46
BAB IV HASIL PENELITIAN DAN PEMBAHASAN
Bab ini menjelaskan mengenai hasil dan pembahasan dari penelitian yang telah dilakukan.
A. Hasil Penelitian
Pengambilan data pada penelitian ini dilakukan untuk menguji keseluruhan sistem, yaitu dengan skenario yang telah dijelaskan sebelumnya. Hasil dari pengujian sistem akan dijelaskan pada sub bab di bawah ini.
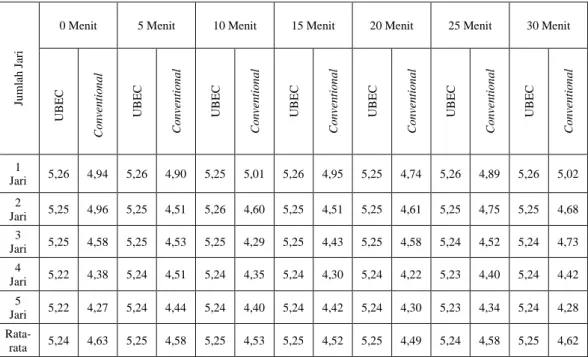
1. Hasil Pengukuran Arus Regulator UBEC dan Regulator Conventional Dari percobaan pengukuran arus pada prosthetic hand dilakukan percobaan sebanyak lima kali. Percobaan 0 menit pada tabel merupakan startup awal pada saat bergeraknya jari atau motor servo. Percobaan pengukuran arus berlangsung selama 30 menit dengan pengambilan data setiap 5 menit percobaan. Hasil pengambilan data arus pada prosthetic hand dijelaskan pada Tabel 4.1.
Tabel 4.1 Hasil pengukuran arus (ampere) regulator UBEC dan conventional
Hasil pengukuran arus pada regulator UBEC dan conventional terukur hampir sama, hasil yang diperoleh tidak jauh berbeda diantara keduanya. Saat menggerakkan 1 jari selisih UBEC dan regulator conventional tidak jauh berbeda
Jumlah Jari
0 Menit 5 Menit 10 Menit 15 Menit 20 Menit 25 Menit 30 Menit
UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional
1
Jari 0,39 0,27 0,44 0,42 0,45 0,42 0,44 0,42 0,45 0,42 0,48 0,42 0,44 0,42 2
Jari 0,77 0,39 0,82 0,82 0,77 0,78 0,83 0,80 0,77 0,80 0,76 0,85 0,79 0,82 3
Jari 0,83 0,72 0,97 0,95 0,93 0,93 1,05 0,99 0,92 0,98 0,89 0,89 0,94 0,95 4
Jari 1,02 0,82 1,01 0,97 1,02 0,97 1,02 0,98 0,99 1,19 1,02 1,07 1,06 0,94 5
Jari 0,89 0,97 1,19 1,17 1,17 1,15 1,14 1,15 1,16 1,13 1,18 1,15 1,38 1,14 Rata-
rata 0,78 0,63 0,89 0,87 0,87 0,85 0,90 0,87 0,86 0,90 0,87 0,90 0,92 0,85
47
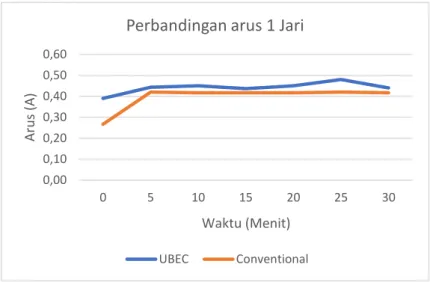
dan ini terjadi pada kedua regulator sampai menggerakkan 5 jari. Perbedaan terjadi di startup regulator UBEC lebih tinggi dari regulator conventional akan tetapi di pengukuran 5 jari, regulator conventional lebih tinggi. Perbedaan dapat ditunjukkan pada Gambar 4.1.
Perbandingan grafik arus pada kedua regulator saat menggerakkan satu jari, perbedaan pada keduanya tidak memiliki selisih yang jauh. Tetapi startup regulator UBEC arus terukur lebih tinggi dari regulator conventional dan arus yang terukur sekitar 0,39 ampere sedangkan regulator conventional 0,27 ampere.
