PERANCANGAN PROTOTIPE
SISTEM PENERANGAN OTOMATIS RUANGAN BERJENDELA
BERDASARKAN INTENSITAS CAHAYA
Keyza Novianti
1)Chairisni Lubis
2)Tony
3)1) 2) 3)
Fakultas Teknologi Informasi, Universitas Tarumanagara
email : [email protected] 1), [email protected] 2), [email protected] 3)
ABSTRACT
Automatic ligthing system for windowless room based on light intensity is a system that able to improve the lighting quality with high efficiency in electrical consump. This system can adjust the brightness of the light in the room based on outdoor lighting condition. Both of the lighting conditions indoor and outdoor are detected by a sensor. For maximizing outdoor lighting, there is a servo motor that will move the curtain blinds position. The process of determining the movement of the curtain is obtained by using the input from the detection of both light sensors. Input is processed using the method of fuzzy logic, resulting in the desired output. There are 12 kinds of output of 25 conditions light sensor detection results. While outdoor lighting condition is bright then the curtain blinds will open so the room lighting using the ourdoor lighting, while outdoor lighting condition is dark then the curtain blinds will closed and the room lighting using the bulb in room. The test results of the system there are several mismatches with the desired results. Light sensor and curtains have been able to work together to make the decision making process for lighting, but the lighting intensity targets to be achieved can not be achieved perfectly.
Key words
Sistem Penerangan Otomatis, Penghematan Energi, Logika Fuzzy, Mikrokontroler, Motor Servo, Dimmer Lampu, Sensor PIR.
1. Pendahuluan
Permasalahan penghematan energi merupakan hal yang sangat penting bagi kehidupan manusia saat ini. Salah satu contoh penyebab adalah pemborosan penggunaan energi pada sistem penerangan. Sistem penerangan ruangan pada
umumnya hanya menggunakan prinsip on/off, yaitu menyalakan lampu pada saat ruangan gelap dan mematikan lampu pada saat ruangan terang. Sistem tersebut terkadang kurang efektif karena tanpa menghiraukan kontribusi pencahayaan dari luar seperti pencahayaan matahari. Oleh karena itu diperlukan pengaturan penerangan, baik untuk faktor kenyamanan maupun efisiensi pemakaian energi listrik. Sistem penerangan otomatis yang akan dirancang adalah sistem penerangan otomatis pada ruangan berjendela berdasarkan intensitas cahaya. Konsep pengontrolan kuat arus untuk lampu menggunakan metode logika fuzzy.
Berdasarkan latar belakang di atas, maka rumusan masalah yang muncul adalah komponen apa saja yang diperlukan dalam pembuatan sistem penerangan.dan bagaimana cara kerja sistem yang diperlukan agar tujuan sistem tercapai.
Kegunaan dari perancangan sistem tersebut adalah untuk memaksimalkan sistem penerangan dalam ruangan berjendela sehingga mencapai tingkat kualitas penerangan yang tinggi tanpa mengorbankan efisiensi penggunaan energi.
Batasan rancangan pada pembuatan perancangan sistem penerangan otomatis ruangan berjendela berdasarkan intensitas cahaya antara lain :
1. Pengendalian dilakukan terbatas pada maket ruangan yang memiliki 1 buah lampu pijar dan dilengkapi dengan blinds.
2. Tingkat penerangan yang akan dicapai adalah 300 lux (tidak dapat diubah-ubah).
3. Pergerakan tirai blinds hanya dapat bergerak dalam 5 state, yaitu 60% terbuka, 70% terbuka, 80% terbuka, 90% terbuka, dan 100% terbuka.
2. Landasan Teori
Sistem penerangan otomatis berdasarkan intensitas cahaya terdiri dari perangkat keras dan perangkat lunak yang digabungkan menjadi satu kesatuan dalam maket yang telah dibuat. Mikrokontroler akan mengaktifkan keseluruhan sistem saat mendeteksi adanya manusia yang masuk ke dalam ruangan. Mikrokontroler menerima dan mengolah input dari sensor cahaya yang diletakkan telah dipasang di dalam maket. Kemudian mikrokontroler akan memberikan respon berupa output untuk menggerakkan tirai blinds dan mengatur arus lampu untuk penerangan ruangan, serta menampilkan nilai intensitas penerangan pada modul LCD 16x2.
