2. TEORI BALOK TIMOSHENKO
2.1. Teori Balok Timoshenko
Teori balok Euler-Bernoulli merupakan teori balok yang paling umum digunakan, teori ini disebut juga teori balok klasik. Teori ini memiliki asumsi dasar dimana setelah terjadi lendutan (akibat gaya luar ataupun berat sendiri), bidang datar pada penampang balok yang berarah normal pada garis netralnya tetaplah merupakan suatu bidang datar yang berarah normal terhadap garis netralnya. Dalam asumsi balok Euler-Bernoulli, bidang datar penampang dapat berarah normal terhadap garis netralnya karena regangan geser (γxz) diasumsikan dapat diabaikan sehingga nilainya dianggap nol, sehingga θ dianggap sama dengan 𝑑𝑤
𝑑𝑥. Hal ini terjadi karena saat terjadi lendutan pada balok yang tipis dan panjang dengan perbandingan antara panjang dan tingginya kecil momen lenturnya lebih dominan.
Namun hal tersebut tidak berlaku untuk balok tinggi dengan perbandingan antara panjang dan tingginya besar, dimana lendutan yang terjadi lebih dominan disebabkan oleh gaya geser. Dalam beberapa kasus seperti ini, teori Euler-Bernoulli kurang tepat untuk digunakan.
Gambar 2.1. Teori balok Timoshenko Sumber: Sulistio (2014, p. 17)
Menurut Reddy (2006), teori balok Timoshenko mempunyai asumsi dasar bahwa bidang datar tetap datar setelah mengalami lendutan tetapi tidak perlu berarah normal terhadap garis netralnya (Sulistio, 2014). Oleh karena itu, maka regangan geser (γxz) dalam balok Timoshenko juga diperhitungkan, dan membuat teori balok Timoshenko dapat digunakan untuk semua jenis balok. Untuk lebih jelasnya, dapat dilihat pada gambar 2.1.
2.2. Persamaan Umum Balok Timoshenko
Balok Timoshenko yang ditinjau mempunyai modulus elastisitas E dan modulus geser G. Balok Timoshenko ini memiliki panjang L, momen inersia I, dan luas efektif geser 𝐴𝑠. Luas efektif geser adalah luas penampang A dikalikan dengan faktor koreksi geser k. Balok ini dibebani gaya luar berupa beban merata q. Menurut teori balok Timoshenko, akibat gaya luar balok mengalami perpindahan (w) dan rotasi (θ) seperti terlihat pada gambar 2.2.
Gambar 2.2. Koordinat sistem dan arah positif untuk lendutan dan rotasi Sumber: Sulistio (2014, p. 19)
Dalam teori balok Timoshenko, kita meninjau perpindahan (displacement) hanya untuk arah x dan arah z, sedangkan untuk arah y nilainya tidak ditinjau. Perpindahan untuk arah x (u) dan perpindahan untuk arah z (w) dapat ditulis:
u = -z(x) (2.1a)
w = w(x) (2.1b)
dimana: w = perpindahan tranversal dari sumbu netral
= rotasi dari penampang balok
Komponen regangan yang tidak nol ditentukan berdasarkan menurunkan persamaan (2.1a) dan (2.1b) sebagai berikut:
𝜀𝑥𝑥 = 𝑑𝑢𝑑𝑥 = −𝑧𝑑𝜃𝑑𝑥= −𝑧𝜃,𝑥 (2.2a) 𝛾𝑥𝑧 = 𝑑𝑤
𝑑𝑥+𝑑𝑢
𝑑𝑧 =𝑑𝑤
𝑑𝑥− 𝜃 = 𝑤′𝑥− 𝜃 (2.2b) dimana: 𝜀𝑥𝑥 = regangan akibat momen lentur
𝛾𝑥𝑧 = regangan akibat gaya geser Adapun 𝑑𝜃
𝑑𝑥 adalah kurvatur (), sehingga persamaan (2.2a) juga dapat ditulis menjadi = -z .
Regangan dan tegangan dihubungkan dengan modulus Young (E) untuk lentur dan modulus geser (G) untuk geser.
