TUGAS SARJANA
MESIN PEMINDAH BAHAN
PERANCANGAN SISTEM HIDRAULIK DAN
MEKANISME GERAK ELEMEN BATANG PADA
EXCAVATOR BACKHOE
Oleh :
JONLAMSUIS LIMBONG
030421005
DEPARTEMEN TEKNIK MESIN
FAKULTAS TEKNIK
PROGRAM PENDIDIKAN SARJANA EKSTENSION UNIVERSITAS SUMATERA UTARA
TUGAS SARJANA
MESIN PEMINDAH BAHAN
PERANCANGAN SISTEM HIDRAULIK DAN
MEKANISME GERAK ELEMEN BATANG PADA
EXCAVATOR BACKHOE
OLEH :
JONLAMSUIS LIMBONG
NIM : 030421005
Telah Disetujui Dari Hasil Sidang Sarjana
Periode Ke 117 Tanggal 30 Desember 2008
Dosen Pembimbing,
TUGAS SARJANA
MESIN PEMINDAH BAHAN
PERANCANGAN SISTEM HIDRAULIK DAN
MEKANISME GERAK ELEMEN BATANG PADA
EXCAVATOR BACKHOE
OLEH :
JONLAMSUIS LIMBONG
NIM : 030421005
Telah Disetujui Dari Hasil Sidang Sarjana
Periode Ke 117 Tanggal 30 Desember 2008
Dosen Pembanding I, Dosen Pembanding II,
Ir. Isril Amir
Ir. Mulfi Hazwi, M.Sc
KATA PENGANTAR
Segala puji syukur penulis ucapkan kehadiran Allah Bapak yang telah menemani dan melimpahkan kasih dan karunia-Nya kepada penulis sehingga dapat menyelesaikan tugas sarjana ini tepat pada waktunya. Tugas sarjana ini berjudul “Perancangan Sistem Hidraulik dan Mekanisme Gerak Elemen Batang pada Excavator Backhoe”
Tugas sarjana ini disusun sebagai salah satu syarat yang ditempuh bagi setiap Mahasiswa untuk memperoleh gelar sarjana pada Departemen Tehnik Mesin Fakultas Teknik Universitas Sumatera Utara.
Sebagai manusia biasa penulis sadar bahwa dalam penyelesaian Tugas Sarjana ini masih banyak terdapat kekurangan,sehingga penulis mengharapkan kritik beserta saran agar tugas ini dapat menjadi sempurna dan bermamfaat bagi semua.
Penulis banyak mendapatkan bantuan selama menyelesaikan Tugas Sarjana ini, baik bantuan secara langsung maupun tidak langsung. Penulis secara khusus menyampaikan terima kasih yang sebesar-besarnya kepada kedua Orang Tua tercinta Ayahanda M. Limbong dan Ibunda E. Br Sihotang, yang senantiasa melimpahkan kasih sayang perhatian dan dorangan yang terutama dalam materil.
Pada kesempatan ini penulis juga menyampaikan ucapan terima kasih yang sebesar besarnya kepada:
1. Bapak Ir. Tugiman, MT selaku dosen Pembimbing Tugas Sarjana
2. Bapak DR.Ing. Ir. Ikhwansyah Isranuri selaku Ketua Departemen Teknik Mesin USU.
3. Kakak- Kakak ku Leris, Vera dan adekku Mak Gita ,Ceve serta keponakanku yang sangat cantik dan lucu Resgita ( Gita)
4. Seluruh staff pengajar yang mendidik penulis selama perkuliahan dan para pegawai Departemen Teknik Mesin USU.
6. Rekan satu kostku Terutama sahabat aku Ernesto Simbolon Thanzya printernya
7. Serta pihak-pihak yang tidak tersebutkan, yang telah mendukung penulis sehingga dapat menyelesaikan tugas sarjana ini.
Akhirnya penulis memohon dan berdoa semoga Tuhan senantiasa membalas semua budia baik kita semua, dan semoga tugas sarjana ini bermamfaat bagi semua pembacanya.
Medan, 20 Desember 2008 Penulis
DAFTAR SIMBOL
SIMBOL KETERANGAN SATUAN
µdynamika Koefisien Gesek dymanis _
µstatis Koefisien Gesek statis _
A Luas permukaan m2
a Percepatan m/s2
di diameter dalam m
d0 diameter luar m
E modulus elastis N/cm2
F gaya Newton
fc Faktor koreksi _
g Grafitasi bumi m/s2
h Ketinggian m
Hf Head losses m
I Momen inersia m4
L Panjang batang m
m Modul -
n Putaran rpm
p Tekanan Pa
Pd Daya rancangan kWatt
Q Kapasitas aliran m3/s
r Jari-jari m
Re Bilangan Reynold -
S1,S2,Sf Faktor keamanan -
S Langkah m
Sg Spesifik Grafitasi -
t Waktu detik
v kecepatan m/s
V Volume m3
w Berat Kg
x Jarak m
z Jumlah gigi gigi
π phi -
ρ massa jenis kg/m3
DAFTAR ISI
KATA PENGANTAR………... i
SPESIFIKASI TUGAS………..……… iii
DAFTAR ISI………. iv
DAFTAR SIMBOL……….……….……. v
BAB I PENDAHULUAN………... . 1
1.1 LATAR BELAKANG PENULISAN……….. 1
1.2 TUJUAN PERANCANGAN………... 1
1.3 METODE PENULISAN….………. 2
1.4 BATASAN MASALAH……….. 2
BAB II TINJAUAN PUSTAKA……….. 3
2.1 ENERGI PADA SISTEM HIDRAULIK..………... 3
2.2 SISTEM HIDRAULIK….……….. 3
2.2.1 Sistem Lup Terbuka……….……… 4
2.2.2 Sistem Lup Tertutup……….……… 5
2.2.3 Sistem Lup Servo……….………. 6
2.3 KOMPONEN HIDRAULIK….…….……….. 7
2.3.1 Pompa……….……….……… 8
2.3.2 Silinder Hidrolik (Aktuator)…….……… 11
2.3.3 Katup…………..……….………. 14
2.3.4 Fluida Hidrolik dan Penyaringan.……… 16
2.3.5 Tangki Hidrolik……….……… 19
2.3.6 Perapat…………..……….………. 19
BAB III ANALISA BEBAN PADA SISTEM HIDROLIK EXCAVATOR –BACKHOE………. 21
3.2.1 Analisis beban yang harus dipenuhi oleh komponen hidrolik
pada kondisi mengangkut beban penuh……….. 25
3.2.2 Analisis beban yang harus dipenuhi oleh komponen hidrolik pada kondisi menggali……….……… 32
3.3 ANALISIS BEBAN DYNAMIS….………. 38
3.3.1 Pada Silinder Bucket………….………... 38
3.3.2 Pada Silinder stick………….……….. 49
3.3.3 Pada Silinder Bucket….…….………. 59
3.4 ANALISIS KINEMATIS….……… 70
BAB IV PERHITUNGAN KOMPONEN HIDROLIK……….. 82
4.1 SILINDER ( Aktuator)……….…....………... 82
4.1.1 Analisis Tegangan Cincin…...….……… 82
4.1.2 Analisis Buckling……….……… 86
2.3.3 Pemilihan Perapat……….………. 89
4.2 FLUIDA HIDRAULIK………...………... 90
4.3 PEMIPAAN PADA SISTEM HIDROLIK……….. 91
4.4 POMPA HIDROLIK YANG DIBUTUHKAN….………. 102 BAB V SARAN DAN KRITIK………. 108
5.1KESIMPULAN ……… 108
5.2 SARAN……… 108
DAFTAR PUSTAKA LAMPIRAN
ABSTRAK
BAB I
PENDAHULUAN
1.1. LATAR BELAKANG
Latar belakang perencanaan ini adalah mengingat kebutuhan pesawat angkat yang praktis, efisien dan ekonomis sesuai dengan kemajuan tehnologi dalam bidang pembangunan dan industri yang semakin berkembang pesat.
Untuk itu kita ketahui dalam era globalisasi dan industrilisasi seperti sekarang ini dan masa-masa yang akan datang kebutuhan akan pesawat pengangkat sudah semakin mendesak sebagai sarana pendukung pekerjaan yang membutuhkan gerak langkah yang praktis khususnya sistem hidrolik.
Karena dengan bentuk yang kecil dapat menghasilkan daya kerja yang besar disamping itu kontruksinya juga kompak, sistemnya juga sederhana. Untuk itu saya coba untuk merencanakan bagain unit dari Excavator Bachoe.
1.2.TUJUAN PERANCANGAN
1.3. METODE PENULISAN
Metode penulisan yang dilakukan pada penulisan ini meliputi :
a. Melakukan observasi langsung dilapangan dan mencari data – data yang mendukung penulisan.
b. Melakukan studi literatur yaitu mempelajari buku – buku referensi yang berhubungan dengan penulisan.
c. Konsultasi dengan dosen pembimbing perihal tata cara penulisan dan pembahasan pokok permasalahan.
1.3.BATAS MASALAH
BAB II
TINJAUAN PUSTAKA
2.1. ENERGI PADA SISTEM HIDRAULIK.
Perbedaan tekanan pada sistem akam menyebabkan fluida mengalir, perbedaan ini ditimbulkan oleh pemberian energi pada fluida. Energi tersebut berupa energi potensial dan energi kinetic yang diberikan oleh pompa, yang dikopel oleh sebuah penggerak utama seperti, motor bakar dan motor listrik. Aliran yang dihasilkan ini akan dialirkan menuju actuator yang akan mengubah tekanan fluida menjadi gaya yang akan melawan beban.
Energi potensial diukur dalam satuan tinggi ( m ) atau tekanan (Pa), hal ini terukur dari reservoir ke tititk masuk pompa dan grafitasi spesifik (Sg) dan fluida. Untuk fluida ari Sg bernilai 1, sedangkan fluida minyak bernilai kurang dari 1.
Energi tekanan dari fluida diberikan oleh daya pompa untuk melawan beban, energi ini diperoleh dari penggerak utama yang memutar pompa. Dalam perhitungan biaya, energi inilah yang terlibat langsung dalam penentuan biaya operasional.
