TUGAS AKHIR
Diajukan Untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Oleh:
Nama : Robertus Bellarmino Oscar Ariswasana NIM : 025114078
PROGRAM STUDI TEKNIK ELEKTRO JURUSAN TEKNIK ELEKTRO
FAKULTAS TEKNIK
UNIVERSITAS SANATA DHARMA YOGYAKARTA
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering Study Program
By:
Name : Robertus Bellarmino Oscar Ariswasana Student Number : 025114078
ELECTRICAL ENGINEERING STUDY PROGRAM
DEPARTMENT OF ELECTRICAL ENGINEERING
FACULTY OF ENGINEERING
SANATA DHARMA UNIVERSITY
Kupersembahkan karya tulis ini kepada :
Tuhan Yesus Kristus atas penyertaan dan bimbingannya
Bapak dan Ibu Tercinta atas segala dukungan, semangat serta doa
Kedua saudaraku tercinta Paska dan Icha
Almamaterku Teknik Elektro USD
Semakin tinggi kita memanjat pohon
Semakin besar angin yang menerpa
Tapi kita dapat jauh melihat sekitar
Seperti pucuk padi
Semakin tinggi
Semakin menunduk
INTISARI
Pendeteksian jarak jauh atau disebut dengan Radar, biasa digunakan di bandara untuk pengaturan lalu lintas udara yang meliputi pendeteksian tinggi, kecepatan dan jarak dari pesawat terbang. Dalam pendeteksian kecepatan pesawat terbang, bandara menggunakan prinsip pergeseran Doppler. Efek Doppler menjelaskan bahwa target yang mendekati peninjau akan menerima frekuensi yang lebih besar daripada target yang menjauhi peninjau. Frekuensi yang diterima oleh radar dari pantulan target adalah hasil penjumlahan dari frekuensi carrier
yang dipancarkan dan frekuensi Doppler. Program simulasi pemrosesan kecepatan pesawat terbang dengan pergeseran Doppler ini dirancang untuk mengetahui kecepatan pesawat terbang.
Program akan memancarkan sinyal pulsa dan menampilkan bentuk sinyal tersebut dengan spesifikasi masukan dari pengguna yang berupa Band Frekuensi, Frekuensi Carrier, Lebar Pulsa, Frekuensi Pengulangan Pulsa (PRF), dan perpindahan posisi target pada axes. Program selanjutnya akan menghitung time travel, jarak target, kecepatan target dan frekuensi Doppler. Untuk mengetahui kecepatan target dan frekuensi Doppler, program akan mengambil posisi target yang dipilih pengguna dan posisi target sesudahnya.
Program simulasi untuk pemrosesan kecepatan pesawat terbang dengan pergeseran Doppler telah diimplementasikan dan dilakukan pengujian untuk mengamati hasil perancangan. Dari hasil pengujian tersebut, program simulasi ini telah bekerja dengan baik. Kinerja dari program ini ditentukan berdasarkan hubungan antara masukan pada program dan kecepatan yang merupakan hasil program. Hasil yang diperoleh adalah frekuensi carrier dan frekuensi Doppler yang meningkat yang mengakibatkan kecepatan yang semakin tinggi. Frekuensi Doppler jauh lebih kecil dari pada frekuensi carrier. Agar memperoleh nilai frekuensi Doppler yang stabil, frekuensi carrier dan kecepatan target juga harus stabil.
Kata kunci : Pergeseran Doppler, kecepatan target, radar
ABSTRACT
Remote detection or known as Radar, commonly use in airport for air traffic control that cover detection of height, velocity and range from the airplane. In velocity detection of airplane, airport applies Doppler shift principle. Doppler Effect explains that target that is moving toward to the observer will receive larger frequency than target moving away from the observer. Frequency received by radar from target reflection is resulted by adding carrier frequency that was transmitted and Doppler frequency. Simulation program of velocity processing of airplane with Doppler shift is designed to understand the airplane velocity.
This program will transmit pulse signal and display the waveform according to the user’s specification input, which are Frequency Band, Carrier Frequency, Pulse Width, Pulse Repetition Frequency (PRF), and displacement of target position on axes. This program calculates time travel, target velocity and Doppler frequency. To understand the target velocity and Doppler frequency, program will take the target position of user’s choice and the next position of the target.
Simulation program for an airplane velocity processing with Doppler shift was implemented and tested to observe the scheme result. From this test, simulation program has been worked well. The performance of the program is determined based on the relation between program’s inputs and the velocity as the result of the program. The results are carrier frequency and the increment of Doppler Frequency resulting a velocity increment. Doppler Frequency much smaller than frequency carrier. To obtain a stable Doppler frequency value, carrier frequency and velocity of targets have to be stable.
Keyword : Doppler shift, velocity of target, radar
Puji syukur penulis panjatkan kepada Tuhan Yang Maha Esa, karena atas Anugerah-Nya penulis akhirnya dapat menyelesaikan Tugas Akhir ini dengan baik.
Dalam proses penulisan Tugas Akhir ini penulis menyadari bahwa ada begitu banyak pihak yang telah memberikan perhatian dan bantuan sehingga Tugas Akhir ini dapat terselesaikan. Oleh karena itu penulis ingin mengucapkan terima kasih kepada :
1. Tuhan Yesus atas penyertaan dan bimbingannya.
2. Bapak Ir. Greg. Heliarko, S.J., B.S.T., M.A., M.Sc, selaku dekan fakultas teknik.
3. Bapak Damar Widjaya, S.T., M.T. selaku pembimbing atas ide-ide yang berguna, bimbingan, dukungan, saran dan kesabaran bagi penulis dari awal sampai Tugas Akhir ini bisa selesai.
4. Bapak Bayu Primawan, S.T., M.Eng., Ir. Iswanjono, M.T., dan B. Djoko Untoro S., SSi., M.T. selaku penguji yang telah bersedia memberikan kritik dan saran.
5. Seluruh dosen teknik elektro atas ilmu yang telah diberikan selama penulis menimba ilmu di Universitas Sanata Dharma Yogyakarta.
6. Bapak dan Ibu tercinta atas semangat, doa serta dukungan secara moril maupun materiil. Kedua adekku, Paska dan Icha atas dukungan, cinta, bantuan
JUDUL ... i
HALAMAN PERSETUJUAN... iii
HALAMAN PENGESAHAN ... iv
HALAMAN PERNYATAAN KEASLIAN KARYA ... v
HALAMAN PERSEMBAHAN ... vi
HALAMAN MOTO ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL ... xix
DAFTAR CONTOH ... xx
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang ... 1
1.2. Tujuan Penulisan Tugas Akhir ... 2
1.3. Manfaat Penulisan Tugas Akhir ... 3
1.4. Batasan Masalah ... 3
1.5. Sistematika Penulisan Tugas Akhir ... 3
2.1.2. Signal Generator ... 6
2.1.2.1. Pulsa Radar ... 6
2.1.3 Signal Processor ... 7
2.1.3.1. Analog to Digital Converter (ADC) 10
2.1.3.2. Matched Filter ... 11
2.1.3.3. Detection Processor ... 12
2.1.3.4. Postprocessor ... 13
2.1.4. Antena ... 13
2.2. Parameter yang Dihitung oleh Radar ... 13
2.2.1. Range dan Resolusi Range ... 14
2.2.2. Doppler Filtering ... 15
2.3. Velocity Processing ... 16
2.3.1. Moving Target Indication (MTI) ... 16
2.3.2. Canceller ... 16
2.3.3. Pergerakan Target ... 17
2.4. Transformasi Fourier Diskret ... 18
2.4.1. Transformasi Fourier ... 18
2.4.2. Discrete Fourier Transform (DFT) ... 19
2.4.3. Fast Fourier Transform (FFT)... 20
2.4.4. Butterfly ... 22
2.4.6.1. Sifat-sifat Operasi Konvolusi ... 33
2.4.6.2. Fast Convolution ... 34
2.5. Layout pada Matlab ... 34