Hukum Hooke menunjukkan adanya hubungan yang linear antara regangan lentur dan tegangan lentur dinyatakan dengan:
𝜎 = 𝐸 𝜀 (2.3a)
Sedangkan, hubungan regangan geser dan tegangan geser dinyatakan dengan:
𝜏 = 𝐺 𝛾 (2.3b)
Momen lentur M dan gaya geser Q didapat dari kurvatur 𝜃′𝑥 dan regangan geser 𝛾, dirumuskan:
𝑀 = 𝐸 𝐼 𝜃′𝑥 (2.4a)
𝑄 = 𝐺 𝐴𝑠 𝛾 (2.4b)
Berdasarkan Teori balok Timoshenko, didapatkan governing equation sebagai berikut:
𝑑
𝑑𝑥[𝐺𝐴𝑠(𝑤′𝑥− 𝜃)] + 𝑞 = 0 (2.5a)
𝑑
𝑑𝑥(𝐸𝐼𝜃′𝑥) + 𝐺𝐴𝑠(𝑤′𝑥− 𝜃) = 0 (2.5b) Persamaan (2.5a) dan persamaan (2.5b) digunakan untuk mendapatkan perpindahan (w) dan rotasi (θ). Namun, cara analitik ini dianggap tidak efisien untuk diterapkan dalam kasus-kasus yang kompleks, sehingga dibentuk persamaan pendekatan.
Persamaan kesetimbangan balok dapat dibentuk melalui Principal of Virtual Displacement sebagai berikut:
𝛿𝑈 = 𝛿𝑊 (2.6)
dimana: U = energi regangan (strain) virtual dari tekanan internal.
W = usaha virtual dari gaya luar pada balok.
Untuk energi regangan (strain energy) besar nilainya dirumuskan sebagai:
𝛿𝑈 = 𝛿𝑈𝑏 + 𝛿𝑈𝑠 (2.7)
dimana: Ub = energi regangan virtual dari tekanan internal yang diakibatkan oleh momen lentur (bending).
Us = energi regangan virtual dari tekanan internal yang diakibatkan oleh gaya geser (shear).
Energi regangan yang diakibatkan oleh momen lentur:
𝛿𝑈𝑏 = ∫ 𝛿𝜃0𝐿 ′𝑥𝑀 𝑑𝑥= ∫ 𝛿𝜃0𝐿 ′𝑥𝐸𝐼𝜃′𝑥𝑑𝑥 (2.8a) Energi regangan yang diakibatkan oleh gaya geser:
𝛿𝑈𝑠 = ∫ 𝛿𝛾𝑄 𝑑𝑥0𝐿 = ∫ (𝛿𝑤0𝐿 ′𝑥− 𝛿𝜃)𝐺𝐴𝑠(𝑤′𝑥 − 𝜃)𝑑𝑥 (2.8b) Usaha virtual dari gaya luar:
𝛿𝑊 = ∫ 𝛿𝑤𝑞 𝑑𝑥0𝐿 (2.9)
Sehingga persamaan kesetimbagan balok menjadi,
∫ 𝛿𝜃0𝐿 ′𝑥𝐸𝐼𝜃′𝑥𝑑𝑥 + ∫ (𝛿𝑤0𝐿 ′𝑥− 𝛿𝜃)𝐺𝐴𝑠(𝑤′𝑥− 𝜃)𝑑𝑥= ∫ 𝛿𝑤𝑞 𝑑𝑥0𝐿 (2.10)
2.3. Perumusan Interpolasi Kriging
Teknik Interpolasi Kriging adalah teknik geostatistik yang populer digunakan untuk interpolasi di dalam ilmu geologi dan pertambangan (Tongsuk and Kanok- Nukulchai, 2004a; Gu, 2003; Olea, 1999, p. 8 seperti dikutip dalam Sulistio, 2014).
Teknik ini ditemukan oleh seorang insiyur pertambangan Afrika Selatan bernama Danie G. Krige. Dengan menggunakan interpolasi ini, kita dapat mengetahui titik- titik lain yang tidak diketahui dengan interpolasi dari titik-titik yang telah diketahui di sekitarnya.
Dalam sebuah masalah domain 1 dimensi Ω seperti terlihat pada Gambar 2.3, terdapat sejumlah titik – titik 𝑥𝐼, I=1, 2, …, N, dimana N merupakan jumlah dari
titik – titik nodal di sepanjang domain tersebut dan fungsi dari nilai 𝑥𝐼 tersebut dapat dinyatakan sebagai u(𝑥𝐼).
