i
PROPOSAL
PENELITIAN UNGGULAN ITS
(Penelitian Terapan Multi-Disiplin)
DANA ITS TAHUN 2020
(TAHUN PERTAMA DARI TIGA TAHUN)
Pengembangan Search and Rescue Autonomous Boat
(iBoat): Misi dan Integrasi
Tim Peneliti:
Ketua Ir. Wasis Dwi Aryawan, M.Sc., Ph.D. (T.Perkepalan/FTK/ITS) Anggota 1 Dr. Eng. Trika Pitana, S.T., M.Sc. (T.Sistem Perkepalan/FTK/ITS)
Anggota 2 Ir. Tri Achmadi Ph.D (T.Transportasi Laut /FTK/ITS) Anggota 3 Dony Setyawan, S.T., M.Eng. (T.Perkepalan/FTK/ITS)
DIREKTORAT PENELITIAN DAN PENGABDIAN KEPADA MASYARAKAT INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA 2020
ii
DAFTAR ISI
DAFTAR ISI ... ii DAFTAR TABEL ... iv DAFTAR GAMBAR ... v DAFTAR LAMPIRAN ... viBAB I. RINGKASAN ... vii
BAB II. LATAR BELAKANG ... 1
2.1. Latar Belakang Dan Permasalahan Yang Akan Diteliti ... 1
2.2. Tujuan Umum, Khusus, Dan Urgensi Penelitian ... 2
2.3. Uraian Tentang Spesifikasi Khusus Terkait Dengan Skema. ... 3
BAB III. TINJAUAN PUSTAKA ... 4
3.1. Pola Desain Kapal ... 4
3.2. Operasi Search and Rescue ... 6
3.3. Kapal Search and Rescue ... 8
3.4. Kapal Autonomous ... 9
3.5. Sistem Navigasi Kapal ... 11
3.6. Sistem Kontrol Kapal ... 11
3.7. Sistem Autopilot ... 12
BAB IV. METODE PENELITIAN ... 15
4.1. Metode Penelitian Secara Umum ... 15
4.2. Pembagian Tugas Anggota Penelitian Secara Umum... 19
4.1. Metode Penelitian Secara Khusus ... 19
4.2. Pembagian Tugas Anggota Penelitian Secara Khusus ... 20
BAB V. JADWAL ... 1
BAB VI. DAFTAR PUSTAKA... 1
iii
iv
DAFTAR TABEL
Tabel 1. Pembagian daerah Operasi SAR Indonesia ... 6
Tabel 2. Pembagian daerah Operasi SAR Indonesia ... 7
Tabel 3. Roadmap penelitian secara umum ... 15
v
DAFTAR GAMBAR
Gambar 1. Kecelakaan dan penyelamatan korban di laut ... 1
Gambar 2. Pola desain kapal ... 4
Gambar 3. Daerah operasi SAR Indonesia ... 6
Gambar 4. System operasi SAR Indonesia... 7
Gambar 5. Jenis kapal SAR di Basarnas ... 9
Gambar 6. Sistem Autopilot iBoat ... 13
Gambar 7. Blok diagram system autopilot rudder ... 13
Gambar 8. Gerakan Proportional Dan Pergerakan Ketika Mendapat Gangguan ... 14
vi
DAFTAR LAMPIRAN
Biodata Tim Peneliti. (Format sesuai Lampiran 4)
Surat Pernyataan Kesediaan Anggota Tim. (Format sesuai Lampiran 5) Surat Komitmen Peneliti Luar ITS. (Format sesuai Lampiran 6)
vii
BAB I. RINGKASAN
Indonesia merupakan negara yang rawan kecelakaan yang terjadi di darat, laut dan udara. Kecelakan dapat berasal dari bencana alam, kesalahan operasional manusia dan kesalahan manajemen koordinasi. Kecelakan yang terjadi di laut merupakan kecelakaan dengan jumlah korban jiwa yang hilang terbanyak yang terjadi karena sangat sudah melakukan deteksi lokasi, melakukan pencarian dan penyelamatan karena harus berhadapan dengan gelombang dan angin yang tidak bersahabat. Dalam penelitian ini secara umum akan diakan dibuat dan didesain kapal
Autonomous yang dapat digunakan untuk melakukan search and recue korban di laut dengan menerapkan autopilot untuk mempercepat respon agar mengurangi dan mengurangi resiko tim penolong. Penelitian ini melibatkan beberapa disiplin ilmu Naval architecture, Marine Engineering, Robotic Engineering dan Control Engineering. Secara khusus pada penelitian ini merupakan pengabungan sub-sub penelitian yang lain yang digabung menjadi satu kesatuan. Waktu penelitian dilakukan selama lima tahun dengan target tahun pertama mendesain dan membuat kapal autonomous untuk keperluan search korban yang ada dilaut, tahun kedua mendesain kapal autonomous untuk keperluan recue korban yang ada dilaut yang membutuhkan ukuran kapal lebih besar. Selain itu direncanakan mendapatkan paten tentang desain kapal Search and Rescue Autonomous Boat (iBoat).
1
BAB II. LATAR BELAKANG
2.1. Latar Belakang Dan Permasalahan Yang Akan Diteliti
Kecelakaan kapal dari beberapa decade ini terus naik, ini tentu mengkawatirkan masyarakat dan perlu penanganan khusus untuk membenahinya, kecelakaan ini menimbulkan kerugian ekonomi bahkan korban jiwa [1]. Pemetaan lokasi kecelakaan sangat diperlukan yang dapat digunakan sebagai peringatan dini bagi kapal saat melintasi suatu daerah [2]. Berdasarkan laporan hasil investigasi KNKT pada kurun waktu tahun 2007 sampai dengan tahun 2014 pada wilayah perairan di Indonesia, terjadi kecelakaan kapal dengan berbagai jenis kejadian seperti tenggelam, terguling, kandas dan tubrukan. Dari hasil investigasi KNKT, didapatkan kesimpulan terkait dengan faktor penyebab serta faktor yang berkontribusi, diantaranya kelalaian manusia (human error), teknis dan cuaca [3].
Gambar 1. Kecelakaan dan penyelamatan korban di laut
Search and Rescue (SAR) adalah kegiatan dan usaha mencari, menolong, dan menyelamatkan jiwa manusia yang hilang atau dikhawatirkan hilang atau menghadapi bahaya dalam musibah-musibah seperti pelayaran, penerbangan, dan bencana. Istilah SAR telah digunakan secara internasional tak heran jika sudah sangat mendunia sehingga menjadi tidak asing bagi orang di belahan dunia manapun tidak terkecuali di Indonesia. Operasi SAR dilaksanakan tidak hanya pada daerah dengan medan berat seperti di laut, hutan, gurun pasir,
2
tetapi juga dilaksanakan di daerah perkotaan. Operasi SAR seharusnya dilakuan oleh personal yang memiliki ketrampilan dan teknik untuk tidak membahayakan tim penolongnya sendiri maupun korbannya. Operasi SAR dilaksanakan terhadap musibah penerbangan seperti pesawat jatuh, mendarat darurat dan lain-lain, sementara pada musibah pelayaran bila terjadi kapal tenggelam, terbakar, tabrakan, kandas dan lain-lain [4]. Untuk kegiatan tersebut SAR sangat memerlukan kapal yang dapat digunakan untuk mencari dan menolong korban. Kapal yang digunakan harus tangguh mampu menghadapi berbagai cuaca ekstrim seperti angin yang kencang, gelombang yang tinggi dan kondisi gelap gulita.
Kemanjuan teknologi dibidang informasi dan digital yang begitu cepat memungkinkan melakukan penyelamatan SAR secara terpadu, sehingga mengurangi resiko korban jiwa dan tim penyelamat yang bekerja [5]. Pengabungan ini memungkinkan pembuatan kapal SAR menggunakan konsep autonomous vessel. Penggunaan kapal autonomous memungkinkan kapal di control dari jarak jauh sehingga menggurangi resiko tim penolong yang bekerja, kapal dapat beroperasi dengan cepat tanpa persiapan yang lama, selain itu memungkinkan kapal untuk melakukan respon secara otomatis terhadap lingkungan sekitar berupa angin dan gelombang lebih sehingga lebih tahan tinggi tingkat survivalnya [6].
