Pengaruh Interaksi Gelombang – Arus untuk Perencanaan
Beban pada Tali Tambat Terminal Tanker FSO (Sebuah
Kajian Experimental)
Wibowo HN, Samudro
Marine Structural Monitoring / Hydroelasticity Group UPT - Balai Pengkajian Penelitian Hidrodinamika BPPT
Tlp (031)5948060 (B), 0817315759(HP), Fax: (031)5948066, e-mail: bowo02@yahoo.com
Jln Hidrodinamika (kampus ITS) Sukolilo Surabaya , Indonesia 60112
Abstrak
This experimental study shows the significance of the load induced by a wave – current interaction for the mooring system of a FSO Tanker. Three series of the model test was conducted at Towing Tank (TT) UPT BPPH (i) the model of FSO tanker was towed and simultaneously the wave was generated. This is to simulated the effect of wave – current interaction (ii) the model of FSO tanker was rest and the wave was generated to have the wave induced load alone (iii) the last is the FSO tanker model was towed to measure only the current load. The mooring lines on the ship model consist of 14 lines with 2 different materials. The portside consists of 6 horizontal lines that represent the 6 anchor chains. The starboard side consists of 8 lines that represent super line polyester ropes connected to the dolphin. The loads were irregular and acting on a tanker ship model for 8 weather directions i.e. N, NE, E, SE, S, SW, W, and NW. The tension in each line was measured using one component load transducer . Results from this three series TT experiment shows the maximum loads acting on the line occurs at wave – current interaction condition. This will be an importance information for the naval architect to determine the diameter, material and life time of the mooring system.
Keywords: tali tambat, catenary , rantai jangkar, tali polyester, tegangan tali, interaksi gelombang – arus, tanker
1. Pendahuluan
Dalam suatu perencanaan dari sistem tambat adalah umum untuk mendapatkan nilai tegangan tali tambat dengan perhitungan catenary secara statis. Hal ini , dengan kata lain diasumsikan bahwa kondisi tali tambat disetiap saat paling tidak mendekati kondisi kesetimbangan statis2,4. Seperti diketahui bahwa dalam beberapa kasus untuk struktur apung yang ditambat di laut terbuka untuk keperluan pengeboran atau konstruksi di laut asumsi kesetimbangan statis ini tak berlaku. Secara kenyataan adalah mungkin menunjukkan bahwa pada kondisi lingkungan laut yang tak beraturan tegangan maksimum tali bisa sebesar dua atau tiga kali dari yang didapat dengan perhitungan catenary secara statis. Sehingga data beban tambahan sangat diperlukan untuk memperbaiki prosedur perencanaan sistem tali tambat. Alasan dari kegagalan perhitungan Catenary untuk memberikan
jawaban yang benar adalah pada kondisi
lingkungan laut yang tak beraturan sehingga pengait tali tambat ( fairleader) juga mengalami gerakan yang besar pula. Hal ini dapat membuat asumsi kesetimbangan statis tak berlaku. Kecuali jika gerakan dari pengait tali tambat sangat kecil maka kesetimbangan statis masih bisa dipakai. Karena hal diatas perusahaan pemilik1 fasilitas tanker FSO memberikan pekerjaan pengujian model sistem tambat mereka ke UPT BPPH. Tujuan penulisan ini akan membahas bagaimana uji model dari sistem tambat kapal tanker FSO tersebut dilaksanakan dan menganalisa hasil dari tegangan tali tambat berkaitan dengan adanya interaksi antara gelombang – arus.
2.Dasar Teori
Sangat mudah untuk menunjukkan bagaimana gaya dinamis besar yang terjadi dapat mengakibatkan asumsi keseimbangan statis tidak bekerja. Seperti halnya terlihat pada Gambar 1, dimana perpindahan
yang kecil dari pengait tali tambat ”d” akan menyebabkan perpindahan melintang (transverse) yang besar ”C” pada bagian tengah tali jika
diasumsikan setiap saatnya diasumsikan
mengalami kesetimbangan statis. Perhitungan menunjukkan adalah biasa ratio ”C/d” yang terjadi sebesar 3 atau 4.
