Kontroler lengan robot menggunakan motor servo dan motor stepper dengan masukan 3 AXIS.
Teks penuh
Gambar
![Gambar 2.4. Pengukuran absolute dan incremental [4]](https://thumb-ap.123doks.com/thumbv2/123dok/869209.593993/33.612.88.542.84.524/gambar-pengukuran-absolute-dan-incremental.webp)
![Gambar 2.11 Interface Visual Basic 6.0.[12]](https://thumb-ap.123doks.com/thumbv2/123dok/869209.593993/39.612.91.533.243.602/gambar-interface-visual-basic.webp)

Dokumen terkait
Terselesaikannya tugas akhir dengan judul “ PERANCANGAN SISTEM KENDALI ROBOT TANGAN MENGGUNAKAN MOTOR SERVO DAN SENSOR FLEX BERBASIS MIKROKONTROLER ATMEGA32 ” ini tidak
Tombol keypad ini berfungsi sebagai kode input pada alat untuk menggerakkan dan memposisikan motor servo pada lengan dan servo pada jari yang telah dikondisikan sesuai
Robot Berlengan ini dirancang menggunakan aplikasi Motor Servo untuk menggerakkan lengan naik dan turun untuk mengangkut tong sampah pada tiap kelas, robot ini
Gambar 14 Motor servo dengan kerangka robot Setelah pengujian dilakukan dengan mengambil tegangan dari USB untuk menghidupkan board arduino, 8 buah motor servo tidak
pada perancangan mobil robot dapat melakukan pekerjaan sesuai perintah yang di inginkan maka Module Arduino UNO di coding menggunkan aplikasi Arduino IDE dengan
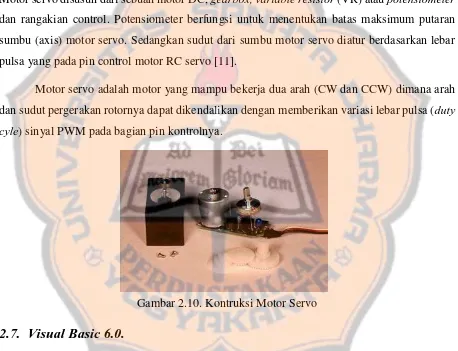
Motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor
Nilai error rata-rata sudut diinginkan pada pergelangan tangan terhadap sudut yang terbaca pada motor servo pada replika lengan robot adalah pergelangan tangan
Robot lengan menggunakan perintah suara adalah sebuah robot yang dapat digunakan untuk membantu pekerjaan manusia sehari-hari dengan menggunkan perintah suara.. Robot
