SKRIPSI
PENGARUH KEDIP TEGANGAN TUNGGAL DAN GANDA PADA PERFORMA MOTOR INDUKSI
DAN PROFIL TEGANGAN
Diajukan Untuk Memenuhi Salah Satu Persyaratan dalam Menyelesaikan Pendidikan Sarjana (S-1) pada Departemen Teknik Elektro Sub Konsentrasi
Teknik Energi Listrik
Oleh:
RICANDRA SEMBIRING NIM: 140402097
DEPARTEMEN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS SUMATERA UTARA MEDAN
2020
ABSTRAK
Kedip tegangan merupakan gangguan tegangan sementara dengan magnitude 0,1 sampai 0,9 pu dari nilai nominal tegangan. Kedip tegangan memiliki durasi sebesar 0,5 cycle sampai 1 menit. Kedip tegangan dapat menyebabkan industri mengalami kerugian pada proses produksi. Hal ini dikarenakan kedip tegangan dapat menyebabkan motor induksi yang digunakan untuk menggerakan suatu industri mengalami perubahan kecepatan putar, bahkan mengalami stalling atau berhenti bekerja. Kedip tegangan yang dibahas dalam penelitian ini adalah kedip tegangan tunggal dan ganda. Kedip tegangan tunggal terjadi diakibatkan gangguan hubung singkat pada sistem diisolir oleh CB sedangkan kedip tegangan ganda terjadi diakibatkan gangguan hubung singkat diisolir recloser. Dalam penelitian dilakukan simulasi dengan software ATP Draw 6.1. Simulasi dilakukan dengan 7 kasus, dimana setiap kasus sistem akan dibebani beberapa motor yang berbeda. Ketika kedip tunggal terjadi pemulihan kecepatan motor induksi cukup lama atau lebih dari 5 detik, maka kedip tegangan ganda menyebabkan pemulihan tegangan bus PCC dan pemulihan kecepatan, arus, dan torsi motor induksi yang lebih lama. Ketika kedip tunggal terjadi pemulihan kecepatan motor induksi cukup cepat atau kurang dari 5 detik, maka kedip tegangan ganda menyebabkan pemulihan tegangan bus PCC dan pemulihan kecepatan, arus, dan torsi motor induksi dengan waktu yang sama yaitu kurang dari 5 detik. Motor induksi berkapasitas besar dengan torsi beban konstan dan momen inersia beban kecil sangat rentan dengan kedip tegangan tunggal dan ganda yang dapat menyebabkan motor mengalami stalling.
Kata Kunci: kedip tegangan, motor induksi, ATP Draw
KATA PENGANTAR
Puji dan syukur penulis ucapkan kepada Tuhan Yang Maha Esa karena berkat-Nya penulis dapat menyelesaikan skripsi ini yang berjudul: ”Pengaruh Kedip Tegangan Tunggal dan Ganda Pada Performa Motor Induksi dan Profil Tegangan”.
Skripsi ini penulis persembahkan kepada orangtua yang sangat penulis cintai, yaitu Bapak Jaya Sembiring dan Ibu Rista Br Sinulingga yang telah berjuang membiayai, memberikan semangat, dan mendoakan penulis selama masa studi hingga menyelesaikan skripsi ini.
Penulis menyadari bahwa skripsi ini tidak mungkin terselesaikan tanpa adanya dukungan, bantuan, dan nasehat dari berbagai pihak selama penyusunan skripsi ini. Pada kesempatan ini penulis menyampaikan terima kasih sebesar- besarnya kepada:
1. Bapak Ir. Surya Hardi, M.S., Ph.D., selaku Dosen Pembimbing skripsi yang telah meluangkan waktunya untuk memberikan bimbingan dan bantuan dalam penyusunan skripsi ini.
2. Bapak Ir. Zulkarnaen Pane, M.T., selaku Dosen Penasehat Akademik yang telah memberikan arahan dan nasehat dalam melaksanakan perkuliahan.
3. Bapak Ir. Hendra Zulkarnain, M.T., selaku Dosen Pembanding skripsi yang telah banyak memberikan arahan dan masukan dalam penyempurnaan penulisan skripsi ini.
4. Bapak Ferry Rahmat Astianta Bukit, S.T, M.T., selaku Dosen Pembanding skripsi yang telah banyak memberikan arahan dan masukan dalam penyempurnaan penulisan skripsi ini.
5. Seluruh Bapak dan Ibu Dosen yang telah mendidik penulis selama masa perkuliahan.
6. Seluruh staff Pegawai Departemen Teknik Elektro yang telah membantu proses administrasi penulis selama masa perkuliahan
7. Teman-teman Elektro Angkatan 2014
8. Seluruh Abang/Kakak senior dan Adik Junior
Penulis menyadari bahwa dalam penulisan skripsi ini masih jauh dari kata sempurna karena masih banyak kekurangan dari segi isi maupun susunan bahasanya. Saran dan kritik dari pembaca sangat diharapkan penulis yang bertujuan untuk perbaikan dan penyempurnaan skripsi ini. Semoga skripsi ini dapat bermanfaat bagi penulis maupun para pembaca.
Medan, Oktober 2020 Penulis
Ricandra Sembiring
DAFTAR ISI
ABSTRAK ... i
KATA PENGANTAR ... ii
DAFTAR ISI ... iv
DAFTAR GAMBAR ... vii
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang... 1
1.2 Rumusan Masalah ... 3
1.3 Tujuan Penelitian ... 4
1.4 Manfaat Penelitian ... 4
1.5 Batasan Masalah ... 4
BAB II TINJAUAN PUSTAKA ... 5
2.1 Sistem Tenaga Listrik ... 5
2.2 Point of Common Coupling (PCC) ... 6
2.3 Kualitas Daya Listrik ... 6
2.4 Kedip Tegangan... 9
2.4.1 Durasi Kedip Tegangan... 9
2.4.2 Magnitude Kedip Tegangan ... 10
2.4.3 Penyebab Kedip Tegangan ... 11
2.5 Klasifikasi Kedip Tegangan ... 11
2.5.1 Kedip Tegangan Tunggal ... 12
2.5.2 Kedip Tegangan Ganda ... 12
2.6 Motor Induksi ... 13
2.6.1 Konstruksi Motor Induksi ... 14
2.6.2 Prinsip Kerja Motor Induksi... 14
2.6.3 Karakteristik Motor Induksi ... 16
2.6.4 Rangkaian Ekivalen Motor Induksi ... 16
2.7 Torsi Beban Motor Induksi ... 17
2.7.1 Torsi Beban Variabel ... 18
2.7.2 Torsi Beban Konstan ... 18
2.7.3 Torsi Beban Linear ... 19
2.7.4 Torsi Beban Inverse ... 19
2.8 Pengaruh Kedip Tegangan pada Torsi, Kecepatan, dan Arus Motor Induksi ... 20
2.9 Alternative Transients Program ... 22
BAB III METODE PENELITIAN ... 24
3.1 Waktu dan Tempat Penelitian ... 24
3.2 Data-data yang Diperlukan ... 24
3.3 Variabel yang Diamati ... 24
3.4 Prosedur Penelitian ... 24
BAB IV HASIL PENELITIAN DAN PEMBAHASAN ... 31
4.1 Pemodelan Sistem Kelistrikan Distribusi Industri ... 31
4.2 Simulasi Kedip Tegangan... 31
4.3 Pengaruh Kedip Tegangan pada Performa Motor yang Berkapasitas Berbeda ... 33
4.4 Pengaruh Kedip Tegangan pada Performa Motor dengan Momen Inersia Beban Berbeda ... 37
4.5 Pengaruh Kedip Tegangan pada Performa Motor yang Dibebani Torsi Variabel, Linear, dan Kostan ... 42
4.6 Pengaruh Kedip Tegangan pada Profil Tegangan Sistem dengan Beban Beberapa Motor Berkapasitas Besar ... 47
4.7 Pengaruh Kedip Tegangan pada Profil Tegangan Sistem dengan Beban Beberapa Motor Berkapasitas Kecil ... 48
4.8 Pengaruh Kedip Tegangan pada Profil Tegangan Sistem dengan Beban Beberapa Motor yang Memiliki Momen Inersia Beban Besar ... 49
4.9 Pengaruh Kedip Tegangan pada Profil Tegangan Sistem dengan Beban Beberapa Motor yang Memiliki Momen Inersia Beban Kecil .... 50
4.10 Pengaruh Kedip Tegangan pada Profil Tegangan Sistem yang Dibebani Beberapa Motor dengan Torsi Beban Konstan ... 51
BAB V KESIMPULAN DAN SARAN ... 53
5.1 Kesimpulan ... 53
5.2 Saran ... 53
DAFTAR PUSTAKA ... 55
LAMPIRAN ... 58
Lampiran A ... 58
Lampiran B... 59
Lampiran C... 60
Lampiran D ... 61
Lampiran E ... 62
Lampiran F ... 63
Lampiran G ... 64
Lampiran H ... 65
Lampiran I ... 66
Lampiran J ... 67
Lampiran K ... 68
Lampiran L ... 69
Lampiran M ... 70
Lampiran N ... 71
DAFTAR GAMBAR
Gambar 2.1 Sistem distribusi tenaga listrik ... 5
Gambar 2.2 Point of Common Coupling (PCC)... 6
Gambar 2.3 Gangguan tegangan berdasarkan durasi dan magnitudenya ... 8
Gambar 2.4 Karakteristik kedip tegangan ... 9
Gambar 2.5 Kedip tegangan pada bus PCC ... 10
Gambar 2.6 Bentuk gelombang kedip tegangan tunggal ... 12
Gambar 2.7 Mekanisme terjadinya kedip tegangan ganda pada bus PCC ... 13
Gambar 2.8 Bentuk gelombang kedip tegangan ganda ... 13
Gambar 2.9 Karakteristik motor induksi ... 16
Gambar 2.10 Rangkaian ekivalen motor induksi ... 17
Gambar 2.11 Torsi beban variabel ... 18
Gambar 2.12 Torsi beban konstan ... 18
Gambar 2.13 Torsi beban linear ... 19
Gambar 2.14 Torsi beban inverse ... 19
Gambar 2.15 Pengaruh kedip tegangan torsi motor induksi ... 20
Gambar 2.16 Pengaruh kedip tegangan arus motor induksi ... 22
Gambar 2.17 Program ATP Draw dan komponennya ... 23
Gambar 3.1 Flowchart penelitian ... 25
Gambar 3.2 Sistem distribusi industri ... 26
Gambar 4.1 Pemodelan sistem distribusi industri pada program ATP Draw ... 32