Pada perancangan sistem ini menggunakan komponen-komponen yaitu:
2.1. Modul Sensor PIR
Sensor Passive Infrared Receiver (PIR) adalah sensor infrared yang memiliki fungsi untuk melakukan deteksi keberadaan manusia. Sensor tersebut disebut passive infrared karena merupakan sensor yang tidak memancarkan energi untuk menerima pancaran sinyal infrared yang berasal dari tubuh manusia. Sersor PIR memiliki sudut deteksi hingga 60°.
2.2. Modul Sensor LDR
Sensor cahaya LDR (Light Dependent Resistant) merupakan suatu jenis resistor yang peka terhadap cahaya. Nilai resistansi LDR akan berubah-ubah sesuai dengan intensitas cahaya yang diterima. Jika LDR tidak terkena cahaya nilai maka nilai tahanan akan menjadi besar (sekitar 10MΩ) dan jika terkena cahaya nilai tahanan akan menjadi kecil (sekitar 1kΩ).
2.3. Modul Dimmer Lampu Pijar
Dimmer adalah alat kontrol yang dapat memberikan tingkat cahaya lampu dan daya lampu yang bervariasi [1]. Komponen utama pada modul dimmer lampu pijar terdiri dari resistor, kapasitor, diac dan triac [2]. Prinsip kerja dimmer yaitu dengan melakukan pemotongan terhadap tegangan AC yang berbentuk gelombang sinus.
2.4. Motor Servo
Motor Servo adalah sebuah motor DC kecil yang diberi sistem gear dan potensiometer sehingga dia dapat menempatkan “horn” servo pada posisi yang dikehendaki [3]. Setiap motor servor memiliki 3 buah kabel yaitu kabel power (VCC), ground (GND) dan kontrol (PWM). Secara
umum terdapat 2 jenis motor servo, yaitu motor servo standar dan motor servo kontinu. Motor servo standar adalah jenis motor servo yang hanya mampu bergerak sebesar 180°(90° CW dan 90° CCW).
2.5. Modul LCD
LCD Alfanumerik (Liquid Crystal Display) adalah perangkat output untuk menampilkan informasi teks [4]. LCD Alfanumerik memikili ukuran yang beragam, seperti 8x1, 16x2, 20x4, 32x4, 40x4. Kode tersebut menyatakan jumlah karakter yang dapat dimunculkan oleh LCD Alfanumerik. Sebagai contoh, 16x2 menyatakan 16 karakter dan 2 baris, sehingga dapat menampilkan 32 buah karakter.
2.6. Mikrokontroler
Mikrokontroler adalah IC yang dapat diprogram berulang kali, baik ditulis atau dihapus [5]. Mikrokontroler ATMega16 merupakan seri mikrokontroler CMOS 8-bit buatan Atmel yang berbasis arsitektur RISC (Reduced Instruction Set Computer) [6]. Mikrokontroler dapat dikategorikan juga sebagai mikroprosesor yang lebih efisien dan lebih murah biayanya.
2.7. Logika Fuzzy
Logika fuzzy yang digunakan dalam sistem ini menggunakan perancangan logika fuzzy yang dibuat oleh Netika Purwaningrum. Metode logika fuzzy yang digunakan adalah metode Mamdani yang terdiri dari 4 tahapan yaitu [6] :
a. Fuzzifikasi
Fuzzifikasi adalah proses mengubah suatu satuan masukan dari bentuk tegas (crisp) menjadi fuzzy (variabel linguistik). Proses ini secara umum dijalankan dalam bentuk himpunan-himpunan fuzzy dengan suatu fungsi keanggotaan yang berbeda. Fungsi keanggotaan yang digunakan dalam perancangan logika fuzzy menggunakan fungsi keanggotaan segitiga dan fungsi keanggotaan trapesium.
