3.3.3 Perancangan dan Pembuatan Rangkaian Mekanis
Rangkaian mekanik berfungsi untuk menunjang mekanisme gerak vertikal. Pada platform yang akan dibuat pembuatan rangkaian ini menggunakan komponen mekanik berupa ban karet dengan menggunakan sistem pulley, guidance lintasan, toggle switch dan motor DC sebagai penggerak.
3.3.2 Perancangan dan Pembuatan Rangkaian Gerak Elektronik
Rangkaian gerak mekanis yang telah dibuat perlu dikontrol sengan sistem kontrol elektronik, untuk itu dilakukan perancangan. dan pembuatan rangkaian elektronik yang akan digunakan sesuai dengan spesifikasi platform yang akan dibuat. Spesifikasi platform yang diutamakan antara lain kemampuan mengangkut beban, perubahan arah gerak, dan jeda gerak di beberapa ketinggian. Kemudian rangkaian yang akan dibuat dibagi menjadi beberapa bagian yaitu :
• H-bridge, dibuat dengan menggunakan power transistor jenis NPN dan PNP (gambar). Dengan penambahan resistor pada basis transistor sebagai gerbang logic yang diterima dari rangkaian kontrol logic pembalik arah.
• Rangkaian kontrol logic pembalik arah, dibuat dengan menggunakan IC switch 4066, IC counter dan monostable untuk menyuplai logic ke rangkaian h-bridge. • Rangkaian elektronik penjeda waktu,
dibuat menggunakan monostable dengan trigger yang diparalel pada trigger kontrol logic pembalik arah, pembuatan rangkaian elektronik penjeda waktu ini bertujuan untuk menghentikan motor sebelum berbalik arah sehingga kerusakan gearbox akibat perpindahan arah putar motor DC tanpa adanya jeda waktu dapat dihindari.
• Rangkaian elektronik penjeda gerak platform dibuat dengan mengadopsi sistem counter pada anemometer menggunakan magnet, hall sensor, IC counter 4020 dan monostable.
3.3.4 Pemasangan Sistem Telemetri dan Rangkaian Sensor
Sistem telemetri dan rangkaian sensor yang dipasang pada platform adalah sistem logging dan pengukuran data berbasis telemetri yang telah di kembangkan oleh laboratorium instrumentasi meteorologi departemen GFM. Sistem telemetri tersebut mampu mengirimkan satu data setiap menit ke perangkat receiver. Perangkat data logger yang dipakai pada penelitian ini adalah seperangkat komputer notebook yang telah dihubungkan dengan interface receiver dan telah dilengkapi dengan perangkat lunak event logger.
IV. HASIL DAN PEMBAHASAN 4.1 Rangkaian gerak mekanis
Platform membutuhkan suatu sistem gerak mekanis agar dapat bergerak vertikal pada lintasan. Dibutuhkan suatu mekanisme gerak mekanis yang dapat digerakkan oleh motor DC. Perancangan mekanisme tersebut menggunakan sistem pulley yang berupa ban karet yang telah diberi alur dengan guidance sebagai penyelaras lintasan.
4.1.1 Pulley
Selama masa penelitian dalam perancangan platform telah ujicoba berbagai macam pulley sebagai mekanisme gerak vertikal. Mekanisme yang pertama kali dipakai adalah mekanisme pulley A (gambar 9). Mekanisme pulley A dirancang menggunakan dua buah motor DC untuk menggerakkan dua buah roda karet identik, pada mekanisme ini lintasan dipasang di antara roda karet dengan motor DC yang saling bergerak berlawanan agar lintasan dapat bergerak diantara roda karet.
Setelah diujicoba ternyata gerak platform cenderung lambat akibat lintasan terjepit karena posisi roda yang terlalu rapat. Setelah dirancang ulang dengan merenggangkan posisi roda, ternyata lintasan cenderung selip karena permukaan gesek yang berkurang sehingga platform tidak dapat bergerak naik. Kelemahan lainnya dari mekanisme ini adalah konsumsi energi yang boros akibat penggunaan 2 buah motor DC secara simultan. Kemudian dilakukan perancangan ulang dengan menggunakan mekanisme pulley B (gambar 10) sebagai solusi dari kelemahan sistem pulley mekanisme A.
Gambar 10 Mekanisme pulley B
Pada mekanisme pulley B hanya digunakan satu buah motor DC yang menggerakkan roda karet dengan penambahan guidance untuk menjepit lintasan agar bergesekan dengan roda karet. Guidance yang dipakai pada mekanisme pulley B dibuat dari bearing kecil yang dipasang di tiga titik disamping roda. Setelah diujicoba ternyata roda karet tidak bergerak dengan baik karena cenderung selip akibat luas permukaan gesek antara roda dan lintasan yang kecil, hal ini diperburuk dengan kejadian lepasnya lintasan dari alur roda karet karena lintasan terlalu bebas bergerak akibat guidance bearing yang terlalu licin sehingga mekanisme panjat menjadi tidak efektif. Dari kedua kegagalan perancangan mekanisme pulley tersebut diketahui kriteria yang tepat dalam perancangan pulley berikutnya, yaitu harus memiliki luas permukaan gesek yang besar dan lintasan tidak boleh terjepit. Dari kriteria tersebut dilakukan perancangan mekanisme pulley yang baru yaitu mekanisme pulley C (gambar 11).