Energi kinetic, biasanya terlibat hanya sebagian kecil saja dari keseluruhan energi total, hal ini dapat terlihat penurunan tekanan, losses aliran. Perhitungan Energi yang hilang dalam aliran bervariasi dari ukuran pipa dan kecepatan aliran. Ukuran pipa kecil dan kecepatan aliran tinggi akan menghasilkan losses yang tinggi.
2.2. SISTEM HIDRAULIK.
Sistem hidraulik secara umum dibagi atas 3 macam yaitu, sistem lup terbuka, lup tertutup, dan sistem servo.
2.2.1. Sistem Lup Terbuka.
Pada sistem ini tidak memerlukan umpan dari keluaran kecuali kendali operator yang berada diluar sistem. Peforma system detentukan oleh karakter dari masing-masing komponen. Gambar 2.1 ini merupakan contoh dari penggunaan sirkuit lup terbuka.
Gambar 2.1 Sistem Lup-terbuka
Sistem lup terbuka dinilai sangat fleksible dan sederhana, sehingga tidak mengherankan sistem ini sangat luas penggunaannya, biasanya dimanfaatkan didunia permesinan, pengepresan mesin pengangkat dan kendaraan kenderaan.
Keuntungan bila menggunakan sistem ini adalah minyak yang masuk sistem akan selalu segar, sehingga dapat memungkinkan untuk mendapat pendinginan yang baik, pemasangan yang sederhana pada sistem, kotoran pada minyak dapat dipisahkan pada reservoir dengan memasang dinding-dinding pemisah (saringan).
2.2.2. Sistem Lup –Tertutup.
Sinyal keluaran digunakan untuk mengkoreksi sinyal input, hal ini akan berulang hingga mencapai kondisi yang diinginkan. Gambar dibawah ini akan menggambarkan sistem lup tertutup.
Gambar 2.2 Lup Tertutup. A. Skema B. Simbol untuk pompa lepas dan motor. C. Simbol bila keduanya berada dalam satu rumah.
Keuntungan yang diperoleh dari sistem ini adalah pada instalasi ini tidak membutuhkan ruang yang besar sehingga efisiensi volumentrik tinggi, tidak bising karena hanya sedikit saja minyak yang dipompakan pada sistem tersebut, memiki jangkauan pengaturan yang besar.
Kerugian sistem ini hanya sedikit minyak yang dipompakan dan mengalami penyegaran minyak yang sedikit maka minyak ini akan mengalami temperatur yang tinggi.
2.2.3. Sistem Lup- Servo
Pada sistem ini akan terjadi sebuah mekanisme, dimana sinyal untuk memindahkan beban akan diinput melalui servo penguat sinyal sehingga sinyal yang telah diperkuat akan dapat menggerakkan motor, motor ini berfungsi untuk mengkopel poros yang akan menghasilkan linier, gerakan ini akan memindahkan katup pengatur aliran sehingga fluida bertekanan akan masuk ke actuator liner maka beban akan berpindah sesuai perintah dari sinyal input.
Pada suatu perkakas tertentu digunakan sebuah kendali servo hidraulik untuk secara otomatis meniru bentuk sebuah program tertentu, bila system ini diterapkan pada mesin memerlukan sedikit tenaga dan tekanan unutk melayani katup kendali alhasil semua kerja meniru dapat dilakukan, lebih presisi, dapat dilakukan pemilihan kecepatan sesuai keinginan yang dibutuhkan.
2.3. KOMPONEN HIDRAULIK.
Untuk dapat mengalirkan fluida dalam sebuah sistem dan menerapkan tenaga fluida yang dihasilkan maka dibutuhkan komponen-komponen yang memiliki fungsi dan tugas masing-masing, dimana fungsi dan tugas ini haruslah dapat diintegrasikan sehingga akan terbentuk system yang menghasilkan kerja yang akan melayani beban tertentu.
Komponen-komponen ini antara lain : Pompa, katup, pipa/saluran, actuator, fluida. Berikut ini merupakan pemaparan singkat mengenai komponen hidrolik yaitu: 2.3.1. Pompa.
Permulaan dari pengendalian dan pengaturan hidraulik selalu terdiri atas suatu unsur pembangkit tekanan, jadi pada umumnya yang membangkitkan tekanan tersebut adalah pompa. Dalam sebuah sistem hidraulik sebuah keuntungan besar bila komponen memiki kemampuan yang besar tapi berdimensi relatif kecil. Atas keuntungan tersebut, maka hal praktis yang dipilih adalah pompa pindahanan positif yang dipilih.
Gambar Skema 2.3.1. Pengelompokan Pompa.
a. Pompa Pindahan Non Positif
Pada pompa ini, fluida akan mendapatkan gaya sentrifugal, sehingga fluida akan mengalami kenaikan kecepatan, kecepatan yang meningkat akan menurunkan tekanan dari fluida sehingga bila tekanan danlam reservoir sebear 1 atm akan mengalirkan fluida menuju pompa . Pada pompa jenis ini pengklasifikasian dapat dilakukan berdasarkan arah aliran fluida yang keluar, pompa aksial akan menghasilkan arah fluida keluar sejajar dengan arah masuk, pompa radial akan membentuk sudut 900 antara aliran fluida masuk dengan fluida keluarnya, sedangkan pompa campuran akan menghasilkan sudut lebih dari 900 antara aliran
POMPA
Pompa Pindahan nonPositif Pompa Pindahan Positif
FIXED - Roda Gigi - Ulir - Vane - Piston
VARIABEL - Vane - Piston Pompa Sentrifugal
Gambar 2.4. Pompa Pindahan NonPositiif
Pada gambar diatas terlihat bahwa, fluida masuk pada saluran inlet selanjutnya fluida tadi menuju impeller, dari impeller inilah fluida mengalami kenaikan kecepatan, selanjutnya fluida akan menghanatam rumah pompa, karena rumah pompa memiliki bentuk sedemikian rupa maka aliran fluida ini akan tertuntun keluar pompa melalui saluran keluar dengan memiliki ketinggian tertentu.
b. Pompa Pindahan Positif
Dengan adanya pompa yang berbagai jenis, tentunya setiap jenis pompa memiliki keuntungan dan kerugian, untuk pemilihan pompa setiap instalasi hidrolik, diperlukan untuk memperhatikan factor berikut ini agar pemilihan pompa tepat.
a. Tentukan kapasitas aliran fluida.
b. Pilihlah kecepatan, arah aliran, putaran, yang mendekati criteria kebutuhan.
c. Menganalisa keadaan dari sirkuit hidrolik, apakah pompa yang digunakan pindahan positif ataupun bukan.
d. Tentukan tekanan sistem.
e. Perhitungan akan biaya pengoperasionalan dan factor lainnya, seperti: tingkatk kebisingan, karasteristik, keausan dan jadwal pelirahan yang dapat menentukan umur pompa.
2.3.2. SILINDER HIDROLIK (AKTUATOR)
Komponen ini berfungsi merubah energi fluida menjadi gerakan linier, hal ini dilakukan dengan cara mengarahkan fluida yang memiliki energi tadi menuju kesilinder hidrolik, sehingga akan timbul sebuah gaya yang akan memindahkan beban. Gaya yang dihasilkan akan berbanding lurus dengan tekanan dan luasan piston. Sehingga akan didapat sebuah persamaan sebagai berikut,
F = P x A Dimana :
F = gaya yang dihasilkan
Sama halnya dengan pompa silinder hidrolik ini juga memiliki berbagai macam jenis dan fungsi, berikut ini merupakan pengelompokan dari silinder hidrolik.
Skema 2.3.2 Pengelompokan Silinder Hidrolik Silinder
Gaya Tunggal (Single Acting)
Gaya Ganda (Double Acting)
Ram Small Rod
Single end rod Double end rod
Silinder hidrolik terdiri atas silinder, piston, batang piston, saluran dan perapat, hal ini dapat terlihat jelas pada gambar berikut ini:
Gambar 2.7 . Silinder Hidrolik
Piston memiliki luasan yang akan melawan tekanan fluida, luasan ini terpasang pada ujung batang piston, sedangkan ujung batang yang lainnya digunkan untuk melawan gaya dari beban. Lubang silinder, perapat dan saluran berfungsi unutk menjaga fluida agar tetap berada dalam system.
Fungsi silinder Kontruksi silender Gaya yang dibutuhkan Temperatur
Beban
Percepatan dan perlambatan
2.3.3. KATUP
Katup hidrolik dalam sebuah sistem berfungsi untuk mengendalikan tekanan, aliran dan mengarahkan arah aliran fluida. Katup ini dapat dikendalikan oleh manusia, oleh gaya mekanik, tekanan dari fluida, maupun secara elektrik. Penggunaan pengendali dapat dipilih sesuai dengan kebutuhan dari system.
Katup ini bekerja apabila fluida yang masuk pada saluran (inlet) memiliki tekanan yang dapat melawan pegas., sehingga katup terbuka maka aliran akan menuju ke reservoir, maka sistem akan terus menjaga tekanannya pada tekanan tertentu saja.
Katup pengendali arah aliran, katup ini berfungsi untuk mengarah aliran, menutup arah aliran ataupun uga untuk memulai sebuah kerja system. Dalam sebuah aplikasi yang bersifat bergerak katup pengendali ini digerakkan oleh sebuah gaya yang diperoleh dari seorang operator, sedangkan dalam dunia industri penggerak dan pengatur dari katup ini dilakukan oleh solenoid, elektrik, dan gas. Penggunaan katup servo biasanya dilakukan untuk mengatur kapasitas aliran fluida pada sistem hidrolik moderen.
Gambar 2.9. Katup pengatur Arah dan Simbol
Katup diatas memiliki 2 posisi dan 4 arah, artinya 2 posisi menunjukkan bahwa katup tersebut memiliki 2 macam posisi yang dapat diatur oleh pengatur, dan 4 arah artinya fluida masuk dan keluar melalui 4 arah, pada contoh ini arah-arah tersebut adalah dari pompa, menuju reservoir, saruran 1 dan saluran 2 kedua saluran ini merupakan arah aliran.
tersebut adalah dari pompa, menuju reservoir, saluran 1 dan sarluran 2 kedua saluran ini merupakan saluran arah aliran.