BAB III PERANCANGAN PROGRAM SIMULASI UNTUK VELOCITY PROCESSING DENGAN DOPPLER SHIFT ... 36
3.1. Perancangan Program Pemrosesan Kecepatan ... 36
3.1.1. Merancang Sinyal ... 37
3.1.2. Menentukan Posisi Target ... 40
3.1.3. Menghitung Jarak Target dan Time Travel .... 40
3.1.4. Merancang Sinyal Echo ... 43
3.1.5. Mengubah Sinyal Analog ke Digital ... 43
3.1.6. Mengurangi Noise dengan Matched Filter .... 46
3.1.7. Menghitung Kecepatan Target ... 46
3.2. Layout Program ... 48
BAB IV HASIL DAN PEMBAHASAN ... 50
4.1. Tampilan Program ... 50
4.2. Pembahasan Program ... 54
4.4. Hubungan Antara Perubahan Kecepatan Target Terhadap Frekuensi Doppler dan Sudut yang
Dibentuk Pergerakan Target dengan Radar ... 60
BAB V PENUTUP ... 63
5.1. Kesimpulan ... 63
5.2. Saran ... 63
DAFTAR PUSTAKA LAMPIRAN
Gambar 2.1. Blok diagram dari sistem radar modern ... 5
Gambar 2.2. Bentuk gelombang pulsa ... 7
Gambar 2.3. Ambigu antara sinyal yang dikirim dengan sinyal yang diterima ... 10
Gambar 2.4. a) Masukan matchedfilter merupakan sinyal yang disembunyikan oleh noise ... 11
b) Noise dari keluaran matched filter telah dikurangi . 11 Gambar 2.5. Diagram blok dari subsistem detection processor ... 12
θ Gambar 2.6. Definisi dari saat (a) Menuju ... 17
(b) Menjauh ... 17
(c) Melingkar dengan radius tetap dari sumber ... 17
Gambar 2.7. Sirkuit pembatalan pada MTI processor ... 18
Gambar 2.8. FFT butterfly untuk FFT 8-point ... 23
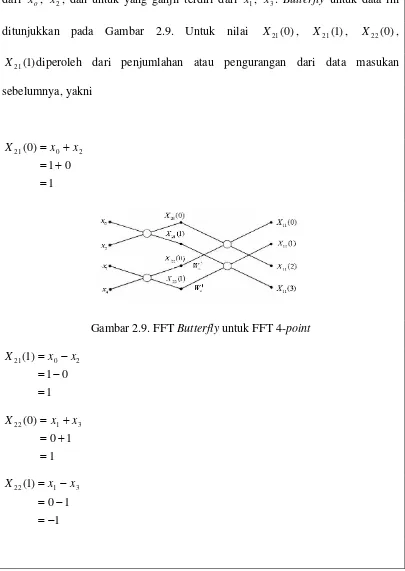
Gambar 2.9. FFT butterfly untuk FFT 4-point ... 24
Gambar 2.10. Bentuk gelombang yang tidak sefase yang dikorelasikan 100 % dengan nol korelasi saat nol lag... 27
Gambar 2.11. Masukan impuls dan tanggapan impuls yang sesuai pada sistem ... 31
Gambar 2.12. Penerapan urutan impuls pada tanggapan sistem yang diperoleh dari masing-masing tanggapan impuls ... 32
Gambar 3.3. Merancang posisi target ... 41
Gambar 3.4. Merancang jarak target dan time travel ... 42
Gambar 3.5. Diagram alir dari perancangan sinyal echo... 44
Gambar 3.6 Diagram alir pengubahan dari Analog ke Digital ... 45
Gambar 3.7. Diagram alir matched filter ... 47
Gambar 3.8. Diagram alir dari proses perhitungan kecepatan ... 48
Gambar 3.9. Layout pada program ... 49
Gambar 4.1. Tampilan awal program ... 50
Gambar 4.2. Tampilan program utama ... 51
Gambar 4.3. Submenu Tentang Kecepatan... 52
Gambar 4.4. Submenu Petunjuk Penggunaan Program ... 53
Gambar 4.5. Pesan kesalahan untuk frekuensi carrier ... 54
Gambar 4.6. Pesan kesalahan untuk PRF lebih besar dari lebar pulsa ... 55
Gambar 4.7. Tampilan untuk sinyal yang dipancarkan ... 55
Gambar 4.8. Tampilan untuk sinyal pancar yang telah diperbesar ... 56
Gambar 4.9. Memasukkan posisi target pada axes ... 56
Gambar 4.10. Pesan peringatan untuk target yang melebihi Range maksimum ... 57 Gambar 4.11. Pesan peringatan untuk masukan yang melebihi jumlah
Gambar 4.14. Grafik hubungan antara perubahan kecepatan Target
terhadap frekuensi carrier dan Frekuensi Doppler ... 59 Gambar 4.15. Grafik hubungan antara frekuensi Carrier yang tidak
stabil dengan frekuensi Carrier yang stabil ... 60 Gambar 4.16. Grafik hubungan antara perubahan kecepatan target
Terhadap frekuensi Doppler dan sudut yang Dibentuk
pergerakan target dengan radar ... 61
Tabel 2.1. Band Frekuensi ... 9
Contoh 2.2. Cross-correlation ... 26 Contoh 2.3. Cross-correlation dengan lag ... 28
1.1. Latar Belakang
Radar merupakan sensor gelombang mikro aktif, yakni sensor yang mempunyai sumber tenaga sendiri. Kata radar merupakan kepanjangan dari Radio Detection And Ranging. Yang sesuai dengan namanya, radar menggunakan gelombang radio untuk mendeteksi target dan menentukan jarak atau posisi. [1]
Prinsip fisika yang mendasari dari pengoperasian sistem radar pertama kali diperagakan oleh Hertz sekitar tahun 1880-an. Eksperimennya membuktikan bahwa gelombang elektromagnet dapat dipantulkan oleh logam, seperti gelombang cahaya yang dipantulkan oleh cermin. Pada tahun 1904, insinyur dari Jerman, Christian Hulsmeyer, memperagakannya dalam pencegahan terhadap terjadinya tabrakan antar kapal. Radar setelah itu tidak dikembangkan lagi sampai tahun 1930-an. Selama Perang Dunia ke II, Inggris menggunakan radar untuk mendeteksi pesawat pengebom Jerman yang mendekat, yang berdasar atas usulan dari Robert Watson Watt pada tahun 1935. [2]
Pada tahun 1950-an, sistem radar yang lebih canggih telah menyebar. Sebagai contoh perkembangannya dalam sistem pertahanan udara antar benua SAGE (semiautomatic ground environment). Sistem ini tidak memakai manusia lagi tetapi dikombinasikan oleh radar, komputer, komunikasi, dan teknologi tampilan, karena manusia tidak dapat bekerja lebih cepat dan tidak dapat lebih akurat. [2], [3]
Dengan bertambahnya waktu, teknologi radar dapat mendeteksi benda kecil dan subyek yang berbeda yang secara tepat dalam penargetannya walau di bawah kondisi yang kurang baik dan dalam waktu yang singkat. Sebagai contoh dalam aplikasi lalu lintas udara atau ATC (Air Traffic Control), navigasi kapal, prakiraan cuaca, pemetaan, astronomi, dan pendeteksi kecepatan mobil oleh polisi. [2]
Secara sederhana, cara kerja dari radar adalah radar mengirimkan sinyal, beberapa sinyal mengenai target dan memantulkannya kembali. Dari sinyal yang diterima terdapat beberapa informasi, yaitu waktu tunda dari sinyal yang dipantulkan target yang mengindikasikan jarak dari radar ke target, pergeseran frekuensi Doppler yang dapat mengetahui kecepatan target. Hasil dari proses ditampilkan pada display.[4]
Kebanyakan radar menggunakan efek Doppler untuk mengetahui kecepatan target. Efek ini menyebabkan frekuensi pantulan dari target dapat meningkat atau menurun, tergantung apakah target sedang bergerak mendekat atau menjauhi radar. Perbedaan frekuensi yang dipancarkan radar dan pantulan yang diterima dapat menentukan kecepatan relatif target dengan radar. [4]
1.2. Tujuan Penulisan Tugas Akhir
1.3. Manfaat Penulisan Tugas Akhir
Manfaat dari penulisan tugas akhir ini adalah:
a. Dapat digunakan sebagai bahan kuliah tentang pemrosesan kecepatan dengan pergeseran Doppler.
b. Referensi yang dapat mendukung pada penelitian selanjutnya.
1.4. Batasan Masalah
Beberapa batasan masalah pada penulisan tugas akhir adalah sebagai berikut:
a. Simulasi yang dibuat hanya terbatas pada pemrosesan kecepatan dengan pergeseran Doppler.
b. Program dibuat menggunakan programMatlab.
c. Sinyal yang dikirim dan diterima tidak mengalami ambigu. d. Frekuensi yang dipancarkan sebatas L-Band dan S-Band. e. Radar bersifat stationary.
f. Terdapat hanya satu target.
g. Tidak ada interferensi oleh sinyal lain.
1.5. Sistematika Penulisan Tugas Akhir
BAB I : Pendahuluan
Berisi tentang latar belakang, tujuan penulisan tugas akhir, manfaat penulisan tugas akhir, batasan masalah, sistematika penulisan tugas akhir.
BAB II : Dasar Teori
Berisi tentang teori-teori yang mendasari penulisan tugas akhir.
BAB III : Perancangan Program
Berisi tentang langkah-langkah perancangan program simulasi untuk pemrosesan kecepatan pesawat terbang dengan pergeseran Doppler.