a.1. Fungsi Keanggotaan Segitiga
Fungsi keanggotaan segitiga berasal dari representasi kurva segitiga. Kurva segitiga merupakan gabungan antara dua garis (linear) dan bentuk kurva tersebut dapat dilihat pada Gambar 1. Fungsi keanggotaan segitiga diperoleh dari persamaan :
Gambar 1 Representasi Fungsi Segitiga
Sumber : Netika Purwaningrum, Aplikasi Fuzzy Logic untuk Pengendalian Penerangan Ruangan Berbasis Mikrokontroler ATMega8535, (Semarang: Teknik Elektro Fakultas Teknik Universitas
Semarang, 2007), h. 24 a.2. Fungsi Keanggotaan Trapesium
Fungsi keanggotaan trapesium berasal dari representasi kurva trapesium. Kurva trapesium merupakan bentuk segitiga yang pada beberapa titiknya memiliki nilai keanggotaan 1. Bentuk kurva tersebut dapat dilihat pada Gambar 2. Fungsi keanggotaan trapesium diperoleh dari persamaan :
Gambar 2 Representasi Fungsi Trapesium
Sumber : Netika Purwaningrum, Aplikasi Fuzzy Logic untuk Pengendalian Penerangan Ruangan Berbasis Mikrokontroler ATMega8535, (Semarang: Teknik Elektro Fakultas Teknik Universitas
Semarang, 2007), h. 24 b. Aplikasi fungsi implikasi (basis aturan)
Aplikasi fungsi implikasi (basis aturan) berisi aturan-aturan fuzzy yang digunakan untuk pengendalian sistem. Aturan-aturan ini dibuat berdasarkan logika manusia, serta berkaitan erat dengan jalan pikiran dan pengalaman pribadi. Sehingga aturan ini bersifat subjektif, tergantung dari pembuatnya. Aturan yang telah ditetapkan digunakan untuk menghubungkan antara input dan output sehingga berbentuk ‘JIKA – MAKA’ (IF…THEN)
c. Komposisi aturan menggunakan operator OR (union) Fungsi keanggotaan dari gabungan 2 buah himpunan fuzzy A dan B ( AUB), dapat dinyatakan
sebagai : ;
untuk semua u U
d. Defuzzikasi menggunakan metode Centroid
Metode centroid juga dikenal sebagai metode COA (Center of Area) atau metode COG (Center of Gravity). Pada metode ini diperoleh output berupa nilai tegas berdasarkan titik berat dari kurva hasil proses pengambilan keputusan (inference).
3. Rancangan dan Realisasi
3.1. Rancangan a. Perangkat Keras
Modul mikrokontroler berfungsi untuk menerima input lalu mengolah input tersebut sehingga dapat memberikan output kembali pada perangkat keras berdasarkan program yang telah dibuat di dalam mikrokontroler. Input yang diterima oleh mikrokontroler berasal dari sensor infrared dan sensor cahaya LDR yang ada pada maket. Sedangkan output yang akan dihasilkan oleh mikrokontroler berupa pergerakan motor dan dimmer lampu pijar. Input dan output tersebut dihubungkan pada modul mikrokontroler seperti yang terlihat pada Gambar 3.
Gambar 3 Susunan Pemasangan Input dan Output Pada Modul
Sensor PIR yang digunakan diletakkan pada bagian langit-langit maket ruangan untuk mendeteksi keberadaan manusia dalam ruangan. Sensor PIR berfungsi mendeteksi keberadaan manusia dalam ruangan, untuk mengaktifkan dan mengnonaktifkan sistem. Modul ini akan menampilkan kondisi input dan output yang dijalankan sistem. Modul ini akan dipasang pada bagian atas maket ruangan. Motor servo jenis standar digunakan untuk menggerakkan blinds pada tirai blinds. Pergerakkan blinds tersebut diatur menjadi 5 tahap untuk memaksimalkan penerangan dalam ruangan menggunakan cahaya dari luar ruangan. Modul dimmer yang digunakan untuk mengontrol arus yang mengalir ke lampu pijar. Modul tersebut dapat mengatur kecerahan lampu sesuai dengan aturan yang telah dibuat. Sensor cahaya yang digunakan dalam sistem berjumlah 2 buah dan diletakkan pada 2 posisi yaitu 1 buah sensor cahaya diletakkan pada bagian dalam tirai blinds untuk dan 1 buah sensor cahaya diletakkan pada meja kecil yang ada dalam ruangan. Sensor cahaya yang diletakkan pada bagian dalam tirai blinds berfungsi untuk mendeteksi intensitas cahaya dari luar ruangan yang masuk ke dalam ruangan. Sensor cahaya yang diletakkan pada meja kecil memiliki 2 fungsi yaitu untuk mendeteksi intensitas penerangan yang ada dalam ruangan dan memberikan input umpan balik ke sistem agar mencapai tingkat intensitas penerangan yang ingin dicapai. Keseluruhan komponen perangkat keras akan dipasang pada maket ruang tunggal yang terbuat dari kayu triplek dengan ukuran 400 mm x 400 mm x 400 mm. Pada sisi depan akan dipasang tirai blinds dengan ukuran yang sama. Pada bagian langit-langit maket akan dipasang lampu pijar sebagai penerang dalam ruangan. Bentuk dari maket tersebut dapat dilihat pada Gambar 4.