Katup pengatur aliran, katup ini berfungsi membatasi jumlah aliran fluida dari pompa ke actuator, katup ini juga mengatur kecepatan alir fluida menuju ke actuator linier, motor hidrolik. Karena kemampuan katup ini membatasi aliran fluida maka ia juga dapat berfungsi untuk membagi fluida menjadi beberapa aliran, sehingga sebuah urutan dari pekerjaan diselesaikan oleh katup.
Gambar 2.10. Katup pengatur Aliran dan Simbol.
Terlihat pada gambar bahwa aliran fluida dapat diatur oleh pengaturan tekan, dan arah aliran hanya satu aliran saja.
2.3.4. FLUIDA HIDROLIK DAN PENYARINGAN
Viskositas, factor ini menentukan kekuatan aliran fluida pada suhu tertentu, viskositas yang tinggi akan menyebabkan fluida sulit mengalir, sedangkan viskositas yang rendah kan memudahkan fluida untuk mengalir (encer) sehingga akan dapat mengalir pada tempat yang sempit. Satuan yang dipakai untuk menentukan nilai viskositas adalah SSU (Saybolt Second Universal) atau juga memakai standar SAE (Society Automovite Engineering). Misalnya SAE 10 pada temperature 1000 F mempunyai viskositas 160-170 SSU. Pemilihan minyak pelumas yang memiliki tidak tepat akan menyebabkan kerugian pada system, viskositas yang tinggi akan membuat kerja pompa semakin berat, kalau terlalu encer akan mudah menyebabkan kebocoran.
Indeks viskositas, indeks viskositas adalah kecepatan perubahan viskositas terhadap perubahan temperature, atau adanya tekanan terus menerus dalam system, minyak fluida yang baik adalah minyak fluida yang tetap dalam keadaan cair pada temp operasi rendah, dan masih cukup kental pada temp operasi tinggi.
Foaming, timbulnya gelembung pada minyak akibat masuknya udara dalam minyak, karena adanya kebocoran pada pada bagian isap system. Minyak hidraulik yang baik harus melarutkan sejumlah udara yang tercampur didalamnya,
Kekuatan film adalah kemampuan minyak untuk membentuk lapisan film yang mampu untuk mendukung beban dan mencegah terjadinya kontak langsung pada permukaan yang bergesakan sehingga mengurangi keausan.
Demulsibilitas adalah kemampuan minyak untuk memisahkan diri dari air yang tercampur didalamnya.
Ketahanan terhadap oksidasi adalah ketahanan minyak untuk tidak teroksidasi pada temperature tinggi.
Pour point adalah kemampuan untuk menunjutkkan sifat atau kemampuan mengalir pada suhu rendah.
serpihan yang ditimbulkan akibat gesekan-gesekan pada system maupun pada tiap-tiap komponen, penyaringan ini dilakukan dengan cara memisahkan partikel atau sepihan dari minyak dengan sebuah media yang memiliki ukuran lubang atau laluan lebih kecil dari serpihan yang terbentuk sehingga bila dialirkan melewati saringan partikel tadi akan tinggal dan terpisah dari minyak, sehingga minyak yang dialirkan akan terbebas dari kotoran, maupun partikel-partiekel yang bersifat menggangu.
Agar fluida dalam keadaan bersih maka dipakai dua macam penyaringan, yaitu filter, dan strainer. Filter digunakan untuk menyaringan kotoran yang sangat halus sedangkan strainer digunakan untuk menyaring kotoran yang lebih besar disbanding yang disaring oleh filter, strainer juga dilengkapi dengan gaya magnet sehingga kotoran yang biasanya terjadi akibat gesekan komponen akan disaring dan ditarik oleh gaya magnet ini.
Mengingat kerja pompa lebih berat pada sisi masuknya maka untuk memperoleh kerja maksimal dari pompa pemasangan filter sesudah pompa, sedangkan strainer dipasang pada titik sebelum pemasangan pompa, pemasangan filter dan strainer diharapkan akan mengalirkan fluida yang bersih.
2.3.5. TANGKI HIDROLIK
Setiap system hidrolik harus memiliki tempat penampungan persediaan minyak, selain untuk menyimpan minyak tangki juga berfungsi tempat pemisahan minyak dengan udara, sekaligus tempat mendinginkan minyak.
Kapasitas tangki haruslah memenuhi untuk:
o Menampung semua minyak yang akan mengalir ketangki karena adanya gravitasi
o Menjaga agar tinggi permukaan minyak tetap berada diatas lubang hisap
o Membuang panas yang berlebih selama operasi normal
o Mampu memisahkan udara dan benda-benda asing lainnya yang terikut dalam minyak hidrolik.
Pada umumnya tangki direncakan berkapasitas 3 kali dari kapasitas Pompa tiap menit.
2.3.6. PERAPAT
Perapat berfungsi untuk menjaga atau mengisolasi antara dua bagian atau lebih,
Pemilihan perapat tergantung dari: 1. Suhu kerja
4. Fluida yang dipergunakan
Beberapa perapat yang digunakan dalam rangkaian hidrolik adalah:
• Cincin O (O ring), digunakan untuk gerakan bolak balik. Berputar, atau statis. Pada poros berputar, batas tekanan maksimum adalah 500 psi dan batas kecepatan putar 200 rpm, biasanya bahan cincin O ini terbuat dari karet dan polimer.
BAB III
ANALISIS BEBAN PADA SISTEM HIDRAULIK
EXCAVATOR –BACKHOE
Dalam rancangan sebuah system haruslah dimulai dengan analisa yan cermat terhadap fungsi dari system tersebut. Dengan kata lain, hal pertama dalam sebuah rancangan system harus ditentukan adalah beban dan siklus beban yang terjadi sehigga akan diperoleh pemenuhan kebutuhan akan beban.
Pada perancangan system hidraulik pada exc-bachoe ini, dilakukan analisa pembebanan lebih dahulu satu, hal ini bertujuan agar system perancangan ini dapatlah memenuhi segala kebutuhan kerja dari Exc-Backhie, analisa pembebanan yang dilakukan antara lain adalah:
• Analisa Beban Statis • Analisa Beban Dinamis • Analisa Kinematis ( gerak )
Kendati pemenuhan kebutuhan merupakan hal yang paling utama dalam sebuah rancangan beberapa hal penyederhanaan ini merupakan pembatasan yang dilakukan untuk memudahkan dalam menganalisa beban yang terjadi.
3.1. Batas masalah Analisa
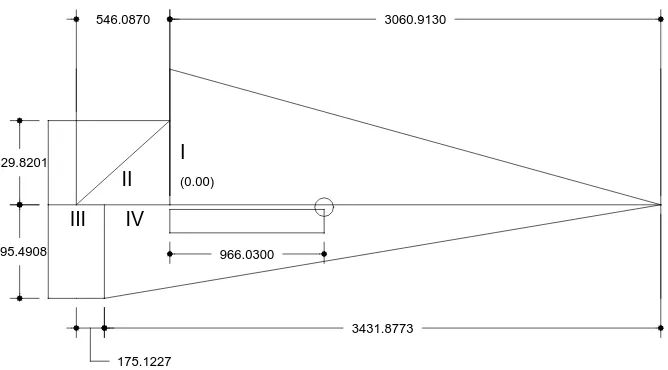
Analisa pembebanan dilakukan dengan data sebagai berikut: 1 Bagian Utama Excavator Backhoe.
546.0870
175.1227
3431.8773 495.4908
429.8201
III IV II
966.0300
3060.9130
(0.00) I Keterangan Gambar
1. Stick Silinder 4. Swing 7. Bucket Silinder 2. Boom 5. Penggerak Kiri-Kanan 8. Stick
3. Boom Silinder 6. Bucket
2. Dimensi Bagian Utama Exc-Backhoe
Pada bagian ini, bentuk dari bagian utama Exc- Backhoe telah mengalami peyederhanaan bentuk, hal ini bertujuan untuk memudahkan pengenalisaan beban.
[image:32.595.156.490.332.517.2]a. Stick
Gambar 3.2 Dimensi Stick
Berat Stick = 999 kg ( Lit 4 ) Koordinat Titik Berat = (966.0319-9.96)
1120.7742
65.7075
219.7238 156.0222
445.4627
III
156.9353
IV
V
II
I
439.4475 134.0150
[image:33.595.110.515.183.384.2]b. Bucket.
Gambar 3.3 Dimensi Bucket
Berat Bucket = 675 kg ( Lit 4 )
Volume = 0.9 m3 ( Lit 4 )
Koordinat titik berat = (341.54-193.547) lamp 2
c. Boom
Gambar 3.4. Dimensi Boom
Berat Boom = 2030 kg ( lit 4)
Koordinat titik berat = (-622.356,704.36) Lamp 2 Material = Baja Alloy dengan perlakuan panas.
3. Jenis Tanah Galian dan data Pendukung
Jenis = Tanah Liat Keras (Hard Clay) lamp 3 Gaya Angkat ( Soil Bearing) = 4000 kg (lamp 3)
Berat Jenis = 3
3 1139.72 /
71 kg m
ft lb
125.6635 61°
A
193.0441Fp. Bucket
W. Bucket
Fs. Bucket 125.663561°
A
193.0441Fp. Bucket
W. Bucket
Fs. Bucket3.2. Analisa Beban Statis
Untuk memperoleh komponen hidraulik yang mampu melayani pembebanan maka perhitungan pembebanan haruslah dilakukan secara cermat, beriktu metode analisa beban statis yang digunakan:
a. Analisa Beban yang harus dipenuhi oleh komponen hidraulik pada kondisi mengangkut beban penuh.
b. Analisa beban yang harus dipenuhi oleh komponen hidraulik pada kondisi mengali
3.2.1. Analisa beban yang harus dipenuhi oleh komponen hidraulik pada
kondisi mengnkut beban penuh.
