Universitas Pertamina -
PENGENDALIAN KECEPATAN MOTOR DC
MAGNET PERMANEN MENGGUNAKAN
KONTROLER PI UNTUK SKUTER LISTRIK
LAPORAN TUGAS AKHIR
Oleh:
Muhammad Amien Marzuq Hilman
102116067
FAKULTAS TEKNOLOGI INDUSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
P
E
N
G
E
ND
ALIAN
K
E
CEP
ATAN
M
OT
OR D
C
M
AGNET
P
E
RM
AN
E
N M
E
NGG
U
NA
K
AN
K
ONT
ROL
E
R P
I U
NTUK
S
KUT
E
R LIS
T
RI
K
Muha
mm
ad Amien Ma
rz
uq Hilm
an
1021160
67
PENGENDALIAN KECEPATAN MOTOR DC
MAGNET PERMANEN MENGGUNAKAN
KONTROLER PI UNTUK SKUTER LISTRIK
LAPORAN TUGAS AKHIR
Oleh:
Muhammad Amien Marzuq Hilman
102116067
FAKULTAS TEKNOLOGI INDUSTRI
PROGRAM STUDI TEKNIK ELEKTRO
UNIVERSITAS PERTAMINA
2020
Universitas Pertamina -
LEMBAR PENGESAHAN
Judul tugas akhir
: Pengendalian Kecepatan Motor DC Magnet
Permanen Menggunakan Kontroler PI untuk
Skuter Listrik
Nama Mahasiswa
: Muhammad Amien Marzuq Hilman
Nomor Induk Mahasiswa
: 102116067
Program Studi
:
Teknik Elektro
Fakultas
: Teknologi Industri
Tanggal Lulus Sidang Tugas Akhir
:
11 Agustus 2020
Jakarta, 19 Agustus 2020
MENGESAHKAN
Pembimbing I
: Nama
: Wahyu Kunto Wibowo, S.T., M.Eng.
NIP
: 116059
Pembimbing II
: Nama
: Aulia Rahma Annisa, M.T.
NIP
: 116057
MENGETAHUI,
Ketua Program Studi Teknik Elektro
Dr. Eng. Wahyu Kunto Wibowo
NIP. 116059
Universitas Pertamina - i
ABSTRAK
Muhammad Amien Marzuq Hilman, 102116067,
Pengendalian Kecepatan
Motor DC Magnet Permanen Menggunakan Kontroler PI untuk Skuter Listrik.
Salah satu permasalahan terbesar di Jakarta adalah polusi. Penyebab polusi
ini disebabkan oleh kendaraan konvensional. Salah satu kendaraan listrik yang
dapat digunakan yaitu skuter. Pada skuter komponen utama yang digunakan skuter
adalah aktuator. Aktuator yang digunakan merupakan motor DC magnet permanen
(PMDC). Pengontrolan kecepatan pada motor ini dilakukan dengan menggunakan
sistem
closed loop
. Kontroler yang digunakan pada sistem closed loop adalah
kontroler PI. Sistem
closed loop
kontroler PI ini dipilih disebabkan kesederhanaan
dan aplikasi yang banyak digunakan pada aplikasi industri dan transportasi. Pada
kontroler PI digunakan nilai penguatan proporsional (
𝐾
𝑃) untuk mengatur nilai
overshoot
dannilai penguatan integral (
𝐾
𝐼) untuk mengatur efek
steady-state error
.
Adapun metode penentuan nilai penguatan ini menggunakan metode GA, metode
ini memenuhi kriteria nilai
overshoot
dan
steady-state error
. Pada pengujian terjadi
pergeseran nilai
gain,
sehinggadilakukan
retuning
untuk menentukan nilai
penguatan yang sesuai dengan sistem. Di akhir hasil performa metode penentuan
nilai pengguatan menggunakan GA telah memenuhi kriteria yang ditentukan.
Kata Kunci:
Pengendalian Kecepatan, Motor DC, Kontroler PI, dan
Genetic
Algorithm
(GA).
ABSTRACT
Muhammad Amien Marzuq Hilman, 102116067, Permanent Magnet DC Motor
Speed Control using PI Controller for Electric Scooter.
One of the problems in Jakarta is pollution. The cause of this pollution is
conventional fuel vehicles. Reduction in air pollution can use electric vehicles. One
of the electric vehicles that fulfill the standards is scooter. In scooter, the main
component used by the scooter is the actuator. The actuator can be used is
permanent magnet DC (PMDC) motor. In this actuator, process control is carried
out with a closed-loop system. Closed-loop system was chosen because of
simplicity and widely used in industrial and transportation. The PI controller used
a proportional gain value (
𝐾
𝑃) to adjust the overshoot value and an integral gain
(
𝐾
𝐼) to adjust the steady-state error effect. The method for determining the value of
this gain used the GA method, this method fulfills the criteria of the overshoot and
steady-state error. In the test, there has been a shift in the value of the gain. Then
the retuning is carried out to determine the value of the gain by the system. The gain
value that has been obtained will be reset to decide the best gain value in the system.
In the end, the performance results using GA according to the specified criteria.
Keywords:
Speed Control, DC Motor, PI Controller, and Genetic Algorithm
(GA).
Universitas Pertamina - iii
KATA PENGANTAR
Assalamualaikum Warahmatullahi Wabarokatuhu
Puji syukur dipanjatkan kehadirat Allah SWT. atas rahmat dan karunia-Nya sehingga laporan Tugas Akhir yang berjudul “Pengendalian Kecepatan Motor DC Magnet Permanen Menggunakan Kontroler PI untuk Skuter Listrik” dapat terselesaikan. Tugas Akhir ini merupakan salah satu mata kuliah yang wajib ditempuh pada program studi S1 Teknik Elektro, Fakultas Teknologi Industri, Universitas Pertamina.
Dalam pengerjaan dan penyelesaian Tugas Akhir ini, tidak terlepas dari bantuan banyak pihak yang telah memberikan arahan dan masukkan kepada penulis. Atas dasar demikian, ucapan terima kasih diberikan kepada :
1. Kedua orang tua, Bapak Ir. H. Muhammad Hilman dan Ibu Dra. Hj. Andi Patappari dan keluarga tercinta, yang senantiasa selalu mendoakan dan memberikan semangat dan motivasi dalam mengerjakan dan menyelesaikan Tugas Akhir. 2. Bapak Dr. Eng. Wahyu Kunto Wibowo selaku Ketua Program Studi Teknik
Elektro, Universitas Pertamina; dosen pembimbing I; dosen wali yang telah banyak meluangkan waktu, memberikan bimbingan, arahan serta motivasi.
3. Ibu Aulia Rahma Annisa, M.T. selaku dosen pembimbing II dan selaku Sekertaris Program Studi Program Studi Teknik Elektro Universitas Pertamina. yang telah membimbing serta memotivasi selama penulisan Tugas Akhir ini.
4. Seluruh jajaran dosen dan staf Program Studi Teknik Elektro Universitas Pertamina
5. Najmita Riadiana, yang selalu memberikan semangat dan support dalam menyelesaikan Tugas Akhir ini.
6. Yudho Dwiandanu Berkah dan Syailendra Andi sebagai sahabat terbaik di Teknik Elektro UP.
7. Fathan Satria Mujahid, sebagai sumber informasi dan teman ter-humble di Teknik Elektro UP.
8. Seluruh teman Teknik Elektro Universitas Pertamina yang telah memberikan pengalaman dan ilmu yang tidak ternilai harganya.