0,00 0,20 0,40 0,60 0,80 1,00
0 5 10 15 20 25 30
Arus (A)
Waktu (Menit)
Perbandingan Arus 2 Jari
UBEC Conventional 0,00
0,10 0,20 0,30 0,40 0,50 0,60
0 5 10 15 20 25 30
Arus (A)
Waktu (Menit)
Perbandingan arus 1 Jari
UBEC Conventional
Gambar 4.1 Perbandingan arus 1 jari UBEC dan conventional
Gambar 4.2 Perbandingan arus 2 jari UBEC dan conventional
48
Perbandingan grafik arus pada kedua regulator saat menggerakkan dua jari, perbedaan pada keduanya tidak memiliki selisih yang jauh. Tetapi di startup regulator conventional arus yang terukur lebih rendah dari regulator UBEC sekitar 0,39 ampere sedangkan regulator UBEC terukur 0,77 ampere.
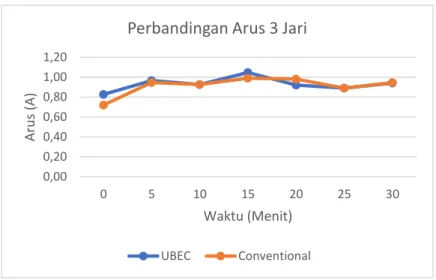
Perbandingan grafik arus pada kedua regulator saat menggerakkan tiga jari, perbedaan pada keduanya tidak memiliki selisih yang jauh. Startup regulator conventional, arus yang terukur lebih rendah dari regulator UBEC sekitar 0,72 ampere sedangkan regulator UBEC terukur 0,83 ampere.
0,00 0,20 0,40 0,60 0,80 1,00 1,20
0 5 10 15 20 25 30
Arus (A)
Waktu (Menit)
Perbandingan Arus 3 Jari
UBEC Conventional
0,00 0,20 0,40 0,60 0,80 1,00 1,20 1,40
0 5 10 15 20 25 30
Arus (A)
Waktu (Menit)
Perbandingan Arus 4 Jari
UBEC Conventional
Gambar 4.3 Perbandingan arus 3 jari UBEC dan conventional
Gambar 4.4 Perbandingan arus 4 jari UBEC dan conventional
49
Perbandingan grafik arus pada kedua regulator saat menggerakkan empat jari, perbedaan pada keduanya tidak memiliki selisih yang jauh. Startup awal regulator conventional, arus yang terukur lebih rendah dari regulator UBEC sekitar 0,82 ampere sedangkan regulator UBEC terukur 1,02 ampere.
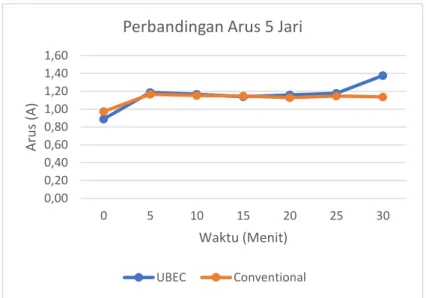
Perbandingan grafik arus pada kedua regulator saat menggerakkan lima jari, perbedaan pada keduanya tidak memiliki selisih yang jauh. Startup awal regulator conventional, arus yang terukur lebih tinggi dari regulator UBEC terukur 0,97 ampere sedangkan regulator UBEC terukur 0,89 ampere. Tetapi disaat pengujian di menit 25-30 menit, regulator UBEC mengalami lonjakan arus mencapai 1,38 ampere.
Gambar 4.6 Perbandingan rata-rata arus regulator UBEC dan conventional
0 0,2 0,4 0,6 0,8 1
0 5 10 15 20 25 30
Rata-rata arus(A)
Waktu (Menit)
Rata-rata Pengukuran Arus
UBEC Conventional 0,00
0,20 0,40 0,60 0,80 1,00 1,20 1,40 1,60
0 5 10 15 20 25 30
Arus (A)
Waktu (Menit)
Perbandingan Arus 5 Jari
UBEC Conventional
Gambar 4.5 Perbandingan arus 5 jari UBEC dan conventional
50
Hasil perbandingan grafik rata-rata arus pada kedua regulator menunjukkan tidak mengalami perbedaan, terjadi perbedaan rata-rata hanya saat startup awal. Hal ini disebabkan karena beban pada kedua regulator sama.
2. Hasil Pengukuran Tegangan Regulator UBEC dan Regulator Conventional
Percobaan pengukuran tegangan pada prosthetic hand dilakukan percobaan sebanyak lima kali. Percobaan 0 menit pada tabel merupakan startup awal pada saat bergeraknya jari atau motor servo. Percobaan pengukuran tegangan berlangsung selama 30 menit dengan pengambilan data setiap 5 menit percobaan. Hasil pengumpulan data tegangan pada prosthetic hand dapat dijelaskan pada Tabel 4.2.