Gambar 4 Maket Ruang Tunggal dan Tirai Blinds
b. Perangkat Lunak
Rancangan logika fuzzy yang dibuat memiliki 2 buah input yaitu input dari sensor cahaya yang terletak pada meja kecil di dalam ruangan untuk mendeteksi
intensitas cahaya dalam ruangan dan input dari sensor cahaya yang terletak di bagian belakang tirai blinds untuk mendeteksi intensitas cahaya yang bersumber dari luar ruangan. Masing-masing input sensor cahaya tersebut merupakan nilai crisp yang berasal dari hasil konversi input sensor cahaya ke ADC ATMega16 dengan jumlah 8 bit (0-255). Nilai tersebut yang akan difuzzifikasi menjadi himpunan fuzzy dengan nilai Gelap, Agak Gelap, Remang-remang, Agak Terang dan Terang dengan fungsi keanggotaan segitiga. Fungsi keanggotaan dengan 5 variabel dari input sensor cahaya dapat dilihat pada Gambar 5.
Gambar 5 Fungsi Keanggotaan Input Sensor Cahaya
Output yang diinginkan merupakan pengendalian terhadap tirai blinds dan kuat arus lampu. Output untuk arus lampu menggunakan fungsi keanggotaan trapesium. Output untuk arus lampu memiliki skala nilai 0-300 yang merepresentasikan nilai lux yang ingin dicapai. Output tersebut terbagi menjadi 5 variabel himpunan fuzzy yaitu Padam, Sangat Redup, Redup, Agak Terang, dan Terang. Fungsi keanggotaan output arus lampu dapat dilihat pada Gambar 6. Sedangkan output untuk posisi tirai blinds menggunakan fungsi keanggotaan segitiga. Output untuk blinds memiliki skala nilai 0-90 yang merepresentasikan sudut blinds yang ingin dicapai. Fungsi keanggotaan untuk output tirai blinds dapat dilihat pada Gambar 7. Basis aturan yang dibuat untuk sistem tersebut dapat dilihat pada
Tabel 1.
