TlJGAS AKHI R
KS
1
701
..,
Mill!~ PEIIIOUSUII·.a.a,.I
'NSTITUT Tf!INOlOO. -,~,..Utu" - NOPEMJW:II f--~---·
ANALISA DAN PERANCANCAN ALAT
SISTEM BONGKAR M
U
AT PADA KAPAL BAYU PRIMA
R. J.J['
!n.
g{'}
M11 11
C?-,
-PI::Ri>Uliil'AKAAN I 1'
s
Oleb :
Trt. Terima 1
i_t-8
-zvvy
-·Teri m ..
na
~·
11
No. A~renda Prp.j '??!NYMISBAKHUL MUNIR
4200 109 515
JURUSAN TEKNIK SISTEM PERKAPALAN
FAKULTASTEKNOLOGIKELAUTAN
INSTITUT
TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2004
LEMBAR PENGESAHAN
ANALISA DAN PERANCANGAN ALAT
SISTEM BONGKAR MUAT PADA KAPAL BAYU PRIMA
TUGASAKHIR
Diajubn
Ouna& Maua:~ubiPcrsy11'11faD
Memenuhi OehuSerj111a Telmik
Pada
JurtiSIIl Tebit Siltem Perlcapalan
Falcultu Telmoloai Kelautan
Institut Tebololi Sepulub Nopember
SUrabaya
Surabaya,
Agustus
2004Mengetahui!Malyetujui
JURUSAN TEKNIK SISTEM PERKAPALAN
FAKULTAS TEKNOLOCI KELAUTAN
lNSTITUT
TEKNOLOCI SEPULUH NO PEMBER
SURABAYA
F·\k:li.T.\ S TEKI'IOLOGI KELAUTAN
JLIRl
1S
AN
TEKNIK S
ISTE
M
PERKAPALAN
f...\ \!Pl.\ II S Kl'f>IITIII SUKOLILO SURABAYA 60111TfLP <Q04754, ~'l<l42~ I ~SPES 1102 FAX 5994754
SURAT KEPUTUSAN PENGERJAA
N
TUGAS AKHIR
KS
1701
S.:baga• salah satu syarat umuk mendapatkan gelar Sarjana Teknik Sistem Perkapalan Fakullas Teknolog~ Kelautan ITS, maka perlu diterbitkan Surat Keputusan Pengerjaan
Tugas Al..lnr yang membenkan mgas kcpada mahasisv.·a tersebut di bawah untuk mengeljakan Tugas Akhir sesua1 Judul dan linglrup bahasan yang ditentukan.
Nama Mahasiswa
Nrp.
Dosen Pembimbing
T anggal Diberikan Tugas
Tanggal Diselesatkan Tugas Judul Tugas Akhir
Oktobcr 2003
Misbakhul Mumr
.4200109515
· I. Jr. SoemartOJO W A, M.sc
2. Jr. Jrfan
s. MT
: Analisa dan Perancangan Alat Sistem Bongkar Muat Pada
Kapal Bayu Prima
Teknik Sistcm Pcrkapalan
tf.f;,:J<~.RMan ITS
Surabaya, Oktober 200
<
Yang menerima luga.., Mahasi~"a
,
rp
Misbakhul M_U!J.!L NRP 4200 109515r
o,~nbimbing
I. i
,
I ) [ ! l l1L-tr
.
Soemanoto W A. M.scTUGAS AKH!R
I
N
!
lELAif DIUJlKAN
PADA PRESENT AS!
AKHIR
(P3)
TUGAS AKH!R SEMESTER GENAP TAI-IUN AJARAN 2003/2004
MF.NGETAHUI DOSEN PENGUJI P3
DOSEN
PENGU.If
f
lrH.
SOEMARTOJO
W
.
A
1
30 355 300
DOSEN
PE!\'GUJI
Ill
DR
.
fr.AA
.
MAS
M.En
DOSEN PENGUJI
II--
----~
vr
),J
lr.H. ALIM WIDODO
.
M
.sc
131
474 402
lr. SURJO WIDODO
ADJL
M.sc
13
f879 390
\ll"TR \CI
I ••ad:n:: uni<>.1Juw '"1<'111 on ~.:tm-comam.:r shtp marorit\ use carl!O h0<1k \\1lh
manual ~nr.:aJ.:r II 1m oh.: lidd .:mplo~.:c on loadmg process that mal..e acctdent happened.
Otomauc ~rr,·ad.:r '' ~tcm _ru~t tn\ oh c operator can !!".: soluuon for this problem.
\ll>dll.l<:all<lll ,·an mal...: a quauon abaut contamer mo,ed condnion for lifiing proccs!>
loading rond111011 must '" ing lor choose right direction such as empty loading cond11ion
""'''"''•'r mo'.: \\hlthout load1ng lliil.
Load must impact on planning 111 full load condition until planned for that condirion,
problem is th.: condition Wlthour load spreader still as the fuction as planning. This
problem can b.: ~ol'.: because thnr load li·om spreader planning and load from string too and
1\BSTRAK
S1st~m bong~:lr muat pad:~ ~apal s~m1 countainer kebanyakan menggunakan cargo <kngan tamb:~han ~prcadcr manual yang banyak melibatkan tenaga kerja dilapangan
prose~ pengi~atan dan pel.:pa~an pada container sehingga kecelakaan pada saat bong~ar
~~nng uda~ dapat dihmdan S1sh::m spreader semi otomatis yang hanya mclibat~an
tperat<>r dapat mcrnbcn~an ~olus1 untuk perrnasalahan di atas.
Modill~a~i dapat mo::n1mbulkan pertanyaan tentang kondisi gerakan container pada
proses pengangkatan dan kondisi muatan harus d•putar untuk menentukan arah yang
hal im discbabkan tign kondis1 yangn sangat berbeda yaitu kondisi muatan kosong
spc:ad•cr bergerak tanpa adan~a muatan yang harus diangkat), kondisi yang kedua muatan
•'"·""'" dan kondisi yang t.:rnkhtr adalah saat muatan penuh.
Muatan yang harus dtbcbankan pada rancangan dalam kondisi full load sehingga
ilakukan perancangan untuk kond1s1 tersebut, permasalahannya yang timbul apakah pada
~ond"' t:lnpa !...:han -pr.:ad.:r ma<oh llcrfungsi scsuai dengan yang direncanakan.
"'""'m"'
101 terata'' ~ar,·na aJJn'a l'<>bot dan rancangan spreader dan juga bobot dari tali llu send1ri ~arena u~uran dan pan_1ang tah yang digunakan maka pada kondisi muatan os<mg maupun penuh ~rr.:Jd.:r tctap lx·rtung" 'c$ua1 Jt'ngan rancangan yang diharapkanh: \I \ 1'1 '\C \ '\ 1".\R
.\lhamduhllahmt•hl>ll \l.1mm. d.:ngan •r•n-''·' a~htrn~a kami dapal m.:n~u,un J.m
... " \ L IS.\ I>·" PER:\'\'( \\'GA\' ALAT
SISTI;.,\ I UO\GK\1~ \II .\ T P.-\ OA h:APAL BA \T PRIMA"
S.:bagJI ~alah satu p,:r,~aralan k.:lulu~an d1 Jurusan r.:knik Sistem P.:rkapalan 1-IK makna dari r><=n~ u~unan lugas Akhir adalah untuk membekaiJ dan memp<!rsiapakan Sa~rana T .:knik dalam m.:n.ralankan profesim a di tengah-tcngah rnas~ arak31 k-beniUk analisa dan pcnycksa•an masalah vang menjadt kendala utama di lapangan iharapkan mampu unwk d•anl•s•pasi dengan dis1plin ilmu yang telah diperoleh
!-;ami ~angal mcngharap bcrupa saran a1au masukan terhadap karya tulis im s.:hingga
mcn.rad1 bahan untuk mcnycmpurnakan dan kelengkapan materinya.
Dalam kescmpatan mi kami 1ngin m.:n~ ampa1kan ucapan tcnma kas1h scrta yang lulu~ kepada
lbu dan Ayah tercm1a scna sc:luruh keluargaku \ang ~nanuaasa m.:mh.:nk.tn
J,,
.1 J.m dukungan monl maupun ma1crillBapak lr Socman~ro. W A Selaku doscn pcmhimhing u1ama
Bapak lr lrfan S MT Selaku dosen pembimbmg pendamping.
Seluruh kar:a"an PI SI'IL, alas kon~ultas1n~a dt lapangan scrta da1a yan!:!
c.J•I"'"'·"'
Rckan-rckanleknik $t$1Cm pcrkapalan scmua alas dukungannva.
Dan scmua p1hak ~ ang tak dapa1 kami sebu1kan sa Ill per saltl, tctap1 sanga1 hcrartt JJiam
penj e;;J'!sai:;n Tuga, Akh:r 111i.
.\~lliiii\J ~~:111 rn.·n;;h.rr.tp~:tn >~mog~ m~tt:n \ang J"aJrkan Jalam tugas akhrr inr
m.:ml'<'n~an m.mlaat ha~r 'nng rnt:rnbutuhkan
Surabaya. Agustus 200..J
1>.\1-T.\R 1~1 KATA PENGAt\'Ti\R Di\1-TAR CiAMAAR B I PF.NI)AIIl'Ll"A:\ .... ... . I. I. Latar Bdakang ... .. I 1.2. TUJU311 . .. ... "" ... ...I ? 1.3. Manfaat... .... ... .
.
..
....
....
..
....
.
....
..
...
..
..
...
...
..
...
..
..
..
....
..
....
..
...
..
...
...
..
.
···
···
·
-I -1 Bmasan Masalah ... .. . ... ... ... ... ... .. ... . .... .. ... 2 I 5. Mc:todologi... .. ... II DASAR TEORI .. .. ... .. 2.1. Karakteristik Umum Mesrn Pengangkat (Crane). ... .. ... .. 2.2. Sekilas Tcntang Crane Pada Kapal Bayu Prima... ... .... .. .. 1 3 ' ·'.
.
.
.
".
~ 2.2.1. Tali Baja ... ... 42.2.2 Mctodc: Des1gn Dari SiMcm Pengcrcman... . 10
2 2 3 S1stcm Puli.. ... ... .. .. ... ... ... 15
2 2 -1 Pcmthhan P.:nggerak ( untul.. mesm utama dan winch)... ... .. 18
B Ill PfRANCAI\GAI\' DA~ PERHITUNGAN.
:w
3.1. Pcrhitungan Tali Baja Dan Drum (puh) ... ... . .... ~0.~ I 2 1\:rhttungan I alt "-unJ"' lkl,~n ~.:p~ruh
.~ I ; l'.:rhtlungan 'J alt KnnJ,,, U.:h.tn Jl,·nuh
; ~ 1\·rhllungan Orum
3.3 l'.:rhttungan R.:m
~ -1 P.:rh11ungan Roller Bcanng Pada Sprcad.:r
21
B IV ANALISA DA~ PF.RF.I\'Ct\'.JAAN SISTF.M 130NGKAR MUAT PADA KAPAL
Yl.J PRIMA .31
4.1. Gambaran Umum Sist.:rn Bongkar Muat Pada Kapal Bayu Prima ... 31
-1.1 I. Penanganan Muatan .. .. 31
4.2. Analisa llasil Moditikasi ... ... ... 34
4.2.1 Ststem Spreader ... .... ... ... 34
4.::!.2. Pengikatan Muatan ... ... .