Gambar 4.2 Pengaruh kedip tegangan tunggal pada kecepatan motor induksi yang berkapasitas berbeda... 33
Gambar 4.3 Pengaruh kedip tegangan ganda pada kecepatan motor induksi yang berkapasitas berbeda... 34
Gambar 4.4 Pengaruh kedip tegangan tunggal pada torsi motor induksi yang berkapasitas berbeda ... 35
Gambar 4.5 Pengaruh kedip tegangan ganda pada torsi motor induksi yang berkapasitas berbeda ... 35 Gambar 4.6 Pengaruh kedip tegangan tunggal pada arus motor induksi yang berkapasitas berbeda ... 36 Gambar 4.7 Pengaruh kedip tegangan ganda pada arus motor induksi yang
berkapasitas berbeda ... 37 Gambar 4.8 Pengaruh kedip tegangan tunggal pada kecepatan motor induksi dengan momen inersia beban berbeda ... 38 Gambar 4.9 Pengaruh kedip tegangan ganda pada kecepatan motor induksi dengan momen inersia beban berbeda ... 39 Gambar 4.10 Pengaruh kedip tegangan tunggal pada torsi motor induksi
dengan momen inersia beban berbeda ... 39 Gambar 4.11 Pengaruh kedip tegangan ganda pada torsi motor induksi
dengan momen inersia beban berbeda ... 40 Gambar 4.12 Pengaruh kedip tegangan tunggal pada arus motor induksi dengan momen inersia beban berbeda ... 41 Gambar 4.13 Pengaruh kedip tegangan ganda pada arus motor induksi
dengan momen inersia beban berbeda ... 42 Gambar 4.14 Pengaruh kedip tegangan tunggal pada kecepatan motor
induksi yang dibebani torsi variabel, linear, dan konstan ... 43 Gambar 4.15 Pengaruh kedip tegangan ganda pada kecepatan motor induksi yang dibebani torsi variabel, linear, dan konstan ... 43 Gambar 4.16 Pengaruh kedip tegangan tunggal pada torsi motor induksi yang dibebani torsi variabel, linear, dan konstan ... 44 Gambar 4.17 Pengaruh kedip tegangan ganda pada torsi motor induksi yang dibebani torsi variabel, linear, dan konstan ... 45 Gambar 4.18 Pengaruh kedip tegangan tunggal pada arus motor induksi yang dibebani torsi variabel, linear, dan konstan ... 46 Gambar 4.19 Pengaruh kedip tegangan ganda pada arus motor induksi yang dibebani torsi variabel, linear, dan konstan ... 46 Gambar 4.20 Pengaruh kedip tegangan tunggal pada profil tegangan sistem yang dibebani beberapa motor besar ... 48 Gambar 4.21 Pengaruh kedip tegangan tunggal pada profil tegangan sistem yang dibebani beberapa motor kecil ... 49
Gambar 4.22 Pengaruh kedip tegangan tunggal pada profil tegangan sistem yang dibebani beberapa motor dengan momen inersia besar ... 50 Gambar 4.23 Pengaruh kedip tegangan tunggal pada profil tegangan sistem yang dibebani beberapa motor dengan momen inersia kecil ... 51 Gambar 4.24 Pengaruh kedip tegangan tunggal pada profil tegangan sistem yang dibebani beberapa motor dengan torsi beban konstan ... 52
BAB I PENDAHULUAN
1.1 Latar Belakang
Persoalan kualitas daya dipengaruhi oleh gangguan yang terjadi dalam sistem. Oleh karena itu, untuk mendapatkan kualitas daya yang baik dilakukan upaya untuk pencegahan gangguan kualitas daya. Sebelum menentukan tindakan pencegahan yang dapat diandalkan, maka lebih dahulu dilakukan analisa pengklasifikasian gangguan yang akurat. Sehingga pencegahan yang sesuai dapat dilakukan untuk gangguan. Hal ini sangat diperlukan dalam industri untuk membuat rancangan supaya meningkatkan keandalan operasi peralatan listrik suatu industri.
Konsumen industri dalam proses produksinya menggunakan mesin listrik dan peralatan elektronik seperti variable speed drive, PLC, dan sensor yang sensitif pada deviasi tegangan dan frekuensi. Oleh karena itu, untuk kelancaran proses produksi maka diperlukan suplai daya dengan kualitas yang baik. Dalam industri dilakukan pencegahan gangguan kualitas daya yang biasanya menggunakan Uninterruptible Power Supplies (UPS), Dynamic Voltage Restorers (DVR) dan Active Power Filters (APF).
Motor induksi merupakan motor yang paling banyak digunakan dalam industri. Hal ini dikarenakan konstruksinya yang sederhana, harga dan perawatannya yang murah, serta efisiensinya lebih tinggi dari jenis motor lainya.
Motor induksi biasanya digunakan sebagai penggerak dalam proses produksi
suatu industri. Motor induksi akan mengalami perubahan kecepatan dan torsi jika terjadi gangguan kualitas daya pada penyuplainya. Salah satu gangguan kualitas daya yang biasa mengganggu operasi motor induksi dalam industri adalah kedip tegangan.
Kedip tegangan dapat menghambat operasi suatu industri karena kedip tegangan dapat membuat motor induksi yang digunakan sebagai penggerak mengalami penurunan kecepatan dan torsi sehingga motor induksi dapat mengalami stalling apabila torsi motor lebih kecil dari torsi beban. Sumber utama kedip tegangan adalah gangguan hubung singkat, starting motor, dan energizing transformator. Gangguan hubung singkat tiga fasa merupakan penyebab kedip tegangan yang paling parah. Kedip tegangan dapat terjadi secara ganda karena adanya recloser pada sisi gangguan. Recloser beroperasi secara otomatis membuka dan menutup ketika terjadi gangguan.
Penelitian sebelumnya dilakukan oleh Pichai Aree [3] tentang pengaruh motor induksi pada profil kedip tegangan yang dihasilkan. Penelitian tersebut menunjukkan bahwa kapasitas motor induksi yang besar mempengaruhi bentuk dari kedip tegangan tunggal yaitu bentuk kedip tegangan menjadi tidak persegi panjang. Kemudian penelitian Surya Hardi dengan eksperimen dan Mansour Ojaghi dengan simulasi [2,4] tentang performa motor induksi diakibatkan oleh berbagai kedip tegangan tunggal. Dimana variasi kedip tegangan tunggal yang dimaksud adalah kedip tegangan tunggal simetris dan asimetris. Kedip tegangan simetris tunggal berdampak lebih parah pada motor induksi karena menyebabkan arus inrush motor induksi yang besar. Penelitian yang terkait oleh Zhijun Wang
[5] tentang performa beberapa motor induksi ketika pemulihan tegangan akibat kedip tegangan tunggal. Performa motor induksi akibat kedip tegangan tidak hanya bergantung pada keadaan motor itu sendiri tetapi bergantung juga pada keadaan motor lain yang terpasang dalam sistem yang saling berinteraksi. Pada saat pemulihan tegangan, motor induksi akan berakselerasi apabila torsi motor lebih besar torsi beban dan motor induksi akan mengalami stalling apabila torsi lebih motor kecil dari torsi beban. Serta penelitian Fikri Waskito [6]
menginvestigasi pengaruh kedip tegangan tunggal pada motor induksi. Kedip tegangan tunggal diakibatkan oleh gangguan hubung singkat dengan resistansi yang berbeda-beda. Studi pengaruh kedip tegangan ganda telah dilakukan oleh beberapa peneliti [15,17] yaitu pengaruh kedip tegangan ganda pada performa kontaktor. Penelitian tersebut menunjukkan bahwa durasi, magnitude, dan POW kedip tegangan mempengaruhi performa kontaktor.
Dalam penelitian ini akan dilakukan simulasi kedip tegangan tunggal dan ganda dengan beberapa motor induksi. Simulasi dilakukan dengan memodelkan sistem distribusi industri pada salah satu jurnal IEEE [7] yang mengalami kedip tegangan simetris menggunakan software ATPDRAW versi 6.1. Kemudian akan diamati pengaruh kedip tegangan pada profil tegangan pada bus pcc dan performa motor, yaitu arus, torsi, dan kecepatan motor.
1.2 Rumusan Masalah
Adapun yang menjadi rumusan masalah dalam skripsi ini adalah :
1. Bagaimana pengaruh kedip tegangan tunggal dan ganda pada profil tegangan pada bus pcc?
2. Bagaimana pengaruh kedip tegangan tunggal dan ganda pada arus, torsi, dan kecepatan motor induksi?
1.3 Tujuan Penelitian
Adapun tujuan dari penulisan skripsi ini adalah :
1. Membandingkan pengaruh kedip tegangan tunggal dan ganda pada profil tegangan yang dihasilkan pada bus pcc
2. Membandingkan pengaruh kedip tegangan tunggal dan ganda pada arus, torsi, dan kecepatan motor induksi
1.4 Manfaat Penelitian
Manfaat dari penelitian ini memberikan masukan bagi industri untuk mengatur intelejensi peralatan proteksinya supaya ketika kedip tegangan terjadi tidak menimbulkan gangguan pada proses produksi yaitu dengan berhentinya motor induksi yang beroperasi.