Tabel 4.2 Hasil pengukuran tegangan (volt) regulator UBEC dan conventional
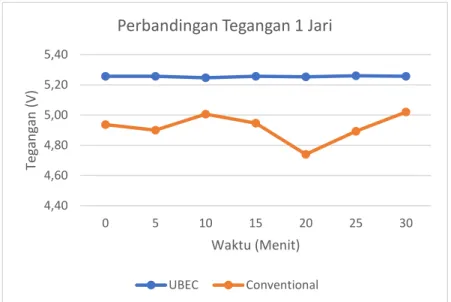
Hasil pengukuran tegangan pada regulator UBEC dan conventional menunjukkan perbedaan, tegangan output yang keluar dari regulator conventional mengalami drop tegangan, sedangkan regulator UBEC memiliki kestabilan yang baik. Regulator UBEC stabil terukur sekitar 5 volt sedangkan regulator conventional terukur sekitar 4 volt. Perbedaan dapat ditunjukkan pada Gambar 4.7
Jumlah Jari
0 Menit 5 Menit 10 Menit 15 Menit 20 Menit 25 Menit 30 Menit
UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional
1
Jari 5,26 4,94 5,26 4,90 5,25 5,01 5,26 4,95 5,25 4,74 5,26 4,89 5,26 5,02 2
Jari 5,25 4,96 5,25 4,51 5,26 4,60 5,25 4,51 5,25 4,61 5,25 4,75 5,25 4,68 3
Jari 5,25 4,58 5,25 4,53 5,25 4,29 5,25 4,43 5,25 4,58 5,24 4,52 5,24 4,73 4
Jari 5,22 4,38 5,24 4,51 5,24 4,35 5,24 4,30 5,24 4,22 5,23 4,40 5,24 4,42 5
Jari 5,22 4,27 5,24 4,44 5,24 4,40 5,24 4,42 5,24 4,30 5,23 4,34 5,24 4,28 Rata-
rata 5,24 4,63 5,25 4,58 5,25 4,53 5,25 4,52 5,25 4,49 5,24 4,58 5,25 4,62
51
Perbandingan grafik tegangan pada kedua regulator saat menggerakkan satu jari, perbedaan pada keduanya mengalami selisih yang jauh. Tegangan regulator UBEC stabil terukur 5,26 volt dari menit 0-30 menit, sedangkan regulator conventional mengalami drop tegangan hingga 4,74 volt.
Perbandingan grafik tegangan pada kedua regulator saat menggerakkan dua jari, perbedaan pada keduanya mengalami selisih yang jauh. Tegangan regulator UBEC stabil terukur 5,25 volt dari menit 0-30 menit, sedangkan regulator conventional mengalami drop tegangan hingga 4,51 volt.
4,40 4,60 4,80 5,00 5,20 5,40
0 5 10 15 20 25 30
Tegangan (V)
Waktu (Menit)
Perbandingan Tegangan 1 Jari
UBEC Conventional
4,00 4,20 4,40 4,60 4,80 5,00 5,20 5,40
0 5 10 15 20 25 30
Tegangan (V)
Waktu (Menit)
Perbandingan Tegangan 2 Jari
UBEC Conventional
Gambar 4.7 Perbandingan tegangan 1 jari UBEC dan conventional
Gambar 4.8 Perbandingan tegangan 2 jari UBEC dan conventional
52
Perbandingan grafik tegangan pada kedua regulator saat menggerakkan tiga jari, perbedaan pada keduanya mengalami selisih. Tegangan regulator UBEC stabilte rukur 5,24-5,25 volt dari menit 0-30 menit, sedangkan regulator conventional mengalami drop tegangan hingga 4,29 volt.
Perbandingan grafik tegangan pada kedua regulator saat menggerakkan empat jari, perbedaan pada keduanya mengalami selisih. Tegangan regulator UBEC stabil terukur 5,22-5,24 volt dari menit 0-30 menit, sedangkan regulator conventional mengalami drop tegangan hingga 4,22 volt.