Gambar 1. Pengaruh dari perubahan kecil lokasi pengait tali tambat pada Geometri Tali Tambat
(Kesetimbangan Statis)
Walau dengan perpindahan kait ”d” yang cukup kecil pada beberapa kejadian periode gelombang sebagai misal 10 detik, maka kemudian dapat menyebabkan percepatan dan kecepatan yang besar. Hal ini tentunya akan menghasilkan gaya inersia dan hambatan. Pada saat gaya – gaya ini sangat besar dibanding gaya berat yang bekerja pada tali – tali tambat ( yang terkoreksi oleh gaya apungnya) maka asumsi kesetimbangan statis secara nyata kehilangan pengaruhnya. Sehingga osilasi tegangan tali yang lebih besar akan terjadi. Gaya - gaya inersia dan hambatan memamg keduanya dapat menjadi besar tetapi yang paling besar biasanya adalah gaya – gaya tahanan. Mereka dapat beberapa kali lebih besar daripada gaya berat yang bekerja pada tali. Secara ringkas, asumsi keseimbangan statis harus ditolak karena gaya – gaya dinamis yang besar mencegah tali tambat terjadinya kondisi sesaat catenary yang statis sehubungan dengan posisi pengait. Hal ini sering menyebabkan penambahan osilasi tegangan tali dan tegangan tali maksimum yang lebih tinggi. Pada penulisan ini benda apung yang ditambat adalah sebuah kapal tanker . Untuk menghitung gaya yang terjadi pada badan kapal tanker dapat digunakan persamaan distribusi tekanan karena interaksi arus – gelombang dari R. Zhao & O.M Faltinsen6 .persamaan (1) dibawah ini:
(1) (2) (3) (4) (5) (6)
)
(
)
(
.
2
.
2 2 2 3 2 1 1 1U
t
t
gz
P
s
s
a
dimana dua term terakhir dapat diabaikan dimana:
: kerapatan air
g : percepatan gravitasi
z : ketinggian dari permukaan air
s : potensial kecepatan dari arus
1 : potensial kecepatan dari gelombang untuk ordo 1
2 : potensial kecepatan dari gelombang untuk ordo 2
a : Amplitudo amplitude U : Kecepatan Arus
Distribusi tekanan di atas nantinya dapat dikalikan dengan luas permukaan basah untuk mendapatkan gaya yang bekerja kapal tanker. Untuk selanjutnya gaya tersebutlah yang akan terdistribusi ke tali - tali tambat yang menahan kapal tanker tersebut. Dengan memperhatikan persamaan di atas terdapat hubungan aljabar antara gelombang dan interaksi gelombang dan arus. Pada model test ini term (1), (2), (4) dan (5) berasal dari gelombang sedangkan term (3) dan (6) berasal dari interaksi gelombang – arus. Menarik untuk di amati bahwa kontribusi beban arus sendiri(tanpa gelombang) tidak tampak pada persamaan di atas. Akan tetapi dalam uji model nantinya akan dilihat seberapa besar pengaruhnya interaksi gelombang – arus terhadap beban yang ditimbulkan oleh arus dan gelombang itu sendiri. Sehingga pada uji model akan dilakukan pengujian (i) model kapal ditarik dengan diberi gelombang untuk mensimulasi kondisi interaksi gelombang arus (ii) model kapal diam dan hanya gelombang untuk mengetahui beban gelombang sendiri (iii) model kapal ditarik tanpa diberi gelombang untuk mengetahui beban arus itu sendiri 3. Metoda Pengujian
Ukuran utama dari kapal tanker ini sebagai berikut LPP = 256 M, B = 46.2 M, D = 23.8 M and T = 15.54 M. Dengan skala model 1:50. Konfigurasi dari sistem tambat yang diuji di tangki tarik (TT) diperlihatkan pada Gambar 2. Sistem tambat ini keseluruhannya terdiri dari 14 tali dimana dimodelkan dengan 14 pegas linear. Bagian
portside terdiri dari 6 tali mendatar yang mewakili
tali rantai jangkar. Perlu diketahui bahwa kekakuan pegas dan prategangannya merupakan komponen mendatar. Pada bagian starboard terdiri dari 8 tali yang mewakili tali superline polyesterside yang terhubungkan ke tiang pancang pengait (dolphin). Model kapal tanker FSO dibuat dari kayu dan sebelum uji model di tangki dilakukan model kapal ini disetimbangkan secara statis dan dinamis untuk mengetahui posisi ballast sehingga diketahui titik pusat massanya dan jari – jari girasinya. Hal ini dilakukan di di meja osilasi seperti yang diperlihatkan pada Gambar 3. Pengujian sistem tambat ini dilakukan di Tangki Tarik (TT). Untuk pengujian dengan gelombang tak beraturan (irregular wave) pada tangki tarik ini, gelombang tersebut dibangkitkan dengan pembuat gelombang ( wave maker) dengan melakukan berbagai gerakan translasi bolak – balik berdasrkan frekuensi yang diinginkan. Besarnya gerakan bolak – balik dan frekuensinya berhubungan dengan distribusi energi pada kondisi laut tak beraturan yang dihasilkan.