Gambar 7 Fungsi Keanggotaan Output Tirai Blinds
Tabel 1 Basis Aturan Logika Fuzzy yang Dirancang
Luar Gelap Agak Gelap Remang- remang Agak Terang Terang Dalam Gelap
Lampu Terang Terang Agak
Terang Redup Redup
Tirai Tutup Buka
100% Buka 100% Buka 100% Buka 100% Agak Gelap
Lampu Terang Terang Redup Padam Padam
Tirai Tutup Buka
100% Buka 100% Buka 100% Buka 90% Ramang- remang
Lampu Terang Terang Redup Padam Padam
Tirai Tutup Buka
100% Buka 100% Buka 90% Buka 80% Agak Terang
Lampu Terang Agak
Terang Redup Padam Padam
Tirai Tutup Buka
100% Buka 90% Buka 80% Buka 70% Terang
Lampu Terang Agak
Terang
Sangat
Redup Padam Padam
Tirai Tutup Buka
100% Buka 80% Buka 70% Buka 60% 3.2. Realisasi a. Mikrokontroler
Modul mikrokontroler yang digunakan terdiri dari e-board AVR8353 produksi Creative Vision yang merupakan sistem minimum untuk mikrokontroler AVR dengan jumlah pin 40 dan mikrokontroler ATMega16 yang diproduksi oleh Atmel. Modul tersebut dimodifikasi pada bagian input power. Slot power yang awalnya menggunakan screw terminal diganti menjadi power jack tipe male. Modifikasi ini dilakukan untuk mempermudah pemasangan catu daya yang berasal dari adaptor 9V. Modul sistem minimum tersebut berfungsi untuk mengontrol keseluruhan sistem penerangan yang akan dibuat dengan menggunakan bahasa pemrograman Assembler. Mikrokontroler tersebut menerima input dari sensor PIR dan sensor cahaya. Kemudian mikrokontroler
memberikan output berupa pengaturan kuat arus, pengaturan perputaran motor servo dan informasi intensitas penerangan yang ditampilkan pada LCD. Rincian penggunaan kaki-kaki pin pada mikrokontroler dapat dilihat pada Tabel 2. Modul sistem minimum mikrokontroler sudah digunakan dapat dilihat pada
Gambar 8.
Tabel 2 Tabel Rincian Koneksi Kaki Pin Mikrokontroler
Nama Kaki Pin Perangkat Keras
PA0 Sensor Cahaya 1
PA1 Sensor Cahaya 2
PB0 Sensor Pir
PC0-PC5 Modul LCD 16x2
PB7 Motor Servo
PD1 Dimmer Lampu
Gambar 8 Modul Sistem Minimum ATMega16
b. Realisasi Sensor PIR
Sensor PIR digunakan untuk mendeteksi keberadaan manusia yang digunakan sebagai pengaktif sistem. Modul sensor PIR tersebut diletakkan pada bagian kiri ruangan dan menghadap ke bawah, agar dapat berfungsi secara optimal. Sensor PIR akan selalu aktif saat sistem minimum diaktifkan. Gambar realisasi modul sensor PIR dapat dilihat pada Gambar 9.
Gambar 9 Realisasi Sensor PIR
c. Realisasi Modul LCD Alfanumerik 16x2
Modul LCD alfanumerik 16x2 yang digunakan adalah modul LCD keluaran Depok Instrumen yang dapat menampilkan 16 karakter sebanyak 2 baris. Modul LCD tersebut berfungsi untuk menampilkan
nilai intensitas penerangan dalam ruangan dengan satuan lux. Modul LCD tersebut diletakkan pada bagian atas maket. Gambar realisasi modul LCD alfanumerik 16x2 dapat dilihat pada Gambar 10.
Gambar 10 Realisasi Modul LCD Alfanumerik 16x2
d. Realisasi Motor Servo
Motor servo yang digunakan merupakan motor servo jenis standar (180°) keluaran GWS. Motor servo berfungsi untuk menggerakan tirai sehingga dapat terbuka dan tertutup sesuai sudut yang telah ditentukan. Motor servo disambung dengan besi pengontrol tirai yang terdapat pada bagian atas tirai. Realisasi motor servo dapat dilihat pada Gambar 11.
Gambar 11 Realisasi Motor Servo
e. Realisasi Modul Dimmer Lampu Pijar
Modul dimmer lampu pijar yang digunakan berfungsi untuk mengatur kuat arus yang dialirkan ke lampu. Modul dimmer tersebut dibuat hingga dapat mengatur kuat arus hingga 256 tahap. Mulai dari padam (tidak nyala) hingga nyala terang. Modul dimmer diletakkan pada bagian langit-langit maket. Realisasi modul dimmer lampu pijar dapat dilihat pada
Gambar 12.
Gambar 12 Realisasi Modul Dimmer Lampu Pijar
f. Realisasi Sensor Cahaya (LDR)
Sensor cahaya yang digunakan sebanyak 2 buah. Masing-masing sensor cahaya tersebut memiliki fungsi yang berbeda. Sensor cahaya 1 diletakkan berdekatan dengan tirai untuk menerima intensitas cahaya yang datang dari luar (cahaya matahari). Sedangkan sensor cahaya 2 diletakkan pada bagian tengan ruangan untuk mendeteksi intensitas penerangan ruangan dan memberikan input umpan balik kepada sistem. Keduanya merupakan input untuk pemrosesan logika fuzzy agar dapat menentukan output yang akan dihasilkan. Realisasi sensor cahaya dilihat pada
Gambar 13.