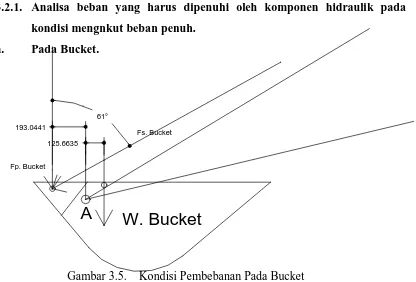
[image:35.595.118.534.271.553.2]a. Pada Bucket.
Gambar 3.5. Kondisi Pembebanan Pada Bucket
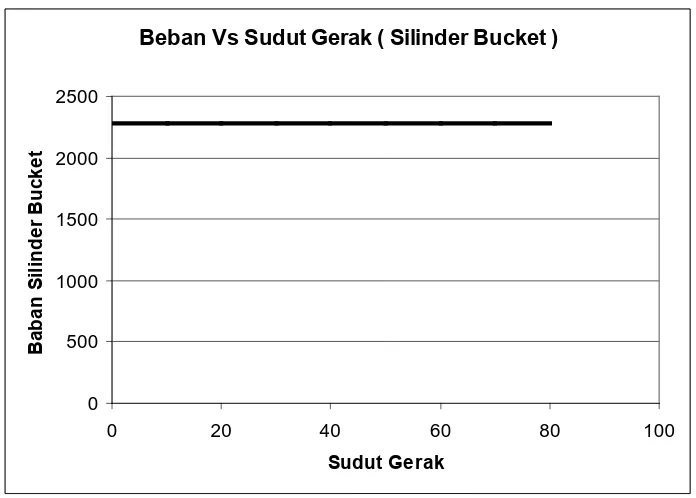
Setelah dilakukan perhitungan diperoleh pembebanan yang dialami Silinder Bucket dapat dilihat pada grafik 3.1.
Dimana: Fp = Proyeksi gaya silinder bucket ( kg ) W.Bucket = Berat Bucket pada kondisi penuh ( kg )
= Berat Bucket + Berat Tanah
= 675 + ( 1139.7 x 0.9 ) = 1700.73 kg.
69 ° 2790.7922
W. Bucket A
W. Stick
Fp. Stick
B F. Stick
462.4778
991.0319
Pada kondisi ini maka akan berlaku persamaan sebagai berikut. ∑MA = O dengan arah searah jarum jam (cw)
( W.Bucket x 125.66)-( Fp Bucket x 193.04 ) = 0 Maka:
FP =
04 . 193
66 . 125 .Bucket x W
= x kg
04 . 193
66 . 125 1700
= 1107.09 kg.
Sehingga yang dialami oleh silinder bucket.
FP Bucket = 0
61 cos
Fp
, dari proyeksi gaya terhadap posisi silinder bucket
FP Bucket = 0
61 cos
09 . 1107
FP Bucket = 2283.56 kg
Sehingga gaya yang bekerja pada silinder Bucket 2283.56 kg.
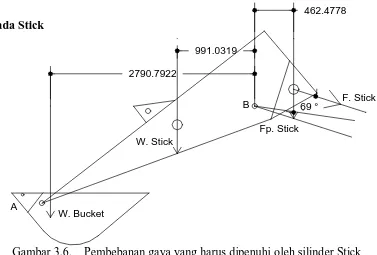
[image:36.595.137.514.405.660.2]b. Pada Stick
Gambar 3.6. Pembebanan gaya yang harus dipenuhi oleh silinder Stick ( Bucket dalam keadaan diam)
Dimana:
W.Bucket = Berat bucket yang terdistribusi pada titik berat = 1700.73 kg
W. Stick = Berat stick yang terpusat pada titik beratnya. = 999 kg.
F. stick = Gaya silinder ( kg).
= 0
69 cos
.stick Fp
Sudut 690 didapat dari proyeksi gaya terhadap posisi silinder stick. Fp.stick = Proyeksi gaya Silinder Stick ( kg),
Pada kondisi ini, maka akan berlaku persamaan sebagai berikut: ∑MB = 0 dengan arah searah jarum jam (cw)
(FP.stick x 462.47) - ( W.stick x 991,03) - ( WBucket x 1790,79) = 0 Fp Stick =
47 , 462 ) 90 , 2790 ( ) 03 , 991
(Wstick x + Wbucket x
Fp Stick =
47 , 462 ) 90 , 2790 73 , 1700 ( ) 03 , 991 999
( x + x
Fp Stick = 12403,87 kg.
Gaya Silinder Stick ( Fstick)
Fstick = 0
69 cos
.stcik Fps
= 0
69 cos
87 , 12403
= 34612,12 kg.
W. Stick 5566.5468 7366.3071 W. Bucket 1140.0693 1701.8993 W. Boom Fs. Boom Fp. Boom C
Tabel 3.1: Data jarak dan pembebanan yang dialami oleh silinder Stick
Sudut Gerak
Jarak W.Bucket –B
( mm )
Jarak W.Stick-B
( mm )
Jarak Gaya Slinder Stcick- B
( mm )
SudutProyeksi Slinder Stick
Beban Silinder Stick
( kg )
0 2790,79 991,03 462,47 69 34612,12
10 2595,07 958,62 426,15 79 66055,34
20 2296,98 897,09 376,87 89 730199,96
30 1935,23 808,31 316,15 81 82876,61
40 1510,88 694,95 245,82 71 40782,29
50 1036,83 560,49 168,01 61 28523,21
60 527,47 408,98 85,11 51 24376,76
70 1,74 245,06 492,29 49 748,80
80 534,75 73,69 88,85 59 3347,69
c. Pada Boom
Gambar3.7. Kondisi Pembebanan Yang dialami Silinder Boom
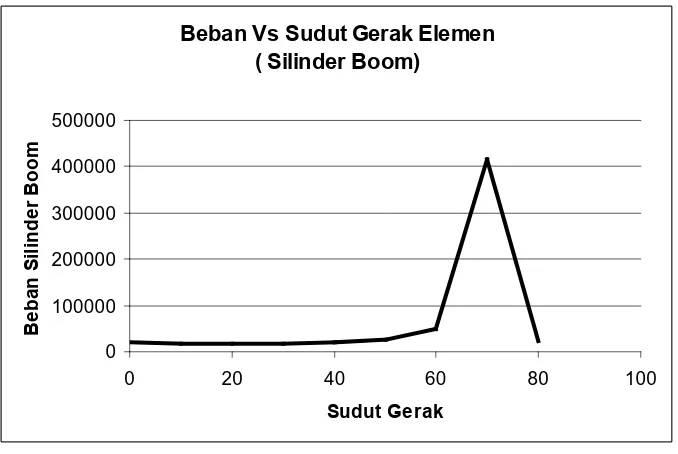
Setelah dilakukan perhitungan diperoleh pembebanan yang dialami Silinder Boom dapat dilihat pada grafik 3.3.
∑MC=0 dengan arah searah jarum jam ( cw)
-(W.bucket x 7366,3) - (W.stick x 5566,5) - ( W.boom x 1710,89) + (Fp.Boom x 1140,069 )
=0 Fp.Boom = 069 , 1140 ) 89 , 1710 . ( ) 5 , 5566 . ( ) 3 , 7366 .
(Wbucket x + W stick x + W Boom x
Fs. Boom = Gaya silinder Boom ( kg) Sehingga; Fp.Boom = 069 , 1140 ) 89 , 1710 2030 ( ) 5 , 5566 999 ( ) 3 , 7366 70 , 1700
( x + x + x
Fp. Boom = 18642,16 kg
Sehinnga gaya yang bekerja pada Silinder Boom
Fs.Boom = 0
17 cos
.Boom Fp
= 0
17 cos
16 , 18642
= 19493,96 kg.
(sudut 170 di dapat dari proyeksi gaya terhadap posisi silinder boom)
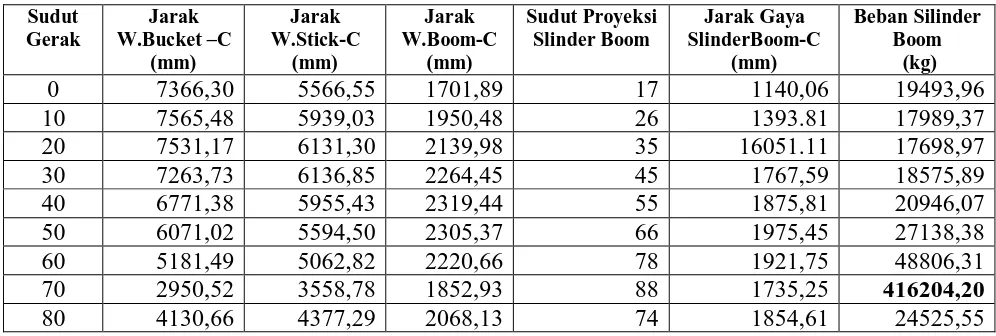
Tabel 3.2 merupakan data perhitungan beban yang diperoleh dengan cara menggekkan boom setiap100.
[image:39.595.69.567.496.664.2]Pada lampiran 16 akan terlihat pergerakan dari mekanisme gerak exc-bachoe, sehingga untuk penggerakan boom tiap100 akan menghasilkan pembebanan maksimum yang tertera pada table berikut ini,
Tabel 3.2: Data Jarak dan pembebanan yang dialami oleh silinder Boom.
Sudut Gerak Jarak W.Bucket –C (mm) Jarak W.Stick-C (mm) Jarak W.Boom-C (mm) Sudut Proyeksi Slinder Boom Jarak Gaya SlinderBoom-C (mm) Beban Silinder Boom (kg)
0 7366,30 5566,55 1701,89 17 1140,06 19493,96
10 7565,48 5939,03 1950,48 26 1393.81 17989,37
20 7531,17 6131,30 2139,98 35 16051.11 17698,97
30 7263,73 6136,85 2264,45 45 1767,59 18575,89
40 6771,38 5955,43 2319,44 55 1875,81 20946,07
50 6071,02 5594,50 2305,37 66 1975,45 27138,38
60 5181,49 5062,82 2220,66 78 1921,75 48806,31
70 2950,52 3558,78 1852,93 88 1735,25 416204,20
80 4130,66 4377,29 2068,13 74 1854,61 24525,55
Beban Vs Sudut Gerak ( Silinder Bucket ) 0 500 1000 1500 2000 2500
0 20 40 60 80 100
Sudut Gerak B a b a n S il in d e r B u c k e t
Beban Vs Sudut Gerak Elemen ( Silinder Stick)
[image:40.595.141.489.84.333.2]0 200000 400000 600000 800000 B e b a n S il in d e r S ti c k
Grafik 3.1: Pembebanan yang dialami Silinder Bucket
Beban Vs Sudut Gerak Elemen ( Silinder Boom)
0 100000 200000 300000 400000 500000
0 20 40 60 80 100
Sudut Gerak
B
e
b
a
n
S
il
in
d
e
r
B
o
o
m
Grafik 3.2: Pembebanan yang dialami Silinder Stick
[image:41.595.134.473.226.453.2]Grafik diatas menunjukkan bahwa pada sudut putaran 200 beban mencapai nilai max, hal ini disebabkan oleh sudut proyeksi antara proyeksi gaya silinder boom dengan gaya silinder boom membentuk sudut 890.
