DAFTAR ISI
HalamanSampullaporan i
LembarPengesahanLaporan ii
Kata Pengantar iii
Halaman Sampul Modul iv
Lembar Pengesahan Modul v
Daftar isi vi
BAB I PENDAHULUAN
1.1 Latar Belakang 1
1.2 Rumusan Masalah 1
1.3 Pembatasan Masalah 2
1.4 Tujuan Praktikum 2
1.5 Sistematika Penulisan 2
BAB II DASAR TEORI
2.1 Motion Sensor 4
BAB III METODOLOGI PENELITIAN
3.1 Alat dan Bahan 8
3.2 Langkah Percobaan 8
3.3 Data Praktikum 11
BAB IV ANALISA BAB
4.1 Analisa Grafik 14
BAB V KESIMPULAN DAN SARAN
5.1 Kesimpulan 16
BAB I
PENDAHULUAN
1.1 Latar Belakang
Cahaya memang menarik untuk dipelajari sejak berabad-abad yang lalu banyak ahli yang tertarik untuk meneliti cahaya. Sebagai contoh adalah Newton dan Maxwell. Teori Newton tentang cahaya terkenal dengan teori partikel cahaya sedangkan teori Maxwell terkenal dengan gelombang elektromagnetik. Fisikawan lain yang juga tertarik akan cahaya adalah Huygens, Thomas Young, dan Fresnell tokoh-tokoh fisika ini cukup banyak memberikan sumbangan terhadap perkembangan teori tentang cahaya.
Cahaya merupakan radiasi gelombang elektromagnetik yang dapat dideteksi mata manusia. Karena itu, cahaya selain memiliki sifat-sifat gelombang secara umum missal disperse, interferensi, difraksi, dan polarisasi, juga memiliki sifat-sifat gelombang elektromagnetik, yaitu dapat merambat melalui ruang hampa.
1.3 Batasan Masalah
Agar penelitian ini dapat dilakukan dengan focus, sempurna dan mendalam maka penulis memandang permasalahan penelitian yang diangkat perlu dibatasi variabelnya. Oleh sebab itu penulis membatasi diri agar hanya berkaitan dengan pasco capstone.
1.4 Tujuan
1. Memahami bentuk grafik gerak suatu materi. 2. Memahami prinsip kerja sensor gerak.
3. Memahami perubahan posisi terhadap waktu dan kecepatan. 4. Mahasiswa dapat memahami pergerakan relative satu dimensi. 5. Mahasiswa dapat mengetahui prinsip kerja sensor gerak. 6. Mahasiswa dapat memahami kecepatan relative.
1.5 Sistematika Penulisan
Laporan praktikum ini dibagi menjadi dalam beberapa bab oleh penulis. Hal ini dimaksudkan agar para pembaca mudah memahami isi maupun materi yang terkandung di dalamnya yaitu sebagai berikut :
BAB I Pendahuluan
bab ini menjelaskan latar belakang penulisan laporan praktikum, perumusan masalah, pembatasan masalah, tujuan praktikum dan sistematika penulisan.
BAB II Landasan Teori
BAB III Pengumpulan dan Pengolahan Data
Bab ini menjelaskan tentang Pengumpulan data laporan praktikum dan Pengolahan data praktikum hingga terjadinya laporan ini.
BAB IV Analisa Bab
Bab ini menjelaskan tentang Analisa bab yaitu menjawab soal-soal pada modul 1, 2 dan 3.
BAB V Penutup
BAB II DASAR TEORI
2.1 Motion Sensor
Motion Sensor digunakan untuk mendeteksi gerakan seseorang yang bergerak maju mundur didepan sensor sepanjang garis lurus pada kecepatan yang berbeda. Pergerakan yang berbeda baik posisi, kecepatan maupun waktu akan menghasilkan grafik yang bervariasi. Akibat dari perubahan tersebut akan dihasilkan bentuk grafik yang sesuai dengan perubahan yang dilakukan.
2.2 Gerak Relatif Satu Dimensi
Gerak 1 dimensi adalah gerak suatu objek yang terjadi disepanjang garis lurus. Pemahaman akan kinematika gerak dapat membantu memahami gerak satu dimensi. Gerak satu dimensi terdiri dari dua titik yaitu titik awal dan titik akhir. Terdapat jarak diantara titik awal dan titik akhir serta waktu tempuh dari titik awal ke titik akhir. Selain gerak satu dimensi, terdapat pula gerak 2 dimensi (gerak melingkar dan gerak parabola), dan gerak 3 dimensi (gerak di dalam ruang).