Semakin tidak bersahabatnya iklim, semakin banyaknya aktifitas manusia melalui laut dan wilayah Indonesia yang sebagian besar berupa lautan memerlukan kapal SAR yang Tangguh yang dapat dioprerasikan diberbagai medan untuk mengurangi korban jiwa dilaut dan meminimalkan resiko tim penolong. Secara umum pada penelitian diusulkan desain dan pembangunan Search and Rescue Autonomous Boat (iBoat) yang merupakan gabungan berbagai ilmu Naval Architecture Engineering, Marine Engineering,Robotic Engineering and Control Engineering. Khusus pada penelitian ini merupakan pengabungan sub-sub penelitian yang lain yang digabung menjadi satu kesatuan.
2.2. Tujuan Umum, Khusus, Dan Urgensi Penelitian
Dalam penelitian ini dibuat dua tujuan umum dan tujuan khusus yang masing-masing dijabarkan sebagai berikut:
Tujuan Umum Penelitian:
• Membuat desain kapal SAR yang Tangguh yang dapat dioperasikan disegala medan untuk mengurangi korban jiwa dan meminimalisir resiko tim penyelamat.
3
• Membuat kapal SAR dengan skala sebenarnya yang dapat diaplikasikan di lapangan dengan keunggulan teknis dan ekonomis.
• Mengembangkan dan mengaplikasikan Artificial Intelligent dibidang perkapalan dengan menerapkan autonomous yang mampu memonitor dan merespon kondisi cuaca buruk ketika kapal beroperasi.
• Mengembangkan system navigasi cerdas dibidang perkapalan yang mampu menyelesaikan misi pencarian dan penyelamatan.
Tujuan Khusus Penelitian:
• Menentukan misi yang terkait dengan kebutuhan kapal search and rescue (SAR) autonomous yang dibutuhkan oleh Indonesia untuk melakukan misi pencarian korban dan penyelamatan di laut.
• Memonitor jalanya sub-sub penelitian kapal search and rescue (SAR).
• Mensingkronisasi antara sub-sub penelitian dan mencarikan solusi jika terdapat kendala. • Mengkompilasi hasil penelitian sehingga didapatkan sebuah produk yang aplikatif
kebutuhan kapal search and rescue (SAR) autonomous sebagai akhir penelitian yang dituju.
Urgensi Penelitian:
• Penelitian ini sangat diperlukan mengingat indonsesia merupakan negara yang rawan bencana alam di darat, dilaut dan udara.
• Pencarian dan pertolongan korban jiwa membutuhkan waktu yang cepat dan akurat khususnya korban kecelakaan dilaut.
• Tim pencari dan penolong (SAR) membutuhkan teknologi tinggi dan tentunya harus di jaga keamanannya untuk itu kapal search and rescue (SAR) autonomous sangat urgen untuk diadakan.
2.3. Uraian Tentang Spesifikasi Khusus Terkait Dengan Skema.
penelitian diusulkan desain dan pembuatan kapal Search and Rescue Autonomous Boat (iBoat) membutuhkan gabungan ilmu yang berbeda sehingga perlu kolaborasi antara: Naval Architecture Engineering, Marine Engineering, Robotic Engineering and Control Engineering.
4
BAB III. TINJAUAN PUSTAKA
Kapal merupakan sarana transportasi air yang dapat mengangkut barang, kendaraan dan barang didalam ruang muatnya. Dibandingkan dengan transportasi lain sarana ini mempunyai keunggulan mampu mengangkut dalam jumlah yang berat dan banyak. Sarana ini juga sangat diperlukan di negara-negara kepulauan seperti Indonesia. Sarana ini sudah dikenal oleh bangsa Indonesia sejak dahulu kala sehingga dikenal sebagai bangsa maritime terbesar di Asia Tenggara. Kejayaan ini perlu dibangkitkan kembali dengan penguasaan dan pengembangkan ilmu pengetahuan dan teknologi terkini. iBOAT merupakan teknologi pengabungan beberapa disiplin ilmu pengetahuan menjadi masa depan kapal-kapal sekarang. Adapung secara teori iBOAT dapat dijabarkan sebagai berikut:
3.1.Pola Desain Kapal
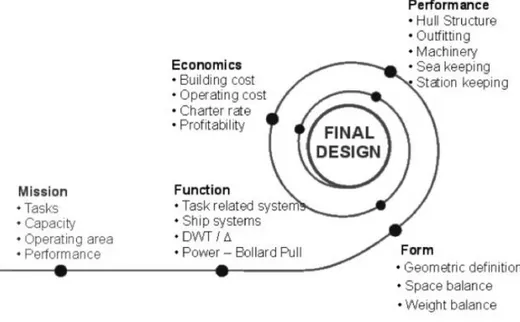
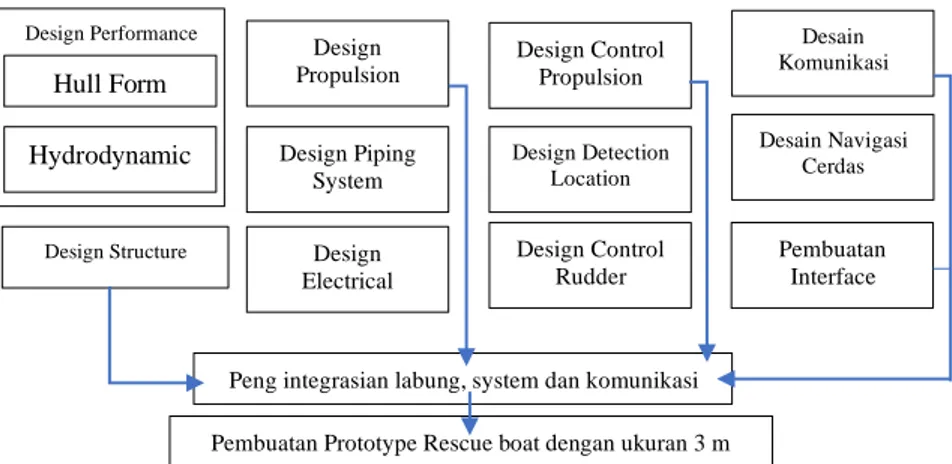
Desain merupakan sesuatu yang sangat penting dalam pembangunan suatu kapal, desain akan menentukan kualitas dan performance dari suatu kapal. Banyak pola dalam mendesain produk, akan tetapi khusus untuk pola desain kapal menggunakan pola spiral ship design yaitu sebagai berikut [7]
Gambar 2. Pola desain kapal
Gambar diatas menunjukan pola desain kapal yang semula lurus selnjutnya diteruskan dalam bentuk spiral yang penjelasanya sebagai berikut: [8]
5
• Mission: ini merupakan langkah awal dalam mendesain kapal, pada langkah ini ditentukan permintaan pemilik kapal dengan melakukan studi kelayakan kapal yang akan didesain. Studi ini dilakukan dengan mengumpulkan data-data kegunaan kapal, kapasitas ruang muat, area operasi kapal dan performance kapal yang diinginkan.
• Function: hasil studi kelayakan akan menghasilkan system-sitem apa saja yang perlu disediakan oleh kapal, banyaknya DWT yang akan diangkut dikapal dan perkiraan daya mesin yang akan digunakan dikapal.
• Form: selanjunya dipilih geometri ukuran utama kapal yang meliputi Panjang, lebar, tinggi, sarat diikuti dengan penentuan rasio ukuran utama dan koefesient-koefesien geometri kapal. Kesesuaian kapasitas ruang muat dengan muatan yang diangkut dikapal juga dipertimbangkan sehingga kapal tidak kelebihan atau kekurangan kapasitas yang diangkutnya.
• Performance: dalam tahp ini didesain bentuk struktur lambung kapal yang sesuai dengan bentuk lambung, didesain peralatan dan perlengkapan apa saja yang akan dipakai dikapal, selain itu juga dilakukan desain permesinan sebagai penggerak utama kapal. Desain performance ketahanan kapal terhadap gelombang dan lingkungan luar juga dihitung dengan menggunakan seakeeping.
• Economic: selain pertimbangan teknis harus dipenuhi selanjutnya dilakukan Analisa / perhitungan ekonomis antara lain: biaya pembangunan kapal, operasional kapal, charter dan keuntungan. Biaya pembangunan kapal meliputi: biaya baja, biaya permesinan, biaya perlatan, biaya kelisterikan dan biaya perlengkapan. Biaya operasional meliputi: biaya bahan bakar, biaya air tawar, biaya makanan, gaji crew dan biaya lain yang harus dibayarkan saat kapal berlayar.
