JUSIKOM – DESEMBER 2016 Novi Lestari
STMIK MUSIRAWAS 37
IMPLEMENTASI PERANGKAT WIFI SEBAGAI PENGENDALI ROBOT MOBIL PEMANTAU
NOVI LESTARI - STMIK MUSIRAWAS Lubuklinggau
Jl. Jendral Besar H.M Soeharto KM. 13 Kel. Lubuk Kupang Kec. Lubuklinggau Selatan I Kota Lubuklinggau Sumatera Selatan Telp: (0733) 3280300
Email : [email protected]
ABSTRAK
Perangkat wireless fiderity (Wi-Fi) merupakan sebuah perangkat networking atau jaringan yang sangat umum kita temui sekarang ini. Dengan kemudahan untuk menggunakan wireless fiderity baik menggunakan komputer jinjing maupun gadget akan memudahkan kita untuk dapat berkomunikasi dengan perangkat elektronika lain dengan jarak yang cukup jauh. Dalam pembuatan implementasi perangkat wireless fiderity ini yang digunakan sebagai pengendali motor dc sebagai penggerak roda robot mobil yang diatur melalui raspberry sebagai perangkat inti pengontrol data masukan dan inputan melalui port-port yang telah disediakan oleh raspberry dan sebagai alat pemantau digunakan media webcam yang telah diperintahkan untuk dapat mentransfer data pada saat startup pertama raspberry.
Kata Kunci : Wireless Fiderity, Raspberry
PENDAHULUAN
Robot merupakan sistem elctro
mechanical yang dapat melakukan
tugasfisik baik secara otomatis maupun secara manual. Dalam dunia keamanan era modern ini pemanfaatan robot semakin meningkat, hal ini dikarenakan robot dapat membantu dan memudahkan aktivitas manusia dalam segala aspek kehidupan.
Robot yang digunakan dalam dunia keamanan biasanya berbentuk miniatur mobil yang menggunakan roda sebagai mekanik penggeraknya misalnya robot penjinak bom dengan tambahan lengan robot sebagai perpanjangan tangan manusia untuk menjinakkan bom, robot penjinak api yang dapat membantu memadamkan api pada saat kebakaran, dan sebagainya.
Robot mobil pemantau ini dirancang dengan menggunakan raspberry serta dengan menggunakan wireless ffiderity sebagai media pengendali robot mobil ini.
Dimana raspberry sudah dilengkapi dengan port GPIO yang memungkinkan untuk dapat berkomunikasi dengan chip driver motor yang berguna sebagai penggerak roda pada robot mobil serta dilengkapi dengan port Ethernet untuk berkomunikasi dengan perangkat Access Point serta port USB yang dapat digunakan sebagai komunikasi dengan webcam serta berguna
sebagai fungsi pemantau yang
menampilkan gambar bagian depan robot mobil.
Wireless Fidelity
Gambar 1. Wireless Fidelity
Wireless fiderity Awalnya ditujukan untuk pengunaan perangkat nirkabel dan
JUSIKOM – DESEMBER 2016 Novi Lestari
STMIK MUSIRAWAS 38
Jaringan Area Lokal (LAN), namun saat ini lebih banyak digunakan untuk mengakses Internet. Hal ini memungkinan seseorang dapat menggunakan komputer dan kartu nirkabel (Wireless card) atau personal digital assistant (PDA) untuk terhubung dengan Internet dengan menggunakan titik akses (atau dikenal dengan Hotspot) terdekat.
Dalam jaringan Wireless fiderity terdapat beberapa standard gelombang yang
dibagi menjadi beberapa katagori
diantaranya adalah :
a. Standar Wi-Fi Awal 802.11
Standar 802.11 pada awalnya
disahkan pada tahun 1997 dengan
mencakup frequency hopping spread
spectrum (FHSS) physical layers dan direct sequence spread spectrum (DSSS) physical layers yang beroperasi pada pita 2.4 GHz dengan kecepatan datasampai 2 Mbps.
b. Standar Wi-Fi 802.11a
Di akhir tahun 1999, IEEE
mengeluarkan 802.11a yang menetapkan
operasi pita 5 GHz menggunakan
Orthogonal Frequency Division
Multiplexing (OFDM) dengan kecepatan data mencapai 54 Mbps.
c. Standar Wi-Fi 802.11b
Bersama dengan 802.11a, IEEE mengesahkan 802.11b, yang merupakan ekstensi kecepatan tinggi, ke standar direct sequence awal pada pita 2.4 GHz dengan kecepatan data sampai dengan 11 Mbps.
d. Standar Wi-Fi 802.11g
IEEE mengesahkan standar 802.11g yang kompatibel dengan 802.11b pada
tahun 2003 dengan meningkatkan
performanya mencapai 54 Mbps pada pita 2.4 GHz dengan menggunakan OFDM.