Grafik 3.3: Pembebanan yang dialami Silinder Boom.
Grafik diatas menunjukkan bahwa pada sudut putaran 700 beban mencapai nilai max, hal ini disebabkan oleh sudut proyeksi antara proyeksi gaya silinder boom dengan gaya silinder boom membentuk sudut 880.
Dari grafik diatas maka dapat disimpulkan bahwa: Beban maximal untuk:
3.2.2. Analisa beban yang harus dipenuhi oleh komponen hidraulik pada kondisi menggali.
Kondisi pembebanan yang dialami masing-masing silinder pada saat penggalian dianggap akan mengalami pembebanan yang besar hal ini disebabkan oleh tingkat kekerasan tanah yang berbeda yang akan mempengaruhi kerja dan pembebanan oleh masing-masing silinder. Analisa dilakukan pada silinder Bucket dan Stick karena dianggap kedua silinder ini yang akan melakukan pengerjaan penggalian.
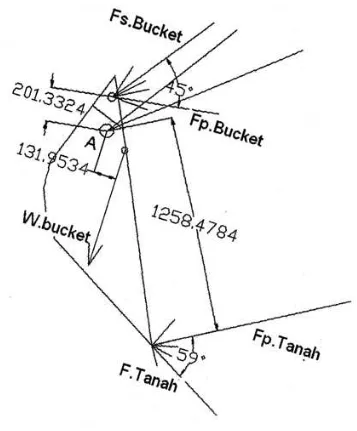
Dari gambar 3.9, dapat dilihat posisi Bucket pada saat pengerukan yang akan mengalami pembebanan yang besar. Untuk menghitung beban yang dialami Bucket, dapat dengan persamaan berikut.
Gambar 3.9. kondisi Bucket pada saat pengerukan.
( Fp.Tanah x 1258,47 ) + ( W.bucket x 13195 ) – ( Fps bucket x 201,3 ) = 0 Fs.bucket = 3 , 201 ) 03 , 151 . ( ) 7 , 1257 .
( Fptnah x + Wpbucket x
Dimana:
F Tanah = gaya tahan tanah = 4,5 ton = 4500 kg (lit3) Fp.tanah = proyeksi gaya tanah ( kg )
= F.Tanah x cos 590
W Bucket = berat bucket kosong = 675 kg Fps Bucket = Proyeksi gaya silinder Bucket ( kg ) Fs Bucket = Gaya yang dialami silinder Bucket ( kg)
= Fps Bucket / cos 450
Fps.Bucket = 3 , 201 ) 03 , 151 . ( ) 7 , 1257 59 cos .
(Fptnah x 0x + Wpbucket x
Fps.Bucket = 3 , 201 ) 03 , 151 675 ( ) 7 , 1257 59 cos 4500
( x 0 x + x
Fps.Bucket = 14986,98 kg
Maka beban yang dialami oleh silinder Bucket
FsBucket = 0
45 cos
.Bucket Fps
= 0
45 cos
98 , 14986
b. Pada Stick
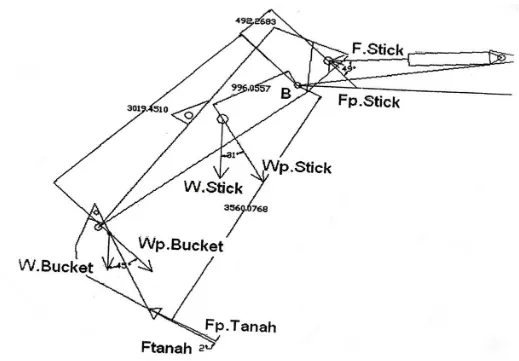
[image:45.595.46.565.297.658.2]Dari gambar 3.10, dapat dilihat posisi Stick pada saat pengerukan yang akan mengalami pembebanan yang besar. Untuk menghitung beban yang dialami stick, dapat dengan persamaan berikut.
-( Fp.Stick x 492,2 ) + ( Fp.Tanah x 3560,07 ) – ( Wp.Bucket x 3019,45) - ( Wp.Stick x 996,05 ) = 0
Fp.Stick = 2 , 492 ) 05 , 996 . ( ) 45 , 3019 . ( ) 07 , 3560 .
(Fptnah x − WpBucket x − WpStick x
Dimana:
F Tanah = gaya tahan tanah = 4,5 ton = 4500 kg (lit3) Fp.tanah = proyeksi gaya tanah ( kg )
= F.Tanah x cos 20
W Bucket = berat bucket kosong = 675 kg Wp Bucket = W Bucket x cos 450
= 675 x cos 450 = 477,29 kg W.Stick = Berat Stick = 999 kg Wp Stick = W Stick x cos 370
= 999 x cos 370 = 797,83 kg Fp Stick = Proyeksi gaya silinder Stick ( kg ) Fs Stick = Fps Stick / cos 490
Sehingga: Fp.Stick = 2 , 492 ) 05 , 996 83 , 797 ( ) 45 , 3019 9 , 477 ( ) 07 , 3560 25 , 4497
Gambar 3.11: Kondisi silinder stick pada saat pengerukan Fps.Stik=
2 , 492
) 5 , 997 18 cos 999 ( ) 48 , 2991 32
cos 675 ( ) 5 , 3348 7
cos 4500
( x 0x − x 0x − x 0x
Fps.Stick = 24981,27 kg
Fs.Stick = 0 57 cos
.stick
Fps
= 0 57 cos
27 , 24981
[image:48.595.108.534.252.453.2]= 45867,57 kg.
Tabel 3.3: Pembebanan max pada kondisi pembebanan
Kondisi Pembebanan Silinder Beban yang dialami ( kg)
1. Pengankutan beban penuh Boom 461204,20
Stick 730199,90
Bucket 2283,56
2. Menggali Stick 42651,99
Bucket 21194,80
3.3. Analisa Beban Dinamis
60° 30° Fxs. Bucket
Fxs. Bucket
Fx. Pin
W. Bucket Fy. Pin
36°
54° Fys. Bucket
Fx. Tanah
Fy. Tanah
F. Tanah
Pembebanan pada bucket mengalami beban maksimum pada kondisi menggali, telah dikehaui pada analisa statis mengenai gaya yang bekerja pada masing-masing komponen berikut ini merupakan nilai dari gaya yang ditumpu oleh pin bucket:
[image:49.595.160.478.271.558.2]Gaya gaya yang terjadi pada pin bucket dapat dilihat pada gambar berikut ini,
Gambar 3.12: Posisi Pin Bucket
Gaya yang terjadi dikondisikan pada beban pin maksimum yang dialami oleh silinder bucket, karena gaya ini akan mempengaruhi besarnya gaya yang bekerja pada pin bucket:
∑Fy = FyPin + Fytanah-Fys.Bucket-W.Bucket = 0
Fy.Pin = Fys.Bucket-Fy.Tanah + W.Bucket Dimana:
Fy.Pin = Gaya reaksi pin pada sumbu y ( kg) Fs.Bucket = Gaya silinder Bucket = 21194,80 kg Fys.Bucket = Gaya silinder Bucket pada sumbu x ( kg)
W.Bucket = Berat Bucket dalam keadaan beban kosong ( 675 kg) F.Tanah = Gaya tanah saat penggalian = 4500 kg
F.pin = Gaya reaksi pin pada sumbu y. Sehingga:
Fy.Pin = Fys.Bucket-Fy.Tanah + W.Bucket
Fy.Pin = Fs.Bucket x cos360- F.Tanah x cos 600 + W.Bucket Fy.Pin = 21194,80x cos360- 4500 x cos 600 + 675
Fy.Pin = 15571,95 kg
- Gaya reaksi pada sumbu x (Rpin.x)
∑Fx = FxPin -Fxs.Buckettanah-FxTanah= 0
Fx.Pin = Fxs.Bucket + Fx.Tanah
M'
M W
M' r
W Dimana :
RF.pin = Result reaksi gaya pada pin bucket.
= FxPin2 +Fy.Pin2
= 2 2
95 , 15571 6
,
16354 +
= 22582,28 kg
Dengan sudut α = tang-1 ( 43,59 ) 6
, 16354
95 ,
15571 = 0
=
Fx Fy
[image:51.595.179.412.561.722.2]
Gambar 3.13 b. Uraian gaya yang timbul akibat pergerakan bucket oleh silinder bucket
W = Berat yang ditumpu pin=RF.pin (kg)
M = Momen yang dihasilkan oleh gaya silinder Bucket M’ = Momen yang ditimbulkan saat pergerakan terjadi.
Gaya gesekan yang terjadi pada pin.
Sehingga didapat sebuah hubungan sebagai berikut:
- Gaya gesek ( pada pin)
Gaya Gesek Statis( Fs)
Fs =
x x r x g x
RFPin µSratis
Dimana
RF.Pin = Result Gaya reaksi pada pin ( kg) R = Jari-jari pin
= 180/2 mm (Survei)
µStatis = koefisien gesek pada logam-logam ( 0,15-0,60 ) lamp 5 = 0,5 diambil
x = Jarak pin ke gaya silinder bucket ( mm) g = Percepatan grafitasi bumi = 9,81 m/s2 sehingga:
- Gaya Gesek dinamis (Fd)
Fd =
x
dinamis x
r x g x
R µ
Dimana:
µdinamis = Koefisien gesek pada logam-logam 0,75 µstatis (lamp 5)
= 0,75 x 0,5 = 0,375
Fd =
33 , 201
375 , 0 90 81 , 9 28 ,
22582 x x x
Fd = 37136,59 N
Silinder bucket ini melayani jarak perpindahan (langkah) sejauh = 309 mm dan dilakukan selama 5,4 detik ( lit3)
Dalam perancangan ini direncanakan waktu yang dibutuhkan untuk melakukan percepatan saat akan mulai bergerak (t1)= 1,2 detik, sedangkan pada saat mencapai kecepatan konstan waktu ( t1) direncanakan 3 detik, sedangkan pada saat akan mau berhenti waktu direncanakan (t3)= 1,2 detik.
Kondisi ini dapat dianalogikan dengan persamaan sebagai berikut: Jarak total yang ditempuh oleh piston (S)
S = S1 + S2 + S3 Dimana
S1 = Jarak tempuh saat percepatan terjadi (mm)
S2 = Jarak tempuh saat percepatan konstan ( a=0) (mm) S3 = Jarak tempuh saat perlambatan terjadi (mm).
S = 2 2 1 t x a x
S = 12
1 1 2 ) ( 2 1 t x t V V −
Kecepatan awal V1 = 0 m/s
S = 2 1
2 1 t x V x
Pada kondisi ini diasumsikan percepatan dan perlambatan mengalami waktu yang sama t1 = t2
sehingga S1 = S2
sedangkan pada kondisi kecepatan Konstan (a =0), jarak yang ditempuh
S2 = V2 x t2
Jadi kecepatan 2 diperoleh: S = 2 S1 + S2
S = 2 1) 2 2 2
1 (
2 V t x V t
S = V2 (t1 + t2) V2 =
) (t1 t2
S
+
V2 =
) 3 2 , 1 ( 309
+ = 73.5 mm/s = 0,0735 m/s
Kecepatan Vs Waktu Silinder Bucket
0 20 40 60 80
0 1 2 3 4 5 6
Waktu ( det)
K
e
c
e
p
a
ta
n
(
m
m
/s
[image:55.595.116.489.87.325.2])
Grafik 3.4. Kec Vs Waktu silinder Bucket
Kecendrungan grafis yang menaik menunjukkan mengalami percepatan, garis mendatar menunjukkan kecepatan konstan dan menurun menunjukkan piston mengalami perlambatan.
Sehingga jarak S1dan S1 adalah:
S1 = 2 1
2 1
t x V x
S1 = 73,5 1,2
2 1
x x
S1 = 44,1 mm = 0,0441 m
Dan jarak S2 adalah: S2 = V2 x t2 S2 = 73,5 x 3
S2 = 220,5 mm = 0,2205 m
a =
1 1 2
t V V −
a = 2 , 1
0 5 , 73 −
== 61,25 mm/s2
- Gaya yang dibutuhkan piston untuk mulai bergerak adalah
Fa = m x a
Dimana
Fa = Gaya piston untuk mulai bergerak (N)
m = Massa yang dipindahkan oleh piston ( beban maksimal ) = 21194,80 kg
a = Percepatan yang terjadi ( 0,06125 m/s2)
sehingga
Fa = m x a
Fa = 21194,8 x 0,06125
Fa = 1298, 18 N
- Gaya gesek yang terjadi pada silinder bucket adalah:
Akibat adanya perapat maka akan terjadi gaya gesekan pada dinding dalam piston Gaya yang terjadi:
Fr = Fs x 0,03 Dimana:
Fr = Fs x 0,03
Fr = 49515,45 x 0,03
Fr = 1485,46 N
Gaya yang ditimbulkan akibat gesekan pada dinding piston dalam adalah : 1485,46 N.
- Gaya total yang dibutuhkan untuk mulai melakukan gerak (Ft) adalah:
Ft = Fa + Fs + Fr
Ft = 1298,18 + 49515,45 + 1485, 46 Ft = 52299,09 N
- Gaya yang dibutuhkan selama kecepatan konstan adalah:
Gaya yang dibutuhkan untuk melawan gaya gerak dinamis ( Fdinamis) Fd = 37136,59 N
Perubahan pembebanan dapad dilihat pada grafik ini. Beban Vs Waktu
Silinder Bucket
0 10000 20000 30000 40000 50000 60000
0 1 2 3 4 5 6
Waktu ( det)
B
e
b
a
n
(
N
Grafik 3.5. Beban Vs Waktu Silinder Bucket
Dari grafik terlihat bahwa beban pada saat piston akan bergerak akan mengalami pembebanan yang besar, hal ini disebabkan oleh gaya gesek statis yang terjadi pada awal pergerakan, tapi setelah gesekan ini hilang maka piston akan mengalami beban yang besifat dinamis, selanjutnya beban kembali menurun karena akan berhenti.
- Tekanan kerja yang diperlukan
Pkerja =
A Ft
Dimana:
Ft = Gaya total untuk menggerakkan piston = 52299,09 N
P = Tekanan kerja (Mpa) A = Luas Piston = 2
4 1
D x
π , D = 0,120 ( dirancang)
= 0,122 4
1 x
π = 0,0113 m2
Maka :
Pkerja =
0113 , 0
09 , 52299
= 4628238,05 Pa = 4,62 Mpa
-Kapasitas aliran yang dibutuhkan untuk kerja ini adalah:
Q = A x V
Dimana:
Q = Kapasitas aliran fluida hidraulik ( m3/s) A = Luas permukaan piston (m2)
V = Kecepatan Piston (m/s) = V2 = 0,0735 m/s Sehingga:
Q = A x V
Kapasitas Vs Langkah Silinder Bucket
0 0.0002 0.0004 0.0006 0.0008 0.001
0 50 100 150 200 250 300 350
Langkah (mm)
K
a
p
a
s
it
a
s
(
m
3
/s
[image:59.595.125.513.88.348.2])
Grafik 3.6. Kapasitas Vs Langkah silinder bucket
Grafik diatas menunjukkan kapasitas yang terjadi pada langkah silinder bucket
3.2.2. Pada Silinder Stick
- Gaya Gesek ( pada Pin)
Gaya yang terjadi dikondisikan pada beban maksimum yang dialami oleh silinder stick, karena gaya ini akan mempengaruhi besarnya gaya yang bekerja pada pin Stick berikut ini.
- Gaya reaksi pin pada sumbu y ( Fy.pin)
∑Fy = 0
Fy.pin + Fpy.Stick- W.Bucket- W.Stick Dimana:
Fy.pin = Gaya reaksi pin pada sumbu y ( kg)
W. Stick
495.5
1°
89°
Fx. Pin
Fy. Pin
Fpy. Stick
Fpx. Stick Fs. Stick
Fpy.stick = FS.Stick x cos 890
= 730199,9 x cos 890 = 12743,75 kg
Gambar3.14. Posisi Pin Stick
W.Bucket = Berat Bucket dalam keadaan beban penuh ( 1700,73 kg) W.Stick = Berat Stick (999 kg)
Sehingga:
Fy.Pin + Fpy.Stick-W.Bucket- W.Stick = 0 Fy.Pin = - Fpy.Stick + W.Bucket + W.Stick Fy.Pin = -12743,75 + 1700,73 + 999 Fy.Pin = -10035 kg
Fy.Pin = 10035 kg
- Gaya reaksi pin pada sumbu x (Rpin.x)
∑Fx= -Fxpin + Fxs.Stick = 0
Dimana
Fxpin = Proyeksi gaya pin arah sumbu x ( kg)
Fxs.Stick = Proyeksi gaya silinder stick pada sumbu x ( kg) Sehingga:
Fxpin = Fxs.Stick Fxpin = Fs.Stick x cos 10 Fxpin = 730088,68 kg
Gambar 3.15:
a. Uraian gaya yang timbul akibat pergerakan stick oleh silinder stick
b. Momen yang mengandung gaya gesek pada pin Stick saat terjadi pergerakan
Dimana:
RF.pin = Result reaksi pada pin bucket.
= FxPin2 +Fy.Pin2
= 730088,682 +10035,022
= 730157,6 kg
= dengan sudut α = Tang-1 ( 0,78 ) 68
, 730088
02 ,
10035 0
= =
Fx Fy
W = Berat yang ditumpu pin=RF.pin (kg)
Gaya gesekan yang terjadi di pin sehingga didapat sebuah hubungan sebagai berikut:
- Gaya gesek ( pada pin)
Gaya gesek statis (Fs)
Fs =
x x r x g x
RFPin µSratis
Dimana:
RF.Pin = Result Gaya reaksi pada pin ( kg) R = Jari-jari pin
= 180/2 mm (Survei)
µStatis = koefisien gesek pada logam-logam (0,15-0,60) lamp 5 = 0,5 diambil
x = Jarak pin ke gaya silinder bucket ( mm) g = Percepatan grafitasi bumi =9,81 m/s2 sehingga:
Fs =
56 , 495
5 , 0 90 81 , 9 6 ,
730157 x x x
Fs = 650431,98 N
- Gaya Gesek dinamis (Fd)
Fd =
x
dinamis x
r x g x
R µ
Dimana:
µdinamis = Koefisien gesek pada logam-logam 0,75 µstatis (lamp 5)
Fd = 56 , 495 375 , 0 90 81 , 9 6 ,
730157 x x x
Fd = 455302,38 N
Silinder Stick ini melanyani jarak perpindahan (langkah) sejauh = 924 mm dan dilakukan selama 5,4 detik.
Dalam perancangan ini direncanakan waktu yang dibutuhkan untuk melakukan percepatan saat akan dimulai bergerak ( t1 )=1,4 detik, sedangkan pada saat mencapai kec konstan waktu ( t2 ) direncankan 2,6 detik, sedangkan pada saat akan mau berhenti waktu direncanakan ( t3 ) 1,4 detik.
Kondisi ini dapat dianalogikan dengan persamaan sebagai berikut: Jarak total yang ditempuh oleh piston (S)
S = S1 + S2 + S3 Dimana
S1 = Jarak tempuh saat percepatan terjadi (mm)
S2 = Jarak tempuh saat percepatan konstan ( a=0) (mm) S3 = Jarak tempuh saat perlambatan terjadi (mm).