Pola spiral desain diatas juga ada beberapa literatur yang agak berbeda dimana tidak terdapat bagian yang lurus tetap hanya berbentuk spiral murni, dimana dalam spiral terbagi menjadi bagian-bagian utama yaitu: Concept Design, Preliminary Design, Contract Design dan Detail Design. Pada tahap concept design dilakukan studi: mission, function, form, performance dan
economic selnjutnya akan diulang pada tahap Preliminary Design, Contract Design dan Detail Design. Concept design merupakan studi kelayakan tentang kapal yang akan dibangun.
Preliminary design merupakan desain awal pendetailan dari concept design. Contract design
merupakan contract design antara pemilik dan galangan kapal yang akan membangun kapal tersebut. Dan detail design merupakan gambar detail sekala sebenarnya atau disebut gambar produksi[9] [10].
6 3.2.Operasi Search and Rescue
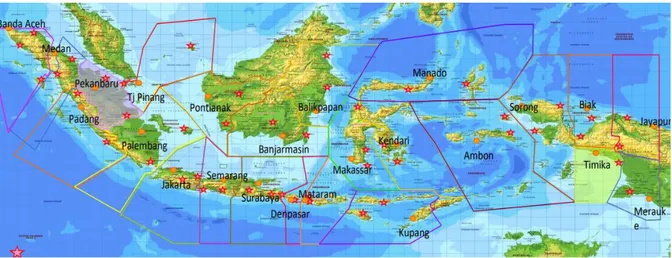
Indonesis sebagai negara yang rawan bencana alam agar penangnannya maksimal dibagi menjadi dibagi menjadi 2 daerah operasi type: A disebelah barat dan B disebelah timur. Daerah operasi type A terdiri dari 16 daerah, dan type C terdiri 12 secara total terdapat 38 daerah operasi yang dapat dilihat pada table dibawah ini [11].
Tabel 1. Pembagian daerah Operasi SAR Indonesia
Daerah tersebut diplot dalam peta Indonesia dapat dilihat pada peta dibawah ini. Semua daerah di Indonesia telah terpetakan Kawasan darat dipulau dan di laut. Legenda peta tanda bintang menunjukan potensi bencana yang terjadi dan tanda lingkaran orange menunjukan pos SAR yang bertanggungjawab. Terdapat 77 pos SAR yang tersebar disluruh Indonesia yang tersebar dari Sabang sampai Merauke.
Gambar 3. Daerah operasi SAR Indonesia
Dari data yang didapatkan dari BASARNAS didapatkan data kecelakaan darat, laut dan udara pada tahun 2018. Dari data terdapat lima macam jenis kecelakaan antara lain: pesawat udara, kapal, bencana, kondisi membahayakan dan kecelakan khusus. Dari hasil investigasi terdapat 2.146 kejadian kecelakaan kapal, kecelakaan kapal merupakan sumber kecelakaan kedua tersbesar dibandingkan sumber lain. Dari hasil investigasi banyaknya korban hilang dialami
7
oleh kecelakaan kapal, karena untuk melakukan pencarian dan penyelamatan harus berhadapan dengan angin dan gelombang yang tidak bersahabat. Untuk itu kapal outonomouse sangat diperlukan untuk melakukan SAR dilaut.
Tabel 2. Pembagian daerah Operasi SAR Indonesia
Kejadian kecelakaan terjadi secara mendadak tidak menunggu korban atau tim penolong siap. Setiap saat diperlukan kesiap siagaan supaya korban jiwa dapat ditekan seminimal mungkin. Teknologi informasi untuk melaporkan kecelakaan secepat mungkin diikuti dengan respon pencarian dan penyelamatan yang tepat dan cepat juga akan menurunkan resiko korban jiwa. Ketika terjadi kecelakaan pesawat akan dilaporkan oleh ELT melalui satelit menuju basarnas, sedangkan kecelakaan kapal laut melalui EPIRB. Teknologi informasi ini sangat berguna untuk menentukan lokasi kecelakaan ketika tidak terdapat terdapat saksi mata. Teknologi informasi yang sekarang ini ada perlu dikembangkan keakurasian karena seringkali kecelakaan di laut tidak ditemukan.
8
Selain dilaporkan melaui teknologi satelit, kecelakaan juga sering dilaporkan secara langsung dengan melihat langsung. Selanjutnya BASARNAS akan berkoordinasi dengan TNI. Polisi, dan Instansi atau swada masyarakat.
3.3.Kapal Search and Rescue
Armada kapal SAR yang dimiliki oleh Badan SAR Nasional (BASARNAS) dikelompokan menjadi 6 (enam) macam berdasarkan panjang dan jangkauannya antara lain [12]:
1. Rescue Ship adalah kapal kelas I versi SAR (panjang >40 M) yang digunakan sebagai sarana pencarian dan pertolongan dilengkapi dengan peralatan SAR;
2. Rescue Boat adalah kapal versi SAR yang digunakan sebagai sarana pencarian dan pertolongan yang dilengkapi dengan peralatan SAR, dan digolongkan berdasarkan ukuran menjadi 3 ( tiga) jenis:
a. Kelas II (panjang 30 s.d. 40 M). Standar Rescue Boat Kelas II; Kapal Rescue Boat Panjang 40m Kapal Rescue Boat Panjang 36m
b. Kelas III (panjang 20 s.d. < 30 M). Standar Rescue Boat Kelas III; c. Kelas IV (panjang 12 s.d. < 20 M). Standar Rescue Boat Kelas IV;
3. Hovercraft adalah kendaraan yang berjalan diatas bantalan udara (air cushion) yang dilengkapi dengan baling - baling udara sebagai alat pendorong, untuk sarana pencarian dan pertolongan di perairan, lumpur dan rawa-rawa;
4. Rigid Inflatable Boat (RIB) adalah perahu berbahan dasar karet dengan lunas fiber glass serta dilengkapi kemudi, yang digunakan sebagai sarana pencarian dan pertolongan di area perairan/ laut;
5. Rubber Boat adalah perahu berbahan dasar karet yang dapat dikembangkan dan dilipat, yang dilengkapi dengan motor tempel sebagai sarana pencarian dan pertolongan di area perairan/ laut;
6. Rafting Boat adalah perahu karet tanpa motor tempel, yang decknya tidak terbuat dari material keras sehingga mempunyai kelenturan untuk melintasi sungai yang berbatu-batu/ daerah lokasi banjir.
9
Kapal kelas I Kapal kelas II
Kapal kelas I Kapal kelas II
Hovercraft Rigid Inflatable Boat (RIB)
Rubber Boat Rafting Boat
Gambar 5. Jenis kapal SAR di Basarnas
3.4.Kapal Autonomous
Istilah kapal Autonomous atau Unmanned Surface Vehicle (USV) atau Autonomous Surface Vehicle (ASV) dimaksudkan untuk wahana yang dioperasikan pada permukaan air tanpa awak. USV dikendalikan autopilot dengan memberikan perintah- perintah seperti waypoint, melalui Ground Control Station (GCS). USV dapat mengolah data-data pergerakan
10
dan pengamatan lalu mengirimkannya ke GCS secara real time melalui sistem komunikasi nirkabel. USV sebenarnya telah diujicobakan sejak Perang Dunia II, namun belum terlalu dikenal karena kapal-kapal pengintai tanpa awak generasi awal seperti OWL Mk II masih diklasifikasikan sebagai Autonomous Underwater Vehicle (AUV). Dilanjutkan tahun 1944, Kanada mengembangkan konsep torpedo COMOX sebelum penyerangan ke Normandia. Setelah Perang Dunia II penggunaan USV menjadi lebih berkembang, di antaranya untuk mengambil sampel air yang terkena radioaktif setelah pemboman Able dan Baker di Atol Bikini tahun 1946. USV juga sangat berguna dalam bidang pengamatan wilayah, pengintaian, dan patrol karena memiliki kemampuan yang lebih baik dibandingkan menggunakan radar, namun lebih murah dibandingkan memperbanyak kapal komersial maupun pesawat terbang serta lebih fleksibel daripada yang dapat dilakukan oleh kapal komersial.