1.5 Batasan Masalah
Adapun batasan masalah untuk memudahkan penelitian ini:
1. Simulasi tegangan kedip dilakukan menggunakan bantuan software ATP Draw versi 6.1
2. Kedip tegangan diakibatkan gangguan hubung singkat tiga fasa 3. Kedip tegangan ganda diakibatkan adanya recloser pada sisi gangguan 4. Studi kasus diambil dari sistem distribusi industri dari salah satu jurnal
IEEE [7]
BAB II
TINJAUAN PUSTAKA
2.1 Sistem Tenaga Listrik
Sistem tenaga listrik diklasifikasikan menjadi tiga bagian, yaitu sistem pembangkit, sistem transmisi, dan sistem distribusi. Sistem pembangkit merupakan sistem untuk membangkitkan tenaga listrik dengan tegangan yang nilainya antara 6 kV sampai dengan 24 kV. Sistem transmisi merupakan sistem yang mentransmisikan tenaga listrik dengan tegangan yang nilainya antara 150 kV sampai dengan 500 kV. Sistem distribusi merupakan sistem yang mendistribusikan tenaga listrik dengan tegangan yang nilainya 20 kV untuk distribusi primer dan 380 V untuk distribusi sekunder. Jaringan sistem tenaga listrik dapat dilihat pada Gambar 2.1.
Gambar 2.1 Sistem distribusi tenaga listrik
2.2 Point of Common Coupling (PCC)
Menurut IEEE 519, PCC merupakan titik terdekat pada sisi utilitas dari pelayanan pelanggan dimana pelanggan lain juga disuplai dari titik itu. Dalam praktiknya, PCC paling sering berada pada tegangan menengah transformator yang melayani pelanggan, terlepas dari kepemilikan transformator atau lokasi pengukuran[16]. Penentuan PCC ditunjukkan pada Gambar 2.2 :
Gambar 2.2 Point of Common Coupling (PCC) 2.3 Kualitas Daya Listrik
Kualitas daya atau power quality merupakan aspek yang memberikan gambaran kemampuan suatu sistem dalam menyalurkan daya ke konsumen secara kontinu sehingga peralatan listrik konsumen dapat beroperasi dengan normal.
Beberapa hal yang membuat perlu diperhatikannya kualitas daya listrik, yaitu karena peralatan listrik semakin sensitif pada gangguan kualitas daya dan juga pengaruh dari peralatan listrik yang semakin besar menyebabkan gangguan kualitas daya.
Gangguan kualitas daya sangat berpengaruh pada industri. Hal ini dikarenakan industri merupakan konsumen yang banyak menggunakan peralatan listrik yang sensitif pada gangguan kualitas daya. Oleh karena itu, gangguan kualitas daya dapat menyebabkan kerugian finansial yang besar pada industri
karena kerusakan peralatan, kerugian produksi, pemborosan bahan baku, kehilangan data penting, dan sebagainya. Gangguan kualitas daya juga mempengaruhi sistem proteksi sehingga dapat menyebabkan mal-operasi pada peralatan proteksi.
Gangguan kualitas daya disebabkan secara natural dan man made.
Gangguan yang disebabkan secara natural biasanya terdiri dari kesalahan (fault), sambaran petir, kondisi cuaca seperti badai, kerusakan peralatan, dan sebagainya.
Sedangkan gangguan yang disebabkan man made biasanya berhubungan dengan beban yang non linier dan operasi sistem [1].
Gangguan kualitas daya diklasifikasikan sebagai berikut [8]:
1. Transien
Transien merupakan peralihan yang terjadi dengan waktu yang sangat pendek dari keadaan operasi yang tak diinginkan menjadi keadaan tunak. Transien dibedakan menjadi dua kategori, yaitu:
Impulsi
Osilator
2. Variasi tegangan durasi pendek
Gangguan ini terjadi ketika penyimpangan tegangan dengan durasi antara 0,5 siklus sampai dengan 1 menit. Gangguan ini dibagi tiga, yaitu:
Interupsi pendek : Penurunan tegangan sementara dengan magnitude <0,1 pu dengan durasi <0,5 siklus
Kedip tegangan: Penurunan tegangan sementara dengan magnitude 0,1 sampai dengan 0,9 pu dengan durasi 0,5 siklus sampai 1 menit seperti yang ditunjukkan Gambar 2.3.
Swell: Kenaikan tegangan sementara dengan magnitude > 1,1 pu dengan durasi 0,5 siklus sampai 1 menit
Gambar 2.3 Gangguan tegangan berdasarkan durasi dan magnitudenya
3. Variasi tegangan durasi panjang
Gangguan ini terjadi ketika penyimpangan tegangan dengan durasi lebih satu menit. Gangguan ini terdiri dari:
Overvoltage
Undervoltage
Interupsi berlanjut 4. Tegangan tak seimbang 5. Distorsi gelombang 6. Fluktuasi tegangan.
7. Variasi frekuensi daya
2.4 Kedip Tegangan
Kedip tegangan merupakan penurunan tegangan sementara dengan nilai 0,1 pu sampai dengan 0,9 dalam frekuensi daya yang berdurasi 0,5 cycle sampai dengan 1 menit. Kedip tegangan biasanya terjadi karena gangguan hubung singkat pada sistem transmisi atau sistem distribusi. Karakteristik kedip tegangan dapat dilihat pada Gambar 2.4.
Gambar 2.4 Karakteristik kedip tegangan
Berdasarkan standar IEEE 1159-1995, kedip tegangan atau voltage sag/dip merupakan penurunan nilai rms tegangan yang bernilai antara 0,1 sampai 0,9 pu dari tegangan normal dengan durasi 0,5 cycle sampai 1 menit [11].
2.4.1 Durasi Kedip Tegangan
Durasi kedip tegangan bergantung pada waktu operasi peralatan proteksi untuk memutus rangkaian yang mengalami gangguan hubung singkat. Relai proteksi dirancang dengan memiliki karakteristik inverse time , semakin rendah arus hubung singkat maka semakin lama waktu operasi relai proteksi. Oleh karena itu, durasi kedip tegangan sangat dipengaruhi oleh besar arus hubung singkat yang terjadi.
Durasi kedip tegangan akibat gangguan hubung singkat juga dipengaruhi oleh arus inrush motor yang cukup besar karena ketika gangguan hubung singkat diisolir maka arus inrush motor akan memperlambat pemulihan tegangan, sehingga memperlama durasi kedip tegangan.
2.4.2 Magnitude Kedip Tegangan
Pada Gambar 2.5 ditunjukkan skema terjadi kedip tegangan karena gangguan hubung singkat. Besar magnitude kedip tegangan tergantung pada jarak lokasi gangguan penyebab kedip, kekuatan (kapasitas) pasokan daya, hubungan trafo, jenis gangguan, sistem pentanahan, tegangan pragangguan, dll.
Gambar 2.5 Kedip tegangan pada bus PCC
Besarnya magnitude kedip tegangan ( ) yang terjadi pada bus PCC dinyatakan seperti pada Persamaan 2.1 [12,13].
= 2.1
: Impedansi dari bus PCC ke titik gangguan (pu)
: Impedansi dari panjang saluran/jaringan distribusi dari trafo sampai bus PCC (pu)
: Impedansi dari sumber (pu)
: Tegangan yang dikirim sumber (pu)
: Impedansi transformator (pu)
2.4.3 Penyebab Kedip Tegangan
Beberapa faktor yang dapat menyebabkan munculnya kedip tegangan pada sistem kelistrikan adalah [14]:
a. Gangguan hubung singkat, baik yang terjadi di instalasi ataupun yang terjadi di penyulang.
b. Surja alih hubung akibat pengoperasian pemutus tenaga di saluran transmisi atau distribusi.
c. Perubahan beban yang cukup besar secara tiba-tiba.
d. Karakteristik pembebanan konsumen, seperti starting motor berkapasitas besar. Ketika starting motor induksi akan menarik arus sebesar lima sampai tujuh kali arus beban penuh. Arus yang ditarik ini akan menyebabkan jatuh tegangan. Jika arus sangat besar maka kedip tegangan yang terjadi akan sangat signifikan.
e. Energizing Transformator 2.5 Klasifikasi Kedip Tegangan
Kedip tegangan dapat diklasifikasi berdasarkan penggandaannya menjadi dua, yaitu kedip tegangan tunggal dan kedip tegangan ganda. Dimana kedip tegangan tunggal merupakan kedip tegangan yang terjadi sekali pada bus pcc sedangkan kedip tegangan ganda merupakan kedip tegangan yang terjadi berulang kali pada bus pcc.
2.5.1 Kedip Tegangan Tunggal
Kedip tegangan tunggal terjadi karena gangguan hubung singkat yang terjadi pada sistem diisolir oleh CB. Durasi kedip tegangan tunggal bergantung pada setting waktu CB. Bentuk gelombang kedip tegangan tunggal dapat dilihat pada Gambar 2.6.
Gambar 2.6 Bentuk gelombang kedip tegangan tunggal [10]
2.5.2 Kedip Tegangan Ganda
Kedip tegangan ganda terjadi karena adanya recloser pada sisi gangguan..
Penutupan otomatis pada recloser bertujuan untuk mengatasi pemadaman listrik apabila gangguan bersifat sesaat. Tetapi ketika gangguan bersifat permanen, recloser akan mengakibatkan kedip tegangan ganda [15,17]. Dimana durasi dan penggandaannya bergantung pada setting waktu pada recloser dan jumlah membuka-menutupnya recloser sebelum lock out. Skema terjadinya kedip tegangan ganda ditunjukkan pada Gambar 2.7. Kedip tegangan ganda memiliki bentuk gelombang seperti yang ditunjukkan pada Gambar 2.8.