Gambar 2.3. Domain 1 dimensi dengan subdomain 2 lapis elemen Sumber: Wong et al. (2016, p. 4)
Dalam metode Kriging, uh(x) merupakan nilai estimasi dari penjumlahan linier semua titik nodal sepanjang domain tersebut, sehingga dapat ditulis sebagai berikut:
uh(x) = ∑𝑛𝑖=1𝜆𝑖𝑢(xi) (2.11) λi adalah Kriging weights dan n adalah jumlah titik nodal dari titik x dalam subdomain Ωx Ω, n N. Huruf i dan n digunakan sama seperti I dan N tetapi digunakan untuk menunjukkan penomoran pada sistem lokal/subdomain.
Subdomain Ωx di metode elemen hingga terdiri dari elemen dari titik yang ditinjau dan beberapa lapis elemen di sekitarnya yang disebut Domain of Influence (DOI).
Perumusan sistem persamaan Kriging untuk mendapatkan λi adalah sebagai berikut:
R λ + P μ = r(x) (2.12a)
PT λ = p(x) (2.12b)
dimana:
𝑹 = [
𝐶(ℎ11) … 𝐶(ℎ1𝑛)
… … …
𝐶(ℎ𝑛1) … 𝐶(ℎ𝑛𝑛)
] ; 𝑷 = [
𝑝1(𝑥1) … 𝑝𝑚(𝑥1)
… … …
𝑝1(𝑥𝑛) … 𝑝𝑚(𝑥𝑛)
] (2.12c)
= [1 … 𝑛]𝑇 ; = [1 … 𝑚]𝑇 (2.12d) 𝒓(𝑥) = [𝐶(ℎ1𝑥) 𝐶(ℎ2𝑥) … 𝐶(ℎ𝑛𝑥)]𝑇 (2.12e) 𝒑(𝑥) = [𝑝1(𝑥) … 𝑝𝑚(𝑥)]𝑇 (2.12f)
Matriks R, C(hij), adalah matriks kovarian berdimensi n x n antara U(xi) dan U(xj), i = 1, … , n; j = 1, … , n. Huruf U menunjukkan nillai dari fungsi u(x) yang sudah ditentukan. Matriks P adalah matriks berdimensi n x m, m adalah monomial terms.
Vektor λ adalah vektor n x 1 dari Kriging weights dan vektor adalah vektor m x 1 dari vektor pengali Lagrange. Vektor r(x), C(hix), adalah vektor kovarian berdimensi n x 1 antara titik nodal U(xi) dan titik yang ditinjau U(x), dengan fungsi hix = x - xi. Vektor p(x) adalah vektor berdimensi m x 1 dari nilai monomial di titik x. Syarat mutlak agar persamaan Kriging dapat diselesaikan yaitu jumlah titik nodal yang terdapat di dalam DOI (n) harus sama atau lebih besar daripada jumlah dari monomial terms (m), n m. Monomial terms dapat didapatkan berdasarkan dari polynomial basis. Berdasarkan polynomial basis juga, kita bisa mendapatkan jumlah lapisan minimumnya yang dapat dilihat pada Tabel 2.1.
Tabel 2.1. Tabel Polynomial Basis, Monomial Terms, m, dan Jumlah Lapisan Minimum
Polynomial Basis Monomial Terms m Jumlah Lapisan Minimum
Linear 1 x 2 1
Quadratic 1 x x2 3 2
Cubic 1 x x2 x3 4 3
Sumber: Wong et al. (2016, p. 5)
Perumusan dari nilai estimasi uh dalam bentuk matriks:
uh(x) = Td = N(x)d (2.13) dimana 𝒅 = [𝑢(𝑥1) … 𝑢(𝑥𝑛)]𝑇 adalah vektor n x 1 dari nilai titik nodal dan N(x)=T adalah matriks dari shape function Kriging. Demikian, Kriging weights adalah shape function dari Kriging.
Dalam pembentukan shape function Kriging dibutuhkan fungsi korelasi.
Fungsi korelasi didefinisikan sebagai berikut:
𝜌(ℎ) = 𝐶(ℎ)
𝜎2 (2.14)
Menurut Gu (2003), nilai 2 tidak memiliki pengaruh pada hasil akhir sehingga dalam tugas akhir ini dipakai nilai satu (Sulistio, 2014).