1. Perpindahan dan Jarak
Jarak panjang lintasan sesungguhnya yang ditempuh oleh suatu benda dalam waktu tertentu. Perpindahan adalah perubahan posisi atau kedudukan suatu benda dari keadaan awal ke keadaan akhir. Sedangkan jarak antara posisi awal ke posisi akhir (membentuk garis lurus) disebut perpindahan.
2. Kelajuan dan Kecepatan
2.3 Percepatan
Percepatan adalah perubahan kecepatan tiap satuan waktu. Setiap partikel yang bergerak dengan kecepatan yang tidak konstan mengalami percepatan. Percepatan didefinisikan sebagai rasio v/t dimana v adalah kecepatan (m/s) dan t adalah waktu (sekon). Satuan percepatan adalah m/s2. Berikut adalah persamaan
matematis percepatan:
arata−rata=∆ v∆ t
2.3.1 Percepatan Sesaat
Percepatan sesaat adalah limit percepatan dengan ∆t mendekati nol. Jika digambarkan dengan grafik, percepatan sesaat pada t digambarkan sebagai kemiringan garis yang menyinggung kurva pada saat itu. Berikut adalah persamaan matematis percepatan sesaat
a=lim
∆ t →0
∆ v ∆ t
2.4 Gravitasi
Kecepatan v dari suatu Gerak lurus berubah beraturan dapat dituliskan dalam bentuk persamaan v = v0 + at.
Dengan
v = kecepatan pada waktu t (m/s) v0 = kecepatan awal (m/s)
a = percepatan. (m/s2 ) =m 9,80 m/s2
Dengan demikian benda yang jatuh bebas merupakan suatu gerak lurus berubah beraturan, dan kecepatannya adalah v = v0 + gt (dengan mengabaikan gesekan
udara). Apakah nilai g positif atau negatif adalah tergantung kebutuhan penyelesaian soal.
2.5 Gerak Lurus Berubah
Suatu benda dari keadaan diam atau berkecepatan lambat dapat menjadi bergerak dengan kecepatan yang lebih tinggi. Sebaliknya, suatu benda dapat berkurang kecepatannya atau bahkan berhenti. Benda mengalami keadaan demikian disebabkan adanya suatu percepatan. Jika percepatannya konstan atau tidak berubah terhadap waktu, benda mengalami suatu Gerak Lurus Berubah Beraturan.
Jika v adalah kecepatan saat t , a percepatan dan v0 adalah kecepatan awal, maka
kecepatan dalam suatu gerak lurus berubah beraturan adalah : v = v0 + at
Nilai positif atau negatif dari v dan v0 serta a adalah tergantung acuan. Untuk
Misal benda bergerak dengan kecepatan awal v0 yang bernilai positif (artinya
arah ke x positif). Untuk keadaan di atas, jika a positif, maka v menjadi lebih besar nilainnya saat t dibanding v saat t = 0 atau v0. Sedang jika a negatif, v
menjadi lebih lambat , berhenti atau berbalik arah ke x negatif. 2.6 Bidang Miring
Suatu benda yang dalam kondisi diam pada bidang miring akan mengalami gaya gravitasi , namun besar gaya ini yang tergantung kemiringan bidang miring.
Misalkan suatu bidang miring bersudut θ terhadap bidang datar, dan percepatan gaya gravitasi adalah g.
Benda pada lereng akan mengalami percepatan sebesar:
BAB III METODOLOGI PENELITIAN
Sensor ke meja. Anda memerlukan setidaknya 3m ruang kosong di dengan sensor.B. Hubungkan Motion Sensor ke Interface. Atur sensor Gerak ke setelan “orang”
C. Arahkan Sensor Gerak kebagian tengah tubuh saat anda berdiri di depan sensor. Anda akan memegang “layar” biru besar dari ME-9595 didepan tubuh anda untuk memperbaiki hasil anda, karena pantulan dari berbagai bagian tubuh anda saat anda bergerak dapat memicu gerak cepat bolak-balik.
D. Posisikan monitor komputer sehingga anda bisa melihat layar saat anda menjauh dari Motion Sensor.
Langkah-Langkah Percobaan
A. Atur jarak sekitar 1 meter didepan Motion Sensor, pegan “layar” seperti yang dintujukan.
B. Klik Record Sensor Gerak akan membuat suara klik dan LED Hijau akan berkedip untuk memberitahu bahwa itu aktif. Ada penundaan 3 detik sebelum data mulai dicatat. Penundaan ini memberi anda waktu untuk menyesuaikan posisi anda.