Gambar 11 Mekanisme pulley C
Pada mekanisme C permukaan gesek antara lintasan dan roda karet diperbesar dengan cara melilitkan lintasan pada satu roda karet sehingga luas permukaan gesek menjadi besar dan lintasan tidak terjepit, sehingga diharapkan roda dapat bergerak secara efisien pada lintasan . Dari hasil ujicoba platform dengan mekanisme gerak pulley C dapat bergerak secara efisien pada lintasan tanpa selip serta energi yang dibutuhkan lebih efisien karena hanya menggunakan satu motor DC sebagai penggerak, sehingga mekanisme C adalah mekanisme yang akhirnya digunakan sebagai mekanisme panjat platform.
4.2 Rangkaian gerak elektronik 4.2.1 H-bridge
Dalam proses pembuatan h-bridge perlu diperhatikan kebutuhan arus pada motor DC yang akan digunakan sebagai penggerak platform sehingga platform dapat bergerak optimal dan mengangkut beban sesuai dengan yang diharapkan. Platform ini diharapkan mampu mengangkut beban seberat 1kg, sedangkan motor DC yang digunakan mempunyai kemampuan torsi 3.5kg/cm, dari hasil pengujian diketahui nilai arus optimal yang dibutuhkan motor DC untuk mengangkut beban sebesar 1kg adalah 200mA dengan tegangan 12V. Setiap jenis transistor mempunyai nilai hfe yang berbeda-beda, hfe adalah penguat arus DC pada keadaan stasioner , pada h-bridge yang dibuat untuk platform ini digunakan transistor power PNP dan NPN yang mempunyai nilai hfe sebesar 60, dengan penambahan resistor 4KΩ pada basis yang mendapat sinyal logic dari rangkaian kontrol logic pembalik arah. H-bridge dapat dibuat dengan berbagai macam jenis transistor power selama transistor power yang dipakai dapat memenuhi kebutuhan arus
dan tegangan optimal yang dibutuhkan sesuai spesifikasi h-bridge yang akan dibuat. Sedangkan pemakaian resistor sebesar 4KΩ bertujuan untuk menjenuhkan transistor dengan nilai hfe 60 sehingga kebutuhan arus optimal yang diperlukan motor DC sebesar 200mA pada tegangan 12V dapat dipenuhi. Diketahui dengan rumus
...(1) ...(2) Keterangan :
Gambar 12 Transistor sebagai saklar
Transistor pada h-bridge dapat terbakar akibat ketidaksesuaian status dimana keempat transistor yang diposisikan sebagai saklar berada dalam status “aktif” (shoot through), sehingga digunakan kombinasi transistor PNP dan NPN dengan tujuan transistor yang berfungsi sebagai saklar aktif secara berpasangan saat mendapat sinyal logic high maupun low agar transistor tidak terbakar karena shoot trough. Mengingat karakteristik transistor PNP yang membutuhkan logic low untuk aktif, sedangkan transistor NPN membutuhkan logic high untuk aktif.
Gambar 13 Aliran arus h-bridge
4.2.2 Kontrol Logic Pembalik Arah Rangkaian kontrol logic pembalik arah berfungsi untuk membalik sinyal logic yang dialirkan ke basis transistor pada h-bridge sehingga putaran motor DC berbalik arah, mekanisme motor DC berbalik arah ini akan terjadi pada saat platform telah berada diujung lintasan atau dipuncak lintasan sehingga motor DC akan bergerak turun dan akan berbalik arah kembali ketika mencapai awal lintasan atau pangkal lintasan tersebut. Pada awal penelitian rangkaian ini direncanakan menggunakan IC 4069UB hex inverter yang mengubah sinyal low menjadi high maupun sebaliknya. Namun karena IC 4069UB tidak tersedia maka pembuatan kontrol logic pembalik arah disubstitusi dengan menggunakan IC 4066 dengan susunan rangkaian sebagai berikut
Gambar 14 Rangkaian kontrol logic pembalik arah
Pada rangkaian kontrol logic pembalik arah, sinyal logic akan dirubah oleh rangkaian switch, sehingga output sinyal pada titik A dan titik B akan selalu berlawanan dan motor DC akan berbalik arah ketika mendapat trigger dari monostable. Namun perpindahan arah gerak motor DC terjadi secara langsung tanpa jeda sehingga gigi reduksi pada motor DC rawan mengalami kerusakan, oleh karena itu untuk melindungi motor DC dari kerusakan gigi reduksi akibat perpindahan arah putar secara langsung maka rangkaian kontrol logic pembalik arah diparalel dengan rangkaian monostable pemutus tegangan pada motor DC dengan waktu jeda 2 detik. Sehingga motor DC akan berhenti terlebih dahulu selama 2 detik sebelum akhirnya bergerak kembali.