Beberapa jenis USV saat ini akan menjadi peralatan yang efisien untuk melakukan patroli, seperti patroli patok-patok perbatasan di laut, perairan dangkal dan di sekitar garis pantai. Sistem ini dapat mengisi kekosongan data yang tidak dapat dilakukan oleh kapal patroli biasa. Untuk berpatroli di patok perbatasan dapat menghadirkan tantangan teknologi tersendiri. Hal ini disebabkan oleh dinamika lingkungan dan lebih rawannya ancaman balik dari para penyelundup ilegal maupun para pencuri ikan illegal. Terlebih kapal-kapal penyelundup yang terbuat dari bahan non logam, akan sangat sulit diidentifikasikan jika menggunakan radar saja, sehingga dibutuhkan pengamatan visul scara langsung untuk mengetahui kondisinya.
Contohnya adalah ASV Global yang mengembangkan USV dengan kode C sweep untuk diaplikasikan dalam berbagai bidang seperti anti ranjau, anti kapal selam, dan pengintaian. Kendaraan ini memiliki kemampuan bermanuver dengan baik, towing, dan ketahanan komponen elektronik yang membuatnya dapat digunakan sebagai pendukung peperangan ranjau. Selain itu, kendaraan ini juga mampu menyebarkan, tracking, dan saling terhubung dengan sistem autopilot lainnya baik USV, ROV, maupun AUV. Kendaraan ini dapat dijalankan dalam metode manual maupun dalam metode autopilot. Untuk mengendalikannya, kendaraan ini dikendalikan melalui darat menggunakan jaringan komunikasi berupa UHF (Ultra Gigh Frequance), L/S Band, maupun Sat-Comms Options Sidescan dan teknologi ASView untuk mengarahkannya. ASV tidak hanyamemiliki kemampuan untuk pengintaian saja, tapi juga dapat digunakan untuk pengejaran target. Untuk itu, kendaraan ini dilengkapi 2 mesin diesel dan kapasitas BBM yang besar yaitu 2300 liter sehingga memiliki kecepatan tinggi hingga 25+ knot serta dapat menjangkau area seluas 230 nm untuk ukuran kapal 10 meter.
11
Dengan ukurannya yang kecil, maka USV akan mudah dimobilisasi menggunakan kapal konvensional yang lebih besar. Pada prakteknya nanti, kapal konvensional ini dapat difungsikan sebagai kapal induk/pangkalan terapung yang membawahi beberapa USV. USV ini akan dilengkapi kamera pengintai yang akan digunakan untuk memonitor wilayah patrolinya. Kemudian USV ini disebar ke berbagai titik untuk melakukan patroli di wilayah yang telah ditetapkan sesuai koordinat GPS yang telah ditetapkan. Namun GPS memiliki keakuratan yang berbeda-beda tergantung lokasi dari titik koordinat tersebut. Selain itu, keadaan laut juga selalu berubah-ubah tergantung kondisi cuaca dan gelombang
3.5.Sistem Navigasi Kapal
Navigasi adalah ilmu pengetahuan dalam menentukan posisi kapal di laut dengan mengemudikan (steering) kapal secara aman dari suatu tempat ke tempat lain. Sistem navigasi biasanya terdiri dari beberapa perangkat digital maupun analog, untuk yang analog biasanya dilengkapi dengan kompas analog yang dapat mengetahui arah mata angin yang berguna sebagai acuan arah kapal, untuk perangkat digital sudah terdapat GPS atau Global Positioning System yaitu sebuah perangkat yang dapat menerima lokasi keberadaan kapal dengan mengacu pada satelit yang bergerak mengitari bumi. GPS menerima data yang dikirim dari satelit berupa data NMEA 0183. NMEA (National Marine Electronics Association) adalah standar yang digunakan dalam pengiriman data GPS yang berupa protokol data, garis lintang, garis bujur, ketinggian, dan waktu. Kompas digital juga tergolong perangkat digital dimana pemakaiannya harus diintegrasikan kembali pada sebuah sistem sehingga pembacaan arah mata angin dapat dilakukan dan dapat mengetahui arah kapal [13].
3.6.Sistem Kontrol Kapal
Kontrol adalah proses pengaturan / pengendalian terhadap satu atau beberapa besaran (variabel, parameter) sehingga berada pada suatu harga atau dalam suatu rangkuman harga (range) tertentu. Dalam istilah lain disebut juga teknik pengaturan, sistem pengendalian atau sistem pengontrolan. Secara umum sistem kontrol dapat dikelompokkan sebagai berikut [14]:
a. Dengan operator (manual) dan otomatik.
b. Jaringan tertutup (closed-loop) dan jaringan terbuka (open-loop). c. Kontinu (analog) dan diskontinu (digital, diskrit).
12
e. Menurut sumber penggerak : elektris, pneumatis (udara, angin), hidarulis (cairan), dan mekanis.
Aksi kontrol PID (Proportional, Integral, Derivative) banyak ditemukan di dunia industri dan satu – satunya strategi yang paling banyak diadopsi pada pengontrolan proses. Berdasarkan survey, 97% industri yang bergerak dalam bidang proses (seperti kimia, pulp, makanan, minyak, dan gas) menggunakan PID sebagai komponen utama dalam pengontrolannya [15]. Sistem kontrol PID (Proportional-Integral-Derivative) merupakan suatu kontroler yang berfungsi untuk menentukan kepresisian (kestabilan) suatu system instrumentasi dengan karakteristik umpan balik pada sistem tersebut. Kontroler PID terdiri dari tiga parameter yaitu P (proportional), D (derivative), I (integral). Dengan masing-masing parameter memiliki kelebihan dan kekurangan. Dalam implementasinya masing-masing parameter dapat bekerja sendiri maupun menggabungkan dari parameter tersebut. Parameter P, I dan D merupakan parameter yang diatur dalam sistem sesuai terhadap input sistem yang diinginkan. Sistem control PIDbanyakdigunakanuntukpengaruhberbagaiprosesproduksi. Sebuah kontroler PID secara kontinyu menghitung nilai kesalahansebagai beda antara setpoint yang diinginkan dan variabel prosesterukur. Kontroler mencoba untuk meminimalkan nilai kesalahan setiap waktu dengan penyetelan variabel kontrol, seperti posisi keran kontrol, damper, atau daya pada elemen pemanas, ke nilai baru yang ditentukan oleh jumlahan:
3.7.Sistem Autopilot
Sistem autopilot adalah sebuah sistem mekanikal, elektrikal, atau hidraulik yang memandu sebuah kendaraan tanpa campur tangan dari manusia. Umumnya autopilot dihubungkan dengan pesawat, tetapi autopilot juga digunakan di kapal dengan istilah yang sama. Pergerakan kapal dalam mode autopilot dipandu oleh sistem navigasi dan system
13
kontrol. Sistem navigasikapalpada autopilotmenggunakan metode waypoint. Sistem navigasi akan memandu USV bergerak secara teratur mengikuti titik tuju (waypoint) yang telah diatur pada Ground Control Station (GCS).