Gambar 2. Konfigurasi dari sistem tambat di Tangki Tarik (TT)
Gambar 3. Melakukan pengukuran parameter dinamis dari model tanker FSO di meja osilasi Dengan demikian kondisi laut yang acak yang terdapat pada lokasi sebenarnya dapat dibuat di kolam uji TT. Dimana terdapat didalamnya untuk setiap saat batas penuh dari frekuensi dengan distribusi energi yang sesuai dengan spektrum gelombangnya. Kondisi dari gelombang tak beraturan yang diinginkan diatur sebelum uji model dilakukan hal ini berlangsung selama 30 menit jika dalam kondisi skala sebenarnya. Hal ini dilakukan dengan mengukur tinggi gelombang pada posisi netral dari FSO dan pada sebuah titik acuan yang berbeda.Ketinggian gelombang diukur dengan alat pengukur gelombang tipe kawat tahanan ( resistance wire wave probes). Kondisi laut yang tak beraturan diatur agar distribusi kerapatan spektral sesuai dengan distribusi energi teoritis yang diinginkan. Spektrum gelombang yang dipakai pada uji model ini adalah gelombang spektrum Pierson-Moskowitz dengan Hs=2.63m, Tp=7.06 detik. Uji model ini terdiri dari tiga bagian. Yang pertama adalah mengetahui tegangan tali karena adanya beban gelombang tak beraturan itu sendiri. Kemudian yang kedua untuk mendapatkan tegangan tali karena interaksi gelombang – arus. Sedangkan yang terakhir adalah mengetahui besar tegangan tali akibat beban arus itu sendiri. Untuk test pada interaksi gelombang – arus, kereta penarik mulai berjalan saat gelombang telah mencapai model tanker FSO dan saat kereta telah mencapai kecepatan tetap yang diinginkan maka pengukuranpun dimulai. Fenomena transient
diharapkan telah hilang pada waktu percepatan dari kereta. Untuk mensimulasikan arus dapat dilakukan dengan menarik dari konfigurasi sistem tambat ini dengan kecepatan tetap yang diinginkan melalui penggunaan kereta. Hal ini diharapkan dapat menghasilkan medan arus yang homogen. Beban arus yang diukur di tangki tarik ini dihasilkan melalui penarikan kereta dengan kecepatan 0,16 m/s.
Selama masa percepatan dari kereta model tanker ini diarahkan secara manual untuk mencegah gerakan osilasi dari sistem tambat sekecil mungkin. Empat belas buah pengukur gaya dengan 1 komponen arah gaya dipasang untuk sistem tambat pada model kapal ini. Sehingga setiap tali terpasang satu pengukur gaya. Arah dari pengukur gaya adalah sama dengan tali tambat yang terpasang pada model tanker FSO ini. Arah beban arus dan gelombang terhadap model kapal sesuai
dengan delapan arah penjuru mata angin
diperlihatkan pada Gambar 5. Untuk
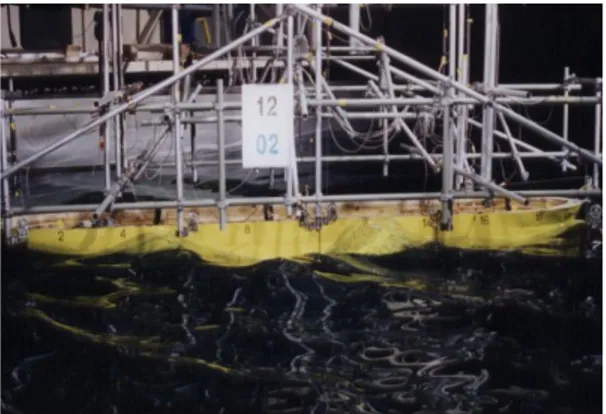
mensimulasikan arah pembebanan ini digunakan semacam lengan pemutar model kapal hasil rancangan tim UPT – BPPH yang dipasangkan pada kereta. Salah satu uji model dengan arah
pembebanan (1350 ) gelombang – arus
diperlihatkan pada Gambar 5. Selama uji model berlangsung pengukuran terhadap tegangan tali dari ke 14 tali tambat tersebut dilakukan untuk selang waktu yang cukup ntuk mendapatkan nilai rata – rata yang teliti.