0,00 1,00 2,00 3,00 4,00 5,00 6,00
0 5 10 15 20 25 30
Tegangan (V)
Waktu (Menit)
Perbandingan Tegangan 3 Jari
UBEC Conventional
0,00 1,00 2,00 3,00 4,00 5,00 6,00
0 5 10 15 20 25 30
Tegangan (V)
Waktu (Menit)
Perbandingan Tegangan 4 Jari
UBEC Conventional
Gambar 4.9 Perbandingan tegangan 3 jari UBEC dan conventional
Gambar 4.10 Perbandingan tegangan 4 jari UBEC dan conventional
53
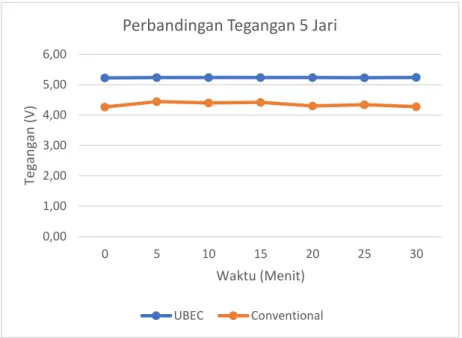
Perbandingan grafik tegangan pada kedua regulator saat menggerakkan lima jari, perbedaan pada keduanya mengalami selisih. Tegangan regulator UBEC stabil terukur 5,22-5,24 volt dari menit 0-30 menit, sedangkan regulator conventional mengalami drop tegangan hingga 4,27 volt.
Gambar 4.12 Perbandingan rata-rata tegangan regulator UBEC dan conventional
Perbandingan rata-rata tegangan pada kedua regulator memiliki perbedaan, rata-rata yang dihasilkan regulator conventional mengalami drop tegangan. Drop
4 4,2 4,4 4,6 4,8 5 5,2 5,4
0 5 10 15 20 25 30
Rata-rata tegangan (V)
Waktu (Menit)
Rata-rata Pengukuran Tegangan
UBEC Conventional 0,00
1,00 2,00 3,00 4,00 5,00 6,00
0 5 10 15 20 25 30
Tegangan (V)
Waktu (Menit)
Perbandingan Tegangan 5 Jari
UBEC Conventional
Gambar 4.11 Perbandingan tegangan 5 jari UBEC dan conventional
54
tegangan yang regulator conventional memiliki rata-rata 4 volt, ini terjadi di semua percobaan 0-30 menit.
3. Hasil Perhitungan Daya Berdasarkan Tegangan dan Arus yang Terukur dari Regulator UBEC dan Regulator Conventional
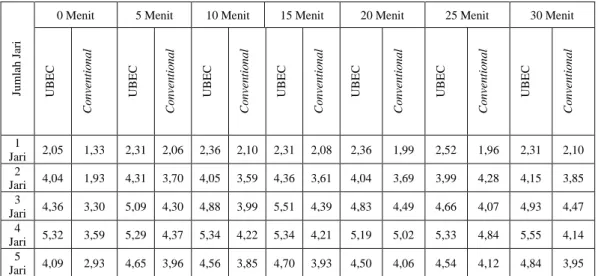
Daya prosthetic hand didapatkan dari jumlah perkalian tegangan (volt) dikalikan arus (ampere) yang terukur selama percobaan. Perhitungan daya dapat diolah dengan persamaan 2.1 pada bab 2. Contoh perhitungan daya pada prosthetic hand pada startup (0 menit) jumlah gerak jari 1 dengan tegangan terukur 5,26 volt dan arus terukur 0,39 ampere maka untuk mengetahui daya yang diserap sebagai berikut: P = 5,26 x 0,39 = 2,05 watt. Hasil perhitungan daya pada prosthetic hand dapat dijelaskan pada Tabel 4.3.
Tabel 4.3 Hasil perhitungan daya (watt) regulator UBEC dan conventional
Jumlah Jari
0 Menit 5 Menit 10 Menit 15 Menit 20 Menit 25 Menit 30 Menit
UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional UBEC Conventional
1
Jari 2,05 1,33 2,31 2,06 2,36 2,10 2,31 2,08 2,36 1,99 2,52 1,96 2,31 2,10 2
Jari 4,04 1,93 4,31 3,70 4,05 3,59 4,36 3,61 4,04 3,69 3,99 4,28 4,15 3,85 3
Jari 4,36 3,30 5,09 4,30 4,88 3,99 5,51 4,39 4,83 4,49 4,66 4,07 4,93 4,47 4
Jari 5,32 3,59 5,29 4,37 5,34 4,22 5,34 4,21 5,19 5,02 5,33 4,84 5,55 4,14 5
Jari 4,09 2,93 4,65 3,96 4,56 3,85 4,70 3,93 4,50 4,06 4,54 4,12 4,84 3,95
Jumlah konsumsi daya pada regulator UBEC dan conventional menunjukkan perbedaan, jumlah daya regulator conventional mengalami ketidakstabilan, sedangkan regulator UBEC memiliki kestabilan yang baik. Daya regulator UBEC stabil di sekitar 4 watt.