C. Berjalan kearah sensor kemudia menjauh dari sensor, perhatikan grafik saat anda bergerak. Record akan berhenti secara otomatis setelahh 10s.
D. Perhatikan apakah grafik merekam posisi anda dengan benar?
2. Gerak Relatif Satu Dimensi
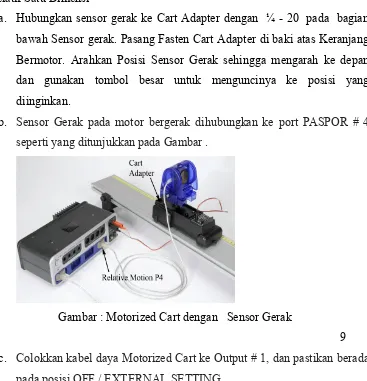
a. Hubungkan sensor gerak ke Cart Adapter dengan ¼ - 20 pada bagian bawah Sensor gerak. Pasang Fasten Cart Adapter di baki atas Keranjang Bermotor. Arahkan Posisi Sensor Gerak sehingga mengarah ke depan dan gunakan tombol besar untuk menguncinya ke posisi yang diinginkan.
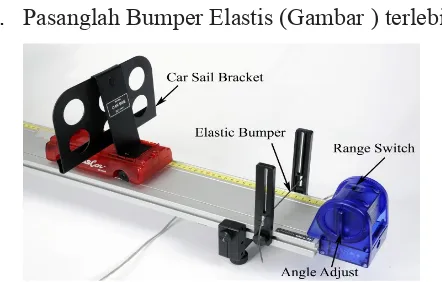
d. Pasanglah Bumper Elastis (Gambar ) terlebih dahulu.
Gambar : Sensor Gerak berada pada Track
e. Kemudian luncurkan Sensor Gerak ke ujung lintasan. Pastikan Sensor Gerak kedua terhubung ke port PASPORT # 1. Pastikan sakelar jangkauannya ada pada ikon "keranjang" untuk sensor KEDUA.
f. Pasang Braket Sail Mobil di mobil merah. Gunakan kaki yang bisa disetel ke tingkat trek agar mobil merah tidak bergerak saat dilepas. g. Sensor Gerak di lintasan akan mengukur gerak gerobak. Sensor Gerak
pada Keranjang Bermotor akan diukur dari Car Sail Bracket (terpasang di mobil) dan dengan demikian merupakan gerakan relatif di antara keduanya.
h. Pada PASCO Capstone Summary, ubah satuan default pada Posisi masing-masing Motion Sensor menjadi cm.
i. Buat grafik Posisi, Port P1, vs. waktu. Kemudian tambahkan posisi pengukuran yang serupa, Port P4, dengan mengklik label posisi sumbu vertikal dan pilih "Add Similar Measurement". Tingkat sampel untuk kedua Sensor Gerak harus 20 Hz.
j. Catatlah data yang terlihat pada PASCO Capstone.
2. Siapkan grafik kecepatan v sebagai fungsi waktu.
3. Pegang lembar bergaris hingga bagian terbawahnya di dekat sensor photogate.
4. Tekan RECORD di bagian kiri bawah halaman Capstone untuk memulai pengumpulan data.
5. Pada saat bersamaan, lepaskan lembar bergaris hingga jatuh di lantai. 6. Tekan STOP di halaman Capstone untuk mengakhiri pengumpulan data. 7. Jika ingin menghapus data, klik “Delete Last Run” di kanan bawah layar. 8. Tinjau grafik Kecepatan sebagai fungsi Waktu (Kecepatan di sumbu
tegak, waktu di sumbu datar). Jika diperlukan, percobaan bisa diulangi hingga grafik data terlihat sesuai.
9. Klik “Data Summary” di kiri halaman. Klik dua kali pengambilan data saat ini (misalkan Run #1), ganti namanya menjadi Gravitasi
III. Percobaan 3
BAB IV
ANALISA PEMBAHASAN
4.1 Analisa Grafik 1. Posisi Grafik
a. Apa arti garis horizontal?
Horizontal adalah sejajar horizon (langit bagian bawah yang berbatasan dengan bumi menurut pandangan mata).
b. Apa perbedaan antara bagian-bagian penggambaran dengan kemiringan positif dan bagian-bagian dengan kemiringan negative?
Menurut pendapat kami saat garis rata-rata kemiringan berada dipositive kecepatannya bertambah, diatas rata-rata pada saat kemiringan negative kecepatan rata-ratanya menurun.
c. Pada penggambaran 3 posisi, apa yang terjadi antara 5 dan 10 detik pengukuran Penggaris.