Gambar 4. Delapan arah pembebanan sistem tali tambat
Gambar 5. Pembebanan 1350 gelombang - arus di Tangki Tarik ( TT )
4. Analisa Hasil dan Kesimpulan
Hasil dari pengukuran tegangan tali (Ton) ditampilkan pada Tabel 1 dan 2 merupakan besaran skala penuh yang terjadi pada sistem tali tambat dengan menggunakan persamaan berikut:
m s m s
F
F
3.
( 2 )dimana subkrip s adalah untuk kapal sebenarnya dan m untuk model sedangkan adalah skala model. Tabel – tabel tersebut menunjukkan besarnya gaya yang terjadi di setiap tali tambat untuk delapan arah pembebanan gelombang dan arus yaitu 0, 45, 90, 135, 180, 225, 270 dan 315. Pada tabel ini ditampilkan besar gaya yang terjadi karena gelombang itu sendiri dan juga hasil pengukuran gaya dari interaksi gelombang – arus. Selisih dari kedua kondisi pembebanan tersebut juga ditampilkan. Perbedaan hasil pengukuran tegangan tali dalam kondisi beban gelombang murni dengan interaksi gelombang – arus yang diperlihatkan pada Tabel 1 di bawah ini tidak selalu positip. Ada kecendrungan dari tegangan tali terutama pada arah (heading) 90 derajat (8 tali dari 14 buah tali ) dan 270 derajat (9 tali dari 14 buah tali ) berkurang saat terkena arus. Hal ini terjadi kemungkinan besar karena adanya vortex
shedding karena gerakan model kapal tanker yang
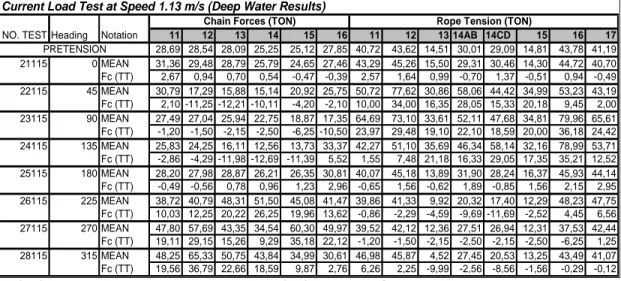
tidak dengan mudah kembali ke kapal tetapi ikut hanyut bersama arus yang mana hal ini tak terjadi pada uji dengan kondisi gelombang saja. Beban arus sendiri yang terjadi pada keempatbelas tali
tersebut diperlihatkan pada Tabel 2. Menarik untuk
diamati pertama adalah tegangan tali karena beban arus juga tidak selalu positip, hal ini adalah wajar
terutama pada posisi tali yang berlawanan dengan arah arus. Sebagai contoh bila arah beban arus mengenai sisi starboard kapal di harapkan sisi portside kapal akan mengalami pengenduran atau negatip value. Hal kedua adalah selisih beban dari kondisi beban interaksi gelombang- arus(Fwc) terhadap kondisi beban gelombang(Fw) itu sendiri tidak sama dengan beban arus (Fc) itu sendiri. Atau secara matematis dapat diperlihatkan pada pertidaksamaan di bawah ini:
Fc
Fw
-Fwc
(3)Hal ini dapat dijelaskan berdasarkan persamaan (1) dimana beban arus tidak berdiri sendiri tetapi terpengaruh oleh gelombang (term(3) dan (6)). Pengetahuan tentang adanya persamaan (3) adalah penting bagi seorang insinyur perencana dalam menentukan kondisi beban yang teliti pada sistem tali tambatnya pada daerah yang bergelombang dan arus. Secara umum dapat dikatakan bahwa dari Tabel 1 dan 2 bahwa tegangan tali maksimum terjadi pada kondisi interaksi arus – gelombang di banding kedua kondisi yang lain sehingga oleh insinyur perencana sebaiknya menentukan jenis material , diameter dan umur dari sistem tambat tersebut pada kondisi tersebut.