4.2.3. Roller B!!aring ... ... .
-1.3 Analtsa Sistem Tali ...
-I..J Pcnanganan Muatan
V KESIMPULAN Pustaka ran 38 ..3<) . ... -II
DAn .\R {;,\ \IR.\R
Gam bar 2.2 Gambar race! dengan posisi gear di luar 12
Gambar 2.3. Gam bar distribusi tekanan sa wan dan ga"a peda pengereman ' 13
Gambar 2.4. Gambar tali yang lepas dari pul1 !clap dan pul1 bergerak ... 15
Gam bar sistem puli majemuk ... . 17
.... 29 '1 ' '
..,_
... 34,,
.
_,_4.5 Gambar hasil modifil..as1 ... .... . ...
36
38
.. 40
... 41 bar 4. 9. Gam bar spreader 2 ukuran ... ... ... .. ... . ... 42
Tabel Harga fa!-tor m
Tabc2 llarga Jbk tor C Tabe3 Harga faktor
c,
... ..
Tabe-lllnrgn faktor C: ... ..TabeS llarga takror C: ... ..
Tabe6 llarga takror C: ... ..
IHFI.\It f.\IH.I.
Tabe7 llarga a.L~ .... ... ... ... .... .... .... ... ... .... . ... ..
(, 7 . 7 8 8 .. 9
1.1 LA TAR BELAKANG
BABI
PENDAB'ULUA~
Banyaknya perusahaan yang bergerak dalam bidang jasa pengiriman barang,
menuntut semakin bagusnya kinerja dari perusahaan-perusahaan yang terlibat. Sehingga
semua perusahaan yang ada bersaing dalam hal pelayanan yang semakin cepat dan aman.
Untuk mencapai hal tersebut salah satu cara dapat ditempuh dengan mengoptimalkan kerJa
dari pada alat bongkar muat pada perusahaan yang menggunakan kapal semi coumainer
seperti halnya PT. SPIL Surabaya.
Pada tugas akhir ini dilakukan analisa pada sistem yang sudah ada dan akan
dilakukan modifikasi pada alat tersebut. Hasil dari modifikasi diharapkan dapat
menguntungkan secara teknis maupun ekonomis.
1.2 TUJlJAN
Tujuan penulisan Tugas Akhir ini adalah :
l. Mengetahui karakteristik sistem bongkar muat yang telah ada dan kekurangannya.
1.3. MA:"FAA T
Adapun manfaat yang akan diperoleh dari penulisan rugas ak.IJir im an tara lam·
I. Sebagai bahan masukan bagi PT. SPll.. Surabaya agar dapat lebih memngkat;;an
pelayanan terhadap pengguna jasanya.
2. Setelah diklakukan modifikasi pada peralatan yang ada, diharapkan akan dapat membawa
keuntungan bagi perusahaan misalnya mempercepat proses bongkar muat dan dapat
mengurangi resiko kecelakaan para pekerja.
1.4 BAT ASA~ MASALAH
Adapun batasan pada penulisan Tugas Akhir ini adalah : I. Tidak dilakukan analisa pada kekuatan material yang ada.
2. Hanya menganalisa sistem loading dan unloading.
1.5 METODOLOGI
Metodologi merupakan suaru kerangka dasar yang digunakan sebagai acuan unruk
menyelesaikan permasalahan yang akan dipecahkan atau dianalisa. Dalam metode penulisan Tugas Akhir ini adalah:
I. Pengumpulan data mengenai sis tern bongkar muat pada kapal Bayu Prima. 2. Analisa permasalahan.
3. Perencanaan modifikasi yang akan dilakukan
-1 Anahsa dan hasil perancangan. 5. Kesimpulan
BABII
DASARTEORI
Ko\RAKTERISTO< UMUM MESDI PENGANGK.o\T (CR-\l\"E)
Crane adalah gabungan mekanisme pengangkat secara terpisah dengan raogka untuk
atau sekaligus mengangkat dan memindahkan muatao yang dapat digantungkan bebas atau diikatkan pada crane. Jenis-jenis crane dapat dikelompokkan menjadi :
Kelompok crane putar yang diam di tempat, umumnya merupakan crane tetap deogan
tiang miring yang berputar pada sumbu venikal.
Kelompok crane yang bergerak pada rei, umumnya terdiri atas crane Cantilever dan
monorel yang bergerak lurus pada suatu jalur khusus.
Kelompok crane tanpa lintasan terutama terdiri dari crane tiang yang dipasang pada truk
atau jenis mobil yang lain.
Kelompok crane yang ditempatkan pada lokomotif atau kendaraan beroda belakang,
termasuk pula crane tiang yang lebih kuat yang bergerak pada jalur rei, jalan tanah dan di
dalam gudang
Kelompok crane jenis jembatan terdiri atas crane yang berjalan pada jembatan rangka
atau pada jalur rei yang dibentangkan pada dinding bangunan atau permukaan tao!lh.
2.2. SEKD-AS TENTANG CRA~E PADA K.u'AL BA Yli PRL\IA
Kapal Bayu Prima adalah salah satu kapal semicontainer yang beroperas1 antara Jawa
dan Kalimantan, penggunaan crane pad.a kapal tersebut sangatlah penting untuk m<!nunpn~
operasi bongkar muat, terutama di \vilayah Kalimantan karena bantuan dari crane darat
J.:urang memadahi. Bagaian-bagaian crane yang digunakan pada kapal Ba~11 Prima antara
lain:
I. Tali baja.
2. Metode design dari sistem pengeriman.
3. Sistem puli.
4. Pemilihan penggerak (untuk mesin utama dan winch)
2.2.1. Tali Baja
Berawal dari kenyataan bahwa kerusakan tali diakibatkan dari kelelahan bahan dan
setiap tali dapat mengalami lengkungan dalam jumlah tertentu. Dalam tugas akhir ini
perhitungan daya tahan (kel..-uatan batas kelelahan) tali kawat baja menggunakan metode
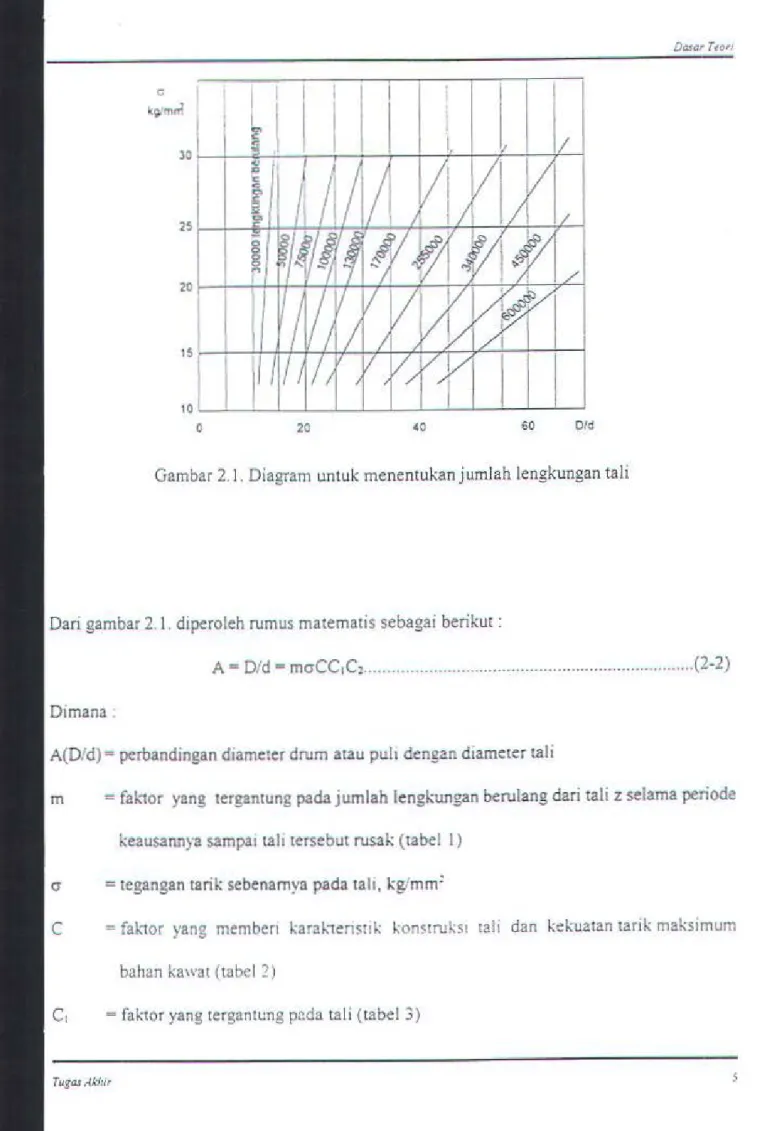
Prof. Zhitkov. Pad.a tahap penama karakteristik umur tali dil-.:umpulkan d.ari semua penguJian
dalam bentuk grafik yang menghasilkan hubungan :
z • f,(cr) dan z
= [,
(D/d) ... (2-1)0aJG' Tt0f'l
"
I
I
/I
<glmrrl I 3oI
~ I,"
•
I
I
25 20I
151 10 0 20 40 60 OldGambar 2.1. Diagram untuk menentukan jumlah lengkungan tali
Dari gambar 2.1. diperoleh rumus matematis sebagai berikut:
A • Did • mcrCC1C2 ... (2-2)
Dimana.