9. Seluruh pihak yang telah membantu dalam penyelesaian Tugas Akhir ini dan tidak dapat disebutkan namanya satu per satu.
Apabila dalam Tugas Akhir ini masih terdapat kekurangan, melalui kata pengantar ini penulis mengharapkan kritik dan saran yang membangun dari pembaca. Semoga Tugas Akhir ini dapat memberikan manfaat dan kontribusi bagi seluruh pihak.
Terima kasih.
Jakarta, 23 Juni 2020 Penulis,
DAFTAR ISI
ABSTRAK ... i
ABSTRACT ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... iv BAB I. PENDAHULUAN ... 1 Latar Belakang ... 1 Rumusan Masalah ... 3 Batasan Masalah ... 3 Tujuan Perancangan ... 4 Manfaat Perancangan ... 4
BAB II. TINJAUAN PUSTAKA ... 6
Studi Literatur ... 6
Motor PMDC sebagai Aktuator Skuter ... 6
Prinsip Kerja Motor PMDC ... 6
Model Matematik Motor PMDC ... 7
Driver Motor PMDC ... 8
Metal Oxide Semiconductor Field Transistor (MOSFET) ... 9
Buck Converter ... 9
PWM ... 10
Sistem Kontrol ... 11
Kontroler PI ... 12
Genetic Algortihm (GA) ... 13
Sensor Hall sebagai Sensor Kecepatan ... 14
Respon Sistem Kontrol ... 14
BAB III. KONSEP PERANCANGAN ... 17
Diagram Alir Perancangan... 17
Blok Diagram Skuter ... 17
Blok Diagram Kontroler Skuter Listrik ... 18
Pertimbangan Perancangan ... 19
Analisis Teknis ... 20
Plant (Skuter Listrik) ... 20
Buck Converter sebagai Driver Motor PMDC ... 21
A. Prosedur Pengujian ... 21
B. Hasil Pengujian Buck Converter ... 22
Hall Sensor sebagai Sensor Kecepatan ... 25
A. Prosedur Pengujian ... 25
B. Pemrograman Sensor Kecepatan ... 26
C. Hasil Pengujian Sensor Kecepatan ... 26
Power Supply ... 28
Kontroler ... 28
Pengujian Motor DC ... 29
A. Prosedur Pengujian ... 29
B. Pre-Prosessing Data ... 29
C. Pengujian Motor DC Open Loop ... 31
Universitas Pertamina - v
Penentuan Nilai Penguatan PI pada DC Closed Loop ... 45
Penentuan Nilai Penguatan PI menggunakan Metode Auto-Tuning ... 46
Penentuan Nilai Penguatan PI menggunakan Metode Ziegler Nichols 1 ... 48
Penentuan Nilai Penguatan PI menggunakan Metode Genetic Algorithm ... 50
Keseluruhan Simulasi Closed Loop ... 52
Peralatan dan Bahan ... 54
BAB IV.HASIL DAN PEMBAHASAN ... 56
Motor DC Closed Loop ... 56
Simulasi Motor DC Closed Loop ... 56
Pengujian Motor DC Closed Loop ... 58
Pengujian Motor DC Closed Loop dengan Retuning Gain ... 59
Pengujian Aktuator pada Skuter ... 62
BAB V. PENUTUP ... 66
Kesimpulan ... 66
Saran ... 66
DAFTAR PUSTAKA ... 67
LAMPIRAN ... 68
Lampiran 1. Program Sensor Kecepatan (Sensor Hall) ... 68
Lampiran 2. Program Kontroler PI ... 69
Lampiran 3. Rangkaian Skuter Listrik ... 70
Lampiran 4. Hasil Pengujian ... 71
Lampiran 5. Pengujian Auto-Tuning ... 73
Lampiran 6. Pengujian Ziegler Nichols ... 74
Lampiran 7.Form Bimbingan Dosen Pembimbing 1 ... 75
DAFTAR GAMBAR
Gambar 1.1 Skuter Listrik ... 1
Gambar 2.1 Rangkaian Motor DC ... 7
Gambar 2.2 Rangkaian Ekivalen Motor DC ... 7
Gambar 2.3 Model Matematik Motor PMDC ... 8
Gambar 2.4 Rangkaian Buck Converter ... 9
Gambar 2.5 Comparator pada Signal PWM ... 10
Gambar 2.6 Signal PWM ... 11
Gambar 2.7 Sistem Kontrol Rangkaian Tertutup ... 12
Gambar 2.8 Blok Diagram GA ... 13
Gambar 2.9 Grafik Step Response Transient ... 14
Gambar 3.1 Blok Diagram Sistem Pengendalian Kecepatan Motor PMDC pada Skuter . 17 Gambar 3.2 Blok Diagram Kontroler Closed Loop Skuter Listrik ... 18
Gambar 3.3 Diagram Alir Perancangan Skuter Listrik ... 19
Gambar 3.4 Gear Ratio ... 20
Gambar 3.5 Rangkaian Buck Converter ... 21
Gambar 3.6 Diagram Alir Perancangan Buck Converter ... 22
Gambar 3.7 Diagram Buck Converter pada PSIM ... 22
Gambar 3.8 Respon Tegangan Buck Converter menggunakan PSIM (Duty Cycle 50%) . 23 Gambar 3.9 Pengujian Response Sistem Buck Converter ... 25
Gambar 3.10 Diagram Alir Sensor Hall dalam Pembacaan Kecepatan Skuter... 25
Gambar 3.11 Diagram Alir Program Sensor Kecepatan ... 26
Gambar 3.12 Pengukuran Kecepatan menggunakan Tachometer ... 27
Gambar 3.13 Diagram Alir Pengujian Motor DC ... 29
Gambar 3.14 Motor DC Open Loop (Input = 22V) sebelum Pre-Processing Data ... 30
Gambar 3.15 Motor DC Open Loop (Input = 22V) setelah Pre-Processing Data ... 30
Gambar 3.16 Response Kecepatan Motor DC Open Loop ... 31
Gambar 3.17 ProcessModel Toolbox ... 32
Gambar 3.18 Response Kecepatan Motor DC... 33
Gambar 3.19 Simulasi Kecepatan Motor DC pada TF1 ... 34
Gambar 3.20 Response Kecepatan Motor DC... 35
Gambar 3.21 Simulasi Kecepatan Motor DC pada TF2 ... 36
Gambar 3.22 Response Kecepatan Motor DC... 37
Gambar 3.23 Simulasi Kecepatan Motor DC pada TF3 ... 38
Gambar 3.24 Response Kecepatan Motor DC... 39
Gambar 3.25 Simulasi Kecepatan Motor DC pada TF4 ... 39
Gambar 3.26 Response Kecepatan Motor DC... 40
Gambar 3.27 Simulasi Kecepatan Motor DC pada TF5 ... 41
Gambar 3.28 Response Kecepatan Motor DC... 42
Gambar 3.29 Simulasi Kecepatan Motor DC pada TF6 ... 43
Gambar 3.30 Cross Correlation Test ... 44
Gambar 3.31 Response Simulasi TF4 dan Pengujian Motor DC ... 45
Gambar 3.32 Block Diagram Motor DC Closed Loop Tanpa Beban ... 46
Gambar 3.33 Diagram Proses Auto-Tuning ... 46
Universitas Pertamina - vii
Gambar 3.35 Respon Motor DC menggunakan metode Auto-Tuning ... 47
Gambar 3.36 Diagram Proses Ziegler-Nichols 1 ... 48
Gambar 3.37 Respon Motor DC Open Loop ... 49
Gambar 3.38 Respon Motor DC menggunakan metode Ziegler-Nichols 1 ... 49