Tabel 1. Perbandingan Standarisasi
Wireless
IP Adress Dan Subneting
Internet Protocol (IP) address adalah alamat numerik yang ditetapkan untuk sebuah komputer yang berpartisipasi dalam jaringan komputer yang memanfaatkan Internet Protocol untuk komunikasi antara node-nya. Walaupun alamat IP disimpan sebagai angka biner, mereka biasanya ditampilkan agar memudahkan manusia
menggunakan notasi, seperti
208.77.188.166 (untuk IPv4), dan 2001: db8: 0:1234:0:567:1:1 (untuk IPv6).
Raspberry
Raspberry adalah sebuah komputer yang berukuran kecil yang dapat digunakan sebagai alat pembelajaran oleh seluruh pengguna segala usia dengan biaya yang murah untuk dapat mempelajari bahasa pemrograman seperti phyton dan scratch.
JUSIKOM – DESEMBER 2016 Novi Lestari
STMIK MUSIRAWAS 39
Spesifikasi Raspberry :
Chip : Broadcom BCM2835 (CPU,
GPU, DSP, and SDRAM)
CPU : 700 MHz ARM1176JZF-S core
(ARM6 family)
GPU : Broadcom VideoCore IV,
OpenGL ES 2.0, 1080p30
h.264/MPEG-4 AVC high-profile
decoder
Memory (SDRAM) : 512 MB (shared
with GPU)
USB 2.0 ports : 2 (via integrated USB
hub)
Video Outputs : Composite RCA (PAL
& NTSC), HDMI (rev 1.3 & 1.4), raw LCD Panels via DSI 14 HDMI
resolutions from * 640×350 to
1920×1200 plus various PAL and NTSC standards.
Audio Outputs : 3.5 mm jack, HDMI
Onboard storage : SD / MMC / SDIO
card slot
Onboard network : 10/100 Ethernet
(RJ45)
Low-level peripherals: 8 × GPIO,
UART, I²C bus, SPI bus with two chip selects, +3.3 V, +5 V, Ground[58][63]
Power ratings : 700 mA (3.5 W)
Power source : 5 Volt via MicroUSB
or GPIO header
Size : 85.60 × 53.98 mm (3.370 ×
2.125 in)
Weight : 45 g (1.6 oz)
Operating systems : Debian
GNU/Linux, Fedora, Arch Linux
ARM, RISC OS
IC L293D
IC driver L293D merupakan H-bridge driver dengan kemampuan yang jauh lebih
unggul dibandingkan H-bridge biasa
(terbuat dari transistor yang dirangkai menjadi H-bridge). Memiliki kelebihan antaranya:
a. Lebih mudah pembuatannya b. Mampu menangani 2 motor
c. Arus dan tegangannya relatif lebih besar daripada transistor
Gambar 3. IC L293D
Tabel 2. Keterangan Pin IC L293D
Perancangan Alat
Perancangan merupakan langkah awal dalam suatu proses pembuatan robot
otomatis. Perancangan ini meliputi
beberapa tahapan perancangan alat yang
diantaranya membuat blok diagram,
memilih komponen yang sesuai
karakteristik, sesuai kebutuhan dan sesuai
dengan data book agar pemilihan
komponen sesuai dengan spesifikasi dari alat yang akan dibuat.