A(D/d) = perbandingan diameter drum atau puh dengan d1ameter tali
= fal..1or yang tergantung pada jumlah lengkungan berulang dari tali z selama periode keausaMya sam pat tah tersebut rusak (tabel I)
= tegangan tarik sebenamya pada tali. kg/mm'
=
fal..1or yang memben karal..1ensuk kon~truks1 tali dan kekuatan tarik maksimumbahan kawat (tabel 2)
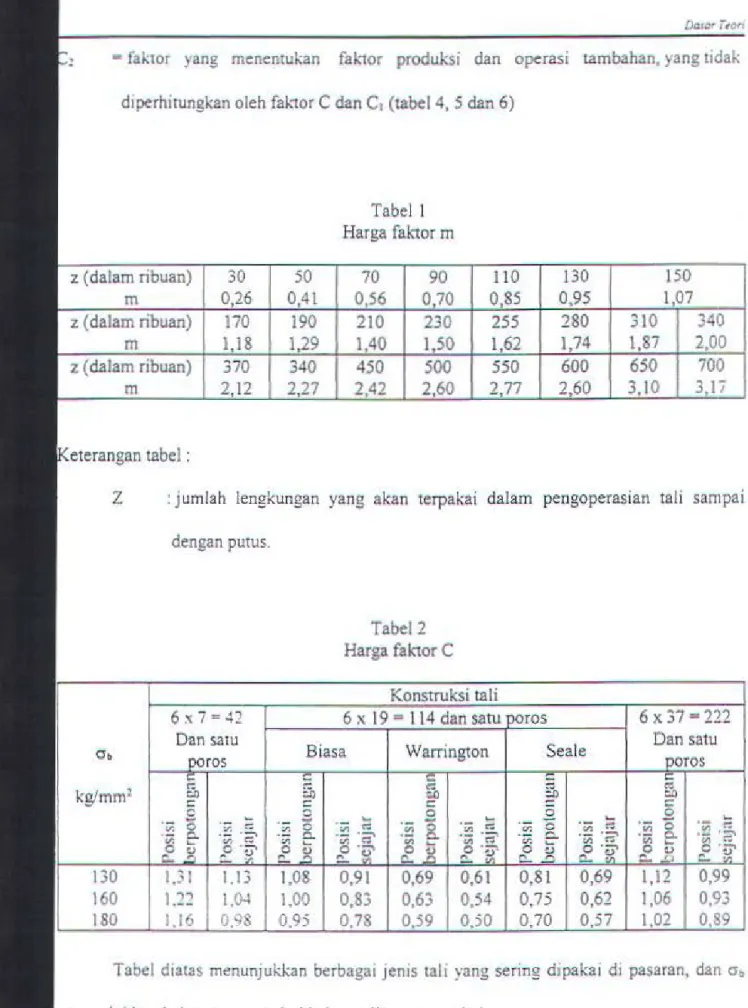
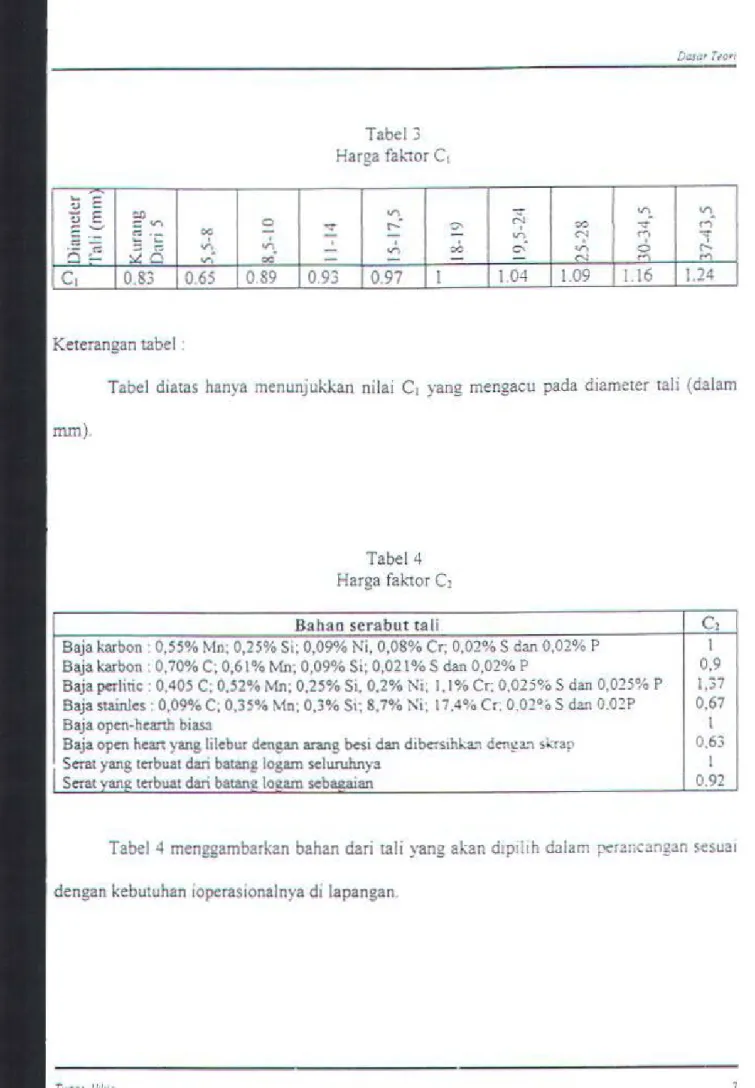
• faktor yang menentukan fal..,or produksi dan operas1 tambahan, yang udak
d1perhitungkan oleh fal..,or C dan C1 (tabel 4, 5 dan 6)
Tabel I Harga faktor m z ( dalam ribuan) 30 50 70 I 10 130 150 m I z ( dalam ribuan) 210 255 310 340 m
Z : jumlah lengkungan yang akan terpakai dalam pengoperasian tali sampai
130 160 180 dengan putus. 6 X 7 • 42 Dan satu Tabel2 Harga faktor C X 37 • 222 Dan satu
Tabel diatas menunjukkan berbaga1 jenis tall yang sering dipakai di pasaran. dan cr.
menunjukkan kekuatan putus dari bahan tali yang terpakai.
Tabel3 Harga fa h.-tor C, :l)
.,.,
,::,"'
"'.."'"'
c..,.
,..: '::'""
..,.
f"'' c: ·- co-
"'
• <';' "';' "f=
=
.
"'-
• •""
~6""'
""'
'"'
"'
0 1"-V\ co.
...
M 0.83 0.65 0.89 0.93 0.97 1.0-4 1.09 1.16 1.24 Keterangan tabel :Tabel dtatas hanya menunjukkan nilai C1 yang mengacu pada diameter tali (dalam
Tabel4 Harga fal..-tor C1
Bahan scrabut tali C1
Baja karbon: 0.55% Mn; 0,25% Si; 0.09% Ni, 0,08% Cr: 0,02% S dan 0,02% P I
Baja karbon: 0,70% C; 0,61% Mn; 0,09% Si; 0,021% S dan 0,02% P 0,9
Baja perliric: 0,405 C; 0,52% Mn; 0,25% Si, 0,2% Ni; 1.1% Cr: 0,025% S dan 0,025% P 1.37
Baja stainles: 0,09% C. 0,35% Mn: 0,3% Si: 8,7% Ni; 17.4% Cr: 0,02°o S dan 0.02P 0.67
Baja opcn-heanh biasa I
Baja open hean yang lilebur dengan arang besi dan dtbersahka., denp .. , skrap 0.63
Serat yang terbuat dari batang logarn seluruhnya I
Serat an11.terbuat dari batanl!.loum sebaQ,aian 0.92
Tabel 4 menggambarkan bahan dari tali yang akan dapahh dalam p.:r~ncangan sesuaa
Penggambaran
Proses perlakuan pemberian panas
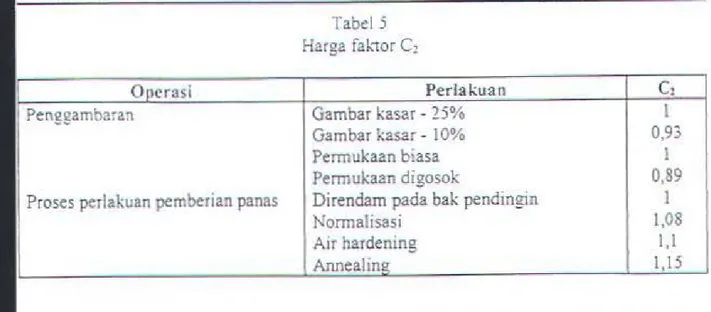
Tabel 5 Harga fak'tor C1 Gambar kasar -25% Gambar kasar- 10% Permukaan biasa Permukaan digosok
Direndam pada bak pendingin t-:ormalisasi AIT hardening DCJar Tto,., I 0,93 I 0,89 I 1,08 1,1
Pada tabel 5 harga fak1or C: mengacu pada perlakuan saat operasi dan juga perlakuan saat proses pembuatan.
Bahan puli
Jari-jari puli
Keadaan lengkungan puh Sudut kontak tali pada puh
Sudut defleksi tali relauf terhadap
bidang normal as puli atau dntm (sudut) Temperatur sekitar Tabel6 Harga fak1or C1 Besi tuang Dural urn in Tenun berlapis 0,52 d tali 0,75 d tali R
=-Alur \' -lO Satu lengkungan Banyak lengkungan 180 90 ~5oo
1°30 ·' 5 -20'C O''C 0,92 0,80 I 1,16 1,27 1,26 I 1,4 I 1,14 1,27 I 1,09 1,16 1,22 I 0,9 0 8dengan rum us sepeni d1 atas. D1 dalam mekam~me pengangkatan "ang berbeda satu tali yang sejems dapat mengalam1 SeJumlah lengkungan tene:llu ~·ang hc:rbeca tergantung pada jumlah
puli penuntun yang dilewau tali dan unggi angkatan muatan (yang udak selalu sama) sena
perbandingan antara beban kerja penuh rata-rata
Untuk mendapatkan data yang lebih tepat tentang jumlah siklus ketJa, jumlah dan beban tali, perusahaan dan lokasi konsrruksi tenentu telah mengadakan
Kondtsi pengoperas1an mesm pengangkat Digerakkan Peralata n nngan Peralata n medium Peralata n bcrat dan 8 8 \6
25
25
25 16 Tabel 7 Harga a, z2 dan a 400 Mode suspensi be: ban Suspensi Suspensi 40 1,000 dengan satu 136 3,400 2 30 320 9,600 2x5 9 07 2 0.5 5 02Dan tat>el d1 ata~ -::"~:! .: ~ ctahu: ~ondtS! op.:ras1 me;;anism.: pengangkat, dan telah umur talt, k11a dapat menentukan JUmlah kngl;ungan yang diperbolehkan
z,
ngan rumus
. . . ... (2-3)
: umur tali dalam bulan
: jumlah siklus rata-rata perbulan
: jumlah lengk-ungan berulang per siklus kerja (mengangkat dan menurunkan) pada tinggi pengangkatan penuh dan lengkungan satu sisi
: faktor perubahan daya tahan tali akibat mengangkut muatan lebih rendah dari tinggi total dan lebih ringan dari muatan penuh
2.2.2. Metode Design Dari Sistem Pengereman
Pada mesin pengangkat rem digunakan untuk menahan muatan agar diam ataupun
untuk mengatur kecepatan penurunan muatan. Rem digunakan juga umuk menyerap inersia
massa yang bergerak (truck, crane, muatan. dan lam s.:bagamya) Terga:uung pada
kegunaaMya rem dapat diklasifikasikan sebagai jems penahan. jenis penurun kecepatan atau
gabungan dari keduanya
Rem juga dapat d1bedakan menjadi rem otomatis dan rem yang dioperasikan secara manual. Jenis rem yang termasuk manual ialah rem sepatu atau blok. rem pt!J, r.:m ker.Jcut,
rem cakram dan rem racer sena rem dengan gagang pengaman. Pada bpal BJ' u Pnm:l rm
dugunakan rem sepatu luar.