V (%)
Gambar 2.7 Mekanisme terjadinya kedip tegangan ganda pada bus PCC
Gambar 2.8 Bentuk gelombang kedip tegangan ganda [2]
2.6 Motor Induksi
Motor induksi bekerja berdasarkan induksi elektromagnetik dari kumparan stator pada kumparan rotornya. Motor induksi disebut juga dengan motor asinkron. Hal ini dikarenakan kecepatan medan putar motor induksi tidak sama dengan kecepatan putar rotor. Motor ini memiliki kelebihan, yaitu berbentuk sederhana, harga yang murah, dan mudah untuk dilakukan perawatan.
Motor induksi berdasarkan rotornya terdiri dari dua jenis, yaitu motor induksi rotor sangkar dan motor induksi rotor belitan. Motor induksi sangkar tupai
lebih banyak digunakan karena konstruksi yang lebih sederhana dan murah dari motor induksi rotor belitan. Rotor belitan dilengkapi cincin slip yang terpasang pada poros motor sehingga rotor belitan dapat terpasang tahanan luar yang dapat diatur supaya motor menghasilkan kopel mula yang besar dan juga untuk membatasi arus starting motor.
2.6.1 Konstruksi Motor Induksi
Motor induksi memiliki dua bagian utama yaitu stator yang tak bergerak dan rotor berputar. Rotor terpisah dari stator dengan celah udara yang kecil sekitar 0,4 mm sampai dengan 4 mm, bergantung pada kapasitas motor induksi. Stator terdiri dari rangka stator, inti stator, bearing, dan belitan stator (belitan jangkar). Rotor terdiri atas rotor sangkar, poros rotor.
Konstruksi motor induksi lebih sederhana dibanding dengan motor DC, dikarenakan tidak ada komutator dan tidak ada sikat arang. Sehingga pemeliharaan motor induksi hanya bagian mekanik saja, dan konstruksinya yang sederhana motor induksi sangat handal. Bagian motor induksi yang perlu dipelihara rutin adalah pelumasan bearing, dan pemeriksaan kekencangan baut- baut kabel pada terminal box.
2.6.2 Prinsip Kerja Motor Induksi
Prinsip kerja motor induksi berdasarkan pada aplikasi Hukum Faraday dan gaya Lorentz pada konduktor. Prinsip kerja motor induksi sebagai berikut:
1. Ketika sumber tegangan tiga fasa dipasang pada kumparan stator, maka akan timbul medan putar.
2. Medan putar stator tersebut akan memotong batang konduktor pada rotor
3. Akibatnya pada kumparan rotor timbul induksi tegangan (ggl) E2
dinyatakan dalam Persamaan 2.2 :
E2=4,44.f2.N2.ϕ 2.2
N2 : Jumlah lilitan Φ : Fluks magnet (Wb)
4. Karena kumparan rotor merupakan rangkaian yang tertutup, ggl (E) akan menghasilkan arus (I)
5. Adanya arus didalam medan magnet menimbulkan gaya pada motor 6. Bila kopel mula dihasilkan oleh gaya (F) pada rotor cukup besar untuk
memikul kopel beban, rotor akan berputar searah dengan medan putar stator
7. Tegangan induksi timbul karena terpotongnya batang konduktor rotor oleh medan putar stator. Oleh karena itu, untuk menimbulkan tegangan induksi maka diperlukan adanya perbedaan relatif antara kecepatan medan putar stator (ns) dengan kecepatan putar rotor (nr)
8. Perbedaan kecepatan antara ns dan nr disebut slip (s) dinyatakan dengan Persamaan 2.3:
100% 2.3
ns : Kecepatan medan stator nr : Kecepatan medan rotor
9. Bila nr=ns, tegangan tidak akan terinduksi dan arus mengalir pada kumparan jangkar (rotor), dengan demikian tidak dihasilkan kopel.
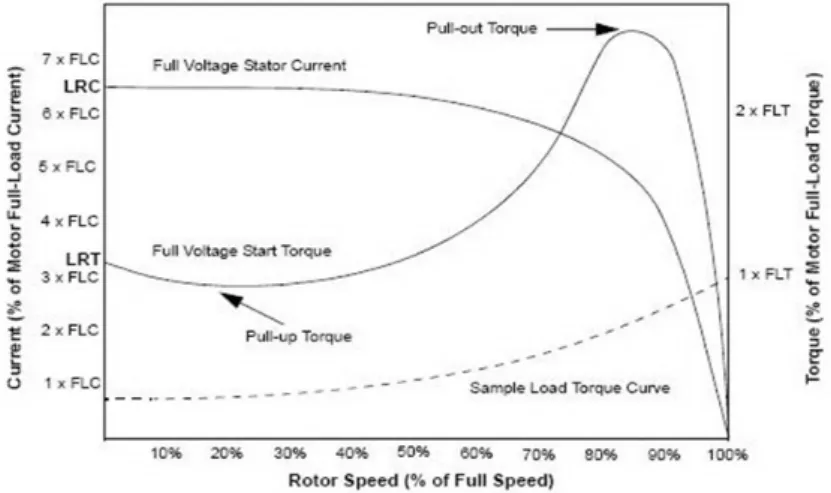
Kopel motor akan ditimbulkan apabila nr lebih kecil dari ns 2.6.3 Karakteristik Motor Induksi
Motor induksi mempunyai karakteristik seperti pada Gambar 2.9. Dari gambar diperoleh bahwa ketika motor start maka dibutuhkan arus yang tinggi untuk menjalankan motor induksi sehingga untuk motor yang berkapasitas besar maka diperlukan metode pengasutan supaya mengurangi arus starting.
Gambar 2.9 Karakteristik motor induksi 2.6.4 Rangkaian Ekivalen Motor Induksi
Untuk mempermudah analisa pada motor induksi, maka digunakan metode rangkaian ekivalen perfasa. Motor induksi dapat berbentuk seperti transformator apabila rotornya diblok. Rangkaian ekivalen motor induksi ditunjukkan pada Gambar 2.10.
Gambar 2.10 Rangkaian ekivalen motor induksi Keterangan:
R1 : Resistansi kumparan stator (Ω) R’2 : Resistansi kumparan rotor (Ω) X1 : Reaktansi kumparan stator (Ω) X’2 : Reaktansi kumparan rotor (Ω) RC : Resistansi inti (Ω)
XM : Reaktansi inti (Ω) V1 : Tegangan Sumber (V)
E1 : GGL induksi stator (V) E2 : GGL induksi rotor (V) I1 : Arus kumparan stator (A) I’2 : Arus kumparan rotor (A) I0 : Arus Magnetisasi (A) s : Slip
2.7 Torsi Beban Motor Induksi
Ada empat jenis torsi beban motor induksi yaitu:
1. Torsi beban variabel 2. Torsi beban konstan 3. Torsi beban linear 4. Torsi bebab inverse
R2
2.7.1 Torsi Beban Variabel
Torsi lebih rendah ketika kecepatan rendah dibandingkan ketika kecepatan tinggi. Torsi beban variabel meningkat sebanding dengan kuadrat dari peningkatan kecepatan. Hal ini ditunjukkan pada Gambar 2.11. Contoh torsi beban variabel, yaitu pompa, ventilator, dan kompresor.
Gambar 2.11 Torsi beban variabel 2.7.2 Torsi Beban Konstan
Torsi sama ketika kecepatan rendah maupun tinggi. Torsi beban konstan sama disetiap kecepatan, namun daya meningkat berbanding lurus dengan kecepatan. Hal ini ditunjukkan pada Gambar 2.12. Contoh torsi beban konstan, yaitu konveyor.
Gambar 2.12 Torsi beban konstan Torque
Power
2.7.3 Torsi Beban Linear
Torsi lebih rendah ketika kecepatan rendah dibandingkan ketika kecepatan tinggi. Torsi beban linear memiliki torsi yang linear terhadap kecepatan. Hal ini ditunjukkan pada Gambar 2.13. contoh torsi beban linear, seperti mixer.
Gambar 2.13 Torsi beban linear 2.7.4 Torsi Beban Inverse
Torsi lebih besar ketika kecepatan rendah dibandingkan ketika kecepatan tinggi. Torsi beban inverse berbanding terbalik dengan kecepatan, namun memiliki daya yang konstan. Hal ini ditunjukkan pada Gambar 2.14. Contoh torsi beban inverse, yaitu mesin bubut dan mesin penggulung.
Gambar 2.14 Torsi beban inverse Torque
Power
Power
Torque
2.8 Pengaruh Kedip Tegangan pada Torsi, Kecepatan, dan Arus Motor Induksi
Hubungan kedip tegangan pada torsi motor induksi dapat dilihat pada Persamaan 2.4.
Tm= 3 . 1′ . 2.4
: Kedip tegangan (V)
Tm : Torsi mekanik yang dibangkitkan motor (Nm)
: Kecepatan putar rotor (rad/s)
Pag : Daya yang melewati celah udara (w)
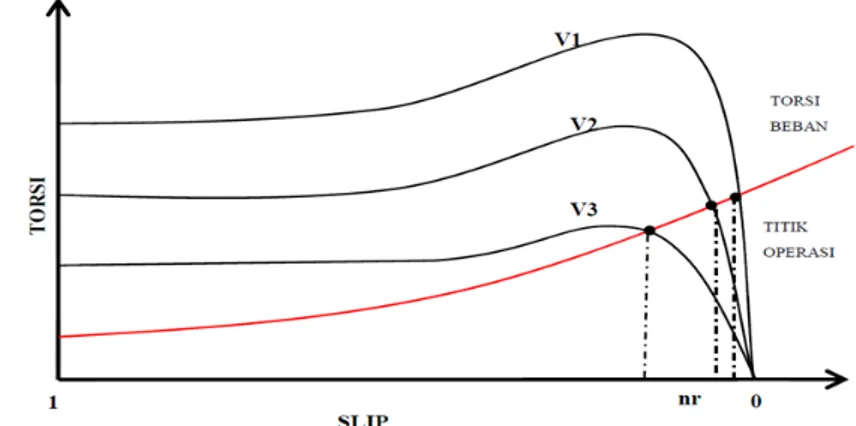
Dari Persamaan 2.4 diketahui torsi sangat dipengaruhi tegangan dan slip motor sehingga dapat diperoleh bahwa semakin kecil magnitude kedip tegangan maka semakin kecil torsi yang dihasilkan motor induksi ditunjukkan pada Gambar 2.15.