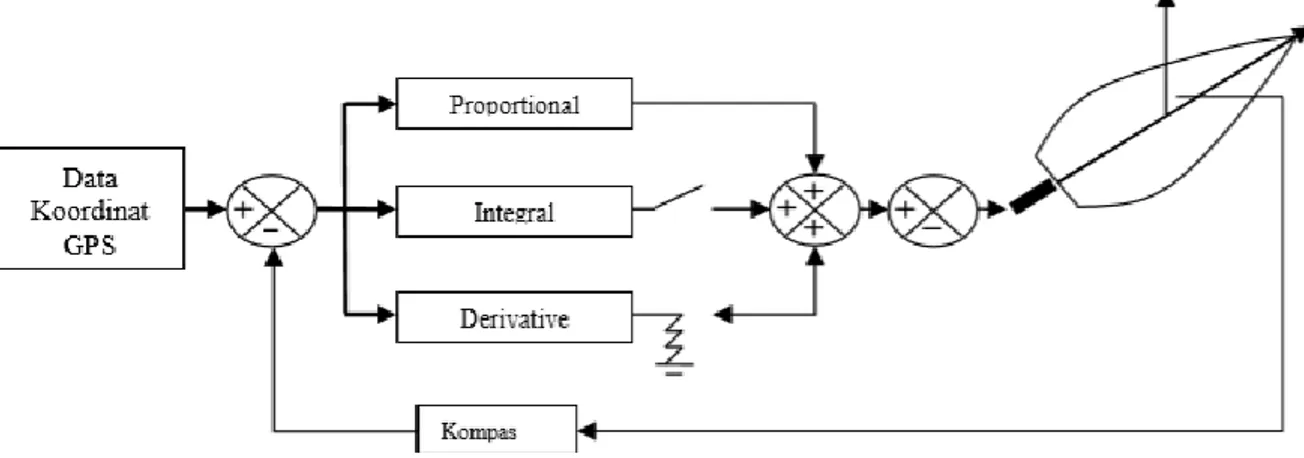
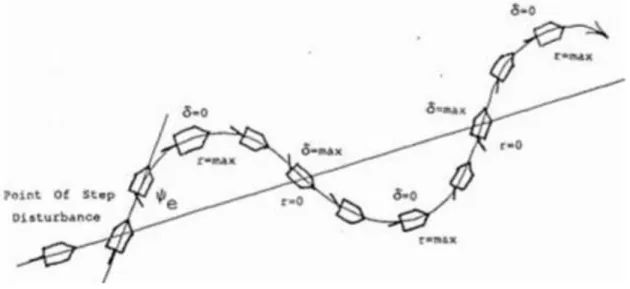
Dalam pergerakan USV, gaya luar seperti angin dan ombak maupun gaya dari dalam seperti ketidakseimbangan putaran kecepatan motor induk akan memberikan pengaruh dalam pergerakannya. Maka dari itu dibutuhkanlah sistem kontrol untuk mengendalikan kapal tetap menuju ke titik tujunya. Dalam studi simulasi sistem kemudi USV, penting bahwa model dinamika sistem yang relatif akurat mempengaruhi kinerja kemudi.Sistem yang dimaksud bias dianggap sebagai kapal dengan kemudiaktuator, yang mengalami gangguan eksternal seperti ditunjukkan pada gambar berikut [16].
Gambar 6. Sistem Autopilot iBoat
Autopilot dirancang untuk mengarahkan USV ke titik tujuan dan memanipulasi rudder sedemikian rupa untuk mengurangi perbedaan antara lintasan yang diinginkan dan lintasan aktual yang ditempuh USV. Dalam hal ini, autopilot bergantung padasistem kontrol. Pada sistem kontrol dikenal yang namanya PID (Proportional, Integral, dan Derivative).Gambar berikut [17]:
14
Faktor-faktor pengganggu menyebabkan arah kapal berbelok hingga terjadi ketidaksesuaian antaralintasan yang diinginkan dan aktual.Pada saat itu terjadi terdeteksierror, USV akan melakukan koreksi danrudder bereaksi untuk membawa perahu kembali ke lintasan yang diinginkan.Namun, saat menuju lintasan yang diinginkan, akan terjadi overshot dan terjadi error lagi kearah sebaliknya. Kemudi USV akan melakukan koreksi lagi dan rudder bereaksi untuk membawa perahu kembali ke lintasan yang diinginkan Hal ini akan terjadi terus menerus dan menyebabkan biaya bahan bakar, waktu tambahan, dan menurunkanefisiensi.
15
BAB IV. METODE PENELITIAN
4.1. Metode Penelitian Secara Umum
Dalam penelitian ini diusulkan pembuatan kapal search yang akan diinstal ke kapal rescue yaitu road map-nya sebagai berikut:
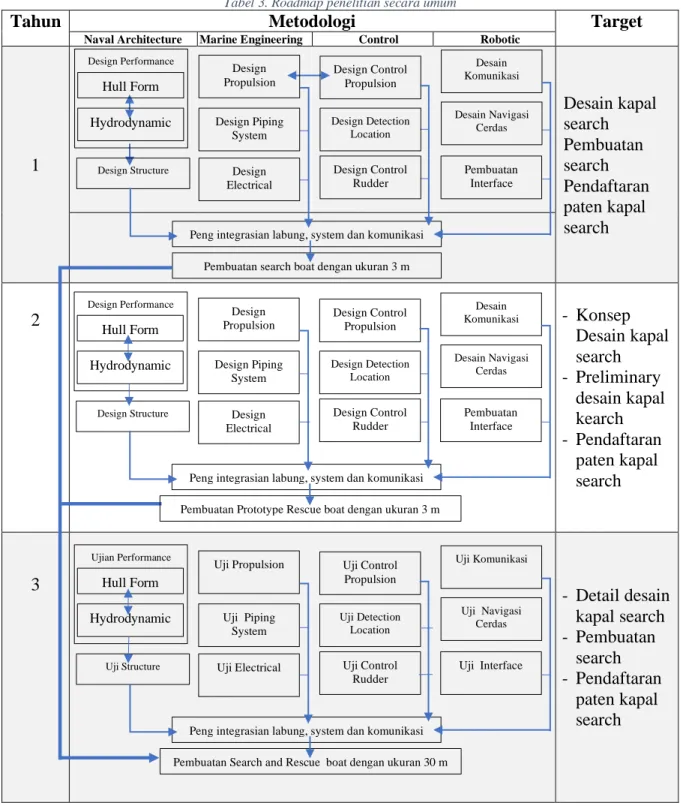
Tabel 3. Roadmap penelitian secara umum
Tahun Metodologi Target
Naval Architecture Marine Engineering Control Robotic
1 - Desain kapal search - Pembuatan search - Pendaftaran paten kapal search 2 - Konsep Desain kapal search - Preliminary desain kapal kearch - Pendaftaran paten kapal search 3 - Detail desain kapal search - Pembuatan search - Pendaftaran paten kapal search Pembuatan Interface Hull Form Hydrodynamic Design Performance Design Structure Design Propulsion Design Piping System Design Electrical Design Detection Location Design Control Propulsion Design Control Rudder Desain Komunikasi Desain Navigasi Cerdas
Peng integrasian labung, system dan komunikasi Pembuatan search boat dengan ukuran 3 m
Pembuatan Interface Hull Form Hydrodynamic Design Performance Design Structure Design Propulsion Design Piping System Design Electrical Design Detection Location Design Control Propulsion Design Control Rudder Desain Komunikasi Desain Navigasi Cerdas
Peng integrasian labung, system dan komunikasi Pembuatan Prototype Rescue boat dengan ukuran 3 m
Uji Interface Hull Form Hydrodynamic Ujian Performance Uji Structure Uji Propulsion Uji Piping System Uji Electrical Uji Detection Location Uji Control Propulsion Uji Control Rudder Uji Komunikasi Uji Navigasi Cerdas
Peng integrasian labung, system dan komunikasi Pembuatan Search and Rescue boat dengan ukuran 30 m
16
Road map dibuat untuk mencapai tujuan yang diinginkan, road map dirancang selama 3 tahun. Dimana setiap tahunya mempunyai target yang berbeda yaitu sebagai berikut:
Tahun 1 (pertama)
Pada tahun pertama bertujuan mendesain dan membangun kapal search dengan ukuran 3 m, kapal ini digunakan sebagai sarana pencarian orang di lautan dengan membawa alat penolong sederhana berupa lifebuoy. Hasil desain dan pembangunan ini akan didaftarkan paten ke HKI dengan keunggulan-keunggulan yang telah direncanakan. Untuk mencapai tujuan itu masing-masing keilmuan melakukan pengembangan penelitian sendiri-sendiri yang akan digabungkan menjadi satu yaitu sebagai berikut:
• Displin naval architecture: melakukan kajian tentang bentuk lambung kapal search yang optimal ditinjau dari segi kapasitas dan teknis perkapalan sesuai peraturan dan regulasi yang berlaku. Lambung ini akan dilakukan uji karakteristik hidrodinamika yang mempunyai kemampuan low resistance, good seakeeping dan good maneuvering. Selanjunya akan di desain struktur untuk memperkuat hull yang telah dibuat tersebut. • Disiplin marine engineering: melakukan kajian tentang system propulsi kapal search
yang efektif kapal yang akan digunakan, system ini didesain mempunyai effesiensi yang tinggi dan tidak mengalami kavitasi. Selanjunya akan didesain system perpipaan yang digunakan dikapal meliputi: system pipa bahan bakar, system pipa bilga balas, system pipa minyak pelumas dan system pipa-pipa yang lain.