..
,.
Rem sebagai alat penahan aiau dtsebut peralatan racettmenahan ag:!r mL~•~· .:.~··
Jenis peralatan ini terdiri atas roda racet dan sebuah pengunct, gigi racet dapat dtlcta:.kan
pada bagaian sisi luar aiau bagaian dalam stst aiaupun roda racet Gtgt tersebut Cl1bu:u
sedemikian rupa sehingga racet dapat bergerak bebas ketikan beban diangkat. Penahan
terbaik akan diperoleh pada titik kontak antara garis singgung yang melewati tiuk putar
pengunci dan diameter luar roda racet. Dalam hal ini tekanan pada pengunct diarahkan
sepanjang gaya keliling roda racet.
Menurut tujuannya roda racet dapat didesain dengan jumlah gigi yang berbeda-beda ·
z : 6-8 untuk dongkrak batang pinion.
z : 12-20 umuk penahan racet yang bebas. z : 16-25 atau lebih untuk rem jenis racet.
Panjang gigi (Iebar daerah pengunci) dipilih dengan mempenahankan tekanan saruan
linier
b
=
Pip ... . .. (2-1)Dimana:
P: gaya keliling (biasanya satuan diambil 50-\00 Kg/em)
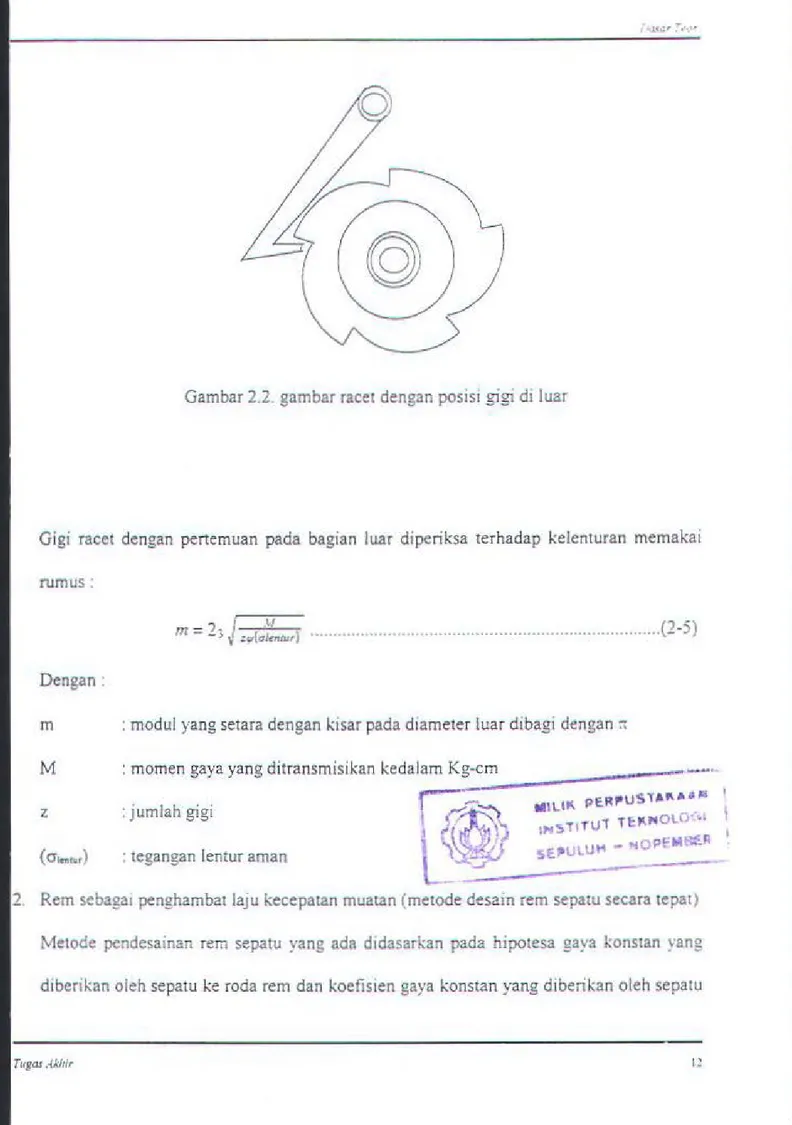
Gambar 2.2. gambar racet dengan posist gigi di luar
Gigi racet dengan penemuan pada bagian luar diperiksa terhadap kelenturan memakai rumus :
m = 2;
J
:.,1~;~.,1
... (2-5)Dengan :
m : modul yang setara dengan kisar pada diameter luar dibagi dengan :1
M : momen gaya yang ditransmisikan kedalam Kg-c:m:_ _ _ __ _ _ __ _ --··
~ MlLll\ PER!'US'T.t.l\.,._., I
~
II'<!>'T!TU'T lt:.I\"OLO'''l~~
SE
',t
ULUt<~QPFMs:>R
z
: j umlah gigi(a ... ,) : tegangan lentur aman
Rem sebagat penghambat laju kecepatan muatan (metode desain rem sepatu secara tepat)
Metode pendesainan rem sepatu yang ada dtdasarkan pada hipotesa gaya konstan yang
dtberikan oleh sepatu ke roda rem dan koefisien gaya konstan yang diberikan oleh sepatu
ke roda rem dan koefisien gaya gesek konstan. :vletode 101 d1dapat dan rersamaan
kesetimbangan statik pada sistem ruas rem. Diasumsikan bahwa gaya rem yang diberikan
pada roda secara statik pada sistem tuas rem. D1asumsikan bahwa gaya rem yang
d.iberikan pada roda secara statik dan tidak dibedakan antara desain sepatu rem dengan sepatu yang d.ipasang kaku pada tuas rem dengan sepatu yang terpasang pada titik putar.
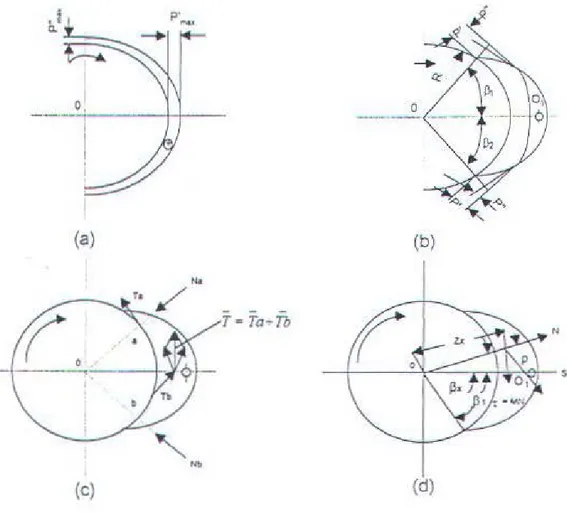
Semua asumsi tersebut lebih jelasnya dapat dilihat dari distribusi gaya pada gam bar 2.3
(a) (b)
T ~ Ta-Tb
(c) (d)
Gam bar 2.3. gam bar distribusi tekanan saruan dan gaya pada pengereman
Gambar (a) dan (b) : menunjukkan geometri gerakan tuas terhadap sepatu dan gerakan
.
_,•.
..
,.tekanan terbesar pada bagian sepatu yang rnenyon;rsong putaran roda cJn :,•,Jn~" minimum pada bagian sepatu meninggalkan roda
Gambar (c) : titik kerja resultan gaya gesek T dan ga~a normall\ selalu terletal. dt luar
keliling roda tidak dipengaruhi oleh hukum dtstnbust tekanan satuan sepanjang sepatu
dan letak gaya gesek pada permukaan dalam atau luar roda rem. Pengambilan uuk a dan
b pada permukaan roda rem akan terlihat bahwa gaya gesek T, da Tb yang dibenkan pada
kedua titik ini dan T, • J.!N, dan Tb c fl:-.lb. Karena gaya gesek diarahkan pada tangen,
maka resultan gaya-gaya tersebut akan selalu dikenakan pada luar keliling gesekan roda.
Hal tersebut berlaku untuk semua titik singgung antara roda dan sepatu tanpa tergantung
pada semua fak1or laiMya dan apakah sepatu dipasang kaku atau dengan titik putar, oleh karena itu resultan gaya tangensial didapat pada titik paling luar dari roda.
Gam bar (d): arah resultan gaya normal ditentukan oleh sudut (dalam gam bar di atas) tan{Jx
=
.u[
I-7hr
2
;
1
~~
~
~
1
] ... .. ... ... (2-6)Dengan cara seperti ini arah resultan gaya ditentukan tidak hanya oleh desain rem tetapi juga oleh koefisien gesek. Resultan gaya normal dan gaya tangensial akan miring ke arah resultan gaya normal dengan sudut gesek pada arah putaran roda (tanp=!-1) dan melalut
swnbu sepatu. Titik kerja gaya resultan gaya normal dan tangensial berada di luar roda rem dengan jarak Lx dari pusat
Lr
=
001 [ cos{Jx-J
sin/lx) ... (2-7)Sudut ~' selalu bemilai pos11if, yakni sudut yang dibuat terhadap sisi tempat sepatu menuju roda atau sam a juga yang berlawanan dengan arah putaran roda.
.3. Sistem Puli
Suatu sistem puli adalah gabungan beberapa puli bebas dan puli tetap atau puli rantat
sistem puli dengan bati gaya dan bati kecepatan (biasanya alat ini digunakan pada hft
ik atau pnumatik yang membutuhkan kecepatan tinggi). Sistem puli yang berfUDgSI
"'u".~"' perabot pengangkat tidak begitu penting hanya untuk mentransmisikan daya terdapat
derek dan crane.
Q Q Z(Zo)
s
,
s2
(a)s
,
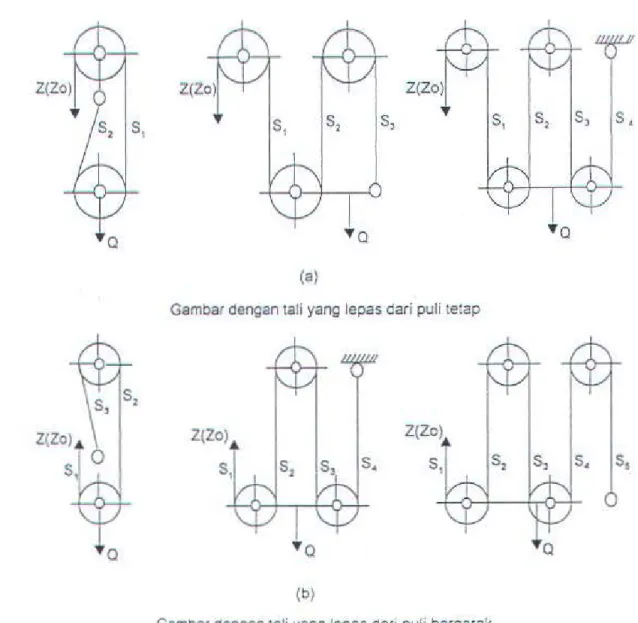
'f'q Z(Zo) 'f'Gambar dengan tali yang lepas dari puli te:ap
Z(Zo) &
s
,
s,
•
a
(b) Z(Zo)s.
s,
s
,
s
,
s, s'
Q S2s,
S,s,
Gambar dengan tali yang lepas dari puli bergerak
gam bar:
Gambar (a) : bila Z adalah jumlah puli maka jumlah bagian pada garis tern pat beban digantung juga sama dengan Z, sehingga perbandingan transmisinya 1 Z Dengan
mengabaikan hambatannya usaha pada bagian tali yang lepas adalah :
Z
o
~
... (2-8) Usaba sebenarnya adalah :z
=
~
=
Q
~t
... (2-9) Dengan T)~ dan£: adalah efisiensi resultan dan fal.."1or hambatan sistem puli resultan. Tarikan total seluruh bag ian dari tali Oeksibel adalah :Q
= S S t+ 2+ J+ S S <+ ... + S n= S !+o+..,-s,s,
+.,-+ s, ... +..-:;;-s
,
... (2-1 0) Sehingga:Q
I •• -I )= S I -;::T
=
...-:! ... . ... (2·11Gambar (b): dengan z buah puli maka jumlah bagian tali di mana beban digantungkan akan menjadi z + I, dengan perbandingan transmisinya :
i = :+ I ...... (2-12) Usaha ideal pada bagian tali yang lepas adalah :
Q
Z
o
=::r ..
...
.
.
....
.
..
...
...
...
...
...
(2- I 2) Usaha yang sebenarnya adalah :Z=
~
... (2-13) Dengan menggunakan persamaan sepeni gambar (a) maka :S
I= ...L..!..:J (l~ t-1 ··· ... ··· ··· (2-1~)
I
'fQ
I
•
o
•'
QKeterangan gambar :
Gambar 2 5. Menunjuk.kan sistem puli majemuk untuk crane, sistem puli dirancang dengan
menggabungkan puli sederhana dengan kedua ujung tali diikat pada drum atau pada beberapa
drum dengan alur hehks kiri dan kanan.
Karena ada beberapa kekurangan pada penggunaan puli tunggal antara lain :
• •
Bagian tali yang terletak pada bidang, hal ini akan menyebabkan beban terayun .
Diameter dan puli yang terlalu besar untuk mengangkat beban yang besar .
• Beban yang diaogkat bergerak pada arah horisontal karena tali yang melingkar pada drum
bergerak sepanjang searah panjang drum terse but.
Kekurangan di atas dapat diatasi dengan perancangan puli majemuk dengan beberapa
keuntungan antara lain :
• •
•
Dapat membawa muatan yang lebih ban yak .
Diameter tali lebih kecil (untuk beban yang sama dengan puli sederhana) sehingga
otomaus harga lebih murah.
Diamter puh dan drum lebih kecil, sehingga dapat mengurangi beban secara keseluruhan .
2 .. 2.-t. Pemiliban Penggerak (untuk mesio utama dan winch)
Berbagai desain penggerak unruk crane biasanya mempertimbangkan tentang berat
muatan dan jarak yang akan ditempuh oleh peralatan. Selama ini di kapal paling banyak
mcnggunakan penggerak motor listrik dengan penimbangan bahwa power di kapal sudah
tcrsed•a untuh. semua peralatannya, juga ada yang menggunakan penggerak hidrolik,
penggerak tersebut mcnggunakan pnnsip sepeni peralatan hidrolik pada umumnya yaitu
tekanannya dihasilkan oleh pompa hoidrolik sesuai dengan beban yang diperhitungkan.
!'~n~;;~r.J~ hH.lroltl.juga 1111:mpumat h.:berapa keunlungan.
Dun.:n'• m••tom\:t rdaufkccil
"-<'\:<'palan 'ang dtharapl.an dapal mudah lcrcapat
"-.:am;man ••rx·ra,tnnalll!bth t<:rJamm
IJ<nur lt"cJri
Dalam hal pem1lthan dt lapangan maka 1ergantung dan Jenis muatan dan penempatan
p.:ngg.:ral. dl!ngan memperhaukan bobot peralaran dan kecepatan serta penunbangan
BAR Ill
PER\:'-'CA:'-'GAI1i DAN PERRITUJiiGAN
I PERHITl'~GAJii TALl BAJADA ' OR .\1 (Pl1LI)
Perhnungan tali ba_1a dtsmt harus mcmpcrtimbangkan kondisi tanpa muatan (beban
separuh muatan (a~umst pcnggunaan container 20ft, dengan bobot maksimum 20
), dan pengoperasian untuk bcban maksimurn (asumsi penggunaan container 40ft, dengan
maksimum 40 ton) Hal ini perlu dipisahkan dengan tujuan mengetahui hubungan berat
dan kondisi kekakuan dari tali yang dtgunakan sebagai penggantung spreader dan
, karena dengan mcmpcrtimbangkan kekakuan tali yang digunakan baik kondisi
ataupun maksimum spreader harus dapat berfungsi sesuai dengan
L L PerhitunJ!an Tali h:ondisi Behan h:osong
Dalam IU!;a' d~h1r 1111 pull J1tk-am dcngan as tetap dan bebas karena hanya berfungsi
pengarah. ~ ang h1,.a d.-.:hut Juga sebaga1 puh pengarah. Desain pertama kapasitas
n mmunum tht:lum dalam kod1~i dibebani). unggi pengangkatan 20 m (H),
tugas b~ra1 ldalam op.:rasinya scring dibamu dengan crane darat), bobot dari
II )o(, • ' i1. I
:1/,·
I JUIIllah h,tgt:tfl t.tlt dtamhtl X
.
.
-.
\ = ...;,;.7,,7-.
-':'-.lumlah lcng~ungan pada tall dan ras10 D.,, d defl!,>an _1umlah lengkungan ~an~;
dm:ncana~an 8 l~ngkungan maka dt r:x:rokh D,.,, d 31 (ketetapan).
Penampang tall. m~nganbtl dcsain taft dcngan JUmlah kawat 122 (i) dt dapat:
Dimana.
s
.I
n~
. tarikan pado wl1 (kg)
: kekuatan put us bahan kawat tali, dalam kg;cm=
: fungsa dari lcngkungan
F :::.- I.JOJ em:
.2. Perhitungan 1 ali Kondisi Be ban Separuh
Desaan dengan kapasuas pcngangkatan 20 ton (Q), tinggt pengangkatan 20 m (II).
tugas berat (dalam opcrasanya sering dibantu dengan cran.: daratl 1-..•l-..•t d.m
n sptdcr dan komponcn lainnya 6 ton <G) maka
!) llll,IJl.l
< i h.:r.or l.••mrnn,·n da~ar (a~um~i I 000 Kg)
' _1uml.oh hJgoan tah. doambol 8
• : 1 •·..tot• •.Jtwr · ' • ''t'l\ }~ S J 5QOA26 Kg
.luonlah kngl-ungan pada tail dan ras1o Dmon•d dengan jumlah lengkungan yang
d1rcncanakan 8 lcngl-ungan makn d1 peroleh D,,,:d = 31 (ketetapan)
Penampang tall. m~nganbil dcsain tali denganjumlah kawat 222 (i) di dapat:
Dimana:
s
...L I_ I I.
' 1 ••• ) -,,,-
~J --liL .. s ,. {lt:O "-v;;;;x.• '· J· wnl.an pada tal1 (kg)
: kekuatan putus bahan l.awat tali. dalam kglcm2
. fungso dan lcngkungan
F ::: • 5.0J I em=
.3. Perhitungan Tali Kondisi Behan Pcnuh
Dcsa1n dcngan 1-apasitas pcngangkatan
.w
tnn tl,lJ unggo pengangkatan 20 m CH). tugas h.:rat (dalam opcra~onya scnng doh~nlu J,·ngan nan.: daratl. bohot dan5p1der dan komponenlainnya 6 ton (G) mal.a .
• ·~'.!" 1 ,!; r .tn. , •''
·'-
, .... ,Dimana
(i lx·rat kllfllJl<Hl~n Ja,.;~r ta~urn;l I 000 "-g1
L JUmlah bag1an tall. d1amb1l 8
'I! "' IJ, ···~Hit II.
·'
=
"'"'
·J~
S 6250 Kg
Jumlah lcngkungan pada tali dan rasio D .... d dengan jumlah lengJ..ungan yang
direncanakan
8
lengkungan maka di perolch D., .... d- 31 (ketetapan}Penampang tali, menganhil dcsain tali denganjumlah kawat 222 (i) di dapat :
, . . 'l'l't - - - " ' . - -1 ... ) - •n- .i 1Ft (I('·
7 f.ll"fffx . . N
Dimana .
s
tarikan pada tali (kg). kekuatan put us bahan kawat tali, dalam kg/em~
,/
;-:=
fungM dan lcngkungan --;-::,.,..::'·..;.' ":.:.'--,.,_._._., =.,.
.1.!{""' f.yl(tt1!11'
Sehingga d1peroleh dtamctcr tall yang duJmkan adalah (d1pilih dengan mengacu pada
Dunana
<'
dr:un.:t.:r (:JIU ~3\\311 I ~ mm •1- I ,,.1 _,· ~~~
(
-
....
..---d :!6 8 tdibulatkan :!7 mm t
Pcrhnungan dism1 m.:mpcrh11ungkan bcsar drum dan puli yang diijinkan unluk sesuai dcngan tali yang telah ditelllukan, material sesuai dengan yang ada d1
Diameter drum dicari dengan rum us:
f) = 23xcl /) = 23x27
D 621
Maka diameter kompensas1 drum (drum~ ang terpaka• 1 D - 0,6 X 621
D - 372,6 (-100 mm)
Jumlah lilitan tah yang dliJmkan:
..
_~..,'"' - lJ·\\'(1 I T
PERIIITl \(;_\\ IU. \I
Pt>rancang:tn d• ''n' rnc:nggunal.an rt'm dengan ~cpatu ganda I kampas ganda).
sepatu rem d<:nJ:!iln 'cpatu \Otng d1pasang kaku pada tuas rem dengan sepatu yang
beban total ((J, ) 48.000 ~g (Q G - G.,) sedangkan kecepatan pengereman
· rencanakan I 0 m menu (' 1. d1dapat Daya motor untuk pengcrcman :
Dimana:
'1 : cllisicnsi mckanis (0,8)
Schingga :
N - 128,3 Hp Kecepatan motor- 570 rpm
Roda rem d1p1hh sesua1 tahd bcnl.ut
I
Roda rem Daya dan motor meDalam Hp pkanadismc pengangkat a n rpmI Diameter (mm) J Lebar (mm) 11- 570 ' 11 - 730
'
11 - 1:160 160 50 9 10 II 200 65 13 15 16 25080
19 21 ~4 320 100 31 35 HI 400 125 5] 5<1 (• 7 500 160 85 I 95 112I
630 200 135j_
156 800 250 220 160Pada kondisi nonnal roda rem dengan diameter 630 mm bisa dipakai untuk motor d.:ngan daya 128,3 Hp. Untuk pelayanan bcrat daya motor berkurang sekitar 20'!-o. tetapt dengan
penggunaaan rem elektnk daya motor bisa dikurangi 20% lagi.maka ukuran roda r.:m
~ang diptlih cukup memadaht.