4. Uji Prosthetic Hand
Uji prosthetic hand dilakukan untuk mengetahui pengolahan mikrokontroler dan sensor electromyography pada system prosthetic hand berbasis Universal Battery Elimination Circuit (UBEC) bekerja dengan baik pada subjek.
Subjek diminta melakukan gerakan genggaman dengan waktu 5 detik membuka
55
tangan dan 3 detik menggenggam, dan ini di ulang sebanyak 3 kali. Uji prosthetic hand tangan terbuka dan tangan tertutup dapat ditunjukkan pada Gambar 4.13 dan Gambar 4.14.
Gambar 4.13 Uji prosthetic hand pada subjek tangan terbuka
Gambar 4.14 Uji prosthetic hand pada subjek tangan tertutup
Penempatan surface electrode dipasang pada otot brachioradialis karena sinyal myoelectric otot brachioradialis terekam lebih bagus dari otot lengan yang
56
lainnya. Penempatan surface electrode dapat dijelaskan pada Gambar 4.15 dan Gambar 4.16.
Setelah pengujian prosthetic hand pada subjek berfungsi dengan baik, kemudian dilakukannya perekaman sinyal myoelectric. Perekamanan pada subjek dimulai dengan pembersihan permukaan kulit dengan alkohol 70%, kemudian surface electrode dipasang pada otot brachioradialis. Sinyal myoelectric yang terekam di filter dengan butterworth filter orde 2 yang diproses pada software Matlab 2016. Data sinyal myoelectric yang terekam dimasukkan ke dalam microsoft excel agar software Matlab 2016 dapat menjalankan proses filter untuk sinyal myoelectric. Tampilan software Matlab 2016 dapat dijelaskan pada Gambar 4.15.
Gambar 4.15 Tampilan software Matlab 2016
Proses filter dilakukan untuk memperjelas data sinyal myoelectric dimana untuk menghilangkan noise diperlukannya filter butterworth filter orde 2. Hasil filter butterworth filter orde 2 dengan menggunakan software Matlab 2016 dapat ditunjukkan pada Gambar 4.16, 4.17, 4.18, 4.19, 4.20, 4.21.
57
Gambar 4.16 Hasil sinyal myoelectric subjek 1
58
Gambar 4.17 Hasil sinyal myoelectric subjek 2
59
Gambar 4.18 Hasil sinyal myoelectric subjek 3
60
Gambar 4.19 Hasil sinyal myoelectric subjek 4
61
Gambar 4.20 Hasil sinyal myoelectric subjek 5
62
Gambar 4.21 Hasil sinyal myoelectric subjek 6
63
Filter butterworth filter orde 2 dilakukan pada sinyal myoelectric berfungsi menghilangkan data-data redutan atau data yang membingungkan. Setelah data sinyal myoelectric difilter, diperlukan persamaan karakteristik dan normalisasi pada data sinyal myoelectric.
B. Pembahasan
Pada grafik perbandingan arus menunjukkan arus UBEC dan regulator conventional saat menggerakkan 1 jari sampai 5 jari. Grafik menunjukkan garis biru sebagai UBEC dan garis jingga sebagai regulator conventional. Saat mengukur pergerakan 1 jari dan 2 jari di menit 0-5, memiliki selisih perbedaan arus. Regulator conventional terukur lebih rendah dari UBEC saat memulai jari bergerak. Saat 10- 30 menit, besar arus yang terukur hampir sama. Arus yang terukur di pergerakan 5 jari mencapai 1 ampere lebih, besar arus tersebut terjadi pada kedua regulator. Pada grafik perbandingan arus 5 jari, besar arus terukur hampir sama, tetapi terjadi sedikit selisih pada menit 25-30. Regulator UBEC terukur lebih besar dari regulator conventional.
Sedangkan di grafik perbandingan tegangan menunjukkan perbedaan tegangan regulator UBEC dan regulator conventional. Grafik biru menunjukkan tegangan UBEC dan grafik jingga menunjukkan tegangan regulator conventional saat menggerakkan 1 jari sampai 5 jari. Tegangan UBEC saat menggerakkan jari terukur stabil di 5,26-5,22 volt, sedangkan regulator conventional mengalami penurunan tegangan hingga 4,22 volt di percobaan pergerakkan 4 jari menit 15-20 menit. Penurunan tegangan di regulator conventional terjadi di semua percobaan.