Dalam studi ini dipilih 2 jenis fungsi korelasi yaitu fungsi korelasi Gauss dan Quartic Spline. Fungsi korelasi Gauss dan Quartic Spline dapat dirumuskan:
𝜌(ℎ) = exp (− (𝜃𝑟ℎ
𝑑)2) (2.15a)
𝜌(ℎ) = {1 − 6 (𝜃𝑟ℎ
𝑑)2+ 8 (𝜃𝑟ℎ
𝑑)3− 3 (𝜃𝑟ℎ
𝑑)4 for 0 ≤ 𝜃𝑟ℎ
𝑑 ≤ 1 0 for 𝜃𝑟ℎ
𝑑> 1
(2.15b) dimana h adalah jarak antara 2 titik nodal, d adalah jarak maksimum dari pasangan- pasangan titik nodal di DOI, dan 𝜃𝑟 > 0 adalah parameter korelasi yang menentukan nilai dari shape function Kriging. Demikian, 𝜃𝑟 mempunyai batasan nilai bawah dan nilai atas menurut polynomial basis dan jumlah lapisan yang digunakan, sehingga disarankan untuk menggunakan nilai rata-ratanya seperti pada Tabel 2.2.
Tabel 2.2. Besar 𝜃𝑟 Menurut Polynomial Basis dan Jumlah Lapisannya Polynomial
Basis
Jumlah Lapisan
Gauss Quartic Spline
Batas Bawah
Batas Atas
Rata- Rata
Batas Bawah
Batas Atas
Rata- Rata
Linear
1 0 0.2295 0.1148 0 0.098 0.049
2 10-4 1.0 0.500 10-5 0.44 0.220
3 10-4 1.9 0.950 10-5 0.86 0.430
Quadratic 2 10-4 1.0 0.500 10-5 0.44 0.220
3 10-4 1.9 0.950 10-6 0.86 0.430
Cubic 3 10-4 1.9 0.950 10-4 0.86 0.430
Sumber: Wong et al. (2016, p. 7)
Contoh perhitungan interpolasi kriging
Suatu elemen balok dengan bentang 10 m, dibagi menjadi 8 elemen seperti pada Gambar 2.4. Elemen yang ditinjau adalah elemen ke-3 yang berada di antara titik nodal 3 dan titik nodal 4. Pada elemen ini akan dicari shape function Kriging pada titik nodal 3 dan 4, serta pada titik tengah elemen yang ditinjau, dengan menggunakan:
Polynomial basis: Quadratic
Fungsi korelasi: Quartic Spline
Jumlah lapisan dalam DOI: 2 lapis
Gambar 2.4. Elemen balok dengan bentang 10 m
Berdasarkan data-data di atas, kita bisa mendapatkan nilai:
m = 3 (Tabel 2.1)
𝜃𝑟 = 0.22 (Tabel 2.2)
d = 3.75 m
Berdasarkan persamaan (2.15b), nilai R dan r(x) menjadi:
𝐑 = [
1.0000 0.9708 0.8948 0.7877 0.9708 1.0000 0.9708 0.8948 0.8948 0.9708 1.0000 0.9708 0.7877 0.8948 0.9708 1.0000
], 𝐫(𝑥) = [
0.9708 0.9376 0.8948 1.0000 0.9923 0.9708 0.9708 0.9923 1.0000 0.8948 0.9376 0.9708
]
Berdasarkan Tabel 2.1. didapatkan nilai P dan p(x):