Gambar 2.15 Pengaruh kedip tegangan terhadap torsi motor induksi Dari Gambar 2.15 juga dapat diperoleh bahwa ketika kedip tegangan maka akan terjadi perubahan slip motor. Sehingga perubahan slip akan mempengaruh
kecepatan motor induksi seperti ditunjukkan pada persamaan 2.5. Dimana semakin kecil magnitude kedip tegangan maka semakin kecil kecepatan motor induksi dan semakin besar kedip tegangan maka semakin besar kecepatan motor induksi.
1 2.5
: Kecepatan putar stator (rad/s)
Dari rangkaian ekivalen motor pada Gambar 2.10 maka arus yang mengalir ke motor induksi dapat diperoleh pada Persamaan 2.9.
2.6
2.7
2.8
Sehingga :
I1= 2.9
: Kedip tegangan (V) : Impedansi stator(Ω) : Impedansi rotor(Ω)
: Impedansi pararel rotor dan inti(Ω) : Impedansi inti(Ω)
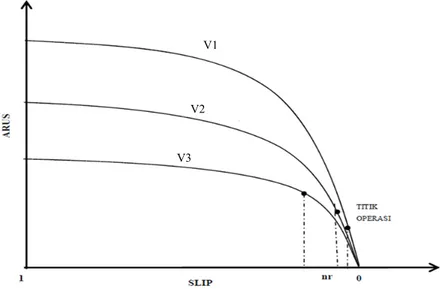
Gambar 2.16 Pengaruh kedip tegangan arus motor induksi
Pada Persamaan 2.9 diketahui bahwa arus dipengaruhi oleh kedip tegangan dan slip motor. Sehingga diperoleh pengaruh kedip tegangan pada arus motor induksi ditunjukkan pada Gambar 2.16.
2.9 Alternative Transients Program
ATP termasuk salah satu program yang digunakan secara luas untuk simulasi digital fenomena elektromagnetik transien serta sifat elektromekanis dalam sistem tenaga listrik. Dengan program digital ini, sistem jaringan dan kontrol yang kompleks dapat disimulasian. ATP memiliki pemodelan yang luas dengan fitur-fitur penting untuk melakukan simulasi.
ATP memiliki banyak model meliputi mesin listrik, transformator, arrester surja, saluran transmisi dan kabel. Beberapa penelitian yang dapat dilakukan dengan software ini adalah :
Tegangan lebih akibat sambaran petir dan mekanisme switching peralatan stabilitas transien
Analisis harmonisa dan resonansi
V1
V2
V3
Unjuk kerja peralatan FACTS: STATCOM, SVC, UPFC, TCSC
Pengujian peralatan proteksi, dan lain-lain
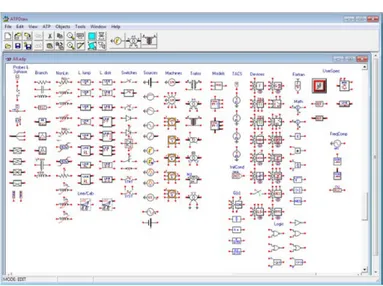
Pada Gambar 2.17 menunjukkan semua komponen terdapat pada software ATP Draw. Komponen-komponen ini meliputi 12 menu komponen utama yaitu trafo, sumber, motor, sakelar, probe dan lain-lain.
Gambar 2.17 Program ATP Draw dan komponennya
BAB III
METODE PENELITIAN
3.1 Waktu dan Tempat Penelitian
Penelitian ini akan dilakukan di Departemen Teknik Elektro Fakultas Teknik Universitas Sumatera Utara dengan menggunakan bantuan perangkat lunak ATP Draw Versi 6.1 pada komputer.
3.2 Data-data yang Diperlukan
Adapun data-data yang diperlukan untuk melakukan penelitian ini adalah berupa data:
1. Single line diagram sistem distribusi industri beserta parameternya[7]
2. Spesifikasi beberapa motor induksi 3.3 Variabel yang Diamati
Variabel-variabel yang diamati dalam penelitian ini meliput\i : 1. Profil tegangan pada sistem
2. Torsi motor induksi 3. Kecepatan motor induksi 4. Arus motor induksi 3.4 Prosedur Penelitian
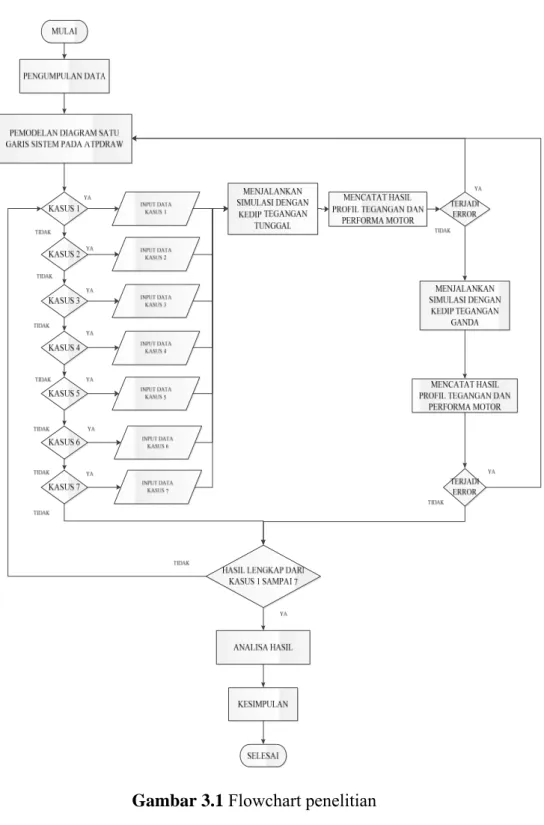
Prosedur yang dilakukan dalam penelitian ini ditunjukkan oleh flowchart pada Gambar 3.1.
Gambar 3.1 Flowchart penelitian
Adapun langkah-langkah yang harus dilakukan selama melakukan penelitian ilmiah adalah sebagai berikut:
1. Pengumpulan Data
Data yang dibutuhkan diperoleh dari data sistem yang tertera pada salah satu jurnal IEEE[7], katalog motor induksi merk Toshiba, dan katalog motor induksi merk Siemens.
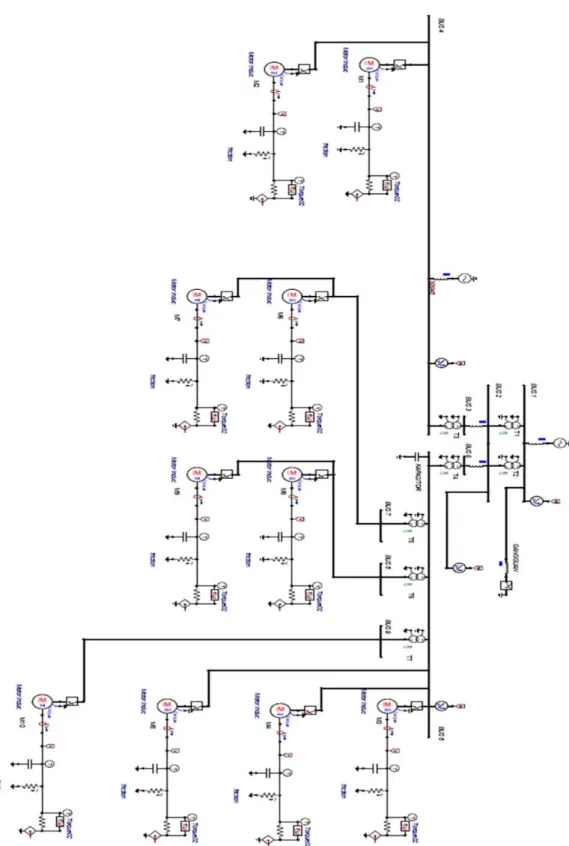
2. Pemodelan Sistem Kelistrikan Distribusi Industri
Single line diagram sistem kelistrikan distribusi industri yang digunakan dalam penelitian ini seperti Gambar 3.2. Kemudian akan dimodelkan ke dalam software ATP Draw Versi 6.1.
Gambar 3.2 Sistem distribusi industri
3. Menginput Data
Data yang dikumpulkan kemudian diinput ke dalam sistem untuk disimulasikan. Berikut ini adalah data-data yang akan dimasukan ke dalam sistem.
a. Single Line Diagram
Data parameter sumber daya, transformator , konduktor, dan kapasitor bank sistem distribusi industri ditunjukkan pada Tabel 3.1 berikut ini.