Gambar 15 Rangkaian monostable pemutus tegangan
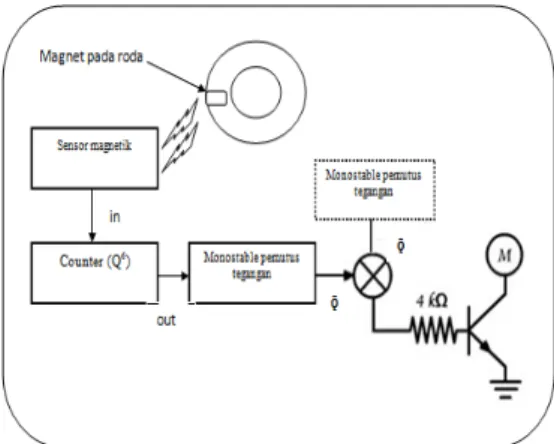
4.2.3 Penjeda Gerak Platform
Penjeda gerak platform berfungsi untuk menghentikan gerak platform dibeberapa ketinggian tertentu. Prinsip kerja dari rangkaian ini menggunakan sinyal yang diperoleh dari hall sensor dan IC counter yang mendapat input dari jumlah putaran magnet pada roda. Kemudian IC counter mengirimkan sinyal trigger sehingga IC monostable pemutus tegangan aktif dan platform berhenti. Jarak jeda platform ditentukan oleh nilai bit yang dipakai pada counter, sedangkan lama waktu jeda hingga platform bergerak kembali ditentukan oleh kombinasi nilai resistor dan kapasitor yang digunakan pada monostable pemutus tegangan yang mengontrol switch.
Gambar 16 Rangkaian penjeda gerak
Pada gambar diatas terlihat bahwa monostable pemutus tegangan mengontrol switch yang memberikan logic pada transistor, transistor ini berfungsi memutus tegangan yang diperlukan motor DC sehingga motor DC berhenti. Pada basis transistor tersebut harus diberikan jumlah resistansi yang sama dengan transistor pada h-bridge pengontrol motor DC karena transistor tersebut berhubungan langsung dengan rangkaian h-bridge sehingga tidak mengganggu jumlah arus yang disediakan oleh h-bridge untuk motor DC. Kemudian pada platform ini digunakan roda berdiameter 4 cm dan nilai bit 26 pada IC counter serta kombinasi nilai resistor 200MΩ dan kapasitor 1µF, sehingga platform akan berhenti setiap mencapai jarak 8meter selama 8,2 menit ketika jumlah putaran roda mencapai 64 kali. Diketahui dengan rumus : 4 ...(3) 6 2.48 ...(4) Ke erangan :t 3.14
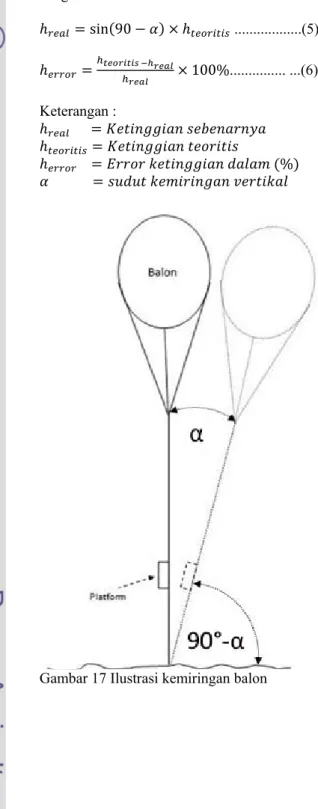
Nilai jarak dan t-jeda dapat disesuaikan dengan kebutuhan pengamatan pada ketinggian yang berbeda-beda. Ketinggian yang telah dicapai oleh platform ini diperoleh dengan asumsi lintasan platform tegak lurus dengan permukaan, namun pada kondisi sebenarnya terdapat pengaruh angin yang mengakibatkan balon menjadi miring searah arah angin sehingga lintasan akan miring, maka ketinggian sebenarnya yang telah ditempuh platform menjadi tidak tepat sehingga perlu dikoreksi dengan fungsi sudut.