Gambar 3.39 Blok Diagram ITAE ... 50
Gambar 3.40 Diagram Proses Genetic Algorithm ... 51
Gambar 3.41 Respon Motor DC menggunakan metode Genetic Algorithm... 52
Gambar 3.42 Respon Sistem Motor DC ... 53
Gambar 4.1 Respon Simulasi Sistem Motor DC ClosedLoop (1000 RPM) ... 56
Gambar 4.2 Respon Simulasi Sistem Motor DC ClosedLoop (1500 RPM) ... 57
Gambar 4.3 Respon Simulasi Sistem Motor DC ClosedLoop (2000 RPM) ... 57
Gambar 4.4 Respon Pengujian Sistem Motor DC ClosedLoop (1000 RPM) ... 58
Gambar 4.5 Respon Pengujian Sistem Motor DC ClosedLoop (1500 RPM) ... 58
Gambar 4.6 Respon Pengujian Sistem Motor DC ClosedLoop (2000 RPM) ... 59
Gambar 4.7 Respon Pengujian Sistem Motor DC ClosedLoopRetuning (1000 RPM) ... 60
Gambar 4.8 Respon Pengujian sistem Motor DC ClosedLoopRetuning (1500 RPM) ... 60
Gambar 4.9 Respon Pengujian Sistem Motor DC Closed LoopRetuning (2000 RPM) ... 61
Gambar 4.10 Respon Kecepatan Motor DC Berbeban (Rating Maksimal) ... 63
DAFTAR TABEL
Tabel 2.1 Karakteristik MOSFET [20] ... 9
Tabel 3.1 Spesifikasi Perancangan Aktuator Motor DC ... 17
Tabel 3.2 Alat Bahan Buck Converter ... 21
Tabel 3.3 Data Pengujian Buck Converter ... 24
Tabel 3.4 Data Pengujian Sensor Kecepatan... 27
Tabel 3.5 Konfigurasi Pin Arduino Nano ... 28
Tabel 3.6 Data Pengujian Motor DC OpenLoop ... 31
Tabel 3.7 Kriteria Pemilihan TransferFunction ... 33
Tabel 3.8 Karakteristik Respon Transient Motor DC OpenLoop ... 33
Tabel 3.9 Karakteristik Respon TransientTransferFunction 1... 34
Tabel 3.10 Karakteristik Respon Transient Motor DC OpenLoop ... 35
Tabel 3.11 Karakteristik Respon TransientTransfer Function 2... 36
Tabel 3.12 Karakteristik Respon Transient Motor DC Open Loop ... 37
Tabel 3.13 Karakteristik Respon Transient Function 3 ... 38
Tabel 3.14 Karakteristik Respon Transient Motor DC Open Loop ... 39
Tabel 3.15 Karakteristik Respon Transient Transfer Function 4... 40
Tabel 3.16 Karakteristik Respon Transient Motor DC Open Loop ... 41
Tabel 3.17 Karakteristik Respon Transient Transfer Function 5... 41
Tabel 3.18 Karakteristik Respon Transient Motor DC Open Loop ... 42
Tabel 3.19 Karakteristik Respon Transient Transfer Function 6... 43
Tabel 3.20 Karakteristik Respon Transient Transfer Function... 43
Tabel 3.21 Desain Spesifikasi Motor DC Closed Loop Tanpa Beban ... 45
Tabel 3.22 Nilai Penguatan Kontroler PI (Auto-Tuning) ... 47
Tabel 3.23 ResponseTransient Simulasi Motor DC metode Auto-Tuning ... 48
Tabel 3.24 ResponseTransient Simulasi Motor DC metode Ziegler-Nichols 1 ... 50
Tabel 3.25 Parameter Genetic Algorithm ... 50
Tabel 3.26 Respon Transient Simulasi Motor DC metode Genetic Algorithm ... 52
Tabel 3.27 Resume Karakteristik Respon Transient pada Motor DC Closed Loop ... 53
Tabel 3.28 Alat dan Bahan ... 54
Tabel 4.1 Nilai Penguatan Kontroler PI (Genetic Algorithm) ... 56
Tabel 4.2 Response Pengujian Transient Motor DC metode Genetic Algorithm ... 57
Tabel 4.3 Response Pengujian Transient Motor DC metode Genetic Algorithm ... 59
Tabel 4.4 Nilai Penguatan Kontroler PI (Retuning GA) ... 60
Tabel 4.5 Response Pengujian Transient Motor DC metode Genetic Algorithm ... 61
Tabel 4.6 Massa Beban Statis Ban Belakang Skuter... 62
BAB I.
PENDAHULUAN
Pada bab ini dibahas mengenai latar belakang pembuatan tugas akhir, rumusan masalah, batasan masalah, tujuan, dan manfaat perancangan.
Latar Belakang
Alat transportasi merupakan kendaraan yang digunakan untuk memindahkan benda maupun makhluk hidup dari satu tempat ke tempat lain [1]. Alat transportasi merupakan kebutuhan sekunder masyarakat, khususnya di daerah perkotaan. Spesifikasi kendaraan yang dibutuhkan di daerah perkotaan yaitu kendaraan yang fleksibel dan ramah lingkungan. Spesifikasi ini didasarkan oleh gaya hidup masyarakat perkotaan yang membutuhkan fleksibilitas. Salah satu masalah di perkotaan adalah polusi udara yang sudah berbahaya. Berdasarkan fleksibilitas dan ramah lingkungan dapat diselesaikan dengan kendaraan skuter listrik. Hal ini disebabkan skuter listrik dapat dipindahkan secara fleksibel dan tidak mengeluarkan emisi karbon [2].
Skuter listrik pada gambar 1.1 merupakan kendaraan roda dua yang permukaannya terdapat landasan untuk diinjak oleh pengendara dan roda yang menyetuh permukaan landasan secara langsung [3]. Pada skuter listrik terdapat berbagai perangkat yang digunakan. Beberapa perangkat yang digunakan pada skuter listrik yaitu aktuator, sumber energi listrik, rangka kendaraan, hingga alat komunikasi. Aktuator adalah perangkat yang digunakan untuk menggerakkan roda dari skuter. Tipe aktuator yang digunakan adalah motor listrik.
Gambar 1.1 Skuter Listrik
Motor listrik terbagi menjadi dua jenis yaitu motor arus searah (motor DC) dan motor arus bolak-balik (motor AC). Adapun dalam aplikasi transportasi berdaya rendah yang sering digunakan adalah motor DC. Hal ini disebabkan nilai referensi motor DC berbentuk signal linier, sedangkan motor AC berbentuk signal sinusoidal [4]. Dampak dari signal linier adalah sistem mudah dikontrol forward, reverse, maupun stop. Disisi lain, sumber yang linier menyebabkan kecepatan dan torsi mudah menyesuaikan dengan referensi, sehingga pengendalian kecepatan pada motor DC dilakukan dengan mengatur nilai arus medan pada stator.
Motor DC memiliki beberapa tipe, salah satunya motor DC magnet permanen (motor PMDC). Motor PMDC banyak digunakan pada aplikasi industri, mainan, hingga
2 – Universitas Pertamina
transportasi [5][6]. Hal ini disebabkan magnet permanen memiliki nilai medan stator yang relatif konstan, dampaknya nilai pengaturan medan stator pada motor PMDC sangat efisien. Selain itu, penggunaan magnet permanen ini membuat ukuran kerangka motor DC menjadi lebih kecil dibandingkan motor DC dengan field winding. Hal ini disebabkan magnet permanen menggantikan fungsi field winding. Oleh sebab itu, ukuran stator pada kerangka motor menjadi lebih sederhana dan ramping dibandingkan motor DC jenis lainnya.
Motor PMDC memiliki performa motor yang dapat dikontrol dengan mudah. Pengontrolan motor PMDC dapat dilakukan dengan metode closed loop. Pengontrolan dengan metode ini memiliki kelebihan yaitu sistem ini tahan terhadap gangguan internal maupun eksternal. Selain itu, sistem ini dapat menyesuaikan dengan nilai referensi yang telah ditetapkan dan respon transient dapat diatur sesuai dengan kebutuhan sistem. Pengontrolan dengan metode closed loop dapat menggunakan kontroler PID dan lainnya. Setiap jenis kontroler memiliki kelebihan. Adapun kelebihan kontroler PID ini yaitu kontroler PID memiliki kesederhanaan struktur kontrol, akan tetapi kontroler ini telah terbukti dalam banyak penelitian serta menunjukkan hasil yang memenuhi kriteria [7]. Selain itu, kontroler PID mudah diaplikasikan untuk sistem yang sederhana dengan nilai toleransi error yang cukup [8].
Kontroler PID adalah kontroler yang digunakan dengan menentukan nilai penguatan proportional, integral, dan derivative [9]. Penentuan nilai penguatan ini disesuaikan dengan kebutuhan pengontrolan. Adapun fungsi dari penguatan proporsional (𝐾𝑃) yaitu
mengatur nilai overshoot. Namun, penguatan integral (𝐾𝐼) digunakan untuk mengatur nilai
steady-state error dan mengatur nilai respon transient. Penguatan derivative (𝐾𝐷) akan
mengatur efek stabilitas sistem dan mengatur transient response [8]. Adapun penentuan nilai penguatan dapat dilakukan dengan metode beberapa metode diantaranya trial and error, menggunakan metode optimalisasi genetic algoritm (GA), dan lainnya.
Pada proses penentuan kriteria pada pengendalian sistem closed loop ini. Penentuan kriteria sistem didasarkan oleh keamanan dan kenyamanan pengendara skuter listrik. Pada sistem kali ini terdapat 2 kriteria yang diatur yaitu overshoot dan steady-state error. Dalam bentuk fisis kedua kriteria ini menyatakan besar nilai error pada grafik respon motor DC. Nilai error ini didasarkan dari nilai referensi. Pada overshoot, nilai error ini berada pada saat starting motor DC terhadap nilai referensi. Pada steady-state error, nilai error ditunjukkan dari besar selisih kelebihan atau kekurangan dari nilai referensi. Adapun besar nilai overshoot 10% didasari oleh maksimal nilai kecepatan skuter yaitu 15 km/jam, sehingga kelebihan kecepatan pada skuter maksimal 2 km/jam. Namun, pemilihan steady-state error dibawah 5% berdampak kepada perubahan kecepatan saat steady state senilai 1 km/jam.
Metode yang digunakan dalam penentuan nilai penguatan P, I, dan D akan menentukan nilai performa kontrol pada motor PMDC. Berdasarkan penelitian sebelumnya, ketika metode optimalisasi GA dibandingkan dengan metode trial and error dan fuzzy hasilnya sistem menunjukkan nilai performa yang paling optimal ditunjukkan oleh metode optimalisasi GA [10] [11]. Adapun GA adalah algoritma yang mengikuti
proses evolusi alami. Konsep utama GA adalah individu-individu yang paling unggul akan bertahan hidup sedangkan individu yang lemah akan punah [12]. Disisi lain, berdasarkan penelitian sebelumnya pada penerapan motor DC perbandingan penetapan metode kontrol antara PI-Fuzzy dan PI didapatkan hasil nilai kontrol sistem yang terbaik adalah GA-PI [13]. Pada penelitian motor induksi dan eksitasi terpisah penggunaan GA-GA-PI menunjukan respon transien yang paling cepat dibandingkan metode PI-Fuzzy [11] [10].
Berdasarkan pemaparan tersebut, perancangan sistem pengendalian kecepatan PMDC pada skuter listrik. Pada perancangan ini menggunakan metode pengontrolan closed loop. Adapun metode kontrol yang digunakan adalah kontroler PI dengan metode penentuan nilai penguatan GA. Pada tahap awal dilakukan penentuan rangkaian PMDC closed loop menggunakan metode kontroler PI dengan penentuan nilai penguatan auto-tuning, Ziegler Nichols, dan Genetic Algorithm. Setelah itu, dibandingkan dengan metode kontroler PI dengan penentuan nilai penguatan menggunakan ziegler nichols, dan GA.
Rumusan Masalah
Berdasarkan latar belakang yang telah dipaparkan, diketahui masalah yang terdapat pada skuter listrik yang ada saat ini adalah kehandalan pada aktuator skuter, sehingga seringkali terjadi pergeseran nilai steady-state dan overshoot hingga ketidakstabilan dalam performa aktuator skuter dengan sistem open loop. Hal ini menjadi permasalahan apalagi ketika aktuator skuter diberi beban statis maupun dinamis. Perubahan nilai performa kecepatan berbeda dengan nilai referensi. Kondisi ini menjadi bagian dari permasalahan yang diselesaikan.
Salah satunya solusi penyelesaian masalah ini dilakukan dengan menggunakan closed loop sistem pada aktuator yang akan digunakan pada skuter. Cara ini dilakukan untuk mengatur kecepatan putar aktuator skuter. Pada aplikasi aktuator closed loop dilakukan dengan menentukan kriteria berdasarkan standar kontrol [14]. Kriteria yang ditentukan yaitu Steady State Error kurang dari 5% dan Overshoot kurang dari 10%. Pada Tugas Akhir ini digunakan kontroler PI untuk mengatur kecepatan motor listrik. Kemudian nilai penguatan pada kontroler proporsional dan integral akan diperoleh dengan menggunakan metode penentuan menggunakan GA.
Batasan Masalah
Berdasarkan pemaparan latar belakang terdapat bayasan masalah dalam pengendalian kecepatan aktuator skuter listrik ini yaitu:
1. Motor yang digunakan adalah motor PMDC.
2. Metode kontroler yang digunakan adalah kontroler PI.
3. Metode penentuan nilai penguatan PI menggunakan metode GA. 4. Variabel kontrol yang diatur adalah kecepatan dari motor PMDC.
4 – Universitas Pertamina
Tujuan Perancangan
Tujuan akhir dalam pengerjaan tugas akhir ini yaitu:
1. Merancang dan mendesain skuter dengan menggunakan penggerak bertenaga listrik (aktuator PMDC) dengan sistem closed loop.
2. Menganalisis respon dari hasil pengujian sistem closed loop menggunakan metode Genetic Algorithm, beserta solusi penyelesaian permasalahan yang terjadi.
3. Menentukan nilai penguatan proporsional dan integral pada aktuator skuter listrik yang handal dan sesuai dengan standar kontrol. Memenuhi standar kontrol yang baik yaitu nilai steady state error kurang dari 5% dan overshoot kurang dari 10 % [14].
Manfaat Perancangan
Pengerjaan tugas akhir ini ditujukan agar:
1. Dapat menggunakan penggerak skuter bertenaga listrik.
2. Menerapkan teori closed loop pada aktuator skuter dengan melakukan pengujian secara langsung.
3. Penelitian dapat menjadi acuan dalam penggunaan aktuator (Motor DC) dalam berbagai fungsi, seperti alat transportasi, alat perabot rumah tangga, hingga alat industri.
6 – Universitas Pertamina
BAB II.
TINJAUAN PUSTAKA
Pada bab ini dibahas tentang teori dasar dalam penyusunan Tugas Akhir. Tugas Akhir ini membahas tentang pengendalian motor PMDC pada skuter listrik menggunakan kontroler PI dengan penentuan nilai penguatan menggunakan GA, sehingga materi yang akan dibahas yaitu motor PMDC sebagai aktuator skuter, driver motor PMDC, sistem kontrol, kontroler PI, genetic algortihm (GA), sensor hall sebagai sensor kecepatan dan respon sistem kontrol.
Studi Literatur
Pada penelitian sebelumnya telah dilakukan penilitan sejenis, Tetapi penelitian tersebut menggunakan objek penelitian sepeda [15] [16]. Kedua penelitian ini masing-masing meneliti tentang penerapan sistem penggerak secara elektrik pada sistem. Akan tetapi, pada penelitian ini hanya menjelaskan tentang pemasangan motor terhadap plant sepeda, sehingga sistem belum terpasang dengan sistem kestabilan sistem. Adapun pada penelitian lainnya dilakukan penelitian tentang kontroler pada sistem segway [17]. Namun, sistem ini menggunakan plant yang berbeda dan penetuan nilai penguatan PID menggunakan metode trial and error.
Inovasi desain perancangan ini yaitu melakukan pemasangan sistem penggerak elektrik pada plant skuter dengan mengikuti standar kestabilan sistem. Selain itu, akan dilakukan pengontrolan menggunakan kontroler PI dengan penentuan nilai penguatan menggunakan GA.
Motor PMDC sebagai Aktuator Skuter
Motor listrik merupakan perangkat elektromagnetis yang mengubah energi listrik menjadi energi mekanik [18]. Berdasarkan sumber, motor listrik terbagi menjadi AC dan DC. Motor DC merupakan jenis motor yang memerlukan tegangan yang searah. Kontruksi pada motor DC ini terdiri dari stator, rotor, sikat arang, dan komutator. Stator merupakan kumparan medan pada motor DC, sedangkan rotor merupakan kumparan jangkar. Stator adalah bagian yang bagian yang tidak berputar pada motor. Khusus pada motor PMDC stator merupakan magnet permanent. Rotor merupakan bagian yang berputar pada motor. Adapun sikat arang merupakan komponen yang menghubungkan antara rotor dan sumber DC. Khusus pada motor DC terdapat komutator (cincin belah).
Prinsip Kerja Motor PMDC
Prinsip kerja motor PMDC yaitu sumber arus listrik DC mengalir pada rotor melalui komutator dan sikat arang. Pada rotor tersebut timbul medan magnet. Gaya medan magnet menghasilkan torsi yang berasal dari cross product dengan medan pada stator, sehingga torsi ini akan memutar motor dengan arah tertentu. Fenomena munculnya torsi pada motor ini dikenal dengan gaya lorentz. Adapun pada motor DC terdapat komponen perantara yang disebut komutator. Komutator berfungsi untuk membalik arah arus listrik setiap setengah putaran dan menjaga arah putaran pada arah yang sama. Komponen penyusun ini sesuai gambar 2.1.
Poros Komutator Jangkar / Rotor Medan / Stator
Sikat Arang
Gambar 2.1 Rangkaian Motor DC [5]
Model Matematik Motor PMDC
Pada perancangan sistem ini diketahui plant modeling motor DCmemiliki gambar rangkaian ekivalen berikut :
VI LA
RA
VB IA TM TL Gambar 2.2 Rangkaian Ekivalen Motor DCBerdasarkan gambar 2.2. diketahui untuk mendapatkan penurunan rumus menggunakan hukum Kirchoff Voltage Law (KVL) maka persamaan electrical dari motor DC yaitu :
𝑉𝐴(𝑡) = 𝑅𝐴𝐼𝐴(𝑡) + 𝐿𝐴
𝑑𝐼𝐴(𝑡)
𝑑𝑡 + 𝑉𝐵(𝑡) (2.1)
𝑉𝐴 merupakan tegangan input dan 𝑉𝐵 merupakan tegangan backemf. 𝑅𝐴, 𝐿𝐴, dan 𝐼𝐴
merupakan resistansi, induktansi, dan arus jangkar, maka penjabaran 𝑉𝐵 diketahui :
𝑉𝐵 = 𝑘𝐵 𝜔(𝑡) (2.2)
𝜔(𝑡) merupakan kecepatan angular dan 𝑘𝐵 merupakan konstanta backemf. Maka
didapatkan nilai persamaan dengan mensubtitusi nilai persamaan 2.2 ke persamaan 2.1, sehingga persamaan electrical motor DC menjadi :
𝑉𝐴(𝑡) = 𝑅𝐴𝐼𝐴(𝑡) + 𝐿𝐴
𝑑𝐼𝐴(𝑡)
𝑑𝑡 + 𝑘𝐵𝜔(𝑡) (2.3)
8 – Universitas Pertamina
𝑇𝑀(𝑡) − 𝑇𝐿 = 𝐵𝑀𝜔(𝑡) + 𝐽𝑀
𝑑𝜔(𝑡)
𝑑𝑡 (2.4)
sedangkan 𝑇𝐿 dan 𝑇𝑀 merupakan torsi beban dan induksi, dan diketahui bahwa 𝐵𝑀
merupakan nilai koefisien friksi motor dan 𝐽𝑀 adalah nilai momen inersia dari rotor,
sehingga pada DC motor akan menghasilkan torsi induksi yang nilainya sesuai persamaan berikut:
𝑇𝑀= 𝑘𝑟 𝐼𝐴(𝑡) (2.5)
sehingga ketika persamaan 2.5 disubtitusikan ke persamaan 2.4 didapatkan persamaan :
𝑘𝑟 𝐼𝐴(𝑡) − 𝑇𝐿 = 𝐵𝑀𝜔(𝑡) + 𝐽𝑀
𝑑𝜔(𝑡)
𝑑𝑡 (2.6)
Pemodelan motor PMDC dilakukan dengan menggunakan menentukan input dan output. Pada motor PMDC ini yang menjadi input adalah tegangan, sedangkan yang menjadi output merupakan kecepatan sudut. Bedasarkan hal ini didapatkan blok diagram pada gambar 2.3.
Gambar 2.3 Model Matematik Motor PMDC
Maka didapatkan persamaan aktuator skuter dalam bentuk laplace sebagai berikut:
𝜔 (𝑠) 𝑉(𝑠) = 𝐾𝐵 𝑠2(𝐿 𝐴𝐽𝑀) + 𝑠(𝐿𝐴𝐵𝑀+ 𝑅𝐴𝐽𝑀) + (𝑅𝐴𝐵𝑀+ 𝐾𝐵𝐾𝑅) (2.7)
Driver Motor PMDC
Driver merupakan bagian yang digunakan untuk mengendalikan input motor PMDC. Pada skuter listrik driver yang digunakan yaitu DC Chopper Step Down “Buck Converter”. Buck converter digunakan untuk mengendalikan input tegangan dengan rentang nilai 0-25,4 V. Penentuan rentang nilai tegangan dilakukan dengan menentukan nilai pembagi tegangan melalui signal pulse-width modulation (PWM). Adapun MOSFET merupakan komponen pada buck converter yang digunakan untuk melakukan proses pembentukan signal PWM. Berdasarkan hal tersebut, akan dijabarkan tentang MOSFET, buck converter dan PWM. 𝐾 𝐿𝑠 + 𝑅 1 𝐽𝑠 + 𝐵 + − 𝑉(𝑠) 𝐽𝑎𝑛𝑔𝑘𝑎𝑟 𝐵𝑒𝑏𝑎𝑛 𝑉𝑏(𝑠) 𝑉𝑎(𝑠) 𝜔(𝑠) 𝐾𝑏
Metal Oxide Semiconductor Field Transistor (MOSFET)
MOSFET merupakan salah satu jenis semikonduktor yang digunakan untuk beralih dan memperkuat sinyal elektronik di perangkat elektronik. Terdapat 2 jenis MOSFET yaitu tipe PNP dan tipe NPN. MOSFET terbuat dari susunan lapisan oksida pada semikonduktor. MOSFET memiliki beberapa masalah umum yang biasanya terjadi peningkatan konsumsi daya akibat kebocoran arus di kaki gerbang (G), dapat diatasi dengan mengganti isolator gerbang yaitu silicon dioksida dengan dielektrik tinggi.
Pada rangkaian driver buck converter, penggunaan driver MOSFET digunakan untuk membentuk signal PWM. Pada prinsipnya MOSFET digunakan sebagai saklar. Penggunaan MOSFET sebagai saklar sesuai kondisi cut-off dan saturasi. Ketika dalam kondisi cut-off tegangan dari drain ke source akan terhalangi, sedangan kondisi saturasi adalah kondisi ketika tegangan dari drain ke source diteruskan:
Tabel 2.1 Karakteristik MOSFET [20]
Buck Converter
Buck converter merupakan perangkat konversi yang digunakan untuk menurunkan tegangan dan menaikkan arus. Buck converter hanya dapat melakukan penurunan tegangan pada arus searah. Pada perangkat ini terdapat beberapa komponen diantaranya MOSFET, dioda, induktor, dan kapasitor, hal ini sesuai dengan gambar 2.4 berikut:
C R
Vi D Vo
L
S
Gambar 2.4 Rangkaian Buck Converter
Fungsi perangkat pada buck converter yaitu MOSFET digunakan untuk melakukan switching pada tegangan input (𝑉𝑖), sehingga terjadi penurunan nilai tegangan dan
Indikator Kondisi Cut-Off Saturasi Perbandingan VGS dan VTH VGS < VTH VGS > VTH VGS Terhubung GND (0 V) dan VGS < VTH VGS > VTH VDS VDS = VDD = VOUT VDS = 0 V
Circuit Open Circuit Short Circuit
Kondisi Drain Arus Tidak Mengalir RDS< 0,1Ω VD= IDRDS
10 – Universitas Pertamina
peningkatan nilai arus. Adapun besar nilai tegangan yang diteruskan disesuaikan dengan besar nilai PWM yang diteruskan.
Perangkat selanjutnya yaitu kapasitor dan induktor yang berfungsi sebagai filter tegangan dan arus, hal ini disebabkan pada proses switching terdapat tegangan dan arus ripple yang akan berdampak kepada sistem. Namun, dioda pada buck converter berfungsi untuk mengantisipasi beban induktif (Back-EMF). Dari persamaan 2.8 dan 2.9 dilakukan untuk menghitung nilai induktor dan kapasitor. Adapun untuk menghitung nilai induktor dapat dilakukan dengan menggunakan persamaan berikut :
𝐿 =1 𝑓× (𝑉𝑖𝑛− 𝑉𝑜𝑢𝑡) × 𝑉𝑜𝑢𝑡 𝑉𝑑 × 1 ΔL (2.8)
sedangkan untuk menghitung nilai kapasitor dilakukan dengan menggunakan persamaan berikut : 𝐶 = 𝑉𝑜𝑢𝑡(1 − 𝐷) 8 × 𝐿 × Δ𝑉𝑜𝑢𝑡× 𝑓2× × 1 ΔL (2.9)
PWM
PWM atau Pulse Width Modulation adalah signal kotak yang terdiri dari signal HIGH dan LOW. PWM ini berfungsi untuk memanipulasi lebar sinyal atau tegangan yang dinyatakan dengan pulsa dalam suatu periode. PWM digunakan untuk mentransfer data pada telekomunikasi ataupun mengatur tegangan sumber yang konstan untuk mendapatkan tegangan rata-rata yang berbeda. Pada aplikasi pengendalian motor, PWM digunakan untuk mengendalikan signal input pada MOSFET, sehingga MOSFET dapat meneruskan tegangan ketika signal PWM HIGH. Namun, akan membatasi tegangan ketika signal PWM LOW. Adapun secara prinsip PWM ini diciptakan dari comparator dengan cara membandingkan hasil antara signal pembangkitan dan signal referensi [19]. Secara detail sesuai gambar 2.5 berikut:
Gambar 2.5 Comparator pada Signal PWM
PWM pada arduino diciptakan pada gambar 2.5 menghasilkan signal HIGH dan LOW. Nilai digital ini digunakan untuk membuat pola hidup-mati. Pola ini dapat mensimulasikan tegangan antara HIGH (5V) dan LOW (0V) dengan mengubah durasi waktu antar kedua nilai ini sesuai dengan nilai yang telah ditentukan.
Jika dilakukan pengulangan pola HIGH dan LOW ini cukup cepat dengan LED, maka hasilnya adalah seperti sinyal tegangan stabil antara 0V dan 5V mengendalikan kecerahan LED. Secara detail pengaturan lama HIGH dan LOW pada arduino ditentukan dari nilai skala yang telah ditentukan yaitu 0-255. 0 merupakan nilai LOW sedangkan 255 merupakan nilai HIGH.
Gambar 2.6 Signal PWM [21]
Besar nilai perbandingan HIGH dan LOW akan menentukan besarnya tegangan diteruskan. Pada gambar 2.6 dapat dilihat perbandingan waktu akan menyebabkan perbedaan nilai HIGH dan LOW.
Sistem Kontrol
Pembuatan rancangan alat memiliki sistem kontrol tertentu. Sistem kontrol adalah suatu sistem yang digunakan untuk mengendalikan, memerintahkan, dan mengatur keadaan suatu sistem. Pada sistem aktuator skuter listrik open loop merupakan sistem yang tidak terkontrol. Secara spesifik, pengaturan kecepatan pada sistem aktuator skuter listrik open loop dilakukan secara manual. Permasalahan sistem open loop ini yaitu nilai kecepatan pada yang dihasilkan tidak dapat menyesuaikan dengan nilai referensi kecepatan yang telah ditetapkan. Selain itu, permasalahan sistem open loop yaitu gangguan internal maupun eksternal dapat mengubah hasil akhir dari kecepatan sistem ini.
Namun, pada sistem aktuator skuter listrik closed loop perubahan nilai beban akan disesuaikan dengan nilai referensi. Sistem closed loop ini juga tahan terhadap gangguan internal maupun eksternal, sehingga sistem ini merupakan sistem yang terkontrol. Pada aktuator skuter listrik ini tipe motor DC yang digunakan adalah motor PMDC. Pada sistem motor PMDC sistem kontrol yang digunakan adalah sistem closed loop. Sistem ini sesuai dengan gambar 2.7 berikut:
12 – Universitas Pertamina
Plant
Output
Input
+
-Feedback
Gambar 2.7 Sistem Kontrol Rangkaian Tertutup
Pada bagian kontroler rangkaian tertutup terdapat perbedaan dibandingkan kontroler terbuka. Pada kontroler terbuka sistem tidak input signal hanya berasal dari signal referensi saja. Akan tetapi, pada sistem kontroler rangkaian tertutup yang menjadi input adalah selisih signal referensi dan nilai output feedback (umpan balik).
Kontroler PI
Kontroler PI merupakan salah satu kontroler yang digunakan pada sistem kontrol loop tertutup. Sistem dengan kontroler PI identik dengan sistem kontrol umpan balik. Kontroler merupakan salah satu komponen sistem yang melakukan pengaturan sinyal umpan balik dengan sinyal referensi, sehingga kontroler ini akan melakukan pengontrolan pada selisih nilai referensi dan umpan balik [20]. Pada penggunaan pengontrolan motor ini akan digunakan kontroler PI. Kontroler PI adalah penjumlahan antara kontroler Proporsional dengan kontroler Integral. Setiap jenis kontroler memiliki dengan kelebihan dan kekurangan masing-masing.
Karakteristik kontroler Proportional yaitu mengurangi efek rise time tetapi tidak pernah menghilangkan steady-state error, menaikkan overshoot, tetapi kontroler ini tidak pernah menghilangkan steady state error. Namun, kontroler Integral akan mengurangi efek steady-state error, membuat respon sistem menjadi lebih lambat, tetapi akan meningkatkan nilai respon transient. Penentuan nilai P dan I didasarkan kepada penentuan nilai penguatan P (𝐾𝑝) dan I (𝐾𝑖). Penentuan ini dapat dituliskan sebagai berikut:
𝑢(𝑡) = 𝐾𝑝𝑒(𝑡) + 𝐾𝑖 (2.10)
dengan demikian didapatkan fungsi alih kontrol PI dalam laplace sebagai berikut:
𝑢(𝑠) = [𝐾𝑝+
𝐾𝑖
𝑠] 𝑒(𝑠) (2.11)
dengan 𝑢(𝑡) merupakan signal input, 𝐾𝑝 dan 𝐾𝑖 adalah konstanta penguatan proporsional
dan integral.
Berdasarkan penjabaran karakteristik kontroler dan persamaan rumus kontroler PI diharuskan melakukan penentuan nilai penguatan PI. Pengaruh 𝐾𝑝, 𝑇𝑖, dan 𝑇𝐷 pada respon
dapat disimpulkan sebagai berikut:
1. 𝐾𝑝yang kecil akan membuat pengendali menjadi sensitif dan cenderung
membawa plant berosilasi serta menghasikan respon sistem yang lambat. Sedangkan nilai penguatan 𝐾𝑝 yang besar akan menyebakan respon tidak stabil
dan meninggalkan offset yang besar juga.
2. 𝐾𝑖 yang kecil akan bermanfaat untuk menghilangkan offset, tetapi juga
Sedangkan 𝐾𝑖 yang besar belum tentu efektif menghilangkan offset dan
cenderung membuat respon menjadi lambat.
3. Maka kasus pengontrolan motor diharuskan melakukan penentuan nilai penguatan 𝐾𝑝 yang kecil agar nilai overshoot sesuai dengan batas maksimum
yaitu 5%, sehingga penentuan nilai 𝐾𝑝 > 𝐾𝑖 untuk menghilangkan steady state
error.
Genetic Algortihm (GA)
Genetic Algorithm (GA) adalah fungsi untuk menentukan nilai yang sesuai dengan kriteria pada suatu sistem. GA merupakan metode yang mengadaptasi proses evolusi alami mahluk hidup. Penentuan nilai yang paling sesuai kriteria didasarkan oleh genetik terbaik yang akan dilakukan evolusi selanjutnya. GA ini metode yang telah terbukti dapat menemukan performa sistem terbaik, sehingga dapat menemukan titik global optimum. Pada GA ini dikenal istilah reproduksi, crossover dan mutasi. Reproduksi adalah fase untuk menghasilkan nilai-nilai kromosom. Kromosom ini akan digunakan untuk proses seleksi agar mendapatkan nilai terbaik, sedangkan crossover merupakan bagian persilangan dalam menentukan turunan terbaik. Diakhir mutasi adalah fase perubahan acak dari nilai posisi string. Ini dianggap sebagai keadaan tidak tampak dalam GA.
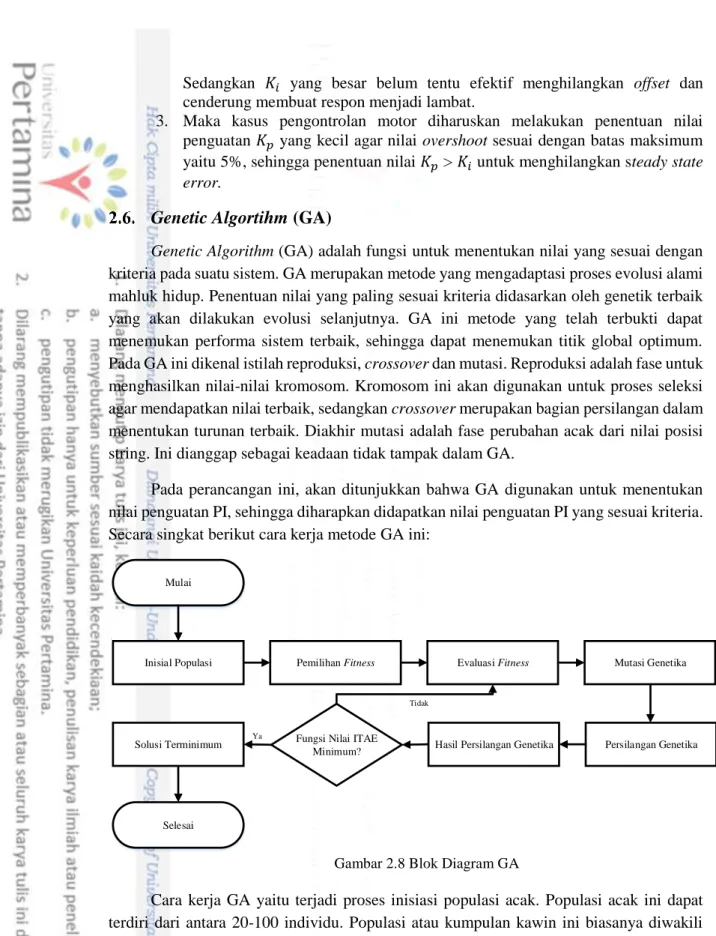
Pada perancangan ini, akan ditunjukkan bahwa GA digunakan untuk menentukan nilai penguatan PI, sehingga diharapkan didapatkan nilai penguatan PI yang sesuai kriteria. Secara singkat berikut cara kerja metode GA ini:
Mulai
Selesai
Inisial Populasi Pemilihan Fitness Evaluasi Fitness Mutasi Genetika
Persilangan Genetika Hasil Persilangan Genetika
Fungsi Nilai ITAE Minimum?
Ya
Solusi Terminimum
Tidak
Gambar 2.8 Blok Diagram GA
Cara kerja GA yaitu terjadi proses inisiasi populasi acak. Populasi acak ini dapat terdiri dari antara 20-100 individu. Populasi atau kumpulan kawin ini biasanya diwakili oleh bilangan real yang disebut kromosom. Seberapa baik individu melakukan tugas diukur dan dinilai oleh fungsi tujuan. Setelah diketahui inisial populasi selanjutnya dilakukan pemilihan fungsi fitness. Fungsi fitness ini akan memproses masing-masing individu sesuai dengan keadaan genetiknya. Genetik pada setiap kromosom yang dinilai uanggul akan dibiarkan bertahan hidup, sedangkan yang dianggap tidak baik akan dimusnahkan. Setelah dilakukan mutasi genetika selanjutnya dilakukan persilangan antar genetik unggul. Pada
14 – Universitas Pertamina
kondisi genetik yang sudah sesuai standar kriteria, maka sistem akan berakhir dan mengeluarkan kombinasi nilai pada suatu fungsi.
Sensor Hall sebagai Sensor Kecepatan
Komponen ini salah satu cara untuk menentukan waktu tempuh pada sebuah perangkat rotary encoder. Prinsip kerja sensor hall yaitu dengan mendeteksi adannya medan magnet yang mengenai sensor. Kelebihan sensor ini yaitu sensor ini tidak akan terkoreksi akibat adanya cahaya dan debu, sehingga permasalahan cahaya dan debu dapat diabaikan. Namun, Secara komposisi penyusun sensor hall ini terdiri dari semi konduktor tipis. Ketika semikonduktor ini didekatkan dengan medan magnet, maka garis fluks magnetik akan menggunakan gaya pada semikonduktor tersebut untuk mengalihkan muatan pembawa (elektron dan holes) ke kedua sisi pelat semikonduktor. Elektron dan holes bergerak masing-masing ke kedua sisi semikonduktor, sehingga akan timbul perbedaan potensial diantara kedua sisi tersebut.
Sensor hall ini akan digunakan untuk penentuan nilai timingHIGH dan LOW dalam satu periode. Penentuan nilai timing atau periode (𝑇) ini akan dikonversi menjadi kecepatan rotasi (𝜔) berdasarkan persamaan berikut ini:
𝜔 =2𝜋
𝑇 (2.12)
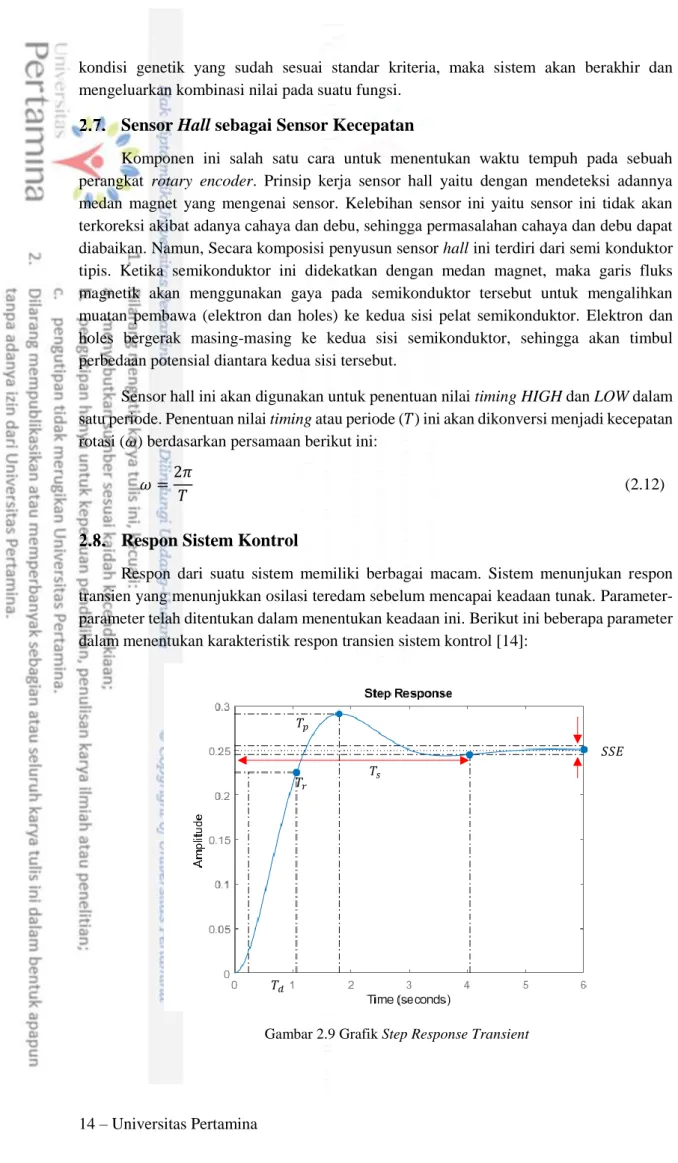
Respon Sistem Kontrol
Respon dari suatu sistem memiliki berbagai macam. Sistem menunjukan respon transien yang menunjukkan osilasi teredam sebelum mencapai keadaan tunak. Parameter-parameter telah ditentukan dalam menentukan keadaan ini. Berikut ini beberapa Parameter-parameter dalam menentukan karakteristik respon transien sistem kontrol [14]:
Gambar 2.9 Grafik Step ResponseTransient
𝑇𝑑 𝑇𝑝
𝑇𝑟
𝑇𝑠
1. Waktu Tunda (𝑇𝑑) atau delay time merupakan waktu yang diperlukan respon
untuk mencapai setengah nilai puncak signal yang pertama kali.
2. Waktu Naik (𝑇𝑟) atau rise time merupakan waktu yang diperlukan dari 10-90%
dari nilai akhirnya. Hal ini ditentukan oleh standar yang digunakan. Pada sistem orde kedua redaman.
3. Waktu Puncak (𝑇𝑃) atau peak time adalah waktu yang diperlukan respon untuk
mencapai puncak signal yang pertama kali.
4. Waktu Penetapan (𝑇𝑠) atau settling time adalah waktu yang diperlukan untuk
mencapai dan menetap dalam daerah sekitar nilai akhir yang ukurannya ditentukan dengan persentase mutlak dari harga akhir (biasanya 2% atau 5%). 5. Steady State Error adalah selisih antara nilai referensi dan nilai error saat steady
state.
BAB III.
KONSEP PERANCANGAN
Konsep perancangan pada bab ini dilakukan untuk membahas proses yang dilakukan dalam perancangan sistem skuter listrik. Bagian yang dilakukan mulai dari perancangan blok diagram skuter, blok diagram kontroler, analisis teknis, proses identifikasi sistem, hingga penentuan perangkat pendukung seperti sensor, power supply, DC Chopper, dan mikrokontroler.
Pada bagian ini juga dilakukan pengujian pada perangkat pendukung yaitu buck converter dan sensor kecepatan. Pengujian ini dilakukan untuk mendukung sistem yang diuji. Adapun proses sensor hall sebagai pengujian dilakukan dengan dengan metode unit testing, maka diketahui step response pada sistem secara terpisah.
Diagram Alir Perancangan
Diagram alir perancangan pada sistem ini merupakan penjelasan detail terhadap aktuator pada skuter dan kontroler yang digunakan. Secara detail spesifikasi perancangan yang dilakukan yaitu:
Tabel 3.1 Spesifikasi Perancangan Aktuator Motor DC
No. Indikator Keterangan
1. Tipe Aktuator PMDC MY1016 250W 24V 2. Kecepatan Rotasi 0-2700 RPM
3. