Pengaruh Metode Pengaturan Kecepatan Motor DC Menggunakan Pengaturan Tahanan Jangkar Terhadap Efisiensi Motor DC SHUNT
Teks penuh
Gambar

Dokumen terkait
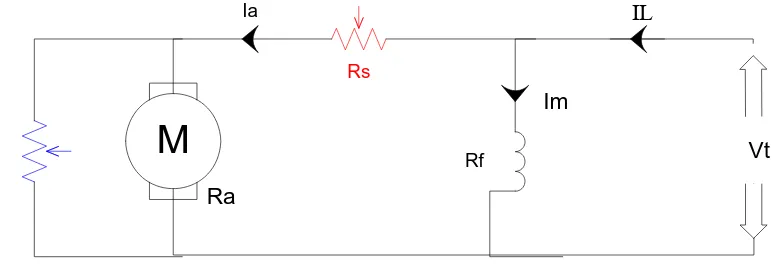
Pada saat motor arus searah penguatan seri diberi beban maka pada kumparan stator akan mengalir arus jangkar.Dan arus ini akan menimbulkan fluksi jangkar yang
[3] Jaya, Kaban, Skripsi – Studi Penentuan Rugi-Rugi Motor Arus Searah. Penguatan Kompon Pendek Dengan Menggunakan Metode
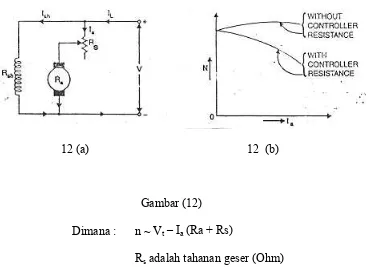
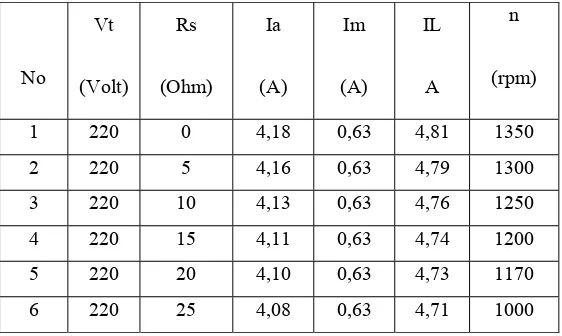
Gambar 3.6 Grafik kecepatan terhadap torsi Pada motor berbeban dengan sistem kalang terbuka, terlihat adanya penurunan kecepatan motor jika arus jangkar semakin bertambah
Pengaturan kecepatan pada motor arus searah dapat dilakukan dengan metode.. ward
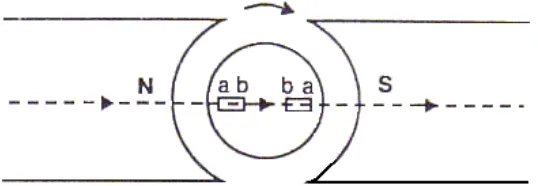
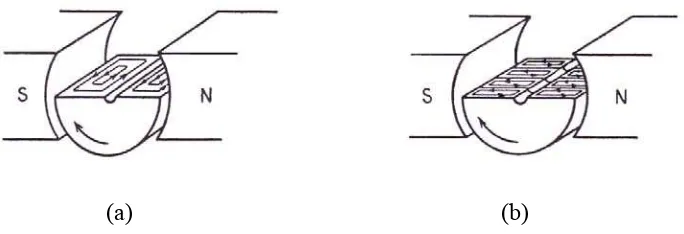
Pada tugas akhir ini, penulis menganalisa perbandingan kecepatan dan torsi motor arus searah shunt dan kompon akibat penambahan dan kutub pergeseran sikat..
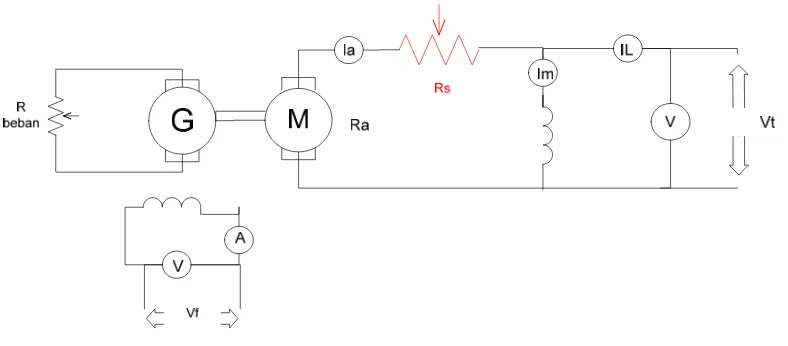
ANALISIS PERBANDINGAN PENGATURAN KECEPATAN DENGAN METODE FLUX MAGNET DAN METODE WARD LEONARD.. TERHADAP EFISIENSI PADA MOTOR
salah satu jenis motor listrik yang membutuhkan suplai tegangan arus searah pada.. kumparan medan dan kumparan jangkar untuk diubah menjadi energi
Metode Pengaturan Fluksi Terhadap Efisiensi Pada Motor Arus Searah Kompon”,.. Singuda