Hal ini disebabkan oleh kualitas dari rangkaian regulator, sehingga mengalami penurunan tegangan dibawah rata-rata yaitu 5 volt. Sedangkan tegangan UBEC menghasilkan tegangan cukup stabil dibandingkan tegangan conventional walaupun terjadi perubahan beban. Perbandingan regulator UBEC dan regulator conventional berdasarkan banyak jari yang digerakkan ditampilkan pada Gambar 4.22.
64
0,00 0,20 0,40 0,60 0,80 1,00 1,20 1,40
1 2 3 4 5
Ampere
Jumlah Jari
Perbandingan arus UBEC dan conventional terhadap jumlah
jari yang digerakkan
UBEC Conventional
(a) Arus (b)Tegangan
Pada Gambar 4.21 (a), menunjukkan peningkatan arus pada saat adanya penambahan beban. Hal ini wajar terjadi dikarenakan actuator bekerja semakin banyak. Terlihat ketika prosthetic hand bergerak satu jari arus yang mengalir sebesar 0,4 ampere dan terus naik mengikuti banyaknya jari yang bergerak, dan ketika prosthetic hand bergerak lima jari arus yang mengalir mencapai 1,1 ampere.
Hal ini berlaku bagi kedua regulator.
Pada Gambar 4.21 (b), menunjukkan perbedaan tegangan yang dihasilkan pada kedua regulator. Regulator UBEC menghasilkan tegangan yang stabil, sedangkan regulator conventional mengalami penurunan tegangan mengikuti banyaknya beban. Hal ini disebabkan karena perbedaan kualitas pada kedua regulator tersebut. Adapun jumlah rata-rata konsumsi daya yang diserap oleh regulator conventional dan regulator UBEC. Berikut tabel rata-rata konsumsi daya pada kedua regulator.
0,00 1,00 2,00 3,00 4,00 5,00 6,00
1 2 3 4 5
Volt
Jumlah Jari
Perbandingan tegangan UBEC dan conventional terhadap jumlah jari yang digerakkan
UBEC Conventional
Gambar 4.22 Perbandingan rata-rata arus dan tegangan pada regulator UBEC dan regulator conventional
65
Tabel 4.4 Rata-rata konsumsi daya (watt) pada regulator ubec dan regulator conventional
Jenis Regulator
Waktu (menit)
0 5 10 15 20 25 30
Conventional 2,62 3,68 3,55 3,64 3,85 3,85 3,70 UBEC 3,97 4,33 4,24 4,45 4,18 4,21 4,36
Pada Tabel 4.4 terlihat konsumsi daya regulator UBEC dan regulator conventional memiliki perbedaan jumlah daya yang diserap pada sistem prosthetic hand. Konsumsi daya regulator conventional terlihat lebih sedikit dari konsumsi daya yang diserap oleh regulator UBEC.
Gambar 4.24 Grafik rata-rata konsumsi daya pada system
Gambar 4.22 terlihat daya konsumsi regulator UBEC lebih besar dari pada regulator conventional yaitu sebesar 4 watt. Sedangkan regulator conventional konsumsi daya lebih sedikit dibawah konsumsi daya regulator UBEC, tetapi daya regulator conventional tidak stabil. Ketidakstabilan daya pada suatu sistem sangat berbahaya dan harus dihindari, karena dapat merusak sistem elektronik termasuk motor servo dan baterai.
Setelah pengukuran tegangan (volt), arus (ampere) dan daya (watt), pengujian berlanjut ke pengujian prosthetic hand pada subjek. Pengujian yang dilakukan dengan pengambilan data sinyal myoelectric pada otot brachioradialis.
Pengujian ini dilakukan untuk mengetahui sistem prosthetic hand, mikrokontroler
0 1 2 3 4 5
0 5 10 15 20 25 30
Daya (watt)
Time (minuts)
Perbedaan Konsumsi Daya pada Regulator UBEC dan Regulator Conventional
UBEC Conventional
Gambar 4.23 Grafik rata-rata konsumsi daya pada system
66
dan Sensor myoelectric bisa merekam atau menangkap sinyal otot brachioradialis terhadap subjek dengan dukungan Universal Battery Elimination Circuit (UBEC).
Dalam pengambilan data, sistem prosthetic hand dapat berfungsi dengan baik dengan beberapa kendala yang ditemukan. Sistem prosthetic hand yang diintegrasikan dengan Universal Battery Elimination Circuit (UBEC) dapat menangkap sinyal myoelectric dan menggerakkan jari-jari. Kendala ditemukan pada saat jari-jari bergerak dimana pin kancing tali pada motor servo sering kendor, sehingga pergerakkan jari-jari tidak dapat bergerak dengan sempurna. Hal ini diakibatkan pemakaian prosthetic hand yang sudah lama digunakan dan juga berat prosthetic hand terbilang cukup berat.