Tabel 3.1a Parameter Single Line Diagram
Tabel 3.1b Konduktor
Dari Bus Ke Bus X
2 3 0.064Ω
2 5 0.048Ω
Tabel 3.1c Kapasitor Bank
Bus Mvar 6 4.3
b. Motor Induksi
Motor induksi merupakan beban yang digunakan dalam sistem. Sistem akan dibebani motor berkapasitas besar yaitu diatas 1000kw dan motor berkapasitas kecil yaitu ≤ 1000kw. Motor akan dipasang beban dengan momen inersia kecil, sedang, dan besar dengan nilai masing-masing yaitu <65%, 65% sampai 75%, dan
>75% dari momen inersia ekternal maksimum. Data motor induksi yang digunakan dalam penelitian ini ditunjukkan pada Tabel 3.2. Sistem akan dibebani
Komponen SB VB ZB
Utility 2100MVA 132kV
T1=T2 35MVA 132/22kV X=12.5%
T3 11.5MVA 22/6.6kV X=9.72%
STG 10.25MVA 6.6kV Xd=25%
T4 23MVA 22/6.6kV X=9.49%
T5=T6 2MVA 6.6/0.435kV X=6%
T7 1MVA 6.6/0.435kV X=6%
oleh variasi motor induksi yang dibedakan menjadi beberapa kasus ditunjukkan pada Tabel 3.3.
Tabel 3.2 Data Motor Induksi
Daya Output
(kW)
Tegangan (V) Arus
(A) Speed
(rpm) Cos φ Efisiensi (%) Torsi
(Nm) Tmax/Trated TLR/Trated ILR/Irated
Momen Inersia Motor (Kgm2)
External Max (Kgm2) 250 435 425 2986 0,88 96,5 800 4,2 3 9,3 2,82 30 1005 435 950 2988 0,9 97,4 3200 2,7 1,2 7 7 60 1000 6600 115 2955 0,88 95,2 3232 2 1 6,5 12 61 4000 6600 446 2970 0,89 97,1 12861 2 0,6 5 49 128 5000 6600 557 2970 0,89 97,2 16076 1,8 0,6 4,5 83 133 6000 6600 666 2970 0,89 97,4 19292 1,7 0,6 4,5 83 133
Tabel 3.3 Variasi Beban Sistem
Bus Motor
Kasus 1 Kasus 2 Kasus 3 Kasus 4 Kasus 5 Kasus 6 Kasus 7
P(kW) Jbeban
(Kgm2) P(kW) Jbeban
(Kgm2) P(kW) Jbeban
(Kgm2) P(kW) Jbeban
(Kgm2) P(kW) Jbeban
(Kgm2) P(kW) Jbeban
(Kgm2) P(kW) Jbeban
(Kgm2)
4 M1 4000 80 4x1000 40 4000 120 4000 60 4000 80 4000 80 4000 80 M2 6000 80 6x1000 40 6000 120 6000 60 6000 80 6000 80 6000 80 6
M3 4000 80 4x1000 40 4000 120 4000 60 5000 60 5000 120 4000 80 M4 5000 80 5x1000 40 5000 120 5000 60 5000 80 5000 120 5000 80 M5 6000 80 6x1000 40 6000 120 6000 60 5000 120 5000 120 6000 80 7 M6 1005 45 4x250 20 1005 60 1005 20 1005 45 1005 45 1005 45 M7 1005 45 4x250 20 1005 60 1005 20 1005 45 1005 45 1005 45 8 M8 1005 45 4x250 20 1005 60 1005 20 1005 45 1005 45 1005 45
M9 1005 45 4x250 20 1005 60 1005 20 1005 45 1005 45 1005 45 9 M10 1005 45 4x250 20 1005 60 1005 20 1005 45 1005 45 1005 45
Setiap motor induksi akan dibebani sebesar 85% dari ratingnya. Pada kasus 1 sampai kasus 6 semua motor akan dibebani torsi variabel, kecuali motor M4 dan M5 pada kasus 6 yang yang masing-masing dibebani torsi linear dan torsi konstan, begitu juga semua motor pada kasus 7 yang akan dibebani torsi konstan.
Simulasi akan dilakukan dengan sistem dibebani oleh kasus 1 sampai 7, setiap kasus digunakan masing-masing sebagai berikut:
Kasus 1 digunakan untuk simulasi pengaruh kedip tegangan pada profil tegangan sistem dibebani beberapa motor berkapasitas besar dan simulasi pengaruh kedip tegangan pada performa motor berkapasitas berbeda.
Kasus 2 digunakan untuk simulasi pengaruh kedip tegangan pada profil tegangan sistem yang dibebani beberapa motor berkapasitas kecil
Kasus 3 digunakan untuk simulasi pengaruh kedip tegangan pada profil tegangan sistem yang dibebani beberapa motor dengan momen inersia beban besar
Kasus 4 digunakan untuk simulasi pengaruh kedip tegangan pada profil tegangan sistem yang dibebani beberapa motor dengan momen inersia beban kecil
Kasus 5 digunakan untuk simulasi pengaruh kedip tegangan pada performa motor dengan momen inersia beban berbeda
Kasus 6 digunakan untuk simulasi pengaruh kedip tegangan pada performa motor dengan torsi beban variabel, linear, dan konstan
Kasus 7 digunakan untuk simulasi pengaruh kedip tegangan pada profil tegangan sistem yang dibebani beberapa motor dengan torsi beban konstan
4. Menjalankan Simulasi
Simulasi dilakukan dengan memberi gangguan 3 fasa pada bus 1 dengan waktu 500 ms yang menghasilkan kedip tegangan dengan magnitude 0.136 pu pada bus 2. Kedip tegangan yang dihasilkan terbagi menjadi dua, yaitu:
a. Kedip Tegangan Tunggal
Simulasi kedip tegangan tunggal dilakukan dengan mengisolir gangguan menggunakan CB. Setelah simulasi dijalankan, lalu dicatat output sebagai hasil simulasi yaitu arus, torsi, kecepatan motor induksi dan profil tegangan.
b. Kedip Tegangan Ganda
Simulasi kedip tegangan ganda dilakukan dengan mengisolir gangguan menggunakan recloser. Setelah simulasi dijalankan, lalu dicatat output sebagai hasil simulasi yaitu arus, torsi, kecepatan motor induksi dan profil tegangan.
5. Menganalisa Hasil Simulasi
Setelah dilakukan simulasi dan diperoleh hasil lengkap dari kasus 1 sampai 7, kemudian dilakukan analisa hasil dengan membandingkan hasil simulasi kedip tegangan tunggal dengan kedip tegangan ganda.
6. Membuat Kesimpulan
Kesimpulan diperoleh dari analisa hasil yaitu membandingkan pengaruh kedip tegangan tunggal dan ganda pada arus, torsi, kecepatan motor induksi, dan profil tegangan.
BAB IV
HASIL PENELITIAN DAN PEMBAHASAN
4.1 Pemodelan Sistem Kelistrikan Distribusi Industri
Pemodelan sistem kelistrikan distribusi industri dilakukan dengan software ATP DRAW 6.1 dengan memperhatikan data-data peralatan listrik yang meliputi sumber utilitas, Distribution Generator (DG), transformator, konduktor dan beban berupa beberapa variasi motor induksi. Pemodelan single line diagram sistem kelistrikan distribusi industri ditunjukkan pada Gambar 4.1.
4.2 Simulasi Kedip Tegangan
Simulasi dilakukan dengan memberi gangguan 3 fasa pada bus 1 pada detik ke 5,5. Kemudian gangguan diisolir oleh CB dengan waktu 500 ms sehingga menghasilkan kedip tegangan tunggal dengan magnitude 0.136 pu pada bus 2.
Dimana sebelum terjadi kedip tegangan, besar tegangan pada bus 2 yaitu 22,07kV. Simulasi kedip tegangan tunggal akan dilakukan dengan variasi motor induksi yang dibedakan menjadi beberapa kasus yaitu kasus 1 sampai 7.
Kemudian untuk menghasilkan kedip tegangan ganda pada bus 2 maka gangguan diisolir oleh recloser. Recloser melakukan sekali penutupan kembali dengan deadtime 5 detik sehingga gangguan akan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5. Simulasi kedip tegangan ganda juga akan dilakukan dengan variasi motor induksi kasus 1 sampai dengan kasus 7.
Hasil dari simulasi pengaruh kedip tegangan tunggal dan ganda pada setiap motor yang terpasang pada sistem untuk kasus 1 sampai 7 dapat kita lihat pada bagian lampiran.
Gambar 4.1 Pemodelan sistem distribusi industri pada program ATP Draw
4.3 Pengaruh Kedip Tegangan pada Performa Motor yang Berkapasitas Berbeda
Ketika sistem dibebani variasi motor induksi kasus 1, maka pada bus 6 akan dibebani tiga motor yaitu M3 4000hp, M4 5000hp, dan M5 6000hp. Ketiga motor dibebani 85% dengan momen inersia beban 60 KgM2. Oleh karena itu, untuk menunjukkan pengaruh kedip tegangan pada performa motor yang berkapasitas berbeda dapat dilakukan.
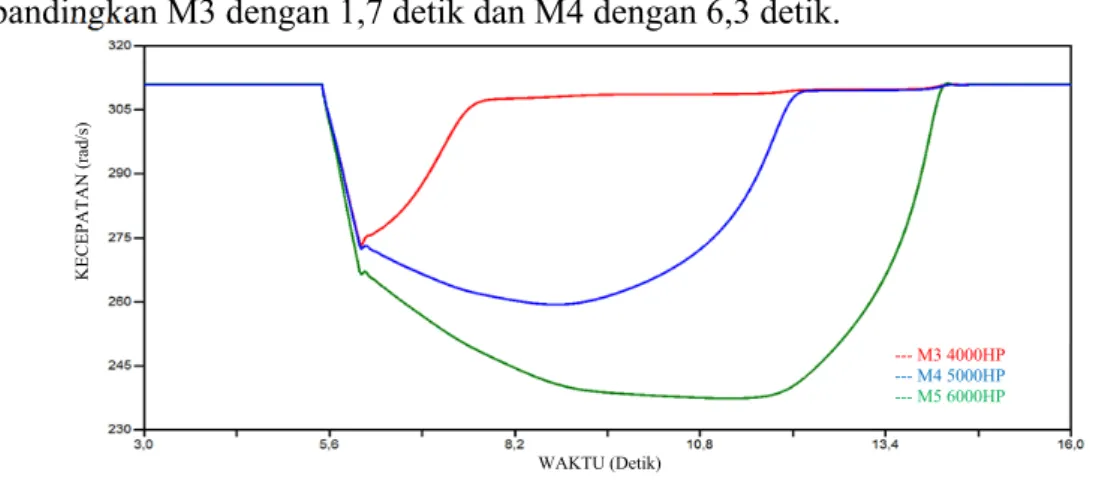
Pengaruh kedip tegangan tunggal pada kecepatan motor yang berkapasitas berbeda ditunjukkan oleh kurva pada Gambar 4.2.Pada kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan kecepatan. Penurunan kecepatan ketika gangguan paling tajam dialami oleh motor M5 dengan kecepatan 266,43 rad/s dibandingkan M3 dengan kecepatan 273,8 rad/s dan M4 dengan kecepatan 272,32 rad/s. Ketiga motor berhasil mengalami pemulihan kecepatan ke kecepatan semula. Motor M5 mengalami pemulihan kecepatan 8,2 detik yang lebih lama dibandingkan M3 dengan 1,7 detik dan M4 dengan 6,3 detik.