Daftar Pustaka
1. LHI Report No :LHI/064/III/2004,” Model Test of Oil/Condensate FSO for Betara Field Development”.
2. Priyanto A, Samudro,” Analisa
Prategangan – Defleksi pada Sistem Tambat Katenari Terminal Apung di Pesisir Jambi”, Sem Nas ”Peran
Perguruan Tinggi dalam Upaya
Pemberdayaan Masyarakat Pesisir, UHT(2005)
3. Rules & Guidelines (2003)
Germanischer Lloyd part III Offshore Technology
4. SeaTek Corp, “ DESIGN OF MOORING
SYSTEMS, (1982)
5. Wibowo H.N, O, Samudro,” On The Fatigue Analysis of Mooring Lines in Irregular Wave”, Published and Presented for 4th Regional Conference of Marine Technology 2004,on 7 & 8 September 2004 at Johor, Malaysia( Joint Authorship with O.Samudro)
6. Zhao, R. and Faltinsen, O.R.
(1990),”Interaction between Current, Waves and Marine Structure”, Proc, Fifth Int. Conference on Numerical Ship Hydrodynamics, p513-527.
RIWAYAT PENULIS
Wibowo H. Nugroho, lahir di Jakarta, tahun1967, lulus Sarjana Teknik Perkapalan (Ir/1990) dari Institut Teknologi Sepuluh Nopember (ITS) Surabaya, Msc (1994) di bidang Engineering
Mathematics, dari University of Newcastle, Newcastle Upon Tyne, The United Kingdom. Dan
PhD (2002) di bidang Smart Structure / Mechanical
Engineering, Monash University ,Melbourne,
Australia. Saat ini bekerja sebagai Perekayasa pada divisi Penelitian dan Pengembangan untuk Hidroelastisitas/Marine Structural Monitoring pada
UPT Balai Pengkajian dan Penelitian
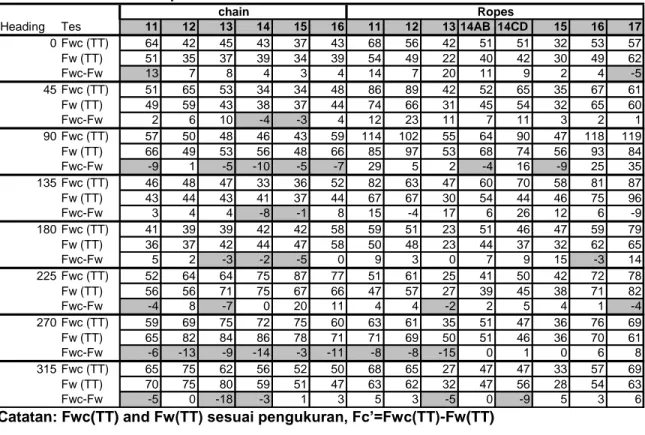
Tabel 1. Hasil pengukuran tegangan tali dalam kondisi beban gelombang murni dan interaksi gelombang - arus
MOORED CONDENSATE FSO TERMINAL
Current effect relationship in TT Calculation Sheet
Heading Tes 11 12 13 14 15 16 11 12 13 14AB 14CD 15 16 17
0 Fwc (TT) 64 42 45 43 37 43 68 56 42 51 51 32 53 57 Fw (TT) 51 35 37 39 34 39 54 49 22 40 42 30 49 62 Fwc-Fw 13 7 8 4 3 4 14 7 20 11 9 2 4 -5 45 Fwc (TT) 51 65 53 34 34 48 86 89 42 52 65 35 67 61 Fw (TT) 49 59 43 38 37 44 74 66 31 45 54 32 65 60 Fwc-Fw 2 6 10 -4 -3 4 12 23 11 7 11 3 2 1 90 Fwc (TT) 57 50 48 46 43 59 114 102 55 64 90 47 118 119 Fw (TT) 66 49 53 56 48 66 85 97 53 68 74 56 93 84 Fwc-Fw -9 1 -5 -10 -5 -7 29 5 2 -4 16 -9 25 35 135 Fwc (TT) 46 48 47 33 36 52 82 63 47 60 70 58 81 87 Fw (TT) 43 44 43 41 37 44 67 67 30 54 44 46 75 96 Fwc-Fw 3 4 4 -8 -1 8 15 -4 17 6 26 12 6 -9 180 Fwc (TT) 41 39 39 42 42 58 59 51 23 51 46 47 59 79 Fw (TT) 