi ke dalam empat kelas yakni desain A, B, C dan D. Karakteristik torsi-kecepatannya dapat dilihat pada Gambar 2.19.
Torsi beban penuh
(%) Kelas A Kelas B Kelas C Kelas D Kecepatan (%)
Gambar 2.19 Kurva karakteristik kelas motor induksi
Macam-macam konstruksi motor induksi diklasifikasikan untuk memudahkan memilih motor yang sesuai. Klasifikasi itu sebagai berikut:
- Motor rotor sangkar kelas A, torsi start sekitar 125 sampai 175% torsi nominal dengan arus start 5 sampai dengan 7 kali arus nominal. Motor ini umumnya dijalankan (distart) dengan tegangan tidak penuh. (torsi awal normal, arus start normal).
- Motor rotor sangkar kelas B, biasanya distart langsung dengan tegangan penuh. Reaktansinya relatif tinggi. Arus start sekitar 4,5 sampai dengan 5 kali arus nominal dengan torsi 125 sampai dengan 175 persen. Cos φ
motor kelas B lebih rendah dibanding cos φ motor kelas A. (torsi awal
normal, arus start rendah).
- Motor rotor sangkar kelas C, menggunakan rotor sangkar rangkap (double squirrel cage), biasanya distart dengan tegangan penuh. Arus startnya 4 sampai dengan 5 kali arus nominal dengan torsi start sekitar 2 kali torsi nominal. (torsi start tinggi, arus start rendah).
- Motor rotor sangkar kelas D, reaktansinya relatif tinggi, digunakan untuk pelayanan yang startingnya sangat berat. Efisiensi motor ini selalu lebih rendah dibandingkan efisiensi motor kelas A, B dan C. Motor distart dengan tegangan penuh dengan arus start 4 sampai dengan 5 kali arus nominal. Sedangkan torsi awalnya sekitar 2 sampai 3 kali torsi nominalnya. Digunakan misal pada bulldozers. (torsi start tinggi, slip tinggi).