Gambar 4.2 Pengaruh kedip tegangan tunggal pada kecepatan motor induksi yang berkapasitas berbeda
KECEPATAN (rad/s)
WAKTU (Detik)
--- M3 4000HP --- M4 5000HP --- M5 6000HP
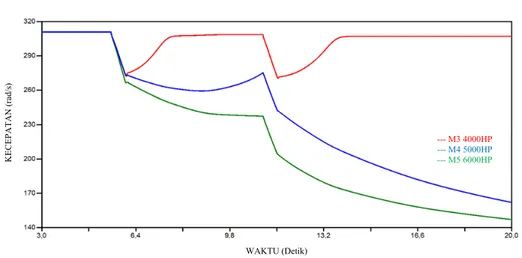
Pengaruh kedip tegangan ganda pada kecepatan motor yang berkapasitas berbeda ditunjukkan oleh kurva pada Gambar 4.3. Pada kurva terlihat bahwa ketika kedip tegangan ganda akibat gangguan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5 menyebabkan motor mengalami penurunan kecepatan secara berulang. Motor M3 merupakan motor berkapasitas lebih kecil dibandingkan M4 dan M5. Motor M3 berhasil mengalami pemulihan kecepatan dengan waktu 3,5 detik, sedangkan motor M4 dan M5 tidak dapat mengalami pemulihan kecepatan bahkan terus menerus mengalami penurunan kecepatan hingga motor mengalami stalling.
Gambar 4.3 Pengaruh kedip tegangan ganda pada kecepatan motor induksi yang berkapasitas berbeda
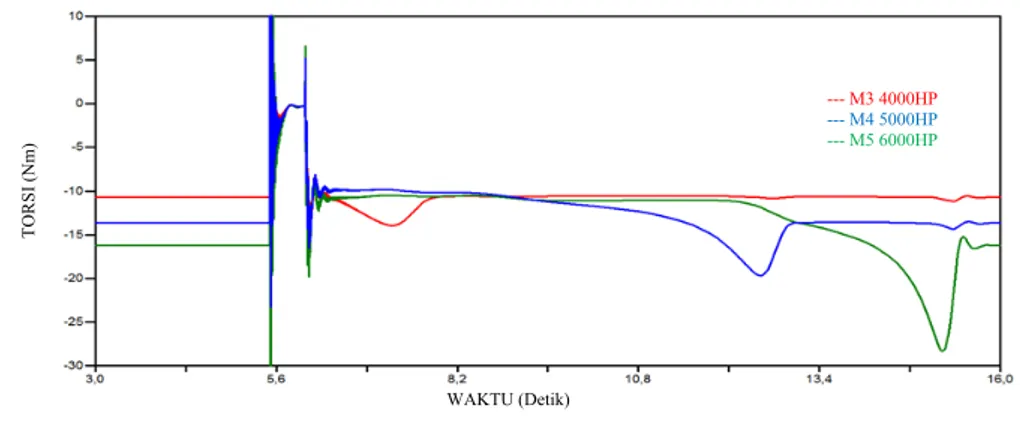
Pengaruh kedip tegangan tunggal pada torsi motor yang berkapasitas berbeda ditunjukkan oleh kurva pada Gambar 4.4. Pada kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan torsi. Pada kondisi pemulihan kecepatan atau motor berakselerasi maka terjadi pemulihan torsi juga sampai kecepatan kembali pulih. pemulihan torsi lebih lama dialami oleh M5 dengan
KECEPATAN (rad/s)
WAKTU (Detik)
--- M3 4000HP --- M4 5000HP --- M5 6000HP
waktu 8,2 detik dibandingkan dengan motor M3 dengan 1,7 detik dengan dan M4 dengan waktu 6,3 detik sesuai dengan lama pemulihan kecepatannya.
Gambar 4.4 Pengaruh kedip tegangan tunggal pada torsi motor induksi yang berkapasitas berbeda
Pengaruh kedip tegangan ganda pada torsi motor yang berkapasitas berbeda ditunjukkan oleh kurva pada Gambar 4.5. Pada kurva terlihat bahwa ketika kedip tegangan ganda akibat gangguan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5 menyebabkan motor mengalami penurunan torsi secara berulang.
Motor M3 merupakan motor berkapasitas lebih kecil dibandingkan M4 dan M5.
Motor M3 mengalami pemulihan torsi dengan waktu 3,5 detik, sedangkan motor M4 dan M5 mengalami stalling sehingga motor akan menghasilkan torsi rotor terblok.
Gambar 4.5 Pengaruh kedip tegangan ganda pada torsi motor induksi yang berkapasitas berbeda
TORSI (Nm)
WAKTU (Detik)
--- M3 4000HP --- M4 5000HP --- M5 6000HP
TORSI (Nm)
WAKTU (Detik)
--- M3 4000HP --- M4 5000HP --- M5 6000HP
Pengaruh kedip tegangan tunggal pada arus motor yang berkapasitas berbeda ditunjukkan oleh kurva pada Gambar 4.6. Pada kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan arus. Pada saat kondisi pemulihan kecepatan maka terjadi peningkatan arus selama motor berakselerasi dan arus kembali seperti semula ketika kecepatan pulih. Peningkatan arus tertinggi yang dialami motor M3, M4, dan M5 masing-masing secara berurutan, yaitu 1123A, 1528A, dan 2073A. Peningkatan arus lebih lama dialami motor M5 dengan waktu 8,2 detik dibandingkan dengan motor M3 dengan waktu 1,7 detik dan M4 dengan waktu 6,3 detik sesuai dengan waktu pemulihan kecepatan.
Gambar 4.6 Pengaruh kedip tegangan tunggal pada arus motor induksi yang berkapasitas berbeda
Pengaruh kedip tegangan ganda pada arus motor yang berkapasitas berbeda ditunjukkan oleh kurva pada Gambar 4.7. Pada kurva terlihat bahwa ketika kedip tegangan ganda akibat gangguan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5 menyebabkan motor mengalami penurunan arus secara berulang.
Motor M3 merupakan motor berkapasitas lebih kecil dibandingkan M4 dan M5.
Motor M3 mengalami pemulihan arus dengan waktu 3,5 detik. Besar arus sedikit
ARUS (Ampere)
WAKTU (Detik)
--- M3 4000HP --- M4 5000HP --- M5 6000HP
mengalami peningkatan karena motor M4 dan M5 mengalami stalling. Motor M4 dan M5 mengalami stalling sehingga motor akan berhenti dengan arus rotor terblok masing-masing yaitu 1498A dan 1810A.
Gambar 4.7 Pengaruh kedip tegangan ganda pada arus motor induksi yang berkapasitas berbeda
4.4 Pengaruh Kedip Tegangan pada Performa Motor dengan Momen Inersia Beban Berbeda
Ketika sistem dibebani variasi motor induksi kasus 5, maka pada bus 6 akan dibebani tiga motor berkapasitas 5000hp dengan momen inersia beban berbeda yaitu M3, M4, dan M5 dengan momen inersia beban masing-masing 60Kgm2, 80Kgm2, dan 120Kgm2 secara berurutan. Oleh karena itu, untuk menunjukkan pengaruh kedip tegangan pada performa motor dengan momen inertia beban berbeda dapat dilakukan.
Pengaruh kedip tegangan tunggal pada kecepatan motor dengan momen inersia beban berbeda ditunjukkan oleh kurva pada Gambar 4.8. Pada kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan kecepatan.
Penurunan kecepatan ketika gangguan paling tajam dialami oleh motor M3
ARUS (Ampere)
WAKTU (Detik)
--- M3 4000HP --- M4 5000HP --- M5 6000HP
dengan kecepatan 268,5 rad/s dibandingkan M4 dengan kecepatan 273,1 rad/s dan M5 dengan kecepatan 279,8 rad/s. Ketiga motor berhasil mengalami pemulihan kecepatan ke kecepatan semula. Motor M3 mengalami pemulihan kecepatan lebih lama dengan waktu 13,7 detik dibandingkan M4 dengan waktu 10,5 detik dan M5 dengan waktu 4,2 detik.
Gambar 4.8 Pengaruh kedip tegangan tunggal pada kecepatan motor induksi dengan momen inersia beban berbeda
Pengaruh kedip tegangan ganda pada kecepatan motor dengan momen inersia beban berbeda ditunjukkan oleh kurva pada Gambar 4.9. Pada kurva terlihat bahwa ketika kedip tegangan ganda akibat gangguan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5 menyebabkan motor mengalami penurunan kecepatan secara berulang. Ketiga motor tidak dapat mengalami pemulihan kecepatan pada kedip tegangan kedua sehingga ketiga motor mengalami stalling. Penurunan kecepatan paling cepat dan lebih awal stalling dialami motor M3 yang memiliki momen inersia beban lebih kecil dibandingkan motor M4 dan M5.