Permasalahan selanjutnya terdapat pada pengambilan data sinyal myoelectric. Adapun saat pengambilan data sinyal myoelectric, sempat tidak dapat direkam dikarenakan besarnya sinyal yang ditangkap terlalu lemah. Untuk menangani hal tersebut, perlu instalasi terhadap sensor electromyography berkali- kali dengan ketelitian yang tinggi hingga sinyal tersebut dapat terbaca.
Untuk mengurangi kegagalan perekaman sinyal myoelectric, pemilihan subjek berdasarkan Indeks Massa Tubuh (IMT) yang ideal, memiliki ketebalan lemak yang sedikit dan kegiatan sehari-harinya selalu aktif terutama melibatkan tangan untuk menyelesaikan aktivitasnya. Sebelum tahap set up surface electrode dilakukan terlebih dahulu dilakukan pembersihkan tangan subjek dengan alkohol 70% untuk mengurangi kadar asam pada permukaan kulit. Setelah pembersihan dilakukan, surface electrode dipasang pada tangan subjek. Diagram perekaman sinyal myoelectric ditampilkan pada Gambar 4.24.
Menentukan Subjek
Pembersihan lengan dengan alkohol 70% dan Set up
surface electrode pada permukaan kulit subjek
Penentuan letak surface
electrode Penangkapan
sinyal myoelectric
Menentukan algoritma pemograman untuk
menampilkan nilai sinyal myoelectric Menentukan algoritma
pemograman untuk menampilkan nilai sinyal myoelectric dalam
bentuk grafik
Gambar 4.24 Diagram perekaman sinyal myoelectric
67
Perekaman sinyal myoelectric dilakukan dengan 3 perlakuan berbeda untuk setiap subjek penelitian. Pada perlakuan pertama dengan kondisi bebas dimana subjek duduk tegak dengan posisi tangan digantung. Perlakuan kedua, subjek dalam posisi duduk tegak lurus dengan posisi tangan diangkat lurus ke depan. Perlakuan ketiga, subjek dalam kondisi duduk tegak dengan posisi siku tangan diatas meja dan lengan tangan diangkat membentuk 30 derajat.
Setelah perekaman data sinyal subjek selesai, data sinyal yang terekam di filter dengan software Matlab 2016 dengan filter butterworth filter orde 2. Data sinyal diolah ke dalam software Matlab 2016 untuk menghilangkan data-data yang tidak jelas. Tabel 4.5 menampilkan hasil filter sinyal myoelectric.
Tabel 4.5 Hasil perekaman sinyal myoelectric setelah difilter
Subjek Kondisi Bebas
Kondisi Angkat Kedepan
Kondisi di Atas Meja
Nilai Maksimal Subjek 1 1,17724E+14 8,23514E+14 8,10914E+14 8,23514E+14 Subjek 2 2,13287E+14 2,66052E+14 4,04075E+14 4,04075E+14 Subjek 3 5018,399345 32947,5816 34441,87705 34441,87705 Subjek 4 2,93913E+14 3,50624E+14 4,329E+14 4,329E+14 Subjek 5 1,78637E+14 2,95049E+14 4,02437E+14 4,02437E+14 Subjek 6 12340,9371 52379,50745 51867,23358 52379,50745
Setelah data sinyal myoelectric di filter, diperlukannya persamaan karakteristik dan normalisasi untuk menghilangkan data yang redutan atau data yang membingungkan. Data sinyal myoelectric yang membingungkan adalah data yang bit terlalu tinggi atau rendah. Setiap subjek memiliki karakter sendiri-sendiri, karena subjek memiliki karakteristik sendiri-sendiri jadi tidak dapat dianalisis.
Supaya data sinyal myoelectric dapat dianalisis, maka perlu disamakan karakteristiknya dan dibuat normalisasi data sinyal myoelectric. Pertama yang dilakukan adalah dengan menentukan nilai maksimal dari hasil filter sinyal myoelectric dari 3 perlakuan subjek. Kemudian menentukan nilai normalisasi dengan hasil maksimal dibagi dengan perlakuan dari setiap subjek. Tabel 4.6 menampilkan data sinyal myoelectric setelah dinormalisasi.