𝐏 = [
1.0000 0 0
1.0000 1.2500 1.5625 1.0000 2.5000 6.2500 1.0000 3.7500 14.0625
], 𝐩(𝑥) = [
1.0000 1.0000 1.0000 1.2500 1.8750 2.5000 1.5625 3.5156 6.2500
]
Dengan membuat persamaan (2.12a) dan (2.12b) dalam bentuk matriks:
[
1.0000 0.9708 0.8948 0.7877 0.9708 1.0000 0.9708 0.8948 0.8948 0.9708 1.000 0.9708 0.7877 0.8948 0.9708 1.0000
1.0000 0.0000 0.0000 1.0000 1.2500 1.5625 1.0000 2.5000 6.2500 1.0000 3.7500 14.0625 1.0000 1.0000 1.0000 1.0000
0.0000 1.2500 2.5000 3.7500 0.0000 1.5625 6.2500 14.0625
0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 ]
[𝝀 𝝁] =
[
0.9708 0.9376 0.8948 1.0000 0.9923 0.9708 0.9708 0.9923 1.0000 0.8948 0.9376 0.9708 1.0000 1.0000 1.0000 1.2500 1.8750 2.5000 1.5625 3.5156 6.2500]
maka didapatkan nilai dan sebesar:
𝝀 = [
0.0000 −0.0625 0.0000 1.0000 0.5625 0.0000 0.0000 0.5625 1.0000 0.0000 −0.0625 0.0000
] , 𝛍 = [
0.0000 0.0000 0.0000 0.0000 0.0005 0.0000 0.0000 −0.0001 0.0000
]
2.4. Perumusan Balok Timoshenko untuk Metode Elemen Hingga Berbasis Kriging
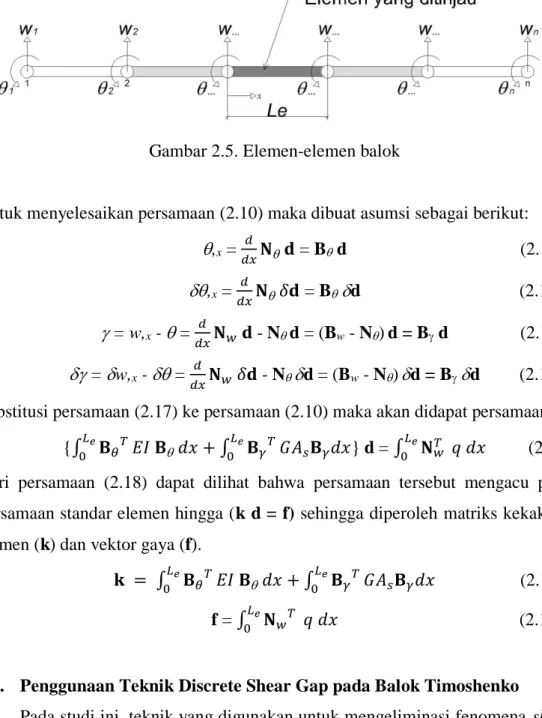
Jika ditinjau suatu elemen seperti pada gambar 2.5 maka asumsi fungsi perpindahan pada elemen ini dapat dituliskan sebagai:
w = 𝐍𝑤(x) d (2.16a)
= 𝐍𝜃(x) d (2.16b) dimana:
𝐍𝑤 = [𝑁1(𝑥) 0 𝑁2(𝑥) 0 … 𝑁𝑛(𝑥) 0] (2.16c) 𝐍𝜃 = [0 𝑁1(𝑥) 0 𝑁2(𝑥) … 0 𝑁𝑛(𝑥)] (2.16d) d = {𝑤1 1 𝑤2 2 … 𝑤𝑛 𝑛}𝑇 (2.16e)
Shape function (N) yang digunakan adalah shape function dari Kriging seperti dalam persamaan (2.13).
Gambar 2.5. Elemen-elemen balok
Untuk menyelesaikan persamaan (2.10) maka dibuat asumsi sebagai berikut:
,x = 𝑑
𝑑𝑥𝐍 𝐝 = B d (2.17a)
,x = 𝑑
𝑑𝑥𝐍 𝛿𝐝 = B d (2.17b)
= w,x - = 𝑑
𝑑𝑥𝐍𝑤 𝐝 - N d = (Bw - N)d = B d (2.17c)
= w,x - = 𝑑
𝑑𝑥𝐍𝑤 𝛿𝐝 - N d = (Bw - N)d = B d (2.17d) Substitusi persamaan (2.17) ke persamaan (2.10) maka akan didapat persamaan:
{∫ 𝐁0𝐿𝑒 𝜃𝑇𝐸𝐼 𝐁 𝑑𝑥 + ∫ 𝐁0𝐿𝑒 𝛾𝑇𝐺𝐴𝑠𝐁𝛾𝑑𝑥} d = ∫ 𝐍0𝐿𝑒 𝑤𝑇 𝑞 𝑑𝑥 (2.18) Dari persamaan (2.18) dapat dilihat bahwa persamaan tersebut mengacu pada persamaan standar elemen hingga (k d = f) sehingga diperoleh matriks kekakuan elemen (k) dan vektor gaya (f).