KECEPATAN (rad/s)
WAKTU (Detik)
--- M3 dengan JL=60Kgm2 --- M4 dengan JL=80Kgm2 --- M5 dengan JL=120Kgm2
Gambar 4.9 Pengaruh kedip tegangan ganda pada kecepatan motor induksi dengan momen inersia beban berbeda
Pengaruh kedip tegangan tunggal pada torsi motor dengan momen inersia beban berbeda ditunjukkan oleh kurva pada Gambar 4.10. Pada kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan torsi. Pada kondisi pemulihan kecepatan atau motor berakselerasi maka terjadi pemulihan torsi juga sampai kecepatan kembali pulih. Motor M3 yang memiliki torsi lebih kecil mengalami pemulihan torsi lebih lama dengan waktu 13,7 detik dibandingkan M4 dengan waktu 10,5 detik dan M5 dengan waktu 4,2 detik.
Gambar 4.10 Pengaruh kedip tegangan tunggal pada torsi motor induksi dengan momen inersia beban berbeda
KECEPATAN (rad/s)
WAKTU (Detik)
TORSI (Nm)
WAKTU (Detik)
--- M3 dengan JL=60Kgm2 --- M4 dengan JL=80Kgm2 --- M5 dengan JL=120Kgm2
--- M3 dengan JL=60Kgm2 --- M4 dengan JL=80Kgm2 --- M5 dengan JL=120Kgm2
Pengaruh kedip tegangan ganda pada torsi motor dengan momen inersia beban berbeda ditunjukkan oleh kurva pada Gambar 4.11. Pada kurva terlihat bahwa ketika kedip tegangan ganda akibat gangguan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5 menyebabkan motor mengalami penurunan torsi secara berulang. Motor M5 memiliki momen inersia beban lebih besar dibandingkan M3 dan M4. Ketika kedip tegangan pertama motor M5 berhasil kembali bekerja dengan torsi semula, tetapi ketika kedip tegangan kedua membuat motor M5 mengalami stalling. Ketiga motor mengalami stalling sehingga ketiga motor menghasilkan torsi rotor terblok.
Gambar 4.11 Pengaruh kedip tegangan ganda pada torsi motor induksi dengan momen inersia beban berbeda
Pengaruh kedip tegangan tunggal pada arus motor dengan momen inersia beban berbeda ditunjukkan oleh kurva pada Gambar 4.12. Pada kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan arus. Pada saat kondisi pemulihan kecepatan maka terjadi peningkatan arus selama motor berakselerasi dan arus kembali seperti semula ketika kecepatan pulih. M3 yang memiliki momen inersia beban lebih kecil mengalami pemulihan arus yang lebih lama
TORSI (Nm)
WAKTU (Detik)
--- M3 dengan JL=60Kgm2 --- M4 dengan JL=80Kgm2 --- M5 dengan JL=120Kgm2
dengan waktu 13,7 detik dibandingkan M4 dengan waktu 10,5 detik dan M5 dengan waktu 4,2 detik.
Gambar 4.12 Pengaruh kedip tegangan tunggal pada arus motor induksi dengan momen inersia beban berbeda
Pengaruh kedip tegangan ganda pada arus motor dengan momen inersia beban berbeda ditunjukkan oleh kurva pada Gambar 4.13. Pada kurva terlihat bahwa ketika kedip tegangan ganda akibat gangguan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5 menyebabkan motor mengalami penurunan arus secara berulang. Motor M5 merupakan motor dengan momen inersia lebih besar dibandingkan M3 dan M4. Ketika kedip tegangan pertama M5 dapat pulih dengan sedikit peningkatan arus, tetapi ketika kedip tegangan kedua M5 mengalami stalling. Ketiga motor mengalami stalling sehingga ketiga motor akan berhenti dengan arus rotor terblok.
ARUS (Ampere)
WAKTU (Detik)
--- M3 dengan JL=60Kgm2 --- M4 dengan JL=80Kgm2 --- M5 dengan JL=120Kgm2
Gambar 4.13 Pengaruh kedip tegangan ganda pada arus motor induksi dengan momen inersia beban berbeda
4.5 Pengaruh Kedip Tegangan pada Performa Motor yang Dibebani Torsi Variabel, Linear, dan Kostan
Ketika sistem dibebani variasi motor induksi kasus 6, maka pada bus 6 akan dibebani beberapa motor berkapasitas 5000hp. Dimana Motor M3, M4, dan M5 masing-masing akan dibebani torsi variabel, linear dan konstan. Oleh karena itu, untuk membandingkan pengaruh kedip tegangan pada performa motor yang dibebani oleh torsi variabel, linear, dan konstan dapat dilakukan.
Pengaruh kedip tegangan tunggal pada kecepatan motor yang dibebani torsi beban variabel, linear, dan konstan ditunjukkan oleh kurva pada Gambar 4.14.
Pada kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan kecepatan.
Motor M3 dan M4 yang masing-masing dibebani torsi variabel dan linear mengalami pemulihan kecepatan dengan waktu yaitu 2,6 detik dan 5,4 detik sedangkan motor M5 yang dibebani torsi konstan mengalami stalling.
ARUS (Ampere)
WAKTU (Detik)
--- M3 dengan JL=60Kgm2 --- M4 dengan JL=80Kgm2 --- M5 dengan JL=120Kgm2
Gambar 4.14 Pengaruh kedip tegangan tunggal pada kecepatan motor induksi yang dibebani torsi variabel, linear, dan konstan
Pengaruh kedip tegangan ganda pada kecepatan motor yang dibebani torsi variabel, linear, dan konstan ditunjukkan oleh kurva pada Gambar 4.15. Pada kurva terlihat bahwa ketika kedip tegangan ganda akibat gangguan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5 menyebabkan motor mengalami penurunan kecepatan secara berulang. Motor M3, M4, dan M5 mengalami stalling, dimana motor M5 mengalami stalling pada detik ke-13,1 lebih cepat dibandingkan motor M3 dan M4.
Gambar 4.15 Pengaruh kedip tegangan ganda pada kecepatan motor induksi yang dibebani torsi variabel, linear, dan konstan
Pengaruh kedip tegangan tunggal pada torsi motor yang dibebani torsi variabel, linear, dan konstan ditunjukkan oleh kurva pada Gambar 4.16. Pada
KECEPATAN (rad/s)
WAKTU (Detik)
--- M3 dengan Torsi Beban Variabel --- M4 dengan Torsi Beban Linear --- M5 dengan Torsi Beban Konstan
KECEPATAN (rad/s)
WAKTU (Detik)
--- M3 dengan Torsi Beban Variabel --- M4 dengan Torsi Beban Linear --- M5 dengan Torsi Beban Konstan
kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan torsi. Pada kondisi pemulihan kecepatan atau motor berakselerasi maka terjadi juga pemulihan torsi sampai kecepatan pulih. Pemulihan torsi dialami oleh motor M3 yang dibebani torsi variabel dan motor M4 yang dibebani torsi linear dengan waktu masing-masing yaitu 2,6 detik dan 5,4 detik sedangkan motor M5 yang dibebani torsi konstan mengalami stalling sehingga motor menghasilkan torsi rotor terblok.
Gambar 4.16 Pengaruh kedip tegangan tunggal pada torsi motor induksi yang dibebani torsi variabel, linear, dan konstan
Pengaruh kedip tegangan ganda pada torsi motor yang dibebani torsi variabel, linear, dan konstan ditunjukkan oleh kurva pada Gambar 4.17. Pada kurva terlihat bahwa ketika kedip tegangan ganda akibat gangguan terjadi pada detik ke 5,5 sampai 6 dan detik ke 11 sampai 11,5 menyebabkan motor mengalami penurunan torsi secara berulang. Motor M3, M4, dan M5 mengalami stalling sehingga ketiga motor menghasilkan torsi rotor terblok. Motor M5 mengalami penurunan torsi lebih cepat dibandingkan motor M3 dan M4.
TORSI (Nm)
WAKTU (Detik)
--- M3 dengan Torsi Beban Variabel --- M4 dengan Torsi Beban Linear --- M5 dengan Torsi Beban Konstan
Gambar 4.17 Pengaruh kedip tegangan ganda pada torsi motor induksi yang dibebani torsi variabel, linear, dan konstan
Pengaruh kedip tegangan tunggal pada arus motor yang dibebani torsi variabel, linear, dan konstan ditunjukkan oleh kurva pada Gambar 4.18. Pada kurva terlihat bahwa ketika kedip tegangan tunggal akibat gangguan terjadi pada detik ke 5,5 sampai 6 menyebabkan motor mengalami penurunan arus. Pada saat kondisi pemulihan kecepatan maka terjadi pemulihan arus selama motor berakselerasi dan arus kembali seperti semula ketika kecepatan pulih. Motor M3 dan M4 yang masing-masing dibebani torsi variabel dan linear mengalami pemulihan kecepatan dapat bekerja dengan besar arus sedikit lebih besar dari semula yaitu 488 A karena motor M5 yang dibebani torsi konstan mengalami stalling. Motor M5 mengalami stalling sehingga motor dialiri dengan arus rotor terblok.
TORSI (Nm)
WAKTU (Detik)
--- M3 dengan Torsi Beban Variabel --- M4 dengan Torsi Beban Linear --- M5 dengan Torsi Beban Konstan
![Gambar 2.6 Bentuk gelombang kedip tegangan tunggal [10]](https://thumb-ap.123doks.com/thumbv2/123dok/3824841.3950241/23.892.292.687.379.609/gambar-bentuk-gelombang-kedip-tegangan-tunggal.webp)