Blok Diagram
JUSIKOM – DESEMBER 2016 Novi Lestari
STMIK MUSIRAWAS 40
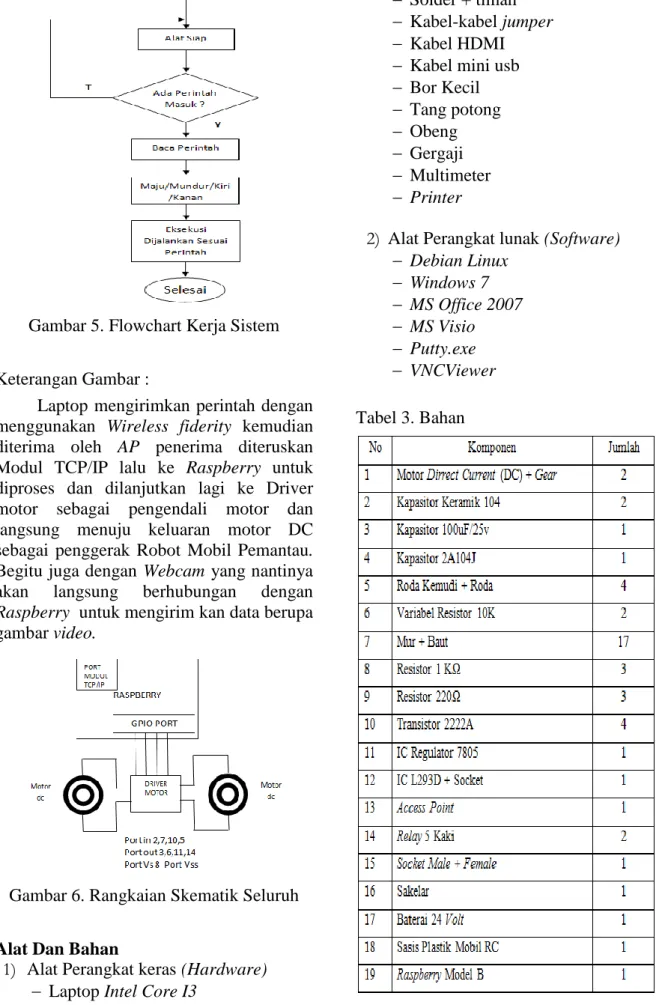
Gambar 5. Flowchart Kerja Sistem
Keterangan Gambar :
Laptop mengirimkan perintah dengan menggunakan Wireless fiderity kemudian diterima oleh AP penerima diteruskan Modul TCP/IP lalu ke Raspberry untuk diproses dan dilanjutkan lagi ke Driver motor sebagai pengendali motor dan langsung menuju keluaran motor DC sebagai penggerak Robot Mobil Pemantau. Begitu juga dengan Webcam yang nantinya
akan langsung berhubungan dengan
Raspberry untuk mengirim kan data berupa gambar video.
Gambar 6. Rangkaian Skematik Seluruh
Alat Dan Bahan
1) Alat Perangkat keras (Hardware)
Laptop Intel Core I3
Acrylic
Solder + timah
Kabel-kabel jumper
Kabel HDMI
Kabel mini usb
Bor Kecil Tang potong Obeng Gergaji Multimeter Printer
2) Alat Perangkat lunak (Software)
Debian Linux Windows 7 MS Office 2007 MS Visio Putty.exe VNCViewer Tabel 3. Bahan
JUSIKOM – DESEMBER 2016 Novi Lestari
STMIK MUSIRAWAS 41
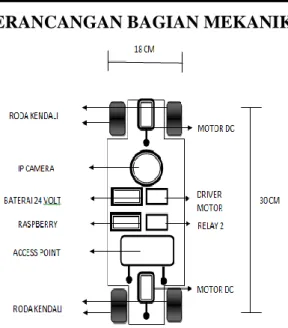
PERANCANGAN BAGIAN MEKANIK
Gambar 7. Tata Letak Alat Dan Komponen
Keterangan Gambar: Dimensi robot adalah :
a. Panjang : 30 cm
b. Lebar : 18 cm
c. Tinggi : 2 cm
Struktur Material Robot
a. Rangka Mobil RC b. Roda Karet (4 buah)
c. Motor DC 12Volt + Gear (1 buah) d. Motor DC 5Volt + Gear (1 buah) e. Baterai 24 Volt (1 buah)
Mekanik robot ini dibentuk seperti mobil. Gambar dibawah ini menampilkan hasil desain robot mobil pemantau tampak atas dan depan robot.
Gambar 8. Hasil Rancangan Robot
HASIL DAN PEMBAHASAN
ANALISIS PENGUKURAN
RASPBERRY MODEL B
Pengukuran raspberry ini dilakukan pada port yang di pilih sebagai keluaran pada raspberry untuk Output motor penggerak yaitu port GPIO1 sampai port GPIO4. hasil dari pengukuran adalah sebagai berikut :
Tabel 4. Deret Bit dan Posisi Pergerakan Robot
Deret Bit Posisi Robot
1000 Maju 0100 Mundur 0010 Kanan 0001 Kiri 0000 Diam ANALISA PENGUKURAN RANGKAIAN MOTOR DC
Tujuan pengukuran rangkaian motor dc dengan adalah agar kecepatan dan arah perputaran motor dc dapat dikendalikan. Dalam hal ini arah perputaran motor dc diatur dengan menghubungkan pin Input IC L293D ke Ground atau Vcc, sedangkan perputaran arah motor dc diatur dengan mengubah nilai enable dan Input. Pengujian
menunjukkan bahwa rangkaian dapat
JUSIKOM – DESEMBER 2016 Novi Lestari
STMIK MUSIRAWAS 42
Tabel 5. Hasil Pengukuran Motor DC
Motor Aktif Motor Tidak Aktif
0,2 VDC 11,80 VDC
0,2 VDC 11.72 VDC
0,1 VDC 11,67 VDC
Analisa Pengukuran Jarak Akurasi Sinyal Wireless Fiderity
Hasil pengukuran jarak akurasi sinyal Wireless fiderity adalah untuk mengetahui seberapa jauh jarak yang dapat dilakukan oleh sinyal Wireless fiderity untuk dapat terus terkoneksi dengan perangkat jaringan yang terdapat pada robot utama. Pada tahap pengujian ini digunakan kawasan tanpa dinding penghalang atau diluar ruangan, menggunakan dinding penghalang seperti tembok beton serta dari dalam ruangan ke luar ruangan maka didapat beberapa hasil pengujian tersebut seperti dibawah ini. Tabel 6. Hasil Pengukuran Wireless fiderity diluar ruangan luas
Jarak (m) Keterangan 10 m Terkoneksi 20 m Terkoneksi 30 m Terkoneksi 40 m Terkoneksi 50 m Terkoneksi
Tabel 7. Hasil Pengukuran Wireless fiderity diluar ruangan luas dengan dinding penghalang berupa tembok beton.