68
Tabel 4.6 Jumlah kontraksi otot setelah normalisasi
Subjek Kondisi Bebas
Kondisi Angkat Kedepan
Kondisi Diatas Meja
Subjek 1 0,14 1,00 0,98
Subjek 2 0,53 0,66 1,00
Subjek 3 0,15 0,96 1,00
Subjek 4 0,68 0,81 1,00
Subjek 5 0,44 0,73 1,00
Subjek 6 0,24 1,00 0,99
Hasil penelitian dan pengolahan data sinya myoelectric, diketahui bahwa besar nilai sinyal dari setiap subjek berbeda-beda. Besar kekuatan otot lengan kiri pada laki-laki cenderung lebih besar dari kekuatan otot lengan kiri perempuan.
Namun secara keseluruhan, nilai sinyal myoelectric pada laki-laki dan perempuan memiliki selisih yang tidak jauh berbeda. Sinyal myoelectric subjek perempuan dipengaruhi oleh kegiatan sehari-hari yang dilakukan oleh subjek. Semua subjek perempuan merupakan ibu rumah tangga memiliki kegiatan yang melibatkan tangan untuk menyelesaikan pekerjaan rumah. Sehingga otot brachioradialis pada tangan kiri subjek perempuan selalu aktif dan besar sinyal myoelectric terekam tidak jauh berbeda dari subjek laki-laki.
Data yang dihasilkan dari pengambilan data tangan kondisi bebas lebih rendah dari pengambilan data dengan keadaan kondisi tangan angkat ke depan dan kondisi diatas meja pada setiap subjek, itu dikarenakan kondisi bebas tidak membebani otot lengan.
Gambar 4.25 Grafik jumlah kontraksi otot setelah normalisasi
0,00 0,20 0,40 0,60 0,80 1,00 1,20
Kondisi Bebas Kondisi Angkat Kedepan Kondisi di Atas Meja
Grafik Jumlah Kontraksi Otot Setelah Normalisasi
Subjek 1 Subjek 2 Subjek 3 Subjek 4 Subjek 5 Subjek 6
69
Pada Gambar 4.25 terlihat kondisi bebas, kontraksi otot yang dihasilkan oleh otot brachioradialis lebih kecil dibandingkan pada saat kondisi angkat ke depan dan kondisi diatas meja, dikarenakan otot tidak memiliki beban hanya menggerakkan jari-jari tangan, dan ini terjadi disemua pengambilan data sinyal pada subjek. Namun percobaan nilai normalisasi subjek 2 terhitung 0,53 subjek 4 terukur 0,68 dan subjek 5 terukur 0,44. Nilai normalisasi tersebut lebih tinggi dari pada subjek 1, subjek 3 dan subjek 6. Penyebab nilai normalisasi yang lebih tinggi disebabkan subjek 2, subjek 4 dan subjek 5 mengalami kondisi tegang saat pengambilan data sinyal myoelectric.
Untuk mengetahui perbedaan di semua subjek, dilakukannya pengujian independent t-test dengan menggunakan software IBM SPSS Statistics 25.
Rekapitulasi uji independent t-test data parameter sinyal myoelectric untuk responden. Tabel 4.7 menyajikan rekapitulasi uji independent t-test dari data sinyal untuk responden. Pada Tabel 4.7 dapat dilihat dari 3 parameter yang telah dihitung bahwa tidak ada parameter yang datanya berubah secara signifikan, ini diketahui dari nilai signifikan yang lebih kecil dari nilai signifikan 5% sebesar 2,776. Hasil pengujian independent t-test dapat dijelaskan pada Tabel 4.7.
Tabel 4.7 Rekapitulasi uji independent t-test
Parameters df Significant Decision
Kondisi Bebas 4 0,818 Not Significant
Kondisi Angkat Kedepan 4 0,475 Not Significant
Kondisi Diatas Meja 4 0,148 Not Significant
Tabel 4.7 dapat dilihat dari 3 parameter yang telah dihitung bahwa tidak ada data yang berubah signifikan. Ini diketahui dari hasil pengujian levene (pengujian kesamaan varian populasi) diperoleh nilai probabilitas sig kondisi bebas 0,818, kondisi angkat kedepan 0,475 dan kondisi diatas meja 0,148. Sehingga pada hasil 3 perlakuan pada subjek memiliki perbedaan akan tetapi perbedaan tersebut tidak mengalami perbedaan yang signifikan. Pengujian independent t-test terhadap sinyal myoelectric dengan 3 perlakuan pada subjek dapat dibaca dengan baik oleh sistem kendali prosthetic hand.