• Devisi control engineering: melakukan kajian tentang system kontrol kapal search yang efektif kapal yang akan digunakan, system control yang dikembangkang digunakan untuk mengontrol putaran baling-baling sehingga RPM nya dapat diatus sesuai dengan kebutuhan. Dikembangkan juga system pendekti lokasi dimana kapal tersebut beroperasi, juga system ini dapat digunakan untuk mengetahui posisi korban dilautan. Selanjutnya di gunakan pengontrolan rudder untuk olah gerak kapal bergerak ke kanan dan ke kiri. • Devisi robotic engineering: melakukan kajian tentang system komunikasi kapal search
yang efektif kapal yang akan digunakan, system ini didesain mampu untuk berkomunikasi leawat kabel atau juga wireless. Juga digunakan Artificial Intelligent (AI) agar rudder agar kekanan atau kekiri, AI berguna untuk autonomous sehingga kapal bergerak secara otomatis. Untuk mempermudah dibuatkan interface menggunakan graphic unit interface (GUI) sehingga mudah diperasikan oleh orang awam sekaligus tinggal melakukan setting lokasi awal dan lokasi tujuan.
17
• Gabungan desain masing-masing keilmun akan dibuat kapal search autonomous dengan ukuran 3 mater yang dapat digunakan melakukan pencarian dengan raius 1 km.
Tahun 2 (kedua)
Pada tahun kedua bertujuan mendesain kapal rescue dengan ukuran 40 m, kapal ini digunakan sebagai sarana penolong korban di lautan dengan membawa alat ukuran besar sederhana berupa liferaft dengan kapasitas 25 orang. Hasil desain dan pembangunan ini akan didaftarkan paten ke HKI dengan keunggulan-keunggulan yang telah direncanakan dan diuji. Untuk mencapai tujuan itu masing-masing keilmuan melakukan pengembangan penelitian sendiri-sendiri yang akan digabungkan menjadi satu yaitu sebagai berikut:
• Displin naval architecture: melakukan kajian tentang bentuk lambung kapal rescue yang optimal ditinjau dari segi kapasitas dan teknis perkapalan sesuai peraturan dan regulasi yang berlaku. Lambung ini akan dilakukan uji karakteristik hidrodinamika yang mempunyai kemampuan low resistance, good seakeeping dan good maneuvering. Selanjunya akan di desain struktur untuk memperkuat hull yang telah dibuat tersebut. • Disiplin marine engineering: melakukan kajian tentang system propulsi kapal rescue
yang efektif kapal yang akan digunakan, system ini didesain mempunyai effesiensi yang tinggi dan tidak mengalami kavitasi. Selanjunya akan didesain system perpipaan yang digunakan dikapal meliputi: system pipa bahan bakar, system pipa bilga balas, system pipa minyak pelumas dan system pipa-pipa yang lain.
• Devisi control engineering: melakukan kajian tentang system kontrol kapal rescue yang efektif kapal yang akan digunakan, system control yang dikembangkang digunakan untuk mengontrol putaran baling-baling sehingga RPM nya dapat diatus sesuai dengan kebutuhan. Dikembangkan juga system pendekti lokasi dimana kapal tersebut beroperasi, juga system ini dapat digunakan untuk mengetahui posisi korban dilautan. Selanjutnya di gunakan pengontrolan rudder untuk olah gerak kapal bergerak ke kanan dan ke kiri. • Devisi robotic engineering: melakukan kajian tentang system komunikasi kapal rescue
yang efektif kapal yang akan digunakan, system ini didesain mampu untuk berkomunikasi leawat kabel atau juga wireless. Juga digunakan Artificial Intelligent (AI) agar rudder agar kekanan atau kekiri, AI berguna untuk autonomous sehingga kapal bergerak secara otomatis. Untuk mempermudah dibuatkan interface menggunakan graphic unit interface (GUI) sehingga mudah diperasikan oleh orang awam sekaligus tinggal melakukan setting lokasi awal dan lokasi tujuan.
18
• Gabungan desain masing-masing keilmun akan dibuat kapal prototype rescue autonomous dengan ukuran 3 mater yang dapat digunakan melakukan melakukan rescue.
Tahun 3 (ketiga)
Pada tahun ketiga bertujuan melakukan uji dan membangun kapal rescue dengan ukuran 30 m, kapal ini digunakan sebagai sarana penolong korban di lautan dengan membawa alat ukuran besar sederhana berupa liferaft dengan kapasitas 25 orang. Hasil desain yang telah teruji akan didaftarkan paten ke HKI. masing-masing keilmuan melakukan pengembangan penelitian sendiri-sendiri yang akan digabungkan menjadi satu yaitu sebagai berikut:
• Displin naval architecture: melakukan uji tentang bentuk lambung kapal rescue yang optimal ditinjau dari segi kapasitas dan teknis perkapalan sesuai peraturan dan regulasi yang berlaku. Lambung ini akan dilakukan uji karakteristik hidrodinamika yang mempunyai kemampuan low resistance, good seakeeping dan good maneuvering. Selanjunya akan di desain struktur untuk memperkuat hull yang telah dibuat tersebut. • Disiplin marine engineering: melakukan uji tentang system propulsi kapal rescue yang
efektif kapal yang akan digunakan, system ini didesain mempunyai effesiensi yang tinggi dan tidak mengalami kavitasi. Selanjunya akan didesain system perpipaan yang digunakan dikapal meliputi: system pipa bahan bakar, system pipa bilga balas, system pipa minyak pelumas dan system pipa-pipa yang lain.
• Devisi control engineering: melakukan uji tentang system kontrol kapal rescue yang efektif kapal yang akan digunakan, system control yang dikembangkang digunakan untuk mengontrol putaran baling-baling sehingga RPM nya dapat diatus sesuai dengan kebutuhan. Dikembangkan juga system pendekti lokasi dimana kapal tersebut beroperasi, juga system ini dapat digunakan untuk mengetahui posisi korban dilautan. Selanjutnya di gunakan pengontrolan rudder untuk olah gerak kapal bergerak ke kanan dan ke kiri. • Devisi robotic engineering: melakukan uji tentang system komunikasi kapal rescue yang
efektif kapal yang akan digunakan, system ini didesain mampu untuk berkomunikasi leawat kabel atau juga wireless. Juga digunakan Artificial Intelligent (AI) agar rudder agar kekanan atau kekiri, AI berguna untuk autonomous sehingga kapal bergerak secara otomatis. Untuk mempermudah dibuatkan interface menggunakan graphic unit interface (GUI) sehingga mudah diperasikan oleh orang awam sekaligus tinggal melakukan setting lokasi awal dan lokasi tujuan.
19
• Gabungan pengujian yang telah tervalidasi akan di teruskan dengan pembangunan kapal dengan ukuran 30 meter dengan melakukan kerjasama dengan pihak luar.
4.2. Pembagian Tugas Anggota Penelitian Secara Umum
Penelitian ini dilaksanakan secara multy disiplin antara lain Naval architecture, Marine Engineering, Robotic Engineering dan Control Engineering yang masing-masing tergabung dalam beberapa PUI, KST, dan PUSLIT yaitu sebagai berikut:
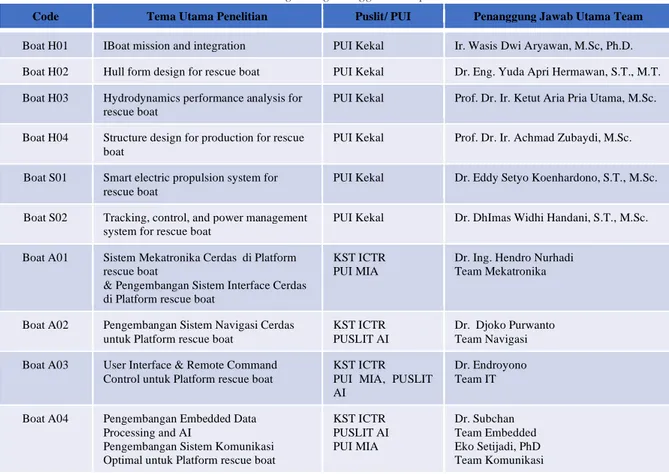
Tabel 4. Pembagian tugas anggota sub- penelitain
Code Tema Utama Penelitian Puslit/ PUI Penanggung Jawab Utama Team
Boat H01 IBoat mission and integration PUI Kekal Ir. Wasis Dwi Aryawan, M.Sc, Ph.D. Boat H02 Hull form design for rescue boat PUI Kekal Dr. Eng. Yuda Apri Hermawan, S.T., M.T. Boat H03 Hydrodynamics performance analysis for
rescue boat
PUI Kekal Prof. Dr. Ir. Ketut Aria Pria Utama, M.Sc. Boat H04 Structure design for production for rescue
boat
PUI Kekal Prof. Dr. Ir. Achmad Zubaydi, M.Sc. Boat S01 Smart electric propulsion system for
rescue boat
PUI Kekal Dr. Eddy Setyo Koenhardono, S.T., M.Sc. Boat S02 Tracking, control, and power management
system for rescue boat
PUI Kekal Dr. DhImas Widhi Handani, S.T., M.Sc. Boat A01 Sistem Mekatronika Cerdas di Platform
rescue boat
& Pengembangan Sistem Interface Cerdas di Platform rescue boat
KST ICTR PUI MIA
Dr. Ing. Hendro Nurhadi Team Mekatronika
Boat A02 Pengembangan Sistem Navigasi Cerdas untuk Platform rescue boat
KST ICTR PUSLIT AI
Dr. Djoko Purwanto Team Navigasi Boat A03 User Interface & Remote Command
Control untuk Platform rescue boat
KST ICTR PUI MIA, PUSLIT AI
Dr. Endroyono Team IT Boat A04 Pengembangan Embedded Data
Processing and AI
Pengembangan Sistem Komunikasi Optimal untuk Platform rescue boat
KST ICTR PUSLIT AI PUI MIA Dr. Subchan Team Embedded Eko Setijadi, PhD Team Komunikasi
Kolom satu menunjukan kode penelitian yang dilakukan, kolom dua merupakan judul penelitian yang diajukan kolom ketiga pusat unggulan yang melakukan dan kolom keempat yang bertindak menjadi ketua penelitian.