BAB IV : Analisa
Berisi pembahasan dari program simulasi. BAB V : Kesimpulan dan Saran
2.1. Komponen Dasar dari Sistem Radar
Komponen-komponen utama pada sistem radar modern adalah Data Processing System, Signal Processing, Signal Generator dan antena seperti yang diperlihatkan pada Gambar 2.1.
Control Unit
Data Processing
System
Display Processing Transmit
And Receive Antenna
Signal Processor Signal
Generator
ADC Matched Filter
Detection
Processor Postprocessor
Gambar 2.1. Blok diagram dari sistem radar modern [3]
2.1.1. Data Processing System
Data processing system adalah otak dari sistem radar yang mengontrol semua fungsi. Sebagai contoh, untuk mengontrol dan menentukan posisi antena, mengontrol sinyal dalam signal generator, mengkonfigurasi signal processor, dan lain-lain. Data processing system menerima data yang diproses dari signal
processing dan menghitungnya. Hasil dari pemrosesan ini akan ditampilkan pada sistem penampil dalam display processing.[2], [3]
2.1.2. Signal Generator
Sinyal awal dari signal generator adalah berupa sinyal baseband yang dapat dirumuskan sebagai
(2.1) t
f j o
e t
s( )= 2π
Sinyal ini kemudian diubah menjadi In-phase (I) dan Quadrature (Q). In-phase
merupakan komponen sinyal referensi sedangkan quadrature merupakan komponen sinyal yang digeser sebesar 90° dari frekuensi referensi. Kemudian kedua sinyal ini akan digabungkan dan dimodulasikan dengan sinyal pulsa. Penggabungan sinyal in-phase dan quadrature dirumuskan dalam
(
f t)
Q t(
f t)
tI t
s( )= ( )cos2π o − ( )sin 2π o (2.2)
Frekuensi dan panjang gelombang yang digunakan oleh radar distandarkan secara internasional yang dapat dilihat pada Tabel 3.1.
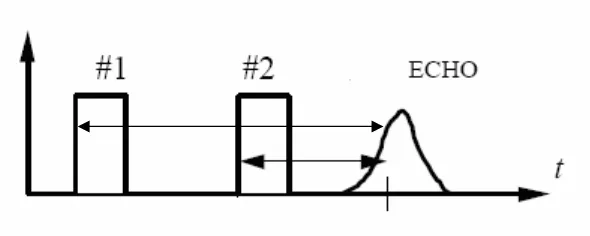
2.1.2.1. Pulsa Radar
Pulsa radar dapat digambarkan seperti Gambar 2.2. Pulsa radar terdiri dari
selanjutnya. PRI biasanya ditentukan dalam frekuensi yakni PRF atau Pulse Repetition Frequency yang diperoleh dari rumus
PRI
PRF = 1 (2.3)
dan N juga ditentukan dalam frekuensi yang dirumuskan sebagai 1/N.
PRI N
Time
Gambar 2.2. Bentuk gelombang pulsa [3]
2.1.3. Signal Processor
Secara umum, terdapat tiga fungsi utama dari signal processing dalam radar modern, yakni mengurangi noise pada sinyal yang diterima dengan matched filter, mencocokan sinyal dengan pendeteksian thresholding, dan menghasilkan
target metrics yang diperlukan (posisi target dalam range, angle, dan velocity). [2], [3] Tugas-tugas dari signal processing adalah [5]:
1. Menggabungkan informasi
bahan bakar atau nomor penerbangan. Pilot juga bisa mengeluarkan sinyal bahaya lewat transponder. Signal processor radar yang ada di bandara mengkombinasikan data ini dengan hasil pengukuran range dan arah sudut serta memetakannya bersama-sama pada tempat yang sesuai dengan lingkup.
2. Pelacakan
Dengan menghubungkan himpunan data yang diperoleh dalam pengamatan, radar dapat menghitung garis vektor penerbangan yang menandai kecepatan pesawat terbang dan posisi untuk periode pengamatan berikutnya. Radar di bandara mampu melacak banyak target secara bersamaan, dan keselamatan penerbangan tergantung pada keandalannya. Sedangkan radar untuk militer menggunakan informasi ini untuk penggunaan senjata atau pemanduan proyektil untuk sasaran.
3. Memisahkan ambiguity dalam range atau pengukuran Doppler
Pada Gambar 2.3., antara sinyal yang dikirim dengan echo yang diterima dapat mengalami ambigu yaitu apakah echo yang diterima berasal dari pulsa sinyal yang pertama atau yang kedua. Untuk mengetahui hal ini, dapat merubah PRF. Dengan pengaturan PRF yang sesuai, ambiguity dapat dihilangkan dan posisi target yang benar dapat ditentukan.
4. Pemetaan ground clutter
dari satelit. Ataupun clutter dapat dihilangkan untuk mengetahui keberadaan target yang tersembunyi di antara clutter.
Tabel 1. Band Frekuensi [6] Band
Frekuensi
Panjang Gelombang
Rentang Frekuensi
Aplikasi
HF 100 – 10 m 3 – 30 MHz Sistem radar koastal, radar
over the horizon (OTH) VHF 1 – 10 m 30 – 300 MHz Ground Penetrating
UHF 0.3 – 1 m 300 – 1000 MHz Peringatan dini peluru balistik
L 15 – 30 cm 1 – 2 GHz Radar ATC (Air Traffic Conrol) dan surveillance
S 7,5 – 15 cm 2 – 4 GHz Radar cuaca, marinir, ATC C 3,75 – 7,5 cm 4 – 8 GHz Radar cuaca
X 2,5 – 3,75 cm 8 – 12 GHz Radar cuaca, marinir, pemetaan
Ku 1, 67 – 2,5 cm 12 -18 GHz Pemetaan
Gambar 2.3. Ambigu antara sinyal yang dikirimkan dengan sinyal yang diterima [7]
5. Meniadakan interferensi
Interferensi dapat berupa gangguan alami atau buatan manusia. Interferensi alami dapat berupa hujan es atau hujan lebat, dan lain-lain. Sedangkan interferensi buatan manusia berupa jamming yang berasal dari peralatan elektronika.
Di dalam signal processing terdapat beberapa sub sistem, yakni ADC (Analog-Digital Converter), Matched Filter, Detection Processor, dan
Postprocessor.
2.1.3.1. Analog-Digital Converter (ADC)
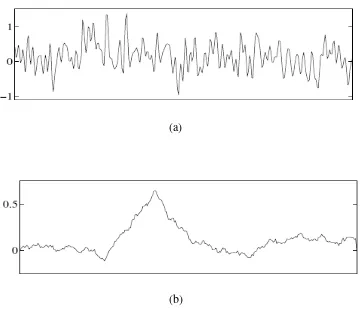
2.1.3.2. Matched Filter
Sinyal yang diterima biasanya telah bercampur dengan noise, sehingga diperlukan filter untuk mengurangi noise tersebut. Filter ini dinamakan matched filter, yang mengurangi noise dengan menggunakan perhitungan dari konvolusi dan korelasi yang dapat dipercepat perhitungannya dengan menggunakan transformasi Fourier. Pada Gambar 2.4 (a) merupakan contoh sinyal yang telah disembunyikan oleh noise dan Gambar (b) noise dari sinyal tersebut dikurangi dengan menggunakan matched filter.
(a)
(b)
2.1.3.3. Detection Processor
Data dari keluaran matched filter akan diproses pada subsistem selanjutnya yaitu disebut sebagai detection processor. Fungsi dari detection processor ini adalah untuk mencocokkan apakah sinyal yang diterima sama seperti sinyal yang dipancarkan. Data dari target yang cocok (yaitu yang melebihi threshold) diambil dan data yang tidak cocok bisa ditolak. Data yang diambil merupakan sinyal yang dipantulkan oleh target. Diagram blok dari struktur detection processor
ditunjukkan dalam Gambar 2.5.
Gambar 2.5. Diagram blok dari subsistem detection processor [2]
untuk menyediakan tingkat threshold. Sehingga tingkat threshold dapat bervariasi untuk menstabilkan false alarm rate. Binary control digunakan untuk mengindikasikan postprocessor untuk mengambil data yang cocok (melebihi
threshold).[2]
2.1.3.4. Postprocessor
Setelah filtering dan pendeteksian, langkah selanjutnya dari pemrosesan adalah postprocessing. Secara umum, langkah ini menggunakan keluaran dari
Detection Processor yang berupa data yang cocok (melebihi threshold) untuk menghasilkan target metrics dan signature information sehingga dapat mengetahui target yang sesungguhnya. Postprocessor berfungsi saat detection processor menghadapi sejumlah besar target atau clutter selama pencarian. [2]
2.1. 4. Antena
Antena adalah perangkat untuk mengirim dan menerima energi radio frequency (RF). Antena terdiri dari perangkat keras pengirim, modulator dan perangkat keras penerima. [2]
2.2. Parameter yang Dihitung oleh Radar
2.2.1. Range dan Resolusi Range
Pengukuran range dalam radar adalah sebanding dengan pengukuran waktu.