Gambar 13 Realisasi Sensor Cahaya
g. Realisasi Maket Ruang Tunggal dan Tirai Blinds Maket ruangan yang digunakan merupakan maket dalam bentuk kubus sebagai simulasi ruangan. Maket tersbut terbuat dari papan triplek dan digabungkan menggunakan siku besi. Maket tersebut dilengkapi dengan tirai blinds yang dipasang pada bagian depan maket. Realisasi maket ruang dan tirai blinds dapat dilihat pada Gambar 14.
Gambar 14 Realisasi Maket Ruang Tunggal dan Tirai Blinds
h. Realisasi Perangkat Lunak
Perangkat lunak sistem penerangan otomatis berdasarkan intensitas cahaya dibuat dengan menggunakan bahasa pemrograman Assembler. Perangkat lunak yang tersebut dimasukkan ke dalam mikrokontroler untuk dijalankan. Mikrokontroler akan menunggu input dari sensor PIR untuk mengaktifkan seluruh sistem. Setelah sistem aktif, maka mikrokontroler akan menerima input dari sensor
cahaya 1 dan sensor cahaya 2. Input tersebut kemudian diproses dan akan menghasilkan output untuk menggerakan motor, mengatur arus lampu dan menampilkan nilai intensitas penerangan.
4. Hasil Percobaan
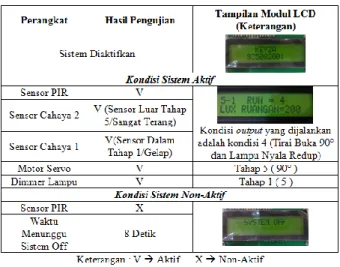
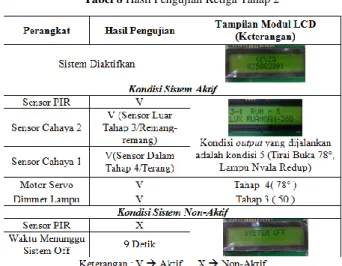
Pengujian keseluruhan sistem dilakukan sebanyak 6 kali. Pengujian tahap 1 dilakukan di ruangan kamar kos, sedangkan pengujian tahap 2 dikalukan di ruangan Robot Cerdas Universitas Tarumanagara. Masing-maisng tahap dilakukan pengujian sebanyak 3 kali. Pengujian pertama dilakukan dengan memberikan cahaya terang pada sensor cahaya luar, pengujian kedua dilakukan dengan menutup sensor cahaya luar, dan pengujian ketiga dilakukan dengan memberikan cahaya remang-remang pada sensor cahaya luar. Hasil pengujian dapat dilihat pada Tabel 3-8.
Tabel 3 Hasil Pengujian Pertama Tahap 1
Tabel 4 Hasil Pengujian Kedua Tahap 1
Tabel 5 Hasil Pengujian Ketiga Tahap 1
Tabel 6 Hasil Pengujian Pertama Tahap 2
Tabel 8 Hasil Pengujian Ketiga Tahap 2
Analisa Hasil Pengujian
Setelah pengujian dilakukan maka diketahui bahwa sistem penerangan otomatis ruangan berjendela dapat bekerja dengan baik. Sistem dapat menggerakkan tirai dan mengatur arus yang dialirkan ke lampu berdasarkan kondisi cahaya dari luar dan dalam ruangan. Konsep logika fuzzy yang digunakan dapat menghasilkan kondisi output sesuai dengan aturan yang telah dibuat. Fungsi keanggotaan yang digunakan untuk input dari sensor cahaya (LDR) adalah fungsi keanggotaan segitiga dengan 5 variabel, untuk output pada tirai adalah fungsi keanggotaan segitiga dengan 6 variabel sedangkan untuk output pada lampu adalah fungsi keanggotaan trapesium dengan 5 variabel.