Pada kondisi percepatan dan perlambatan berlaku persamaan jarak:
S = 2
2 1 t x a x
S = 12
1 1 2 ) ( 2 1 t x t V V −
Kecepatan awal V1 = 0 m/s
S = 2 1
2 1 t x V x
S2 = V2 x t2
Jadi kecepatan 2 diperoleh: S = 2 S1 + S2
S = 2 1) 2 2 2
1 (
2 V t x V t
S = V2 ( t1 + t2 ) V2 =
) (t1 t2
S
+
V2 =
) 6 , 2 4 , 1 (
924
+ = 231 mm/s = 0,231 m/s
Dan bila diplotkan dalam grafik akan akan terlihat seperti grafik dibawah ini.
Kecepatan Vs Waktu
Silinder Stick
0 50 100 150 200 250
0 1 2 3 4 5 6
Waktu ( det)
K
e
c
e
p
a
ta
n
(
m
m
/s
[image:65.595.118.522.398.670.2])
Kecendrungan gari yang menaik menunjukkan mengalami percepatan, garis mendatar menunjukkan kecepatan konstan dan menurun menunjukkan piston mengalami perlambatan.
Sehingga jarak S1dan S3 adalah:
S1 = 2 1
2 1
t x V x
S1 = 231 1,4 2
1
x x
S1 = 161,7 mm = 0,1617 m
Dan jarak S2 adalah: S2 = V2 x t2 S2 = 231 x 2,6
S2 = 600,6 mm = 0,6 m
Percepatan yang terjadi adalah sama dengan perlambatan yang terjadi sehingga: a =
1 1 2
t V V −
a = 4 , 1
0 231−
== 165 mm/s2 = 0,165 m/s2
- Gaya yang dibutuhkan piston untuk mulai bergerak adalah
Fa = m x a
Dimana
Fa = Gaya piston untuk mulai bergerak (N)
m = Massa yang dipindahkan oleh piston ( beban maksimal ) = 730199,9 kg
66
Beban Vs Waktu Silinder Stick
800000 1000000
e
b
a
n
(
N
)
Fa = 730199,9 x 0,165
Fa = 120482,98 N
- Gaya gesek yang terjadi pada silinder bucket adalah:
Akibat adanya perapat maka akan terjadi gaya gesekan pada dinding dalam piston Gaya yang terjadi:
Fr = Fs x 0,03 Dimana:
Fr = Gaya gesek silinder akibat adaya perapat (N) Fs = Gaya gesek statis = 650431,98 N
Sehingga
Fr = Fs x 0,03
Fr = 650431,98 x 0,03 Fr = 19513 N
Gaya yang ditimbulkan akibat gesekan pada dinding piston dalam adalah : 535,09 N.
- Gaya total yang dibutuhkan untuk mulai melakukan gerak (Ft) adalah:
Ft = Fa + Fs + Fr
Ft = 120482,98 + 650431,98 + 19513 Ft = 790427,93 N
- Gaya yang dibutuhkan selama kecepatan konstan adalah:
Gaya yang dibutuhkan untuk melawan gaya gerak dinamis ( Fdinamis) Fd = 455302,38 N
Perubahan pembebanan dapat dilihat pada grafik dibawah ini.
Dari grafik terlihat bahwa beban pada piston akan bergerak akan mengalami pembebanan yang besar, hal ini disebabkan oleh gaya gesek stasis yang terjadi pada awal pergerakan, tapi setelah gesekan ini hilang maka piston akan mengalami beban yang bersifat dinamis, selanjutnya beban kembali menurun karena akan berhenti.
Grafik 3.8. Beban Vs Wakatu silinder Stick
-Tekanan kerja yang diperlukan
Pkerja =
A Ft
Dimana:
Ft = Gaya total untuk menggerakkan piston = 790427,93N
P = Tekanan kerja (Mpa) A = Luas Piston(memilki batang)
= Luas piston-Luas permukaan batang piston
= 2
4 1
D x
π - 2
4 1
b
D x
π
= ( )
4
1 2 2
b D
D −
Db = Diameter batang
= ( 0,5-0,7) x D (Lit 12, hal 269) Sehingga :
= (0,25 0,175 ) 4
1π 2 − 2
= 0,025 m2 Maka :
Pkerja =
025 , 0
93 , 790427
= 31617118,4 Pa = 31,6 Mpa -Kapasitas aliran yang dibutuhkan untuk kerja ini adalah:
Q = A x V
Dimana:
Q = Kapasitas aliran fluida hidraulik ( m3/s)
A = Luas permukaan piston (m2)(permukaan tanpa batang) = 2
4 1
D
π = 0,252 4
1 x
xπ = 0,049 m2 V = Kecepatan Piston (m/s) = V2 = 0,0231 m/s Sehingga:
Q = A x V
Kapasitas Vs Langkah Silinder Stick
0 0.002 0.004 0.006 0.008 0.01 0.012
0 200 400 600 800 1000
Langkah (mm)
K
a
p
a
s
it
a
s
(
m
3
/s
[image:70.595.118.508.88.362.2])
Grafik 3.9. Kapasitas Vs Langkah
Grafik ini menunjukkan kapasitas yang terjadi pada silinder stick.
3.3.3. Pada Silinder Boom
- Gaya Gesek
Gaya yang terjadi dikondisikan pada beban maksimum yang dialami oleh silinder Boom, karena gaya ini akan mempengaruhi besarnya gaya yang bekerja pada pin Boom berikut ini.
- Gaya Reaksi pin pada sumbu y ( Fy.pin)
W. Bucket W. Stick
88° FxPin
W. Boom Fpy. Boom
FyPin
Fpx. Boom 02 Fy.Pin = Gaya reaksi pin pada sumbu y ( kg)
Fs.Boom = Gaya silinder Boom pada beban maximal (416204,20 kg) W.Bucket = Berat Bucket dalam keadaan beban Penuh ( 1700,73kg) W.Stick = Berat Stick (999kg)
W.Boom = Berat Boom (2030 kg)
[image:71.595.189.410.280.577.2]Gaya –gaya yang terjadi pada pin Boom dapat terlihat pada gambar berikut ini,
Gambar 3.16. Posisi Pin Boom
Fy.pin = Fsy.boom + W.Bucket + W.Stick + W.Boom Sehingga
M
Fx.pin = Fs. Boom x cos 20 Fx.pin = 416204,2 x cos 20 Fx.pin = 415950,6 N
[image:72.595.172.410.248.488.2]Gaya dan momen yang bekerja pada pin boom.
Gambar 3.17. a. Uraian gaya timbul akibat pergerakan boom oleh silinder Bucket b. Momen’ yang mengandung gaya gesek pada pin Boom saat terjadi
pergerakan Dimana:
RF.pin = Result reaksi pada pin boom.
= 416396,03 kg
= dengan sudut α = Tang-1 ( 2,65 ) 6
, 415950
19255 = 0
=
Fx Fy
W = Berat yang ditumpu pin=RF.pin (kg)
M = Momen yang dihasilkan oleh gaya silinder Boom M’ = Momen yang ditimbulkan saat pergerakan terjadi
Gaya Gesek yang terjadi pada pin
Sehingga di dapat sebuah hubungan sebagai berikut:
- Gaya Gesek ( pada pin)
Gaya gesek statis (Fs) Fs =
x x r x g x
RRPin µSratis
Dimana:
RR.Pin = Result Gaya reaksi pada pin ( kg) R = Jari-jari pin
= 185/2 mm (Survei)
µStatis = koefisien gesek pada logam-logam (0,15-0,60) lamp 5 = 0,55 diambil
x = Jarak pin ke gaya silinder bucket ( mm) g = Percepatan grafitasi bumi =9,81 m/s2 sehingga:
Fs =
82 , 1931
5 , 0 90 81 , 9 03 ,
41639 x x x
-Gaya Gesek dinamis (Fd)
Fd =
x
dinamis x
r x g x
R µ
Dimana:
µdinamis = Koefisien gesek pada logam-logam 0,75 µstatis (lamp 5)
= 0,75 x 0,55 = 0,4125 Fd =
82 , 1931
4125 , 0 9225 81
, 9 03 ,
416396 x x x
Fd = 416396,03 kg Fd = 80681,62 N
Silinder Boom ini melanyani jarak perpindahan (langkah) sejauh = 689 mm dan dilakukan selama 5,4 detik. (lit3)
Dalam perancangan ini direncanakan waktu yang dibutuhkan untuk melakukan percepatan saat akan dimulai bergerak ( t1 )=1 detik, sedangkan pada saat mencapai kec konstan waktu ( t2 ) direncankan 3,4 detik, sedangkan pada saat akan mau berhenti waktu direncanakan ( t3 ) 1 detik.
Kondisi ini dapat dianalogikan dengan persamaan sebagai berikut: Jarak total yang ditempuh oleh piston (S)
S = S1 + S2 + S3 Dimana
S1 = Jarak tempuh saat percepatan terjadi (mm)
S2 = Jarak tempuh saat percepatan konstan ( a=0) (mm) S3 = Jarak tempuh saat perlambatan terjadi (mm).
Pada kondisi percepatan dan perlambatan berlaku persamaan jarak:
S = 1 2
74 Kecepatan awal V1 = 0 m/s
S = 2 1
2 1 t x V x
Pada kondisi ini diasumsikan percepatan dan perlambatan mengalami waktu yang sama t1 = t2
sehingga S1 = S3
sedangkan pada kondisi kecepatan Konstan (a =0), jarak yang ditempuh S2 = V2 x t2
Jadi kecepatan 2 diperoleh: S = 2 S1 + S2 S = 2 1) 2 2
2 1 (
2 V t xV t
S = V2 (t1 + t2) V2 =
) (t1 t2
S
+
V2 =
) 4 , 3 1 ( 689
+ = 156,6 mm/s = 0,1566 m/s
Dan bila diplotkan dalam grafik akan akan terlihat seperti grafik dibawah ini.