36 37 42 44 47 58 50 48 23 44 37 32 62 65 Fwc-Fw 5 2 -3 -2 -5 0 9 3 0 7 9 15 -3 14 225 Fwc (TT) 52 64 64 75 87 77 51 61 25 41 50 42 72 78 Fw (TT) 56 56 71 75 67 66 47 57 27 39 45 38 71 82 Fwc-Fw -4 8 -7 0 20 11 4 4 -2 2 5 4 1 -4 270 Fwc (TT) 59 69 75 72 75 60 63 61 35 51 47 36 76 69 Fw (TT) 65 82 84 86 78 71 71 69 50 51 46 36 70 61 Fwc-Fw -6 -13 -9 -14 -3 -11 -8 -8 -15 0 1 0 6 8 315 Fwc (TT) 65 75 62 56 52 50 68 65 27 47 47 33 57 69 Fw (TT) 70 75 80 59 51 47 63 62 32 47 56 28 54 63 Fwc-Fw -5 0 -18 -3 1 3 5 3 -5 0 -9 5 3 6 chain Ropes
Table 2
,
Hasil pengukuran tegangan tali dalam kondisi beban arusCurrent Load Test at Speed 1.13 m/s (Deep Water Results)
Heading Notation 11 12 13 14 15 16 11 12 13 14AB 14CD 15 16 17
28,69 28,54 28,09 25,25 25,12 27,85 40,72 43,62 14,51 30,01 29,09 14,81 43,78 41,19 21115 0 MEAN 31,36 29,48 28,79 25,79 24,65 27,46 43,29 45,26 15,50 29,31 30,46 14,30 44,72 40,70 Fc (TT) 2,67 0,94 0,70 0,54 -0,47 -0,39 2,57 1,64 0,99 -0,70 1,37 -0,51 0,94 -0,49 22115 45 MEAN 30,79 17,29 15,88 15,14 20,92 25,75 50,72 77,62 30,86 58,06 44,42 34,99 53,23 43,19 Fc (TT) 2,10 -11,25 -12,21 -10,11 -4,20 -2,10 10,00 34,00 16,35 28,05 15,33 20,18 9,45 2,00 23115 90 MEAN 27,49 27,04 25,94 22,75 18,87 17,35 64,69 73,10 33,61 52,11 47,68 34,81 79,96 65,61 Fc (TT) -1,20 -1,50 -2,15 -2,50 -6,25 -10,50 23,97 29,48 19,10 22,10 18,59 20,00 36,18 24,42 24115 135 MEAN 25,83 24,25 16,11 12,56 13,73 33,37 42,27 51,10 35,69 46,34 58,14 32,16 78,99 53,71 Fc (TT) -2,86 -4,29 -11,98 -12,69 -11,39 5,52 1,55 7,48 21,18 16,33 29,05 17,35 35,21 12,52 25115 180 MEAN 28,20 27,98 28,87 26,21 26,35 30,81 40,07 45,18 13,89 31,90 28,24 16,37 45,93 44,14 Fc (TT) -0,49 -0,56 0,78 0,96 1,23 2,96 -0,65 1,56 -0,62 1,89 -0,85 1,56 2,15 2,95 26115 225 MEAN 38,72 40,79 48,31 51,50 45,08 41,47 39,86 41,33 9,92 20,32 17,40 12,29 48,23 47,75 Fc (TT) 10,03 12,25 20,22 26,25 19,96 13,62 -0,86 -2,29 -4,59 -9,69 -11,69 -2,52 4,45 6,56 27115 270 MEAN 47,80 57,69 43,35 34,54 60,30 49,97 39,52 42,12 12,36 27,51 26,94 12,31 37,53 42,44 Fc (TT) 19,11 29,15 15,26 9,29 35,18 22,12 -1,20 -1,50 -2,15 -2,50 -2,15 -2,50 -6,25 1,25 28115 315 MEAN 48,25 65,33 50,75 43,84 34,99 30,61 46,98 45,87 4,52 27,45 20,53 13,25 43,49 41,07 Fc (TT) 19,56 36,79 22,66 18,59 9,87 2,76 6,26 2,25 -9,99 -2,56 -8,56 -1,56 -0,29 -0,12 PRETENSION
Chain Forces (TON) Rope Tension (TON)
NO. TEST