4.1. Metode Penelitian Secara Khusus
Setelah dibuat metodologi secara umum selanjutnya dibuat metodologi secara khusus masing masing sub-penelitian untuk mensupport penelitian menjadi suatu produk yang kapal search
20
and rescue aaautonomous sesuai keunggulan yang ingin dicapai. Adapun pada sub-penelitian ini dibuat metode khusus untuk sub-penelitian mission and integration research sebagai berikut:
Gambar 9. Metodologi sub-penelitian mission and integration
Khusus metodologi untuk penelitian ini menentukan bagian awal misi kapal yang akan digunakan dan bagian akhir yang berfungsi untuk mengumpulkan hasil penelitian pada sub-sub penelitian yang lain. Adapun metologi penelitian pada sub-sub-penelitian ini dapat dijelaskan sebagai berikut:
• Menentukan misi yang terkait dengan kebutuhan kapal search and rescue (SAR) autonomous yang dibutuhkan oleh Indonesia untuk melakukan misi pencarian korban dan penyelamatan di laut.
• Memonitor jalanya sub-sub penelitian kapal search and rescue (SAR).
• Mensingkronisasi antara sub-sub penelitian dan mencarikan solusi jika terdapat kendala. • Mengkompilasi hasil penelitian sehingga didapatkan sebuah produk yang aplikatif
kebutuhan kapal search and rescue (SAR) autonomous sebagai akhir penelitian yang dituju.
4.2. Pembagian Tugas Anggota Penelitian Secara Khusus
Untuk mengkompilasi sub-sub penelitian ini maka dibuatlah rincian tugas antara anggota tim sebagai berikut:
• Ketuan peneliti: mengkoordinir di luar sub-sub penelitian pihak lain yang terlibat dalam penelitian kapal search and rescue (SAR) autonomous.
• Anggota Peneliti I: memonitor dan mengkompilasi hasil sub penelitian naval architecture engineering dan marine engineering kapal search and rescue (SAR) autonomous.
Pembuatan Interface Hull Form Hydrodynamic Design Performance Design Structure Design Propulsion Design Piping System Design Electrical Design Detection Location Design Control Propulsion Design Control Rudder Desain Komunikasi Desain Navigasi Cerdas
Peng integrasian labung, system dan komunikasi Pembuatan Prototype Rescue boat dengan ukuran 3 m
21
• Anggota Peneliti II: memonitor dan mengkompilasi hasil sub penelitian naval control engineering dan robotic engineering kapal search and rescue (SAR) autonomous.
• Tenaga Pembantu: membatu ketua dan anggota dalam menyediakan data, menganalisa dan membuat laporan jalannya penelitian.
Gambar 10. Pembagian tugas masing-masing anggota tim
Ketua
Tim
Anggota I Anggota II Anggota III Tenaga Pembantu1
BAB V. JADWAL
Jadwal Penelitian Secara Khusus Sub-Penelitian Mission and Integration
Sub Penelitian
Bulan
3 4 5 6 7 8 9 10 11 Pengumpulan data dareh bencana dan tipe operasi
kapal search and recue x x
Penentuan mission kapal search and recue x x Monitoring dan koordinasi ke tim naval architecture
engineering x x x x x
Monitoring dan koordinasi ke tim marine engineering x x x x x Monitoring dan koordinasi ke tim robotic engineering x x x x x Monitoring dan koordinasi ke tim control engineering x x x x x
Kompilasi masing-masing bagian x x x
1
BAB VI. DAFTAR PUSTAKA
[1] E. Eliopoulou, A. Papanikolaou, and M. Voulgarellis, “Statistical analysis of ship accidents and review of safety level,” Saf. Sci., vol. 85, pp. 282–292, 2016.
[2] A. Toffoli, J. M. Lefevre, E. Bitner-Gregersen, and J. Monbaliu, “Towards the identification of warning criteria: analysis of a ship accident database,” Appl. Ocean Res., vol. 27, no. 6, pp. 281– 291, 2005.
[3] S. Hasugian, A. I. S. Wahyuni, M. Rahmawati, and A. Arleiny, “Pemetaan Karakteristik Kecelakaan Kapal di Perairan Indonesia Berdasarkan Investigasi KNKT,” War. Penelit. Perhub., vol. 29, no. 2, pp. 229–240, 2018.
[4] “Pencarian dan penyelamatan,” Wikipedia bahasa Indonesia, ensiklopedia bebas. 14-Jun-2019.
[5] M. Kurowski, H. Korte, and B. P. Lampe, “Search-and-rescue-operation with an autonomously acting rescue boat,” in International conference on autonomous and intelligent systems, 2012, pp. 141–148.
[6] M. Haase, R. Bronsart, N. Kornev, and D. Nikolakis, “Simulation of the dynamics of an autonomously acting small catamaran for search and rescue process,” in 8th IFAC Conference on
Control Applications for Marine Systems, Rostock, Germany, 2010, pp. 207–212.
[7] A. Papanikolaou, Ship design: methodologies of preliminary design. Springer, 2014.
[8] H. M. Gaspar, A. M. Ross, D. H. Rhodes, and S. O. Erikstad, “Handling complexity aspects in conceptual ship design,” in International Maritime Design Conference, Glasgow, UK, 2012.
[9] T. Lamb, “Ship design and construction,” Ed. Thomas Lamb Publ. SNAME ISBN 0-939773-40-6, 2003.
[10] R. Taggart, Ship design and construction. Society of Naval Architects & Marine Engineers, 1980.
[11] Basarnas, “Rakornas BASARNAS: Strategi Penyelenggaraan Operasi.” [Online]. Available: https://bpbd.jakarta.go.id/assets/attachment/document/Rakornas6_BASARNAS_Strategi_Penye lenggaraan_Operasi.pdf.
[12] “Sarana SAR Laut | Official Website Badan Nasional Pencarian dan Pertolongan.” [Online]. Available: http://basarnas.go.id/sarana-sar-laut. [Accessed: 07-Mar-2020].
[13] M. J. J. Suja, S. R. Sulistiyanti, and M. Komarudin, “Sistem Navigasi pada Unmanned Surface Vehicle untuk Pemantauan Daerah Perairan,” Electrician, vol. 11, no. 1, pp. 32–43, 2017.
[14] A. Putri, “Pengertian Sistem Kontrol/Sistem Kendali,” Retrieved July, vol. 5, p. 2017, 2016.
[15] A. W. Browning, “A mathematical model to simulate small boat behaviour,” Simulation, vol. 56, no. 5, pp. 329–336, 1991.
2
[17] E. D. Sugita, “Pembuatan Purwarupa Tes Model Untuk Menguji Sistem Autopilot Pada Unmanned Surface Vehiche (USV),” PhD Thesis, Institut Teknologi Sepuluh Nopember, 2017.