• Memeriksa nilai p\ :
Momen ga) a pada poros motor adalah :
AI= 71.620'it
\"-71 6?0E.!l
J 'I - • - SJO
M= 16.120, 78Kg-C/11
Koefisien gesek lapisan adalah I'= 0,45 sesuai dengan tabel dibawah ini : Kocfisicn
Temperatur Tekanan
Nama gesek pada yang satuan aman Spesifik
permukaan gravitasi
kcring diizinkan °C Kg/em
2 Rem asbes yang dilap1si 0,45-0,35 350 p:2 ke 6 155 Pm,u=2 ke 6 scrat kuningan
I
CatalanI
I I I '!
!
!
Lapisan rem normalI
I
I
Ukuran Japtsan rem dtdesam b 15 em (gambar 3.1 ), dan I
=
29 em (gambar 3. I) Sehingga tekanan satuannya adalah:Dtmana
I' · ko<!fisicn gese~
q : .:ni~t<:n~t Slstcm tuas rem, yakni perbandingan antara tckanan scbcnamya
yang bekerja pada tuas penghubung rem ditinjau terhadap pu~t s.:patu. untu~ rem dengan mutu tillk putar yang batk dan pelumasan yang memadat 11 - 0.9 sampat 0.95
Kecepatan penperalnya · Maka: P-- .l!.J.. ,,. bl II• 1:!0.7~ p M¥fl.4J~ lS·tl? p
=
I, 307 Kg/em \ 14\"(1(.'\\"57(1 p= p=
J 8, 79m/ del pv= l,307xl8, 79 pv = 24, 56Kg -m/cm~-detMemeriksa umur Japisan rem (tanpa memperhitungkan rem elektrik) Kerja satu operasi rem ialah :
Waktu pengereman berbeda ketika naik dan turun, ketika naik :
Dengan ·
M,.,, : momen aktbat pcmberat sebesar 67 Kg-m (asumsi) maka :
""
w
w
.\!~,
=
257, 93Kg-m :!: J. l,Jd9.5 1" = " .... t •• =-..,.--= 0, 82 det .~ .. :. 0 257.0.82 0 5~85 d lit,.=-~-= .:!=
~,:)
et A= 257, 93x59, 66x0, 5385.x(), 5=
4143, 247Kg-m 4143,247 A= noooo=
0,015/fp-;am tl(i=
2h/6h=
2d 5x29x0, 5 = 435cm2 ..:ti... 435 000 Y = ll.ll=
0,2.t>,OJ5 = 145. '"~"' = 966,67 TitfltJ'f, lldllrGaya kehling pada roda pengarah :
_;,u lx!(:Q 000 I 230k
p = f) = l<<l = . g
2. Diameter pcna berdasarkan fa~1or keausan :
d = 0 1'4
- JP
q
=
0....
1"4\
{12~.~ "'=.,
_,0m; "nl(faktor Iebar g1gi {J ... ~dwmhdsehesur2,5)
3. Kisar gigi:
' 1 l.~ 5 9
1 = u::iTI"
=
~= ,
em4. Lebar pinion adalah :
b = fld = 2, 5 X 2, 8 = 7cm
5. Mcmcriksa kekuatan lentur pena, dengan mengambil l
=
13 em :Fal.1or keamanan untuk pcna yang terbuat dari baja 45 dengan tegangan tank
maksimum 6.000 kg/em
n
= :
~;~=
45 (yang dapat diterima untuk kecepatan rendah)6 Jumlah pcna yang direncanakan:
• - !-.!.!.. - ' !•.><:<., - I '8 44
- - I - S.9 - .) t
Diamb!l JUmlah pena, z • 139
7. D1ameter roda g1g1 yang scbcnarnya adalah
0
Gam bar 3.1. gambar perancangan sistem rem
3.4. PERHil'liNGAN ROLLER BEARING PADA SPREADER
Perancangan controller bcanng sangat bcrpengaruh pada kondisi operasi dari hast!
perancangan. beanng 101 al-an mcnJadl salah satu 11tik tumpu utama spreader selain
pengikatan spreader dengan menggunal.an best cor )ang dirancang sedemikian rupa sehingga berfungsi pula menJadt 1111k tumpu utama spreader Perhttungan ini didasarkan pada beban muatan maksimum pada kondtst operast. llal ini dikarenakan beban terberat te~adi pada saat countcincr beban penuh dan saat a~ulitas cr;tn~ m~ngangkat. Berikut perhitungan roller
beanng yang dtdesain untuk tugas a kim tnt.
BAB IV
.-\\'.\I.ISA DAN PERE~CANAAN SISTEM BOJiiGKAR MUAT
PADA KAPAL UA YU PRIMA
Pada bab ini akan dibahas anahsa sistem kelayakan dengan adanya moditikasi pada
srstem bongkar muat pada kapal Bayu Pnma terutama kondisi keamanan dan rlitas saat bongkar muat dllakukan Tetapr sebelumnya dilakukan anahsa sistem kel)a
· peralatan bongl-ar muat pada kapal Bayu Prima.
t. G
AMUARAN UMUM SISTEM BONGKAR MUAT PADA KAPALBAYU PRIMAKapal Bayu Prima adalah kapal jenis scmrcontainer dengan dilengkapi peralatan
ovrrg~••r muat schingga pada kondisi udal-adanya support peralatan untuk bongkar muat dari
kapalrnr harus dapat mela)anr drnn)a sendiri, karena daerah operasi kapal Bayu Pnma ra Suraha,a-lnan Ja,a Pada kondrsi melakukan bongkar muat di Surabaya fasilitas
nJang p.:ralatann'a dan darat ~udah sangat mcmadai sehingga crane kapal tidak perlu
bd:eqa, al-an tctapi scbalrl-nya Jrka mdakukan bongkar muat di Irian Jaya maka fungsi dari
untu~ mcnjalankan tuga~ bongkar muat sangatlah penting.
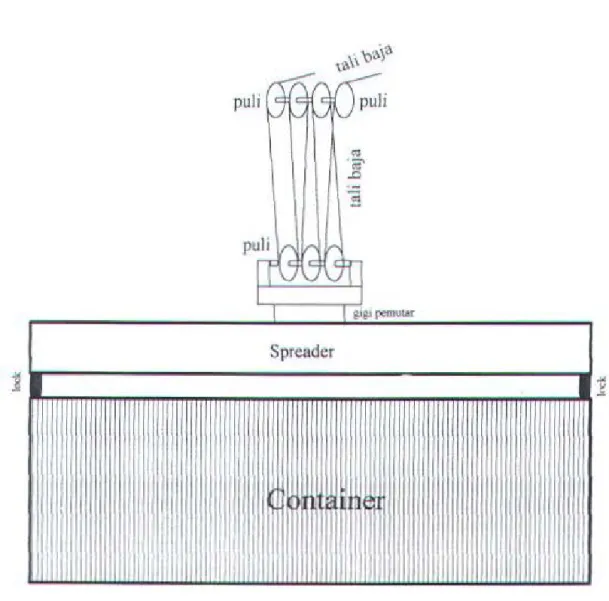
1.1. Pl'nanganMn \lulltlln
Cara mcnanganr muatan pada !-a pal lla~ u l'nma mular dari proses bongkar dan 1-apal
par dimuat kcndaraan pengangkut (trui-) atau proses sebaliknya selama ini dengan dua
pat buah 1<tl1 bap ~ang Ull~atbn pad:~ ~<.:<.:mp:ll SISt contatnc:r. sedan~an untu!- container
harus rncnggunakan hatang 'pr<"ader (!.,arena hal in1 merupakan persvaratan agar mer !Ida~ tc~tadl pcrnO.:ng~n~an ,t:fmna proses pcngangkatan bcrlangsung). Bentuk
IOil>ck
-
IIUSS peng1kat
balang pengunct
I
)I batang pengunciI ck
l
p
' - - ---"
Gam bar -1.1. gam bar spreader umuk container 40 ft
Pengikatan muatan langsung ddal-u"an okh pdel)a dengan J3lan nat~ d1ata' muat:~n dan ntdakukan peng~katan (lockmg) dcngan menggeser tuas pada kedua stSt spreader
Proses peng~katan tnt sanga1 membahayakan keselamatan para pekerja. karena diatas pengtkatan terhubung dengan cargo hook. Lebih JCiasnya akan dapat dilihat pada gambar maka dari data tcrsebut akan dilakukan analisa dan modifikas1 \ang <cmula
0 0 • f :~:
r::
~ : :: ' / - ' li!1
o'lo -\jo·O
; 0 " J~
~b;;.~~
dg~
SpreaderGam bar 4.2. gam bar pcrlcngkapan bongkar muat pada kapal Bayu Prima
Pada gam bar 4.20 pcng1katan dan pclcpasan spreader dan tali yang menghubungkan
cargo hook mcmcrlukan t.:naga manus1a. pro'e' lod mg contatner dllakukan manual
mcnank tuas pada tcngah-tcngah spreader (gam bar .J I.) dan spreadl!r dapat berg.:rak
Ai'iALISA HASIL \IOJ)JFIKASI
Modlfikasr drlaku~nn agar penanganan muatan trdak melrbatkan s.:c:ara langsung
d.:ngan muatan. ~ar.:na haha~a yang dapat drtimbulkan _1r~a p.:k..:~ta lang~ung d.:ngan rnuatan Analtsa pada tugas akhrr rni al..an dtlakul..an pada
~ag:tatr-bli!,'Hin yang telah drrcncanakan untuk dilakukan perubahan, antara lain :
Srstem Spreader
Sistem pengrkatan rnuatan (locking)
Roller beanng
l. Sistcm Spcadcr
Pada tugas akhir kali rnr modiflkasi dari spreader manual (garnbar 4.1.) dirubah
un1ul.. penanganan dua buah ukuran spreader (20 ft dan 40 fi), <lengan
Jela~nya seperti pada gambar di bawah ini:
r--sltdong surface, sideshifting
r--~ding surfaces. length adJ
'
"'
r-y@Y
II
~
~~
"--..1
sliding surfaces. length a"ftJshding surface, sideshifting
u
roller bearing
Gam bar d1 atas dapat dirubah dan ukuran :?0 fi dan -10 fl. dengan penggerak motor listnk
Sliding beanng d1rancang untul. mcnggc:rakkan $Jlrcadcr dengan arah ml!mutar secara
honsontal rxrhitungan rada bah 3 ). kekuatan sliding bcanng ini sangal berpengaruh pada kekuatan pcngikatan muatan saat terjadi Joad1ng. Bearing juga harus dalam kondisi lic111
sempuma karena pada saat terJadl putaran sprcder d1harapkan gaya gesek pada beanng b1sa d1anggap nol (tldak mempengaruh1 putaran spreader).