4.3 Sensor Sebagai contoh jika ketinggian teoritis yang
telah ditempuh oleh platform adalah 10meter dengan sudut kemiringan vertikal balon sebesar 15° dengan simpangan baku perubahan sudut sebesar 15° 0,71 , maka ketinggian sebenarnya yang telah ditempuh platform adalah 9,63meter dengan persentase error sebesar 3,7%. Diketahui
enga
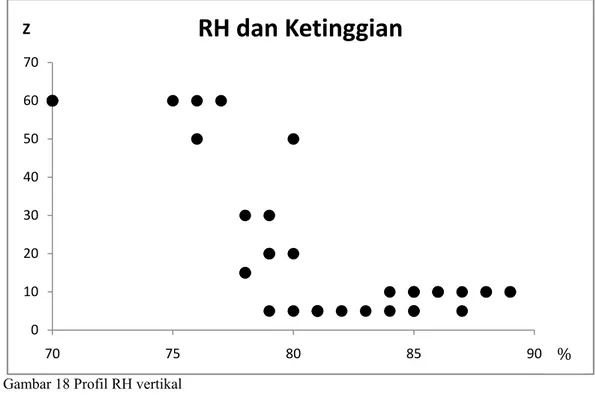
Sebelum proses pembuatan platform selesai, dilakukan pengujian sensor yang dipakai sebagai alat pengukuran yaitu sensor RH dan sensor suhu. Ujicoba sensor ini dilakukan untuk mempersiapkan sensor yang nantinya akan dipasang pada platform. Sensor tersebut telah dirangkai sedemikian rupa pada rangkaian transmitter telemetri oleh laboratorium Instrumentasi Meteorologi Departemen Geofisika dan Meteorologi. Dengan kemampuan pengiriman sebanyak satu data per menit. Pengiriman data oleh telemetri yang dirangkai dengan sensor tersebut telah diujicoba baik secara horizontal maupun vertikal. Secara horizontal pengiriman data diujicoba dengan cara menempatkan sensor dan transmitter secara berjauhan dengan receiver, dari hasil ujicoba diketahui bahwa data dapat diterima oleh receiver tanpa gangguan hingga jarak maksimal 100meter. Kemudian ujicoba secara vertikal dilakukan dengan memasang sensor dan transmitter pada rangkaian balon gas berukuran sedang sebanyak 200 buah yang dibungkus dengan trashbag, pembungkusan dengan trashbag bertujuan untuk menahan gas jika terjadi kebocoran gas pada balon atau jika balon tersebut pecah. Ujicoba vertikal dilakukan di atas gedung OFAC B11. Sensor yang telah dirangkai dengan transmitter diterbangkan dengan balon ukuran sedang sebanyak 200 buah pada ketinggian maksimal-60meter, ketinggian pengukuran maksimal 60meter ini disebabkan keterbatasan daya angkat balon yang hanya mencapai 60meter. Namun dengan hasil ujicoba secara horizontal dapat diasumsikan bahwa data hasil pengukuran akan dapat diterima oleh receiver secara vertikal pada ketinggian 100meter mengingat kondisi pengukuran menggunakan balon secara vertikal yang bebas penghalang. Ujicoba vertikal menggunakan balon di beberapa ketinggian tersebut menghasilkan profil RH dan profil suhu sebagai berikut :
d n rumus : sin 90 ...(5) 100%... ...(6) eterang K an : %
Gambar 18 Profil RH vertikal 0 10 20 30 40 50 60 70 70 75 80 85 90
RH
dan
Ketinggian
Z %Gambar 19 Profil suhu vertikal
0 10 20 30 40 50 60 70 20.0 22.0 24.0 26.0 28.0 30.0
Suhu
dan
Ketinggian
4.3 Platform
Secara keseluruhan platform mempunyai prinsip kerja sebagai berikut : • Bergerak vertikal pada lintasan.
• Ketika jumlah putaran roda telah mencapai 64 kali maka platform akan berhenti.
• Saat berhenti pada ketinggian tertentu platform akan memberi waktu kepada sensor untuk mengukur data dan mengirimkan data ke-receiver melalui transmitter telemetri.
• Saat mencapai puncak lintasan, rangkaian kontrol logic pembalik arah dan monostable pemutus tegangan akan aktif sehingga platform akan berhenti selama 2 detik sebelum bergerak turun.
• Saat bergerak turun, platform akan kembali berhenti di ketinggian tertentu untuk memperoleh data.
• Proses ini akan berulang hingga proses pengamatan selesai.
Gambar 20 Diagram alir prinsip kerja platform
Keterangan: Ketika platform mencapai ujung lintasan, trigger rangkaian logic pembalik arah akan aktif dan membalik logic h-bridge sehingga platform berbalik arah.
Keterangan: Jumlah putaran roda dihitung oleh rangkaian penjeda gerak, bila jumlah putaran sudah mencapai 64 kali maka platform akan berhenti selama 8 menit, sebelum bergerak kembali.