Kecepatan : Pada penggaris kecepatan yang terjadi antara 5-10 detik yaitu naik dan turun.
Percepatan : Pada kecepatan naik turun dan tinggi. Pada pengukuran 2 dan 3 mobil-mobil Kipas dan Biasa.
Kecepatan dan Percepatannya kurang lebih sama dan rata-rata keduanya yaitu naik dan turun statis tidak berbeda jauh.
d. Bagian mana dari penggambaran q yang lebih mudah untuk dicocokkan? Bagian apa dari plot yang paling sulit untuk dicocokkan? Mengapa?
2. Kecepatan
3. Sensor
Jelaskan fungsi dari sensor motion dan prinsip kerjanya!
Fungsi : Sensor ini biasanya digunakan dalam perancangan detector gerakan berbasis PIR.
Prinsip kerja : adalah dengan mengukur energi infra merah yang ditangkap oleh sensor. Karena PIR adalah komponen elektronika pasif, maka infra merah yang diukur tersebut. Secara singkat, dapat digambarkan langkah kerja sensor gerak itu dilapangan karena adanya panas.
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Simpulan berdasarkan rumusan masalah yang diajukan adalah,
1. Jarak adalah total panjang lintasan suatu partikel yang bergerak yang merupakan besaran skalar sehingga memiliki nilai. Sedangkan perpindahan adalah perubahan posisi suatu partikel yang bergerak dari posisi awalnya yang merupakan besaran vektor yang selain memiliki nilai juga memiliki arah. semakin besar jarak maka waktu yang dibutuhkan untuk menempuh lintasan juga semakin besar. Sedangkan waktu yang semakin besar belum tentu menunjukkan perpindahan yang besar pula.
2. Kelajuan rata-rata partikel sebuah besaran skalar, didefinisikan sebagai jarak tempuh total dibagi waktu yang diperlukan untuk menempuh jarak tersebut
4. Suatu gerak partikel dikatakan bergerak lurus beraturan (GLB) jika melalui suatu lintasan yang lurus, kecepatan konstan,tidak ada perubahan kecepatan terhadap waktu, sehingga perpatan sama dengan nol. Karena jika suatu partikel memiliki percepatan baik itu dipercepat maupun diperlambat maka partikel tersebut dinamakan gerak lurus berubah beraturan (GLBB). Dengan selang vertikal adalah nilai sin ɵ dan selang horizontal adalah nilai cos ɵ.
Sehingga cosθsinθ=tanθ=v. Dari hasil tersebut menunjukkan kcepatan konstan yang merupakan kriteria GLB .dan tentunya harus ditinjau pula dari lintasan yang lurus.
5. Kemiringan tangen yaitu nilai tangen yang terbentuk dari dinaikkannya posisi salah satu ujung tabung sama dengan kecepatan gelembung. Semakin besar nilai tan θ, maka semakin besar pula kecepatan gelembung. Yang berarti waktu yang dibutuhkan gelembung untuk melalui lintasan akan semakin kecil sesuai dengan hubungan antara kecepatan/kelajuan dengan waktu yaitu berbanding terbalik.
A. Diskusi
Diskusi yang kami lakukan berupa saran untuk asisten, dosen, dan laboratorium , 1. Saran bagi asisten
Kepada asisten kami menyarankan agar lebih memperhatikan keadaan praktikan.Asisten hendaknya memberikan pengarahan yang lebih jelas tentang analisis data sehingga praktikan dapat lebih mudah melaporkan hasil pengamatan.
2. Saran bagi dosen
Kepada dosen hendaknya membimbing lebih baik kepada para asisten akan bagaimana cara membimbing praktikannya dalam melakukan suatu praktikum sesuai dengan aturan-aturan yang ada.
3. Saran bagi laboratorium
alat tersebut yang sudah rusak yaitu memiliki kesalahan bersistem bahkan tak dapat/layak untuk digunakan lagi.
5.2 Saran
1. Dosen dapat memberikan pengarahan yang lebih jelas tentang analisis data sehingga praktikan dapat lebih mudah melaporkan hasil pengamatan.
LAPORAN PRAKTIKUM FISIKA GERAK LURUS BERATURAN
DAN GERAK LURUS BERUBAH BERATURAN DENGAN
MENGGUNAKAN “PASCO 850 UNIVERSAL INTERFACE DAN
PASCO CAPSTONE”
Kelas : TID2C1
Nama kelompok :
Farradita Arsanti Shavira Abdul Ustari
Soni
Muhammad Ageng Sadewa Achmad Tarmidzi