Engsel berfungsi sebaga• pengikat sprcdcr selain shdmg bearing. Engsel ini dibuat scpcm
anak panah schingga bisa memungkmkan bagian atas dan bawah spreader dapat
dip1sahkan pada saat reparasi, engsel JUga dapat berputar mengikuti arah putaran
spreader.
Model penggabungan sprcder dengan komponen di atasnya dapat dilihat pada gam bar
Gambar di atas menunjukkan penggabungan antara batang spr.:a..ta Jcngan
lainnya, juga proses pernutaran spreader rnengb>unakan motor llstnk d.:ngan
umsi kekuatan motor I Hp karena b~asanya untuk memutar hanya diperlukan ~atu orang
peke~a. Sedangkan proses pengcrcman didesain dcngan asumsi mampu menghentikan la_iu dengan kekuatan I Hp.
G(~o;
i
puli ~j
puli"'
·~'""
.J:>·
-~ puli ~fl\
.
c
[
c:cfr
I I S•!Pr<m""' Spreader II
I
I 111111~itt~
I
I
l
I
I
i
I
ill
I
,Ill
I '
I1Jtlit\•l "''" i • ,., ' Do..•l •••l~m """'1\.'••1" ""''" I"•'·' ~.,.,J /f,ltu lro•tui
Dan garnhar -1.5 menunjukkan bahwa proses bong~ar muat uda~ mchbat~an banya~
pekerJa hanya operator dan penunjuk arah postst container sehmgga tidak ada pe~erja yang
langsung bersmggungan dengan muatan (container) Selam hast! JJ<!rancangan dt atas scmua
masih mcnggunakan peralatan yang ada, dan bobot total dan pcrancangan tidak mempengaruhi daya angkat peralatan karcna perbedaan dengan menggunakan cargo hook
(sistem yang lama) relatifsama
Hasil dari moditikast yang dilakukan pada batang spreader dapat mengatasi bcbcrapa masalah .
1. Masalah pengoperasiannya sudah tidak melibatkan pckerja secara langsung. Karena dulu
pengikatan container memngunakan jasa pckcrja jadi pengikatannya pasti tcpat
scdangkan hasil modifikasi pekerja tidak langsung bersinggungan dengan muatan maka
harus ada alat yang menyatakan bahwa muatan tersebut siap atau belum untuk dilakukan pengangkatan.
2. Satu dcsain batang spreader dapat dtpergunakan untuk dua jenis ukuran spreader 20 ft
dan 40 ft, sehingga tidak akan membahayakan jikalau mutan overload.
Untuk mcnyelesaikan masalah tersebut di atasa maka dalam tugas a~htr tnt Juga direncanakan menggunakan motor listrik untuk memutar muatan, serta mempergunakan
sensor (load sensor} untuk mengetahui apakah muatan siap dilakukan pengangkatan (aman
untuk loadtng muatan) atau tidak. Seperti gam bar 4.3 menunjukkan penggunaan motor listrik
.2. Pengiluuan 1\fuatan
Pcngrkatan pada muatan menjadi salah satu faktor yang sangat pnting karena hal mcnunJukkan bahwa muatan siap untuk dilakukan pengangkatan atupun belum,
lam proses ini diperlukan adanya komunikasi dari peralatan lock menuju operator crane. h jclasnya sepeni ditunjukkan pada gambar 4.6.
ro ondikator lamp
Spring loaded contac plate
Gam bar 4.6. gam bar pcrlcngkapan penb>ikatan container
Sprcadcr has1l p.:rancangan 101 drrcncanakan menggunakan srstem penguncran
pada kcdua StSI, anm,·a bah\\a $3lu m01or menggerakkan 2 buah lock Scpcni pada gambar 4.6 saat spreader diturunkan dan menyentuh container rnaka plat y•ng dipasang oretuk mcmberi infn~111asi ):'ada motor t•r.lunk mebkukan
Pada pro~;, sdanrum~a 'ch:IJh mutor mclakukan pengunc1an muaran maka
1uk memasriJ..an hal tersebu1 harus ada mfonna.sr bahwa proses pengrkatan sudah selcsai
mua1an s1ap untuk d1angkat.
Di sini d1perlukan indika1or unluk proses rcrsebut, dalam hal ini direncanakan dengan nggunakan 3 indikator larnpu :
Pada saat spreader telah rnenyentuh container maka hal tersebut diindikasikan dengan lampu yang berwama hijau
Proses penguncian muatan oleh moror maka dundrkasrkan dengan lampu yang bcrwama
kuning.
Setelah 1nuatan siap diangkat maka akan ada indikasi dari lampu yang berwama merah,
sehingga operator crane dapat melakukan pcngangkatan muatan dengan aman.
Untuk lebih menjelaskan alur kerja sistem penguncian muatan maka discrtakan pula rangka11an elektronik sederhana (lampiran) proses J..erja dari pada sensor penguncr Di sini harus dnekankan bahwa sistem penguncran muatan im akan tedadr rntcrlock pada kalau scmua persyaratan pengangkatan ridak dipenuhi, sehingga udak ada inan terjadinya pcngangkatan muatan dalam kondrsr muatan benar-bcnar 1crkunc1
spreader. Hal ini untuk menghindari terjadinya kecelakaan juga menjaga kcamanan muata.n itu sendiri.
Pada bab Ill telah dilakukan perhnungan pcrcncanaan untuk roller bcanng dcngan muatan penuh. Speck dari roller beanng hasil pcrancangan muatan adalah :
Jumlah p.:na pmoon I 39 3. !.char ponoon 7 em
Rollc.r h.:anng '"' 11dak menJado satu-satunya mik tumpu muatan rnelainkan ada kait rbentuk engscl rada rusat spreader scbagai titik tumpu muatan. Selain menjadi pusat pu muatan juga sekaligus berfungsi menambah faktor keamanan jika sewaktu-waktu ada
kan roller bearing, engsel dapat mencegah tcrjadinya mutan jatuh (saat loading) Bentul. desain engsel adalh seperti gambar.
J Kait bagian at as
1/
I
k ait bagian bawahr
..,
Gam bar 4 7. gamhar eng...: I srreadcr gambar:
Gam bar di atas menunjukkan posisi engsel pada pusat spreader.
Roller bearing juga didesain agar licin sempuma sehingga tidak menjadi penghambat putaran spreader saat operator crane mclal.ul.an putan spn:dcr untul. mcngatur muatan dalam penataan di kapal maupun proses pengangl.utan pada truck.
Al"iALISA SISTDI TALI
Tali pada rancangan tugas akhir ini tetap mcnggunakan ukuran tali yang lama. hanya
uk pull pcngarah talinya yang berbeda Gambar 4.8 m..:nunjukkan pcrb..:daan antara
tali yang lama dengan desain hasil modilikasi
puli
.~ o;'
.c
sistcm puli baru sisrem puli lama
Gambar 4.8. gambar perbedaan alur tali
Diameter hasil desain dengan poli pada crane yang lama lebih besar schmgga
ungkinkan untuk pemasangan tali lebih mudah. Bcrat cargo hook dan spreder sebandmg,
ini dapat dilihat crane pada kapal Bayu Prima juga meng!,>unakan spreader manual untuk
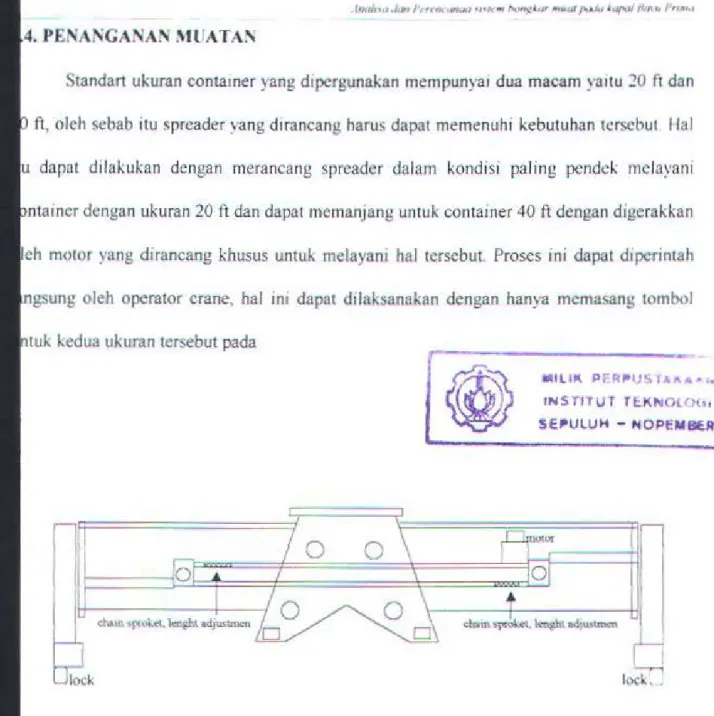
PENANGANAN ~HI A TA:"
Standan ukuran contamer yang dipergunakan mempunyai dua macam yallu :?O ft dan
ft, olch sc:bab itu spreader yang dirancang harus dapat memenuhi kebutuhan tcrscbut llal
dapat d1lakukan dcngan merancang spreader dalam kondisi paling pendd mclayani
ncr dengan ukuran 20 li dan dapat memanjang untuk container 40 ft dengan digerakkan
motor yang dirancang khusus untuk melayam hal tersebut. Proses ini dapat dipcrintah
l..edua ukuran tcrsebut pada
Gambar 4.9. gam bar spreader 2 ukuran
llltUK PFR~IJ~r ~•• •• "
INSTITUT Tt:KIIiOlOho
SEI'ULUH - NOPEMBEII
I
0
toe~. _Dikarcnakan modifikasi pada kapal semi container maka perancangan sistcm spreader
harus dapat diganti dengan cargo hook b1asa untuk melayani muatan yang tidak d1kemas
dalam container. Proses penggantian dan spreader menjadi cargo hook masih dllakukan
dengan cara manual yaitu dengan rnelepas spreader dari tali baja kemudian diganti
dengan memasang cargo hook yang lama. Sehingga kapal hanya berfungsi sebagai kapal
full container. Pada kenyataannya dilapangan kapal Bayu Prima hanya dtfungstkan scbaga1 kapal container.
ll \U ,.
h:ESI\IPl Lr\ '\
.
