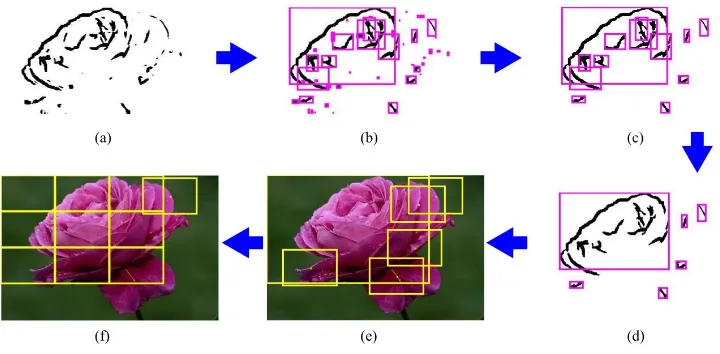
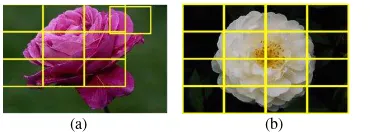
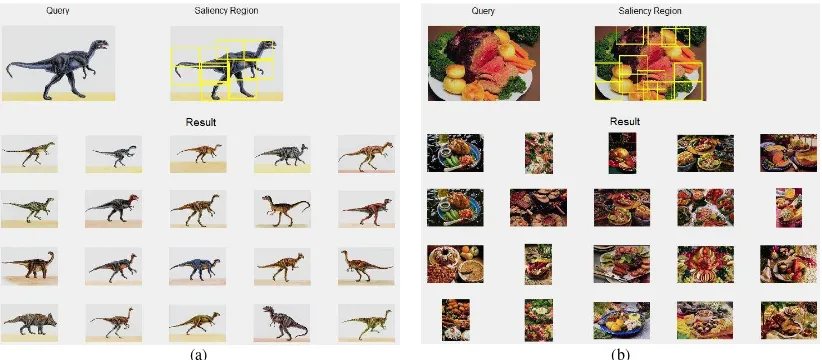
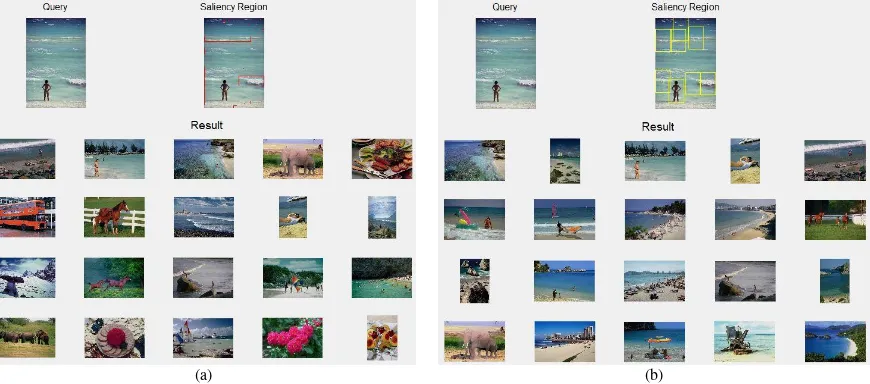
A FLEXIBLE SUB-BLOCK IN REGION BASED IMAGE RETRIEVAL BASED ON TRANSITION REGION Ahmad Wahyu Rosyadi, Renest Danardono, Siprianus Septian Manek, and Agus Zainal Arifin
Teks penuh
Gambar

Dokumen terkait
Konversi pakan merupakan perbandingan atau rasio antara jumlah pakan yang dikonsumsi oleh ternak dengan produk yang dihasilkan oleh ternak tersebut. Konversi pakan
Yang menjadi kajian dalam penelitian Tindakan kelas ini adalah rendahnya hasil belajar siswa dalam pembelajaran matematika sub pokok bahasan penjumlahan pecahan.. Hal
Negara Republik Indonesia melakukan penambahan penyertaan modal Negara ke dalam modal saham Perusahaan Perseroan (Persero) PT Sarana Multi Infrastruktur yang didirikan
Upaya Meningkatkan Nilai-Nilai Keagamaan Anak Usia D ini Melalui Metode Bernyanyi.. Universitas Pendidikan Indonesia | repository.upi.edu
telah memelihara sarana dan prasarana sekolah yang ramah lingkungan dengan sangat baik,. dimana 36 responden (63,16%) menjawab sangat baik, 14 responden (24,56%) baik
periode Januari 2005-Desember 2007 berdasarkan umur...39 Tabel 4.2 Distribusi penderita kanker serviks di Rumah Sakit Immanuel Bandung periode Januari 2005-Desember 2007
Hal ini menunjukkan bahwa hipotesis yang diajukan pada penelitian ini ditolak atau tidak terdapat perbedaan yang signifikan pada kompetensi sosial siswa SMA Sedes Sapientiae
Pada hari ini Senin tanggal Tiga Puluh Satu bulan Agustus tahun Dua Ribu Lima Belas, bertempat di Sekretariat ULP Provinsi NTT pada Biro Administrasi Pembangunan