𝐤 = ∫ 𝐁𝐿𝑒 𝜃𝑇
0 𝐸𝐼 𝐁 𝑑𝑥 + ∫ 𝐁𝐿𝑒 𝛾𝑇
0 𝐺𝐴𝑠𝐁𝛾𝑑𝑥 (2.19a) f = ∫ 𝐍0𝐿𝑒 𝑤𝑇 𝑞 𝑑𝑥 (2.19b)
2.5. Penggunaan Teknik Discrete Shear Gap pada Balok Timoshenko
Pada studi ini, teknik yang digunakan untuk mengeliminasi fenomena shear locking adalah teknik DSG. Menurut Wong & Syamsoeyadi (2011), shear locking adalah fenomena dimana elemen balok sangat kaku pada saat ketebalan balok sangat tipis. Teknik DSG ini bertujuan untuk mensubstitusi regangan geser balok Timoshenko dengan regangan geser yang didapat dari mendiferensialkan fungsi DSG (Bischoff et al., 2003; Bletzinger et al., 2000). Persamaan deformasi geser dapat diperoleh dari mengintegralkan persamaan (2.2b).
𝑤(𝑥) = ∫𝑥𝑥
0 𝑑𝑥 = 𝑤|𝑥𝑥0 − ∫𝑥𝑥 𝑑𝑥
0 (2.20a)
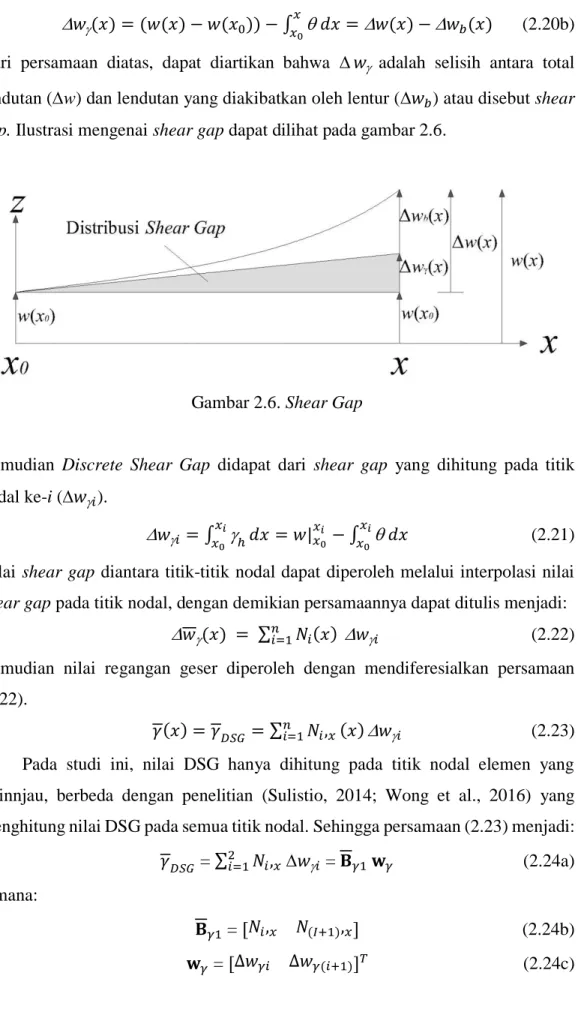
𝑤(𝑥) = (𝑤(𝑥) − 𝑤(𝑥0)) − ∫𝑥𝑥 𝑑𝑥
0 = 𝑤(𝑥) −𝑤𝑏(𝑥) (2.20b) Dari persamaan diatas, dapat diartikan bahwa 𝑤 adalah selisih antara total lendutan (w) dan lendutan yang diakibatkan oleh lentur (𝑤𝑏) atau disebut shear gap. Ilustrasi mengenai shear gap dapat dilihat pada gambar 2.6.
Gambar 2.6. Shear Gap
Kemudian Discrete Shear Gap didapat dari shear gap yang dihitung pada titik nodal ke-i (𝑤𝑖).
𝑤𝑖= ∫𝑥𝑥𝑖ℎ
0 𝑑𝑥 = 𝑤|𝑥𝑥0𝑖 − ∫𝑥𝑥𝑖 𝑑𝑥
0 (2.21)
Nilai shear gap diantara titik-titik nodal dapat diperoleh melalui interpolasi nilai shear gap pada titik nodal, dengan demikian persamaannya dapat ditulis menjadi:
𝑤(𝑥) = ∑𝑛𝑖=1𝑁𝑖(𝑥) 𝑤𝑖 (2.22) Kemudian nilai regangan geser diperoleh dengan mendiferesialkan persamaan (2.22).