Dari beberapa kali pengujian yang dilakukan di kamar kos dan di Laboratorium Robot Cerdas Untar, kondisi output yang sering muncul saat kondisi pencahayaan yang digunakan terang adalah kondisi 4 dan kondisi 10. Untuk kondisi ruangan yang agak terang dan remang-remang, kondisi output yang sering muncul adalah kondisi 4 dan kondisi 6. Untuk kondisi ruangan yang gelap, kondisi output yang sering muncul adalah kondisi 1 dan kondisi 2. Kondisi output dapat dilihat pada Tabel 9.
Kekurangan dari sistem ini adalah kondisi output yang tidak stabil pada saat kondisi penerangan remang-remang. Hal ini disebabkan karena sistem penerangan tersebut bersifat auto looping sehingga sensor selalu mendeteksi, mengolah hasil deteksi dan menghasilkan kondisi output yang baru. Maka ketika sensor mendeteksi adanya perbedaan cahaya yang diterima maka akan terjadi perubahan pada output sistem. Kondisi output akan menjadi stabil saat pencahayaan yang diterimanya sudah stabil (terang atau gelap). Selain itu, sistem memerlukan
waktu tunda yang lebih lama untuk menghasilkan kondisi output. Waktu selah antara pergantian kondisi output sekitar 7 detik. Sistem berhenti bekerja setelah 5 detik proses pendeteksian sensor PIR telah stabil. Maka tirai tertutup dan lampu mati dan layar LCD akan menampilkan kondisi “System Off”.
Tabel 9 Kondisi Output Sistem
5. Kesimpulan
Kesimpulan yang dapat diambil setelah dilakukan pengujian di ruangan kamar kos dan ruangan Robot Cerdas FTI Universitas Tarumanagara adalah sebagai berikut : 1. Kondisi output yang sering muncul pada kondisi terang
adalah kondisi 7, 8, dan 9. Kondisi output yang sering muncul pada kondisi agak terang adalah kondisi 4 dan 6. Kondisi output yang sering muncul pada kondisi gelap adalah kondisi 1 dan 2.
2. Sistem berhasil memberikan kondisi output yang stabil pada saat kondisi pencahayaan luar stabil ( terang atau gelap ). Sedangkan pada kondisi remang-remang, sistem cenderung menjadi tidak stabil ( kondisi output yang selalu berubah / tidak berhenti pada satu kondisi output ).
3. Waktu untuk meng-nonaktfikan sistem secara otomatis yaitu 5 detik setelah sensor PIR tidak mendekteksi keberadaan manusia. Namun dikarenakan perlu ada waktu untuk menunggu kondisi sensor PIR menjadi
stabil, maka sistem akan nonaktif pada kisaran waktu 7-10 detik.
REFERENSI
[1] Karlen, Mark dan Benya, James (2008), Dasar-dasar Desain Penerangan, terjemahan oleh Diana Rumagit, Jakarta: Penerbit Erlangga
[2] TrenSains.com (2008), Lamp Dimmer Sircuit, http://trensains.com/dimmer.htm
[3] Malik, Moh. Ibnu dan Juwana, Moh. Unggul (2009), Aneka Proyek Mikrokontroler PIC16F84/A, Jakarta: PT.Elex Media Komputindo
[4] F.Barrett, Steven dan J.Pack, Daniel. (2007), Atmel AVR Microcontroller Primer: Programming and Interfacing, San Rafael: Morgan & Claypool Publishers
[5] Bejo, Agus (2008), C & AVR Rahasia Kemudahan Bahasa C dalam Mikrokontroller ATMega 8535, Yogyakarta: Graha Ilmu.
[6] Atmel (2010), ATmega16/ATmega16(L)Datasheet, www.atmel.com/Images/ doc2466.pdf
[7] Purwaningrum, Netika (2007), Aplikasi Fuzzy Logic untuk Pengendalian Penerangan Ruangan Berbasis Mikrokontroler ATMega8535, Semarang: Teknik Elektro Fakultas Teknik Universitas Semarang
Keyza Novianti, memperoleh gelar S.Kom. dari