PERANCANGAN KAKI ROBOT PENARI GAMBYONG BERBASIS Perancangan Kaki Robot Humanoid Untuk Robot Penari Gambyong Berbasis Mikrokontroler Atmega8535.
Teks penuh
Gambar
Dokumen terkait
Pergerakan dari robot berdasarkan pada koordinat sumbu X, sumbu Y, dan sumbu Z, dimana robot akan berjalan menuju koordinat yang ditentukan apabila telah menerima inputan dari port
belok kiri kemudian maju mengikuti garis dan simpan barang saat berada di depan. rak jika tidak robot akan maju mendeteksi garis sampai
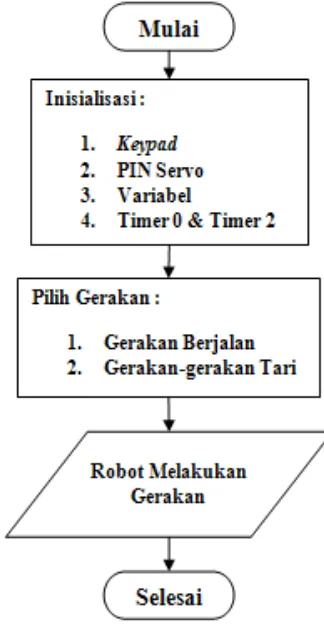
Sesuai diagram alir pada gambar 8, ketika program dijalankan, pertama kali akan dilakukan inisialisasi atau pemberian nilai awal pada PIN yang digunakan untuk
Lengan robot penyortir benda berdasarkan warna adalah lengan robot yang digunakan untuk melakukan pekerjaan secara otomatis menyortir benda berdasarkan warna merah, hijau
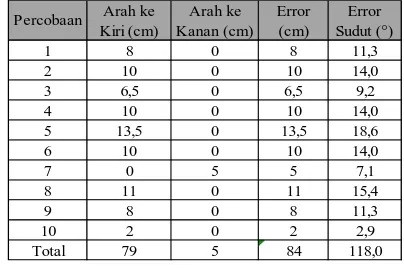
kemudian dari gambar grafik robot yang manari dengan kontrol dari sensor terlihat saat sudut dari roll maupun pitch melebihi 17,5 atau 20 derajat, maka langsung
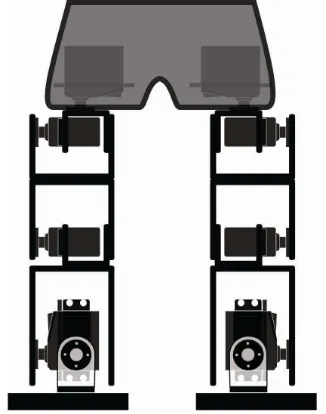
Dengan Perancangan Robot Humanoid permasalahannya adalah Dengan mengatur sudut masing-masing motor servo, torsi dari motor servo sesuai dengan berat robot, pengendalian motor
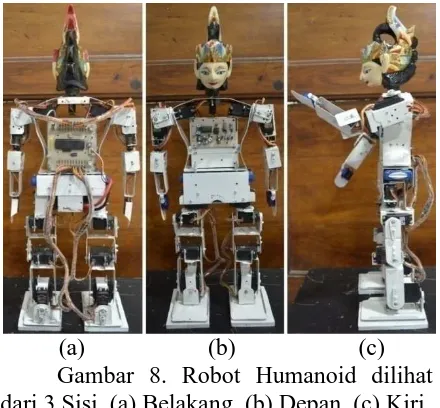
Pengujian terakhir adalah pengujian robot Hanoman Duta yang mana pada pengujian ini gerakan robot berjalan digabungkan dengan gerakan tarian Hanoman Duta dan
Dengan ini saya menyatakan bahwa isi sebagian maupun keseluruhan Tugas Akhir saya dengan judul “RANCANG BANGUN ROBOT PENARI HUMANOID DENGAN 25 DOF UNTUK MELAKUKAN