𝛾(𝑥) = 𝛾𝐷𝑆𝐺 = ∑𝑛𝑖=1𝑁𝑖,𝑥(𝑥)𝑤𝑖 (2.23) Pada studi ini, nilai DSG hanya dihitung pada titik nodal elemen yang ditinnjau, berbeda dengan penelitian (Sulistio, 2014; Wong et al., 2016) yang menghitung nilai DSG pada semua titik nodal. Sehingga persamaan (2.23) menjadi:
𝛾𝐷𝑆𝐺 = ∑2𝑖=1𝑁𝑖,𝑥 𝑤𝑖 = 𝐁𝛾1 𝐰𝛾 (2.24a) dimana:
𝐁𝛾1 = [𝑁𝑖,𝑥 𝑁(𝐼+1),𝑥] (2.24b) 𝐰𝛾 = [∆𝑤𝛾𝑖 ∆𝑤𝛾(𝑖+1)]𝑇 (2.24c)
Dengan mensubstitusi persamaan (2.15b) ke persamaan (2.21) maka akan didapat persamaan:
𝑤𝑖 = 𝑤𝑖 - 𝑤1 – (∫ 𝐍𝑥𝑥𝑖 𝜃(𝑥) 𝑑𝑥
0 ) d (2.25)
Sehingga persamaan (2.24c) dapat menjadi:
𝐰𝛾 = 𝐁𝛾2 d (2.26a)
dimana:
𝐁𝛾2= [
0 0 0 0 0 0 ⋯ 0 0
−1 − ∫ 𝑁𝑥𝑥2 1𝑑𝑥
1 1 − ∫ 𝑁𝑥𝑥2 2𝑑𝑥
1 0 − ∫ 𝑁𝑥𝑥2 3𝑑𝑥
1 ⋯ 0 − ∫ 𝑁𝑥𝑥2 𝑛𝑑𝑥
1
−1 − ∫ 𝑁𝑥𝑥3 1𝑑𝑥
1 0 − ∫ 𝑁𝑥𝑥3 2𝑑𝑥
1 1 − ∫ 𝑁𝑥𝑥3 3𝑑𝑥
1 ⋯ 0 − ∫ 𝑁𝑥𝑥3 𝑛𝑑𝑥
1
⋮ ⋮ ⋮ ⋮ ⋮ ⋮ ⋱ ⋮ ⋮
−1 − ∫ 𝑁𝑥𝑥𝑛 1𝑑𝑥
1 0 − ∫ 𝑁𝑥𝑥𝑛 2𝑑𝑥
1 0 − ∫ 𝑁𝑥𝑥𝑛 3𝑑𝑥
1 ⋯ 1 − ∫ 𝑁𝑥𝑥𝑛 𝑛𝑑𝑥
1 ]
(2.26b)
𝐝 = {𝑤1 𝜃1 𝑤2 𝜃2}𝑇 (2.26c) Matriks 𝐁𝛾2 pada persamaan (2.26b) hanya diambil 2 baris yang berhubungan dengan titik nodal elemen yang ditinjau yaitu baris ke-i dan baris ke-(i+1).
Kemudian persamaan (2.26a) disubtitusikan ke persamaan (2.24a) maka akan didapat persamaan:
𝛾𝐷𝑆𝐺 = 𝐁𝛾1 𝐁𝛾2 d = 𝐁𝛾 d (2.27) Dalam penelitian ini, terdapat 2 alternatif pada penggunaan teknik DSG yaitu:
1. Menggunakan shape function linear pada matriks 𝐁𝛾1 disebut DSG-1 2. Menggunakan shape function kriging pada matriks 𝐁𝛾1 disebut DSG-2
Dengan mengganti matriks 𝐁𝛾 pada persamaan (2.19a) dengan matriks 𝐁𝛾 pada persamaan (2.27), maka persamaan umum matriks kekakuan balok Timoshenko untuk MEH-K dengan DSG menjadi:
𝐤 = ∫ 𝐁𝐿𝑒 𝜃𝑇
0 𝐸𝐼 𝐁 𝑑𝑥 + ∫ 𝐁𝛾 𝐿𝑒 𝑇
0 𝐺𝐴𝑠𝐁𝛾𝑑𝑥 (2.28)