Jarak (m) Keterangan 10 m Terkoneksi 20 m Terkoneksi 30 m Terkoneksi 40 m Tidak terkoneksi 50 m Tidak terkoneksi
Tabel 8. Hasil Pengukuran Wireless fiderity dari dalam ruangan ke luar ruangan
Jarak (m) Keterangan 10 m Terkoneksi 20 m Terkoneksi 30 m Tidak terkoneksi 40 m Tidak terkoneksi 50 m Tidak terkoneksi KESIMPULAN
Selama mengerjakan penulisan ini, dari perancangan pembuatan struktur robot secara fisik, sampai dengan pemrograman raspberry untuk mengendalikannya, maka dapat disimpulkan sebagai berikut :
1. Berdasarkan Program pada raspberry, robot memiliki pergerakan empat arah, yaitu maju, mundur, kiri, kanan yang
akan dikendalikan oleh user
menggunakan laptop melalui media Wireless fiderity.
2. Pergerakan robot disesuaikan Inputan dari laptop yang kemudian diproses oleh raspberry yang telah di Program.
3. Gambar tampilan dari webcam
ditampilkan dengan browser sesuai dengan software yang telah ada oleh pabrik.
4. Semakin tebal dan padatnya
penghalang yang memotong sinyal Wireless fiderity maka akan semakin lemah sinyal Wireless fiderity yang mampu ditangkap oleh masing-masing
alat pengkoneksi dari pengontrol
dengan robot utama.
5. Pengujian koneksi menggunakan
Access Point LINKSYS tipe WRT54GL dengan laptop TOSHIBA Satellite L630 menghasilkan jarak terjauh tanpa penghalang 50m.
SARAN
Untuk dapat meningkatkan fungsi dan kinerja alat yang lebih baik, berikut adalah langkah-langkah yang dapat dilakukan :
1. Agar pergerakan Robot bisa lebih leluasa dan jarak jangkauan kendali
JUSIKOM – DESEMBER 2016 Novi Lestari
STMIK MUSIRAWAS 43
lebih jauh jaringan Wireless fiderity dapat diganti dengan menggunakan
jaringan Internet agar dapat
memaksimalkan jarak jangkau robot mobil pemantau.
2. Untuk webcam agar dapat
memaksimalkan ruang cakupan gambar bias digunakan motor servo agar dapat bergerak ke belakang, depan, kiri dan kanan.
3. Tata letak komponen rangkaian bisa ditutup dengan menggunakan box yang terbuat dari akrilik agar pada saat memantau pada keadaan cuaca apa saja dapat dilakakukan tanpa terhalang hujan dan lain sebagainya.
4. Agar dapat memaksimalkan gerak robot dapat digunakan sasis yang fleksibel serta roda yang lebih mampu untuk berjalan dimana saja.
5. Program Robot harus selalu
dikembangkan agar kinerja Robot bisa lebih baik lagi.
DAFTAR PUSTAKA
Andrianto, H. 2013, Pemrograman
Mikrokontroler AVR Atmega 16 Menggunakan Bahasa C, Informatika, Bandung
Arifianto, D. 2011, Kamus Komponen Elektronika, PT Kawan Pustaka, Surabaya
Budiharto, W. 2011, Aneka Proyek
Mikrokontroler, Graha Ilmu,
Jogjakarta
Dewi Tresna, Pola Risma. 2011.
AplikasinFlexiforce Pada Robot
Pemindah Barang Otomatis Berbasis Mikrokontroler Avr Atmega 8.2 – 3 Teknik Elektro
Glaser, Horst Albert and Rossbach. Sabine: The Artificial Human, Frankfurt/M., Bern, New York 2011
Jatmika, Y,N. 2011, Cara Mudah Merakit Robot Untuk Pemula, Flashbooks, Jogjakarta
Suyadhi, T.D.S. 2010, Buku Pintar
Robotika : Bagaimana Merancang Dan Membuat Robot Sendiri, Andi, Yogyakarta