[18] N. Razi and M. Karatas, “A multi-objective model for locating search and rescue boats,” Eur. J.
3
BAB VII. LAMPIRAN
Biodata Tim Peneliti
Ketua Tim
a. Nama Lengkap (dengan gelar) : Ir. Wasis Dwi Aryawan,M.Sc, Ph.D
b. Jenis Kelamin : Laki-laki
c. Jabatan Fungsional : Lektor
d. NIP/NIK/Identitas Lainnya : N.I.P. 19640210 198903 1 001
e. NIDN : 0010026412
f. Tempat dan Tanggal Lahir : Bojonegoro /10-02-1964
g. E-mail : wasis@na.its.ac.id
h. Nomor Telepon/HP : +628155220557 i. Alamat Kantor : Gedung W Lantai II
Departemen Teknik Perkapalan
Kampus ITS Sukolilo, Surabaya 60111 j. Nomor Telepon/Faks : Tel. +62-031- 5947254 Fax. +62-031-
5947254 k. Pengalaman Penelitian
Perencanaan Kapal Passanger-Logistic-Carier Hemat Bahan Bakar, Aman dan Nyaman untuk Indonesia Bagian Timur Program Hibah Kopetensi Institusi
An Investigation of Hybrid Catamaran Fishing Vessel : A Combination of Diesel Engine, The Use of Sail and Solar Panel Penelitian Unggulan Perguruan Tinggi
An Investigation of Hybrid Catamaran Fishing Vessel : A Combination of Diesel Engine, The Use of Sail and Solar Panel Penelitian Unggulan Perguruan Tinggi
l. Pengalaman Pengabdian Kepada Masyarakat
2014 Pembuatan Rescue Boat berbahan baku plastik PT Pertamina 2014 Desain Bank Terapung untuk Indonesia bagian timur Bank BRI
2013 Lead Engineer, Preparing Front End Engineering Design (FEED) for Intalation Submarine Pipeline for Loading and Unloading at Terminal RU VI Balongan, PT Pertamina
2012 Senior Engineer, EPC for 10” Offshore Pipeline from Palang to FSO Cintana Tomas, PT Duta Marine
2012 Senior Naval Architect, Engineering Refurbishment FSO Kakap Natuna, PT Duta Marine
2012 Lead Engineer, Mooring Analysis of FSO Kakap Natuna, PT Duta Marine
2012 Principal Investigator, Asset Valuation for FSO Belida Project, BNI Sentra Melawai Jakarta
2012 Project Manager, 16” Pipeline Reroute Selection Study, PHE West Madura Offshore PT Pertamina
2012 Senior Engineer, Engineering Refurbishment of SBM for FSO KakapNatuna, PT Duta Marine
2012 Principal Engineer, Mooring Analysis and Assessment of FSO at Widuri Field, CNOOC PT Pertamina
2011 Senior Naval Architect, Basic Design for Self Propeller Urea Barge, PT Pusri Palembang
4
2011 Principal Engineer, Preliminary Fatigue Design Assessment for MT Concord; Tanker Conversion into FSO for Kodeco Project, PT Trada Maritime Tbk.
2011 Principal Investigator, Price Valuation for FSO Brotojoyo, PT Berlian Laju Tanker Tbk.
2011 Lead Engineer, Acquisition of Water Tractor Tug, PT Nusantara Regas m. Publikasi Artikel ilmiah Dalam Jurnal
Experimental Investigation into the Drag Interference of Symmetrical and Asymmetrical Staggered and Unstaggered Catamarans, Journal of Ocean Technology,. Vol. 7/ No. 1, ISSN: 1718-3200/2012
Fuzzy Control for Optimizing Ship Tracking in Karang Jamuang–Tanjung Perak IPTEK The Journal for Technology and Science No 23/2012.
Vane-Turbine as an Energy Conversion in the Propeller Slipstream of Single Screw Ship. Advanced Materials Research 789 417-422. (2013):
Minimizing Axial Energy Loss by Using Vane Turbine in the Propeller Slipstream Applied Mechanics and Materials. Vol. 664. 2014.
The Effect of Ship Coefficients on the Efficiency Gain f Propeller-Vane System IPTEK Journal of Engineering 2.1 (2015).
n. Pemakalah Seminar Ilmiah (Oral Presentation)
Seminar Nasional Pascasarjana XI Perancangan Kapal Passenger-Logistic Carrierantar Pulau di Provinsi Maiuku ciengan Konsep Multitungsi, Pasca Sarjana ITS 15 Agustus 2011
Seminar Nasional Pascasarjana XII Perbandingan Fatigue Life Bentuk Desain Bracket Topside Module FSO dan FPSO Pasca Sarjana ITS 12 Juli 2012
Seminar Nasional Teori dan Aplikasi Kelautan Optimasi Ukuran Utama dan Studi Parametrik Bentuk Bulk Carrier untuk Perairan Dangkal FTK-ITS/5 Desember 2012 o. Karya Buku dalam 5 Tahun Terakhir
Sistem Peralatan dan Perlengkapan kapal 2011 Ship Satutory 2012
p. Perolehan HKI dalam 5-10 Tahun Terakhir
5 Anggota Tim I
Nama Dosen Dr. Eng. Trika Pitana, S.T., M.Sc.
NIP 197601292001121001
NIDN 0029017602
Email trika@its.ac.id Riwayat Pendidikan
S1: Teknik Sistem Perkapalan, ITS Surabaya
S2: Marine Safety & Environmental Protection, WMU Swedia S3: Maritime Sciences, Kobe University. Japan
Penelitian
2014 – Pengembangan Monitoring Trafik Transportasi Laut Melalui Integrasi Database Automatic Identification System (AIS) untuk Pengembangan Metode Keselamatan Kelautan
2015 – Pengembangan Prototipe Fasilitas Monitoring Keselamatan Kapal Berbasis Data Automatic Identification System (AIS)
2017 – Pengembangan Prototipe Sistem Pengolahan Air Balas Kapal Menggunakan Aplikasi Filtrasi Karet Remah Dan Radiasi Sinar Ultraviolet Untuk Menghancurkan Mikroba Air Patogen
2018 – Studi Lanjutan Pengembangan Prototipe Sistem Pengolahan Air Balas Kapal Dengan Pembesaran Skala Dan Variasi Media Filtrasi Untuk Menghancurkan Mikroba Air Patogen
6
7 Anggota Tim II
a. Nama Lengkap : Ir. Tri Achmadi, Ph.D. b. Jenis Kelamin : Laki-Laki
c. NIP : 196501101988031001
d. Fungsional/Pangkat/Gol. : Penata Tk.l (lll/d) e. Jabatan Struktural : Kepala Departemen
f. Bidang Keahlian : Kebijakan Maritim, Transportasi Laut dan Logistik g. Fakultas/Departemen : Fakultas Teknologi Kelautan / Departemen Teknik Transportasi Laut
h. Alamat Rumah dan No. Telp. : Jl. Teknik Sipil J-33 Kampus ITS i. Riwayat penelitian/pengabdian: -
j. Publikasi :
Achmadi T, Hasan Iqbal Nur, Pratiwi Wuryaningrum, Model Insentif Pengembangan Short Sea Shipping Transportasi Barang Di Jalur Pantai Utara Jawa, Seminar Industri dan Jasa Maritim Kementerian Koordinator Bidang Maritim, Jogjakarta, 2016
Achmadi T, Hasan Iqbal Nur, Latama Rizki R, Inland Waterway Transport For Container Shipping: Cikarang To Port Of Tanjung Priok, The 4rd International Seminar on Ocean and Coastal Engineering Environmental and Natural Disaster Management, Surabaya, 2016
Achmadi T, Hasan Iqbal Nur, Firmanto Hadi, Study of Port Tariff Structure and Port Pricing Approach Journal on Applied Mechanichs and Materials, 2016
k. Paten : - l. Tugas Akhir :
Studi Karakteristik Pola Operasi Penangkapan Ikan Nelayan Tradisional: Studi Kasus Nelayan Kebumen dan Juwana
Studi Model Operasi Kapal Ikan Dengan Kapal Angkut Dalam Upaya Peningkatan Produksi Penangkapan Ikan: Studi Kasus Kapal 30 – 60 Gt Di Ppp Bajomulyo – Pati