Range maksimum Rmax diberikan oleh rumus
2 max
PRI c
R = × (2.4)
dengan c adalah kecepatan cahaya (≅3×108m/detik) dan PRI adalah interval pengulangan pulsa. Dari persamaan 2.4, dapat pula ditentukan time travel
dengan persamaan
c R
T = 2 (2.5)
Resolusi range merupakan perhitungan untuk dua target yang berdekatan satu sama lain yang bisa dilacak oleh radar. Hal ini diperlukan agar sinyal yang dipantulkan dari kedua target yang berdekatan tersebut tidak bisa menjadi target tunggal saat diterima oleh radar. Resolusi range dirumuskan sebagai:
2
N c R= ×
Δ (2.6)
2.2.2. Doppler Filtering
Doppler filtering dari informasi target didasarkan pada efek Doppler. Penentuan dari kecepaan target melibatkan pengukuran pergeseran frekuensi, yang dapat dirumuskan: [9]
θ λ
θ
cos 2
cos 2
v c vf
f o
d − =
− =
(2.7)
dengan fo adalah frekuensi carrier, adalah kecepatan target, v λ adalah panjang gelombang (c= foλ), fd adalah hasil pergeseran frekuensi yang diterima, dan θ adalah sudut yang dibentuk antara sumber dengan arah dari pergerakan.
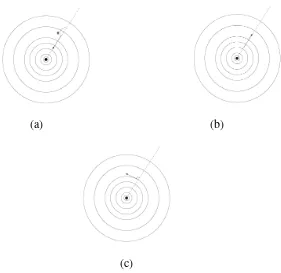
Gambar 2.6. menunjukkan target yang bergerak menuju, menjauhi atau melingkar dengan radius yang sama dengan sumber. Yang apabila target bergerak menuju sumber, maka sudut θ yang terbentuk adalah 90°≤θ ≤180°. Sehingga cos θ bernilai negatif dan bernilai positif. Dengan demikian mengalami peningkatan frekuensi. Begitu juga sebaliknya, apabila target bergerak menjauhi sumber, maka sudut
d
f fd
θ yang terbentuk adalah 0°≤θ ≤90°. Sehingga cos θ
bernilai positif dan bernilai negatif. Dan mengalami penurunan frekuensi. Apabila target bergerak melingkar dengan radius tetap, maka arah pergerakan akan tegak lurus dengan sumber. Sehingga sudut
d
f fd
θ yang terbentuk sebesar 90º
Pengukuran pergeseran Doppler dapat dipenuhi dengan analisis spektrum dan resolusi kecepatan yang ditentukan oleh sudut, yang dua sinyal saat frekuensi yang berbeda dapat dibedakan. Resolusi kecepatan dapat ditingkatkan dengan menambah frekuensi dari pembawa RF dan mengurangi panjang gelombang.
2.3. Velocity Processing
2.3.1. Moving Target Indication (MTI)
Aplikasi dari radar mengenai pemrosesan kecepatan tercakup dalam moving target indication (MTI). Sistem MTI ini mengukur perubahan fase antara sinyal yang dikirim dan sinyal yang kembali untuk menentukan gerakan dari target, atau bisa disebut juga dengan menggunakan efek Doppler, sehingga dapat membedakan antara target yang bergerak dan diam. Karena MTI digunakan hanya untuk target yang bergerak saja, maka target yang diam dapat dihilangkan. [2], [10]
2.3.2. Canceller
(a) (b)
(c)
Gambar 2.6. Definisi dari θ saat a) menuju b) menjauhi c) melingkar dengan radius tetap dari sumber [9]
2.3.3. Pergerakan Target
dalam jarak sebesar 30 meter. Maka kecepatan target dapat diketahui dengan
membagi jarak tempuh target dengan waktu, yakni
detik meter 10 detik 0 3
meter 30
=
− .
Gambar 2.7. Sirkuit pembatalan pada MTI processor [10]
2.4. Transformasi Fourier Diskret
Agar matched filter dapat melakukan perhitungan dengan kecepatan tinggi maka diperlukan suatu transformasi yang dapat melakukan perhitungan dengan cepat. Dalam hal ini Fast Fourier Transform (FFT) digunakan oleh sistem radar, karena kecepatan perhitungannya.[2], [11], [12], [13], [14]
2.4.1. Transformasi Fourier
∫
∞ ∞ − − ==F j f t e dt d
d ω jωt
π ω ω ) ( ) ( 2 / ) ( (2.8)
Dan inverse dari transformasi Fourier sebagai
(2.9)
∫
∞
∞ −
= F j e df t
f( ) ( ω) jωt
Dengan j adalah akar dari -1 dan adalah bilangan eksponensial e
(2.10) )
sin( )
cos(φ φ
φ
j ej = +
2.4.2. Discrete Fourier Transform (DFT)
Data yang ditransformasikan merupakan diskrit dan tidak periodis. DFT dari deretan x(nT) dengan adalah jumlah n sample dan T adalah interval
sampling untuk menghasilkan deret sample sebanyak digambarkan sebagai deretan nilai kompleks
N
) (kΩ
X pada kawasan frekuensi, dengan adalah frekuensi harmonik. pada umumnya mempunyai komponen real dan imajiner sehingga untuk harmonik ke- diberikan oleh rumus
Ω
) (kΩ X k ) ( ) ( )
(k R k jI k
Jadi data real (dalam kawasan waktu) ditransformasikan menjadi data kompleks (dalam kawasan frekuensi). Nilai DFT, , diberikan oleh rumus
N N
) (k X
;k=0, 1, …., (2.12)
∑
− = Ω − = 1 0 ) ( ) ( N n nT jk e nT x kX N −1
dengan adalah jumlah harmonik dari komponen transformasi. Dan inverse dari transformasi DFT didefinisikan sebagai
k
∑
− = Ω = 1 0 ) ( 1 ) ( N k nT jk e k X N nTX ;n=0,1, …, N −1 (2.13)
2.4.3. Fast Fourier Transform (FFT)
Algoritma yang lebih cepat telah dikembangkan oleh Cooley dan Tukey sekitar tahun 1965 yang disebut FFT (Fast Fourier Transform). Ketika diterapkan dalam kawasan waktu, algoritma ditunjukkan sebagai Decimation in Time (DIT) FFT. Decimation kemudian menunjuk ke pengurangan yang signifikan dalam jumlah perhitungan yang diterapkan pada kawasan waktu. Pengurangan
perhitungan yang terjadi bisa mengenai N2 N log2 N
2
− kali. Dari persamaan 2.12
dapat ditulis sebagai
;k= 0, …., (2.14)
∑
− = − = 1 0 / 2 1( )N n N nk j ne x k
Jika weighting/twiddle factor
(2.15)
N j N e
W = − 2π/
maka persamaan 2.14 menjadi
;k= 0, …., (2.16) kn N N n nW x k X
∑
− = = 1 01( ) N−1
Beberapa relasi WN adalah
(2.17) K N N k N N N N j N W W W W e W − = = = + − ) 2 / ( 2 / 2 / 2π
Untuk menggunakan persamaan 2.16 di atas, urutan data dapat dibagi menjadi dua urutan yang sama panjang, yakni data nomor genap dan data nomor ganjil. Agar urutan menjadi sama panjang, maka data harus berjumlah genap, jika urutan data ganjil, maka diperlukan penambahan nol. dapat ditulis dalam 2 DFT yaitu untuk deretan data genap dan untuk deretan data ganjil. -point DFT diubah menjadi 2 DFT masing-masing . Proses berulang sampai
terbagi menjadi DFT masing-masing 2 point. Persamaan 2.16 dapat ditulis menjadi ) ( 1 k X ) ( 11 k
X X12(k) N
2 / N ) ( 1 k
;
∑
∑
∑
∑
− = − = + − = + + − = + = + = 1 2 / 0 1 2 / 0 2 1 2 2 2 1 2 / 0 ) 1 2 ( 1 2 1 2 / 0 2 2 1 sequence odd sequence even ) ( N n N n nk N n k N nk N n N n k n N n N n nk N n W x W W x W x W x k X 4 4 3 4 4 2 1 43 42 1 1 ,..., 0 − = Nk (2.18)
Menggunakan persamaan 2.17, , sehingga persamaan 2.18 di atas
menjadi
nk N nk
N W
W2 = /2
;
∑
−∑
= − = = + += /2 1
0 1 2 / 0 2 / 1 2 2 / 2 ) ( N n N n n nk N n k N nk N
nW W x W
x k
X k =0,...,N−1 (2.19)
Persamaan 2.19 dapat disederhanakan menjadi
; ) ( ) ( )
( 11 12
1 k X k W X k
X = + Nk k =0,...,N−1 (2.20)
2.4.4. Butterfly
Gambar 2.8 merupakan contoh penggambaran dari FFT 8-point yang biasa disebut dengan istilah butterfly. Data dari kawasan waktu ( akan
dirubah menjadi data berkawasan frekuensi . Persamaan pada Gambar 2.8 diperoleh dari
) ,...., , 1 7
0 x x
x ) 7 ( ),...., 1 ( ), 0
( 1 1
1 X X
X ) ( 21 k X ; 4 4 / 0
21(k) x W x
Gambar 2.8. FFT butterfly untuk FFT 8-point [11]
Begitu juga untuk persamaan menggunakan cara
yang sama dengan persamaan 2.21 di atas. Persamaan diperoleh dari penggabungan hasil perhitungan dari persamaan sebelumnya, yakni
) ( ), ( ),
( 23 24
22 k X k X k
X
) (
11 k X
; 3
) ( )
( )
( 21 /2 22
11 k X k W X k
X = + Nk k =0,1,2, (2.22)
Contoh 2.1:
Terdapat empat nilai tegangan tersampling dengan urutan {1, 0, 0, 1}. Dari data tersebut dapat diketahui nilai DFT yang diperoleh dengan FFT.