Kecepatan Vs Waktu Silinder Boom 100 150 200 K e c e p a ta n ( m m /s )
Grafik 3.10. Kec Vs Waktu Silinder Boom.
Kecendrungan garis yang menaik menunjukkan mengalami percepatan, garis mendatar menunjukkan kecepatan konstan dan menurun menunjukkan piston mengalami perlambatan.
Sehingga jarak S1dan S3 adalah: S1 = 2 1
2 1
t x V x
S1 = 156,6 1
2 1
x x
S1 = 78,3 mm = 0,0783 m
Dan jarak S2 adalah: S2 = V2 x t2 S2 = 156 x 3,4
S2 = 532,44 mm = 0,5324 m
Percepatan yang terjadi adalah sama dengan perlambatan yang terjadi sehingga: a =
1 1 2
t V V −
Fa = m x a
Dimana
Fa = Gaya piston untuk mulai bergerak (N)
m = Massa yang dipindahkan oleh piston ( beban maksimal ) = 416204,20 kg
a = Percepatan yang terjadi ( 0,156 m/s2) sehingga
Fa = m x a
Fa = 416204,20 x 0,156
Fa = 64927,85 N
- Gaya gesek yang terjadi pada silinder bucket adalah:
Akibat adanya perapat maka akan terjadi gaya gesekan pada dinding dalam piston Gaya yang terjadi:
Fr = Fs x 0,03 Dimana:
Fr = Gaya gesek silinder akibat adaya perapat (N) Fs = Gaya gesek statis = 107575,.49 N
Sehingga
Fr = Fs x 0,03
Fr = 107575,.49 x 0,03 Fr = 3227,26 N
Gaya yang ditimbulkan akibat gesekan pada dinding piston dalam adalah : 3227,26 N.
- Gaya total yang dibutuhkan untuk mulai melakukan gerak (Ft) adalah:
Ft = Fa + Fs + Fr
Ft = 175690,98 N
- Gaya yang dibutuhkan selama kecepatan konstan adalah:
Gaya yang dibutuhkan untuk melawan gaya gerak dinamis ( Fdinamis) Fd = 80681,62 N
Perubahan pembebanan dapat dilihat pada grafik dibawah ini.
Dari grafik terlihat bahwa beban pada saat piston akan bergerak akan mengalami pembebanan yang besar, hal ini disebabkan oleh gaya gesek stasis yang terjadi pada awal pergerakan, tapi setelah gesekan ini hilang maka piston akan mengalami beban yang bersifat dinamis, selanjutnya beban kembali menurun karena akan berhenti.
Beban Vs Waktu Silinder Boom
0 200000 400000 600000 800000 1000000 1200000
0 1 2 3 4 5 6
Waktu ( det)
B
e
b
a
n
(
k
g
[image:78.595.117.503.338.628.2])
Grafik 3.11. Beban Vs Langkah silinder Boom
Dimana:
Ft = Gaya total untuk menggerakkan piston
Khusus pada piston boom terdapat 2 buah piston sehingga gaya yang dihasilkan akan terbagi menjadi 2, gaya yang dibebani oleh 1 piston boom adalah.
Ft = 175690,98 Ft
2 1
=175690,98 N Ft = 87845,49 N
P = Tekanan kerja (Mpa) A = Luas Piston
= 2
4 1
D x
π ,D = 0,120 m ( dirancang)
= 2
12 , 0 4
1 x
π m
= 0,0113 m2
Maka :
Pkerja =
0113 , 0
49 , 87845
= 7767246,64 Pa = 7,7 Mpa
- Kapasitas aliran yang dibutuhkan untuk kerja ini adalah:
Q = A x V
Dimana:
Q = Kapasitas aliran fluida hidraulik ( m3/s) A = Luas permukaan piston (m2)
Sehingga:
Q = A x V
Q = 0,0113 m2 x 0,1566 m/s Q = 0,00177 m3/s
Kapasitas Vs Langkah Silinder Boom
0 0.0005 0.001 0.0015 0.002
0 100 200 300 400 500 600 700 800
Langkah (mm)
K
a
p
a
s
it
a
s
(
m
3
/s
[image:80.595.122.514.249.519.2])
Grafik 3.12. Kapasitas Vs Langkah
Grafik 3.12. menunjukkan kapasitas yang terjadi pada langkah silinder Stick
.
A A
Q
Boom = 0,0177 m3/sKhusus untuk kapasitas silinder boom terdiri dua piston yang terdapat di sebalah kanan dan sebelah kiri Boom.
Dari ketiga piston tersebut diperoleh bahwa aliran fluida hidrulik yang paling besar adalah piston Boom.
Jadi total kapasitas aliran fluida hidraulik
Q
Total adalah:Q
Total =Q
Bucket +Q
Stik + 2 (Q
Boom )= 0,00083 m3/s + 0,0113 m3/s + 2 ( 0,0177m3/s )
Q
Total = 0,01567 m3/s3.4. Analisa Kinematika
Gambar3.18. Mekanisme Elemen Batang pada Exc-Bachoe, digerakkan oleh silinder boom
Keterangan Gambar
1. Rumah Ikat VB = 0,1566 m/s 2. Batang Piston AB = 0,156 m/s 3. Silinder batang 2 = 1,3 m 4. Batang Boom
O = Engsel A = Pin Bucket
B = Silinder Boom dan Piston Mekanisme ini terdiri atas :
4 Elemen bidang : a. 1 Rumah Ikat
b. 1 Batang Boom ( dianggap Boom, Bucket, Stick diam) c. 1 Silinder Piston
d. 1 Piston. 4 Sambungan:
a. 2 engsel (O) b. 1 pin Boom (A)
c. 1 silinder dan piston (B)
Mekanisme diatas memeiliki derajat kebebasan (x) x = 3 ( L-1)-∑ ( 3-fi )
fi = derajat kebebasan sambung maka:
x = 3 ( L-1)-∑ ( 3-fi )
x = 3(L-1)-[(3-1) + (3-1)+ (3-1)] x = 3(4-1) - [8]
x = 9-8 x = 1,
dapat disimpimpulkan bahwa mekanisme diatas, dapat dianalisa dengan 1 masukan ( x =1)
Analisa Kecepatan,
- Kecepatan pada titik a (Va)
VA = VB2 I VA/B2 Dimana
VA = kecepatan dititik A ( arahnya siku-siku AO1)
Gambar 3.13. Grafik Vektor kecepatan degan skala (1:10)
VA = 49 x10 = 490 mm/s VA/B2 = 46 x10 = 460 mm/s
1 AO
VA A =
ϖ =
85 , 1932
490
= 0,25 rad/s (ccw)
Analisa Percepatan
-Percepatan pada titik A (AA)
AA = AAt AAn dan AA = AB2 AA/Bn AA/B2t Dimana
AA = percepatan dititik a
AAt = percepatan tangensial dititik A (arahnya siku-siku O1A) AAn = percepatan normal dititik A ( arahnya sejajar O1A menuju O1)
1 2 AO V AAn = A =
85 , 1932
4902
= 124,2 mm/s2
AB2 = percepatan pada titik B (156 mm/s2 arahnya sejajar AB)
492.30
02
4 A 2
01 B
3 =
AB VA/B22
= 130 4602
= 162,76 mm/s2
AA/B2t = kecepatan relatif tangensial titik A terhadap titik B2 (arahnya siku-siku AB2)
dengan menggunakan metode analisa vector maka percepatan yang terjadi, dapat dilihat pada vector diagram yang terjadi diagram dengan skala 1:10 sehingga didapat| :
[image:85.595.181.539.694.808.2]AA = 47 x 10 = 470 mm/s AAt = 46 x 10 = 460 mm/s AA/Bt = 43,3 x10 = 433 mm/s
Gambar 3.14. Grafik Vektor percepatan dengan skala 1:10
Gambar 3.19. Mekansime elemen batang stick pada Exc-backboe Keterangan Gambar
5. Rumah Ikat VB = 0,231m/s 6. Batang Piston AB = 0,165 m/s 7. Silinder batang 2 = 2 m 8. Batang Stick
O = Engsel A = Pin Boom
B = Silinder Stick dan Piston Mekanisme ini terdiri atas :
4 Elemen bidang : a. 1 Rumah Ikat
b. 1 Batang Stick ( dianggap Bucket, Stick diam) c. 1 Silinder Piston
d. 1 Piston. 4 Sambungan:
a. 2 engsel (O) b. 1pin Stick (A)
c. 1 silinder dan piston (B)
L = jumlah batang
fi = derajat kebebasan sambung maka:
x = 3 ( L-1)-∑ ( 3-fi )
x = 3(L-1)-[(3-1) + (3-1)+ (3-1)] x = 3(4-1) - [8]
x = 9-8 x = 1,
dapat disimpimpulkan bahwa mekanisme diatas, dapat dianalisa dengan 1 masukan ( x =1)
Analisa Kecepatan,
- Kecepatan pada titik a (Va) VA = VB VA/B
Dimana
VA = kecepatan dititik A ( arahnya siku-siku AO2)
VB = kecepatan dititik B2 (231 mm/s, arahnya sejajar AO1 menuju O1) VA/B = kecepatan relatif titik A terhadap titik B ( arahnya siku-siku AB1) Dengan menggunakan metode analisa Vektor maka kecepatan yang terjadi, ( pada analisa Vektor ini Vektor diagram yang terjadi digambarkan dengan skaa 1:10) terlihat pada diagram Vektor kecepatan berikut ini,
Sehingga :
VA = 25 x10 = 250 mm/s VA/B = 19 x10 = 190 mm/s
A O
VA A
2
=
ϖ =
3 , 492
250
01 1
1
1 Analisa Percepatan
-Percepatan pada titik A (AA)
AA = AAt AAn dan AA = AB2 AA/Bn AA/B2t
Dimana
AA = percepatan dititik a
AAt = percepatan tangensial dititik A (arahnya siku-siku O2A) AAn = percepatan normal dititik A ( arahnya sejajar O2A menuju O2)
1 2 AO V AAn = A =
85 , 1932
4902
= 124,2 mm/s2
AB = percepatan pada titik B (165 mm/s2 arahnya sejajar AB)
AA/B2n = kecepatan relative normal titik A