":ercJas:an\an anallsa dan perancangan srst~rn bonkar muat pada kapal ~c1111 wnwut.:r d.tp.tl
rik kcsnnpulan
Pcngapltkasian sistcrn bongkar muat dcngan menggunakan cargo hook Jan spreader
manual ~ang mcftbatkan banvak pekcrJa "urang bisa dijamin keselamatan re"c~ta ~;mg
tcrhbar
Modrli"asr dcngan memanfaatkan komponen )311£ tclah tcrpakai dan hanya mengubah
sistcm penguncian countainer dengan cara otomaus schingga tida" membutuhkan pdc~ja
yang langsung bersentuhan dengan muatan sehingga kaarnanan akan lebth tcrjamin dcngan tidak mcngurangi kecepatan proses bongkar muat. Modifikasi ini a"an lcbth
scmpuma jika pcngubahan dan pelayanan untuk muatan container kc cargo dapat teraphkasr pada satu alat sehrngga tida" pcrlu mengubah dari spreader kc cargo hoo".
tetapi hal mr Jarang tefjadr "arena pada kenyataannya kapal semr contarner Jarang
mengangkut muatan dengan dua macarn muatan (cargo dan container) sccara ber~ama
U.HT.\1{ I' I "I \h.\
N Ruden~<' 199~ "If<''"' l'em11ulah Hahun".l rlang~a. Ja~artJ
l(alrnar. 1996, "llllru<tlllll ,\/ml/lal Colli( 'hc1111 I J/(/l.J:'0--1511 ... 1-:almar lndu~lrl S\crig<'
All, S".:d..:n
AilS, 1988, ·Rei.!'''''" Of (argo (ic!ar .. _ Mala\~ra lnt.:mational Shrpping Co. Berhard.
Malaysia.
Day. D. A. 1991. "( 'ollll'llc'llon l:'qwpmenl (iuul,•. :!'"1 lcdllum"_ Jonh Vir!.:) & Sons.lnc. N.:" Yorl..
Rochrnanhadi, 1997, "Alai-Ala! Berai/)an Penggunllmlm·,/· YBPPU. Jal..ana
Wilopo J, 1999, "Manotemen A/()( Ko111mks1. /)Jklal Me!od<' Km11ruks1 /Jan Ala1-Aiu1
Hc'ra(', Uni\'ersitas Tarurnancgara, Jakarta.
:0 0 ~ ~ )> 0 0 ::l
....
..
C>"'
0 !" "0 0 "0..
...
0 ~ 0-
-2)
•ID
:
..
---~---1 --- - ---· 8::
-
.
t\
'!or
I ' • ' I'l
,. '
'•
'
'
'
f.
~: •!
fi];• .• ~ • • , . I I ~ . ~ '·EI ~I 1- t"--.:---l'• I" • I •'•.
10 11~~---:#--
---'
'•
9 •~
• I 'r
:
::C:(i]
,.----
,,..---gl
iiiiUI
rmrr~~-"Ulllll'
IIIIII@
-1) '' I•
'
t
l
'' 1~
__
·
~
"K
I
}
mffi
flHK~I
~
i!i
HKIH\HW
HH~~III
o
r
-
,
u
5 3 ( /"
"
"
II I I II" --t
II I XI"
..
.
II • I -::. , '..
-~""' ·1~
.
~
6" I - -- ,. - -- - -'- . X:;? .""''' Allernnlive on machines with torw-3td till
~ 1\fternativc on ASS machines
-3 / , .... '.-" ..j' '> ../
\
.
.y
,/
4
' ,
/
·~,.
3v'i/
1. Conlrollevor
2. Goar wheel 3. Inductive sensor
4. Activator
5. Terminol boron the top lilt
G. Hydraulic valvo lor rotation motor supply
7. Switch. bridging ot rolalkln stopper
8. Rcloys 16, 19, 26. 27
9~ IPS-unit 1
10. IPS·unll2. instD.Ilnlion :.hem:allvo IOf nSS.m<11<:hlnos
11. Electric servo system, scnos A20350·A20356
"~~
:;r':l\'
'::1--
·
(') Q :T - Q)I 3
~
a.
"
o
g
o
0 I ,.. ::IJ (J) m (i' n -~ O o (10 ' (/) Ill n <11 :J.<
'S?- o 6' Ill ::J -c Ill -(10 3:r '< a. ~
..
s.
;;· ~ ~..
•.,
0""
~ 0 :! .."
"'
2. 0.,
"'
~..
0 ~ n..
"'
J
•
'
SE ELSYSTEM OC2 ELSERVO CC~
:..-..
.
.
, ~·.
,
3o IT~
~
,,,.,..
.
f! 7qm;;
I
XJ
12 8t
m oo• 10 "" 9 f tO 7. Manoeuvre valve8. Micro-switch lor right hand door, closes the circuit
when tho door is open
9. Micro·switch lor left hand door, closes tho circuit when the door is Of)(ln
10. Limit switch, closes the circuit 'when the cab Is moved
100 mm forwards.
11. Relay 28 in electrical central unit
12. Switch lor cab positioning
13. Main switch, electro·hydraulic servo. 14. Electrical connector lor manoeuvre valve 7.
m ii' 0
-"'
Oo <D '"'"'
0 <D ::l.<
-go 5' (/) ::J-c: (/)c;
3"'
-ol~~
E
0
6 (/) § .lllli1.LU·~~ ~ c: -o.,
0 :l..
<>. X:..
~~
0"'
CD"'
0 ~ 0 0 0"'
1 I J I • • • • • •. • • • • •.• .. ) ) I l l ~~Wttltl I11
1'
I~3~:~.,
•
@ 4 1:! I I I I ' ' 71. Red wacning lamp, suppot11-acks ralsod
2. Green !<>mp. suppo<tlad<s lowered 3. Switch $uppor1Jatk$ RAISEILOWER
4. Electrical central unit
S. Ael<>ys
34. Coolfal Ol suppOO)ac:i<S O( OYOiio<td 3S.Indialli<ln support j&tk$ roioed 36. lndicali<ln suwo<'lac:i<s towered
37.1nvertlng ol • signal to· slglO<ll
..
.
3
G. Se oloctr~ sarvo syslom
7. Inductive son.sors. ectival0<1100 mrn
pr$or 10 rn.a•ltnum ltovot
I. Right suppoll lac~ rnlsod 2 Lollsupporllack raised 3. Righi suppon)ac:l< towered
4. Lett supponlaek lowerod 8. Hydraulic valve. hydrauic
tylndor supply \~
.7
,
~-'
-·
( ) ~ -::r - IllI
3
~ -aa.
o
g
o
0.,..
:o
'en
m (i" !!...
o
o
m ' II> Ill 0 <1> ::l- ~ "2- oo·
"'
::l '<~
3~~
-.,
.
' ~·-,f!
l
:..
__
~~
-
--
.
I.
. . . ' : I-..
f
.
~
;
I!
=~
,
.
·-
·
~
..
l._!
•.1
-' . _J, "II' f~IS'AJ l··
''
·:
l•'r,
;
•r
!'·•
'l
cr:'
{
'·t; II t:, <t ''J ·~,f.
,
''•
~•• ~::• • t C~I ! ' ·'"'t"'• I . ~-1 -. : ·:,· i t":i , , ... ; : • ., ·:; ·: t:• 'l~ r ; 't ., , ... .. , :l! ' " Ill; 'Il'l
,
.
;
,
'
:
;
;:
z
!
•I 'lI
tt
,!i'·i1.
,,
rt---'
'
I ~ t-- ~-/ ; I ~·
'
~
~
1---t-~
-
~
·
~----
I
, L ' I '..
i •..
~ "-
-..
••
...
'
-
--e
.
~
~i
r
F.!
,._ !:•
I
r l·
-..
·!:-
_
..
! ...1-
I
I• I I I..
' !. ~"'" t • a • • I V . I ! ~' ~!i
1.1
.
/
I
.
~ t I ! ' . I:c
ro ~ j I ~-/ :.
u~.--~\--_.,
"'
I ( . J ;i!i\h--' --
.
-,----
-- ...
·
,-I
!
I
t-"-j'(
v
.
...
!
i
..
.
§<1....
• I 1I
I ! Iy
"
0f
'
~
u·
·I
.
""
.
-~TI
i
i
,_~
-
----1
I • I
I
,..
I
i 1 : . · · :m ,_ • I-=---
I - : ·L--·-r::-
-
j•
I • I • I-
r
Ia
r
Ir
:,
.
' ' I.
... ' . · eiD
:
I: ·
•"
•I
...
~~,.
-
.... -·
.
....
·
~
·
~
I
i.
-i
i_l_
f---·-·
1
~
.1.,
~
' GJ
~:
-t----1..:~
-
~
L _ _~o
n
L_.i_
~~~!
\.J
'
I
a
[
l
I:
/:
:!
I
.
i
I
I
-
I
I\l
i,
,
~
_.
-:Y ... '"' J<.;. "".f1
I
~
; .. . - ... -..·
~..)!IL_
tj.._
-
~
L
L.. ... _1 .. .:. . -·-
--;---
-
- _
_,
_
_
----
~
~
·=
:~J
" > ,.,~ ·c \ <:-'i..
.
-.
-,J_
.. ~l~~ ~i ~ .. ?...
":'"0...
v•:...
~ C!i~•
'
...
.
~..
~~= I : '.:.·
:
-:- ...
! . I..
,.
I
!
,
I..
.
I --' '-' I ~·.,
I \ "\ ~ .. ·~:.. . : ':
\ 1 1. . . -r
iI
.
I
·.
-:J·
r
F
·
+
-
-
:
~/
"~·Q I .'':.!:_
.
,,.,
' •I • I I ! ! . I iI .
I
I'
'L
I I ;i
I ; Il
., .l.._._ ) 1 • ~ - . . L .,i
I,\.;
.
L
I.J.
. ...-
··+\
,. ,!
,'
; .
I ·
-
.
;
-
...
. \
.
.
t_/
I~
..
:~
.. _. ..
~
.. ,
.. : ..
)
.r
-
~
..
•
~ll
~\
J
,
·L
H·
I·
I
·
l
·:. 'l ' ;,'l ·\ 1 ; ..
.
.
~ ... ;;·
... ·...
.
'....
....
...
.... .
1-
,
,
!
1-
~:...,...
.
..
.
.
,
I
:L_j!--+
--+---.
81
'
il ,...,-;----'• l . ,_
.
.. ;;• • ..
I.
.
-• I:
.
.
..
.
·
--
-
-··
..."'
-
-
-
-
·
·--·-.•
•
·,
'.
,...
-
..
-
..
···-!
·
.
.
~ 11 -~~
~·
.
I:
~ i ' • Il
I
I
l :
i.'
I
JJ
~
~
.
....
..
,
~~~·
. .
r
::l • ee
•
. I..
r
•t
• ooot •• - -- •.I
•.
I
I'
~.
-••
• r I,.;---
· -·' ' <:> !I . '1 I
"'
-~ cI
I
I
I
-~+----1I
I
r---
-·
-' • ! -......
Qr
•
·
;:
:::i
~I I : Q'.l
~ :::d
' :L1=
..
I I,.
l.
I,.
•~f
·,
' ' • '•
~ 'a
•
I ' • .' • '-
·
l
-
·
' ' •.
.
•···-·
'· ·~ J.
,
.
t=
.
.
.•
.
.
,_..
l-
..
..,.
.
·