Urutan data tersebut didefinisikan menjadi xo= 1, x1= 0, x2= 0, x3= 1.
menjadi 4/2 DFT, dan mempunyai hasil masing-masing 2 poin DFT Data tersebut akan dipisiahkan menjadi dua, genap dan ganjil. Untuk yang genap terdiri dari xo, x2, dan untuk yang ganjil terdiri dari x1, x3. Butterfly untuk data ini
ditunjukkan pada Gambar 2.9. Untuk nilai X21(0), X21(1), X22(0),
) 1 (
21
X diperoleh dari penjumlahan atau pengurangan dari data masukan sebelumnya, yakni 1 0 1 ) 0
( 0 2
21
= + =
+
= x x
X
Gambar 2.9. FFT Butterfly untuk FFT 4-point
1 0 1 ) 1
( 0 2
21
= − =
−
=x x
X 1 1 0 ) 0
( 1 3
22
= + =
+
=x x
X 1 1 0 ) 1
( 1 3
22 − = − = −
=x x
Hasil akhir dari data ini adalah X11(0), X11(1), X11(2), X11(3) yang diperoleh dari 2 1 1 1 1 ) 0 ( ) 0 ( ) 0 ( 0 0 ) 4 / 2 ( 22 0 4 21 11 = + = + = + = − e e X W X X j π 0 1 1 1 1 ) 0 ( ) 0 ( ) 1 ( 0 0 ) 4 / 2 ( 22 0 4 21 11 = − = − = − = − e e X W X X j π j e e X W X X j j − = + = + = + = − − 1 1 1 1 1 ) 1 ( ) 1 ( ) 2 ( 2 / 1 ) 4 / 2 ( 22 1 4 21 11 π π j e e X W X X j j + = − = − = − = − − 1 1 1 1 1 ) 1 ( ) 1 ( ) 3 ( 2 / 1 ) 4 / 2 ( 22 1 4 21 11 π π
Jadi nilai DFT yang diperoleh dengan cara FFT untuk data {1, 0, 0, 1} adalah {2, 0, (1− j), (1+ j)}
2.4.5. Korelasi
korelasi bisa diperoleh dengan menjumlahkan hasil pasangan poin-poin yang sesuai dari poin-poin dua bentuk gelombang. Cross-correlation antara dua urutan data dan masing-masing berisi data dapat ditulis sebagai
) ( 12 n r ) ( 1 n
x x2(n) N
(2.23)
∑
− = = 1 0 2 112 ( ) ( )
N n n x n x r
Definisi dari cross-correlation ini, diperoleh hasil yang tergantung pada banyaknya sampling point yang diambil sehingga dapat dirumuskan seperti pada persamaan di bawah ini dan dapat dicontohkan pada Contoh 2.2.
∑
− = = 1 0 2 112 ( ) ( )
1 N n n x n x N
r (2.24)
Contoh 2.2:
Terdapat jumlah urutan data n, dan urutannya adalah x1 dan x2. Maka perhitungan r12 adalah
n 1 2 3 4
1
x 4 2 -1 3
2
x -4 1 3 7
Apabila gelombang yang satu dengan gelombang yang lain tidak sefase, yang ditunjukkan pada Gambar 2.10, maka untuk mengatasi perbedaan fase tersebut diperlukan pergeseran, atau lag, dari salah satu bentuk gelombang. Yang dapat dirumuskan sebagai
∑
−=
−
= 1
0
2 1
12 ( ) ( )
1 ) (
N n
j n x n x N j
r , j =0 ,±1 ,±2,... (2.25)
Dapat dilihat pada Contoh 2.3, dimana merupakan urutan referensi dan merupakan urutan waktu yang digeser, dan parameter
1 x
2
x j disebut dengan lag
yang merupakan jumlah sampling points oleh yang telah digeser ke kiri yang mengindikasikan time-shift antar pasangan. Urutan digeser ke kanan oleh
sample
2 x
2 x
j untuk nilai positif dari j, dan digeser ke kiri oleh sample j untuk nilai negatif dari j.
Contoh 2.3:
Cross-correlation dari dua urutan data x1(n) dan x2(n) saat lag j=3. Maka
) 3 (
12
r adalah
n 1 2 3 4 5 6
1
x 4 2 -1 3 -2 -6
2
x 7 4 -2
(
) (
) (
(
)
33 . 6 2 1 4 2 7 4 6 1 ) 3 ( 12)
= − × − + × + × = rApabila dan adalah berkebalikan dari uraian di atas yakni adalah urutan waktu yang digeser dan merupakan urutan referensi, maka rumusan
cross-correlation diberikan oleh rumus 1
x x2 x1
2 x ) ( 12 1 0 2 1 0 1 2 21 ) ( ) ( 1 ) ( ) ( 1 ) ( j N n N n r n x j n x N j n x n x N j r − − = − = = + = − =
∑
∑
(2.26)Apabila , bentuk gelombang kemudian mengalami cross-correlation dengan dirinya sendiri. Proses ini dikenal sebagai autocorrelation
yang dirumuskan oleh
) ( )
( 2
1 n x n
x =
∑
− = + = 1 0 1 111 ( ) ( )
1 ) ( N n j n x n x N j
r (2.27)
Apabila pada rumus di atas j=0, maka akan diperoleh persamaan
S n x N r N n = =
∑
− = ) ( 1 ) 0 ( 1 0 2 111 (2.28)
dimana S adalah energi dari x1. [11], [14]
2.4.5.1. Fast Correlation
Perhitungan korelasi bisa dipercepat dengan memanfaatkan teori korelasi, biasanya dinyatakan sebagai
[
( ) ( )]
1 )
( 1 1* 2
12 F X k X k
N j
r = D− (2.29)
dimana dinotasikan sebagai inverse discrete Fourier transform (IDFT). Pendekatan ini membutuhkan perhitungan dari dua discrete Fourier transform
(DFT) dan satu IDFT. [10] 1
− D
2.4.6. Konvolusi
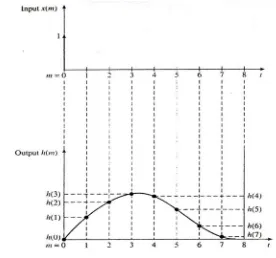
Istilah konvolusi menjelaskan bagaimana masukan ke sistem saling berhubungan dengan sistem untuk menghasilkan keluaran. Umumnya keluaran sistem akan ditunda dan dilemahkan atau dikuatkan dari masukan yang berguna untuk mempertimbangkan keluaran dari sistem. Keluaran pada sistem yang dikarenakan masukan impuls tidak akan menjadi impuls yang sesuai, tetapi akan berbeda menurut waktu, seperti yang ditunjukkan pada Gambar 2.11. Gambar ini menunjukkan bahwa saat sampling ke- , keluaran yang dikarenakan unit impulse
diterapkan saat sampling ke-0 yaitu . Karakteristik ini dikenal sebagai tanggapan impuls pada sistem.
m ) (m h ) (m h
Aplikasi dari urutan dari impuls ke sistem, diterapkan saat sampling
ke- . Menurut Gambar 2.12, ouput saat 0 adalah yang diberikan oleh )
(m x
m y(0)
) 0 ( ) 0 ( ) 0
( h x
y = (2.30)
Saat sampling keluaran dirumuskan oleh , efek pada arus masukan , ditambah efek tunda pada masukan yang diterapkan saat
sampling . Dengan demikian
1
=
m h(0)x(1)
) 1 (
x h(1)x(0)
0 = m ) 1 ( ) 0 ( ) 0 ( ) 1 ( ) 1
( h x h x
y = + (2.31)
) ( ) 0 ( ... ) 1 ( ) 1 ( ) 0 ( ) ( ) ( ) 3 ( ) 0 ( ) 2 ( ) 1 ( ) 1 ( ) 2 ( ) 0 ( ) 3 ( ) 3 ( ) 2 ( ) 0 ( ) 1 ( ) 1 ( ) 0 ( ) 2 ( ) 2 ( n x h x n h x n h n y x h x h x h x h y x h x h x h y + + − + = + + + = + + =
M (2.32)
Gambar 2.11. Masukanimpuls dan tanggapan impuls yang sesuai pada sistem [11]
Keluaran diperoleh dari mengalikan urutan masukan dengan poin-poin dari fungsi tanggapan waktu time-reversed yang sesuai. Sehingga persamaan 2.32 dapat ditulis sebagai
) 0 ( ) ( ... ) 1 ( ) 1 ( ) ( ) 0 ( )
(n h x n h x n h n x
Gambar 2.12. Penerapan urutan impuls dan tanggapan sistem yang diperoleh dari masing-masing tanggapan impuls [11]
Keluaran di sini merupakan hasil dari pasangan poin-poin yang sesuai dalam fungsi tanggapan impuls oleh urutan time-reversed masukan. Persamaan 2.32 dan 2.33 dapat dirumuskan dalam
Kedua fungsi ini kemudian dikenal sebagai penjumlahan konvolusi pada masukan dengan fungsi tanggapan impuls, dan keluaran dihasilkan oleh konvolusi dari masukan dengan tanggapan impuls pada sistem.
Persamaan 2.34 dan 2.35 bisa digunakan untuk bentuk gelombang dari durasi yang tanpa batas dengan merumuskannya dalam
(2.36) ) ) ( ) ( ) ( ) ( )
(n x m h n m x n h n y m ⊗ = − =
∑
∞ −∞ = dan (2.37) ( ) ( ) ( ) ( )(n h m x n m h n x n y m ⊗ = − =
∑
∞ −∞ =Dalam persamaan ini simbol ⊗ menandakan operasi konvolusi. [11]
2.4.6.2. Sifat-Sifat Operasi Konvolusi 1. Komutatif ) ( ) ( ) ( )
( 2 2 1
1 t x t x t x t
x ⊗ = ⊗ (2.38)
2. Distributif ) ( ) ( ) ( ) ( )] ( ) ( [ )
( 2 3 1 2 1 3
1 t x t x t x t x t x t x t
x ⊗ + = ⊗ + ⊗ (2.39)
3. Asosiatif ) ( )] ( ) ( [ )] ( ) ( [ )
( 2 3 1 2 3
1 t x t x t x t x t x t
2.4.6.2. Fast Convolution
Sama halnya dalam perhitungan korelasi yang dapat dipercepat dengan menggunakan teori korelasi, konvolusi juga dapat dipercepat dengan menggunakan teori konvolusi. Dengan begitu, di dalam istilah diskret dan untuk kawasan waktu
(2.41) x1(l) x2(r) FD1[X1(k)X2(k)] −
= ⊗
Persamaan 2.41 merupakan teori konvolusi, di mana menandakan inverse discrete Fourier transform (IDFT), merupakan discrete fourier transform
(DFT) dari , dan merupakan discrete Fourier Transform (DFT) dari , dan adalah urutan periodik dari panjang N. [11]
1
− D
F
) (
1 k X
) (
1 l
x X2(k)
) (
2 r
x x1(l) x2(r)
2.5. Layout pada Matlab
Perancangan pada program simulasi ini menggunakan program Matlab, yang mempunyai layout terdiri dari
1. Pushbutton
Pushbutton merupakan jenis kontrol berupa tombol tekan yang akan menghasilkan sebuah tindakan jika diklik
2. Edit Text
3. Static Text
Kontrol static text akan menghasilkan teks bersifat statis (tetap), sehingga pengguna tidak dapat melakukan perubahan padanya.
4. Slider
Slider merupakan komponen GUI yang dapat bergeser secara horisontal maupun vertikal.
5. Frames
Frame merupakan kotak tertutup yang dapat digunakan untuk mengelompokkan kontrol yang berhubungan.
6. Popup Menu
Popup menu membuka tampilan daftar pilihan saat pengguna mengklik tanda panah pada aplikasi.
7. Axes
PEMROSESAN KECEPATAN PESAWAT TERBANG
DENGAN PERGESERAN DOPPLER
3.1. Perancangan Program Pemrosesan Kecepatan
Program ini dirancang untuk mengukur kecepatan dari target yang bergerak menggunakan program Matlab. Algoritma perancangan program ini ditunjukkan pada Gambar 3.1.
Proses awal dari program simulasi untuk pemrosesan kecepatan pesawat terbang dengan pergeseran Doppler adalah merancang pemancaran sinyal. Selanjutnya pengguna menentukan posisi target yang dapat ditentukan lewat axis
pada layout program. Kemudian sinyal dipancarkan, mengenai target dan selanjutnya program menghitung jarak target dan time travel merancang sinyal yang dipantulkan oleh target yang bergerak beserta noise. Setelah menerima sinyal yang dipantulkan dari target, sinyal tersebut diubah dari analog menjadi digital untuk diproses di dalam matched filter untuk mengurangi noise. Setelah itu diperoleh hasil sinyal tanpa noise dan melakukan proses perhitungan untuk mengetahui kecepatan dari target.
3.1.1. Merancang Sinyal
Tahap awal dari progam ini adalah merancang pemancaran sinyal yang diagram alirnya diperlihatkan pada Gambar 3.2. Pengguna terlebih dahulu
memasukkan data yang berupa jenis band frekuensi yang terdiri dari L-Band dan S-Band yang rentang frekuensi dan panjang gelombang ditunjukkan pada Tabel 2.1, salah satu dari frekuensi carrier atau panjang gelombang yang rentangnya diperoleh dari jenis band yang dipilih, PRF atau Pulse Repetition Frequency dan
N atau lebar pulsa.
Apabila yang pengguna masukkan berupa frekuensi carrier maka selanjutnya program akan melihat apakah frekuensi tersebut berada dalam rentang frekuensi pada band frekuensi, apabila tidak berada dalam rentang, program akan meminta pengguna memasukkan data lagi, apabila berada pada rentang program akan menghitung panjang gelombang, menampilkannya, dan menuju ke proses selanjutnya. Apabila yang dimasukkan berupa panjang gelombang maka program akan melihat apakah panjang gelombang tersebut berada dalam rentang panjang gelombang pada band frekuensi, apabila tidak berada dalam rentang, program akan meminta pengguna memasukkan data lagi, apabila berada pada rentang program akan menghitung frekuensi, menampilkannya, dan menuju ke proses selanjutnya.
Selanjutnya program akan melihat data yang dimasukkan pengguna, apabila PRF lebih besar dari N maka program akan meminta pengguna memasukkan data lagi, dan jika PRF kurang dari N maka program akan menghitung PRI atau Pulse Repetition Interval, dan membuat deretan pulsa dari spesifikasi yang pengguna masukkan.
Pemancaran sinyal ini dibutuhkan pembangkit sinyal baseband yang dirumuskan pada persamaan 2.1. Sinyal baseband ini kemudian diubah menjadi
pengguna masukkan. Hasil keluaran berupa sinyal pancar ditampilkan ke penampil yang berupa axis dan menampilkan juga jarak maksimum dari radar.
PRF PRI= 1
2
max c PRI
R = ×
λ λ
λ
λ λ
3.1.2. Merancang Posisi Target
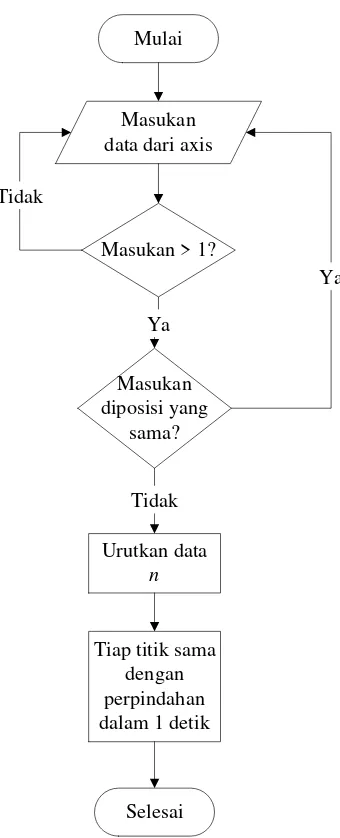
Posisi target ditentukan oleh pengguna dengan memilih posisi di dalam axis pada layout program. Titik-titik yang dimasukkan oleh pengguna merupakan jarak perpindahan target yang tiap titiknya telah diurutkan oleh program. Tiap titik target pada plot digambarkan sebagai tiap detik pergerakan target. Sehingga semakin jauh jarak antara titik yang satu dengan titik selanjutnya maka semakin cepat kecepatan target. Diagram alir ini diperlihatkan pada Gambar 3.3.
Selama pengguna menentukan posisi dari target, program mengurutkan lokasi target sesuai dengan urutan yang pengguna masukkan dan program juga menentukan waktu pergerakan target dari titik satu ke titik berikutnya yakni satu detik.
3.1.3. Menghitung Jarak Target dan Time Travel
Proses selanjutnya adalah menghitung jarak target yang dapat diketahui dengan persamaan pithagoras. Setelah diperoleh jarak target, program akan menghitung waktu tempuh sinyal (waktu antara pemancaran sinyal dan penerimaan sinyal) dengan persamaan 2.5. Diagram alir proses ini ditunjukkan pada Gambar 3.4.
kembali. Apabila masukkan sudah benar program akan memanggil nilai x dan y
dari axis sesuai dengan data yang pengguna masukkan.
Mulai
Masukan data dari axis
Tiap titik sama dengan perpindahan dalam 1 detik
Selesai Ya
Urutkan data n Masukan > 1? Tidak
Masukan diposisi yang
sama?
Ya
Tidak
Gambar 3.3. Merancang posisi target
memasukkan data kembali. Apabila berada pada kawasan radar maka program akan menghitung time travel dari jarak target tersebut dan menampilkan jarak target, dan time travel.
2 2
y x Rt= +
s m c=3×108 / max
R Rt>
c R Tt=2× max
n t= n
ke≤ ≤
1
3.1.4. Merancang Sinyal Echo
Setelah program menentukan posisi target, program selanjutnya merancang sinyal echo. Sinyal echo merupakan sinyal yang telah dipantulkan oleh target yang menuju ke radar yang bergeser oleh frekuensi dan waktu. Pada Gambar 3.5 memperlihatkan diagram alir dari perancangan sinyal echo.
Program membandingkan antara Rt dan R(t+1), apabila Rt > R(t+1) maka arah gerak target menjauh, apabila Rt < R(t+1) maka arah gerak target menjauh. Apabila masukan dari pengguna sama dengan jumlah target maka sudah tidak ada pergerakan target, dan apabila Rt = R(t+1) maka pergerakan target adalah melingkar. Setelah itu program menghitung frekuensi Doppler dan hasilnya dijumlahkan dengan frekuensi carrier yang hasilnya merupakan frekuensi echo. Selanjutnya program membuat derean pulsa dengan time travel Tt dan membuat sinyal echo. Setelah itu sinyal echo dan deretan pulsa digabungkan dan dicampur dengan white gaussian noise dan kemudian ditampilkan ke axes penampil dan juga menampilkan frekuensi Doppler.
3.1.5. Mengubah Sinyal Analog ke Digital
c fo t R Rt
fD =2( − ( +1))×
D R fo f
f = +
D
f
Gambar 3.5. Diagram alir dari perancangan sinyal echo
Sebagai masukan pada proses ini adalah sinyal echo, kemudian sinyal echo
Sinyal dari in-phase dan quadrature akan di-sampling, dan dikuantisasi. Hasil dari pengubahan dari analog ke digital ini akan diproses dalam macthed filter.
I Q arctan
=
θ
3.1.6. Mengurangi Noise dengan Matched Filter
Fungsi dari matched filter adalah untuk mengurangikan noise dengan cara memaksimalkan signal to noise ratio (SNR) dengan cara mencari tanggapan
impulse untuk dapat melakukan perhitungan konvolusi. Perhitungan korelasi digunakan untuk mendeteksi dan memperkirakan sinyal yang tersembunyi di dalam noise dengan membandingkan antara sinyal yang dipancarkan dengan sinyal yang diterima. Diagram alir pada proses ini ditunjukkan pada Gambar 3.7.
Program pertama kali akan memanggil sinyal yang berasal dari ADC kemudian program menghitung tanggapan impuls h(t). Hasil dari tanggapan impuls ini akan dikonvolusikan dengan sinyal yang masuk. Setelah itu program akan mengkorelasikan sinyal yang masuk dengan sinyal referensi yang dapat dilihat pada persamaan 2.24. Hasilnya berupa sinyal tanpa noise yang kemudian ditampilkan ke penampil.
3.1.7. Menghitung Kecepatan target
Setelah proses macthed filter selesai, maka proses selanjutnya adalah proses pengukuran kecepatan. Proses ini dapat dilihat pada Gambar 3.8. Program akan menghitung kecepatan target, yang frekuensi Doppler diperoleh dari frekuensi yang diterima oleh radar, dan θ diperoleh dari sudut yang dibentuk oleh
) (t h
) (t y
) (n r
θ
cos 2 ×
× =
fo c f v D
6 . 3 * v v=
Gambar 3.8. Diagram alir dari proses perhitungan kecepatan.
3.2. Layout Program
Program pada simulasi ini digunakan untuk menentukan kecepatan target dengan efek Doppler. Pada gambar 3.9 menampilkan layout dari program ini.
diterima. Setelah pengguna selesai memasukkan masukannya, maka pengguna dapat menekan tombol tampil untuk menjalankannya program ini.
4.1. Tampilan Program
Program simulasi ini dapat dijalankan menggunakan program Matlab. Saat program dijalankan pertama kali, pengguna akan melihat tampilan pembuka yang ditunjukkan pada Gambar 4.1.
Gambar 4.1. Tampilan awal program
Tampilan awal ini terdiri dari judul program, logo universitas, tombol masuk, tombol keluar dan nama penyusun. Tampilan awal ini mempunyai dua
masukan berupa tombol Masuk untuk masuk ke program utama dan tombol
Keluar untuk keluar dari program.
Gambar 4.2 menunjukkan tampilan program utama yang terdiri dari menu, panel masukan, panel keluaran, serta axes.
Gambar 4.2. Tampilan program utama
Menu program terdiri dari Berkas dan Bantuan. Submenu dari Berkas terdiri dari Buka untuk membuka data-data yang tersimpan, Simpan untuk menyimpan data dengan berekstensi .mat, Cetak untuk mencetak hasil ke printer, dan Keluar
Sedangkan submenu dari Bantuan yang ditunjukkan pada Gambar 4.3 dan Gambar 4.4, terdiri dari Tentang Kecepatan yang memberikan keterangan singkat mengenai pemrosesan kecepatan dengan pergeseran Doppler, dan Petunjuk Penggunaan Program yang memberikan keterangan singkat mengenai langkah-langkah penggunaan program.
Gambar 4.3. Submenu Tentang Kecepatan
Bantuan. Menu Berkas yang dapat digunakan oleh pengguna hanya submenu
Cetak untuk mencetak dan submenu Keluar untuk keluar dari Bantuan. Sedangkan submenu Buka dan submenu Simpan dinonaktifkan karena pada
Bantuan tidak dapat digunakan untuk membuka dan menyimpan data. Menu
Bantuan yang dapat digunakan oleh pengguna hanya submenu Petunjuk Penggunaan Program dan submenu Tentang Kecepatan dinonaktifkan karena submenu Tentang Kecepatan sedang dibuka.
Gambar 4.4. Submenu Petunjuk Penggunaan Program
Submenu Petunjuk Penggunaan Program terdiri dari tombol Keluar,
Bantuan. Menu Berkas yang dapat digunakan oleh pengguna hanya submenu
Cetak dan submenu Keluar, sedangkan submenu Buka dan submenu Simpan
dinonaktifkan karena pada Petunjuk Penggunaan Program tidak dapat digunakan untuk membuka dan menyimpan data. Untuk menu Help yang dapat digunakan oleh pengguna hanya submenu Tentang Kecepatan dan submenu Petunjuk Penggunaan Program dinonaktifkan karena submenu Petunjuk Penggunaan Program sedang dibuka.
4.2. Pembahasan Program
Program dapat berjalan apabila pengguna telah memasukkan data pada panel masukan dan sesuai dengan syarat-syarat yang telah ditentukan dan diperlihatkan pada program’s help. Gambar 4.5 merupakan salah satu contoh pesan kesalahan yang ditampilkan oleh program apabila pengguna belum memasukkan data positif atau data berupa karakter.
Gambar 4.5. Pesan kesalahan untuk frekuensi carrier
Program juga akan menampilkan pesan kesalahan apabila pada masukan PRF
Gambar 4.6. Pesan kesalahan untuk PRF lebih besar dari lebar pulsa
Pengguna memasukkan data-data ke masukan dan program akan melihat apakah masukan sudah sesuai syarat. Program kemudian menampilkan bentuk sinyal yang dipancarkan seperti yang ditampilkan pada Gambar 4.7. Gambar 4.8. menunjukkan sinyal pancar yang telah diperbesar. Pengguna dapat menentukan target pada axes seperti yang ditampilkan pada Gambar 4.9.
630 640 650 660 670 680 690 700 -1
-0.5 0 0.5 1
Time (1e-7)
Am
pl
it
u
d
e
Gambar 4.8. Tampilan untuk sinyal pancar yang telah diperbesar
Untuk mengetahui hasil dari perpindahan target yang telah dimasukkan, pengguna dapat memasukkan nilai numerik dalam edit text pada Jarak Target ke-. Program akan menampilkan pesan peringatan apabila pengguna memasukkan data pada axes melebihi Range maksimum seperti yang ditunjukkan pada Gambar 4.10. Program juga akan menampilkan pesan peringatan apabila pengguna memasukkan nilai numerik dalam edit text pada Jarak Target ke- melebihi target maksimal yang telah dimasukkan oleh pengguna pada axes seperti yang ditunjukkan pada Gambar 4.11. Hasil akhir dari program simulasi ini ditunjukkan pada Gambar 4.12 yang terdiri dari jarak antara radar dengan target, time travel,
keceatan target, frekuensi doppler dan sinyal yang diterima oleh radar. Gambar 4.13 menunjukkan sinyal yang diterima oleh radar.
Gambar 4.10. Pesan peringatan untuk target yang melebihi Range maksimum
Gambar 4.12. Hasil akhir dari program simulasi
850 900 950 1000 1050 1100
-3 -2 -1 0 1 2 3
Time (1e-7)
A
m
p
lit
u
d
e
4.3. Hubungan Antara Perubahan Kecepatan Target Terhadap Frekuensi Doppler dan Frekuensi Carrier
Gambar 4.14. menunjukkan perubahan kecepatan target terhadap frekuensi Doppler dan frekuensi carrier dengan sudut yang dibentuk antara radar dengan pergerakan target tetap yakni 180°.
Fc=1 GHz
Fc=2 GHz
Fc=3 GHz
Fc=4 GHz
0 50 100 150 200 250 300
0 500 1000 1500 2000
Ke
ce
p
a
ta
n
(m
/
s)
Frekuensi Doppler (Hz)
Gambar 4.14. Grafik hubungan antara perubahan kecepatan target terhadap frekuensi carrier dan frekuensi Doppler
Gambar 4.15. Grafik hubungan antara frekuensi Carrier yang tidak stabil dengan frekuensi Carrier yang stabil
Dari Gambar 4.15., diperoleh nilai frekuensi Doppler dengan kecepatan dan frekuensi carrier yang berbeda-beda. Dengan kecepatan target konstan, frekuensi Doppler akan mempunyai nilai yang sangat kecil apabila dibandingkan dengan frekuensi carrier, sehingga dibutuhkan pemancaran sinyal dengan frekuensi carrier yang stabil.
4.4. Hubungan Antara Perubahan Kecepatan Target Terhadap Frekuensi Doppler dan Sudut yang Dibentuk Pergerakan Target Dengan Radar
antara 90º < θ ≤ 180º, nilai negatif pada frekuensi Doppler untuk sudut yang dibentuk antara 0º ≤ θ < 90º, dan nilai nol pada frekuensi Doppler untuk sudut yang dibentuk adalah 90º.
01020 30 40 50 60 70 80 90 100 110 120 130 140 150 160170 180
0 50 100 150 200 250 300
‐2000 ‐1500 ‐1000 ‐500 0 500 1000 1500 2000
Ke
ce
p
a
ta
n
(m
/
s)
Frekuensi Doppler (Hz)
Gambar 4.16. Grafik hubungan antara perubahan kecepatan target terhadap frekuensi doppler dan sudut yang dibentuk pergerakan target dengan radar
dengan frekuensi Doppler. Target yang mendekati sumber, frekuensi yang diterima akan menjadi lebih besar daripada frekuensi yang dipancarkan. Sedangkan target yang menjauhi sumber, frekuensi yang diterima akan menjadi lebih kecil daripada frekuensi yang dipancarkan.
5.1. Kesimpulan
Berdasarkan perancangan dan pengamatan yang telah dilakukan, diperoleh beberapa kesimpulan sebagai berikut:
1. Semakin besar frekuensi carrier yang dipancarkan dan semakin besar kecepatan target, semakin besar pula frekuensi Doppler yang diterima oleh radar.
2. Karena frekuensi Doppler sangat kecil apabila dibandingkan dengan frekuensi carrier, maka saat pemancaran sinyal, frekuensi carrier harus stabil, sehingga diperoleh frekuensi Doppler yang stabil pula.
3. Target yang mendekati sumber, frekuensi yang diterima akan menjadi lebih besar daripada frekuensi yang dipancarkan. Sedangkan target yang menjauhi sumber, frekuensi yang diterima akan menjadi lebih kecil daripada frekuensi yang dipancarkan.
5.2. Saran
Untuk pengembangan program simulasi pemrosesan kecepatan dengan pergeseran Doppler selanjutnya, penulis menyarankan untuk :
1. Jumlah target lebih dari satu.
2. Sudut pandang radar sebesar 360º.
3. Untuk pendeteksian pesawat, pengembang diharapkan dapat mendeteksi tinggi dari pesawat tersebut.
4. Apabila terdapat clutter atau pantulan sinyal yang tidak diinginkan, pengembang dapat menghilangkan clutter tersebut.
Yogyakarta, Jilid 2, 1987.
[2] Alan V. Oppenmheim. Applications of Digital Signal Processing. Prentice-Hall, New Jersey, 1978.
[3] Rabiner, Lawrence R. and Bernard Gold. Theory and Aplication of Digital Signal Processing. Prentice-Hall of India, New Delhi, 1997
[4] What is Radar and How Does it Work?. http://www.ieee-virtual-museum.org
[5] DSP Applications in Radar. http://www.ee.iitb.ac.in
[6] Radar. http://en.wikipedia.org
[7] Microwave Devices & Radar. http://www.dcjenn.com
[8] http://www.cambridge.org
[9] Lab Exercise : Doppler Radar
[10] Advanced Radar Systems. http://www.fas.org
[11] Ifeachor, Emmanuel C. and Barrie W. Jervis. Digital Signal Processing, a pratical approach. Prentice-Hall, New Jersey, 2th edition, 2001.
[12] http://www.cmlab.csie.ntu.edu.tw
[13] http://www.local.wasp.uwa.edu.au
[14] Sanjit K. Mitra. Digital Signal Processing A Computer-Based Approach.
McGraw-Hill, New York, 2th edition, 2001.
[15] Sugiharto, Aris. Pemrograman GUI dengan MATLAB. Penerbit Andi,
A
the existing singleton*. handle to
%
% KECEPATAN('CALLBACK',hObject,eventData,handles,...) calls the local function named CALLBACK zin KECEPATAN.M with the given input arguments.
%
% KECEPATAN('Property','Value',...) creates a new KECEPATAN or raises the existing singleton*. Starting from the left, property value pairs are to the GUI before
Kecepatan_OpeningFunction gets called. An unrecognized property name or invalid value makes property application stop. All inputs are passed to Kecepatan_OpeningFcn via varargin. %
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help Kecepatan
% Last Modified by GUIDE v2.5 06-Aug-2007 01:52:01
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @Kecepatan_OpeningFcn, ...
'gui_OutputFcn', @Kecepatan_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before Kecepatan is made visible.
function Kecepatan_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn. % hObject handle to figure
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes Kecepatan wait for user response (see UIRESUME) % uiwait(handles.figure1);
set(handles.Target,'enable','off'); set(handles.edit9,'enable','off');
set(handles.file_simpan,'enable','off');
set(handles.file_cetak,'enable','off');
% --- Outputs from this function are returned to the command line.
function varargout = Kecepatan_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT); % hObject handle to figure
% eventdata reserved - to be defined zin a future version of MATLAB
% handles structure with handles and user data (see GUIDATA) % Get default command line output from handles structure
varargout{1} = handles.output;
% --- Executes on selection change zin BandFrek.
function BandFrek_Callback(hObject, eventdata, handles)
% hObject handle to BandFrek (see GCBO)
% eventdata reserved - to be defined zin a future
![Gambar 2.5. Diagram blok dari subsistem detection processor [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1602096.2058967/32.595.123.503.360.580/gambar-diagram-blok-dari-subsistem-detection-processor.webp)
![Gambar 2.7. Sirkuit pembatalan pada MTI processor [10]](https://thumb-ap.123doks.com/thumbv2/123dok/1602096.2058967/38.595.160.465.244.361/gambar-sirkuit-pembatalan-pada-mti-processor.webp)
![Gambar 2.8. FFT butterfly untuk FFT 8-point [11]](https://thumb-ap.123doks.com/thumbv2/123dok/1602096.2058967/43.595.117.524.109.366/gambar-fft-butterfly-untuk-fft-point.webp)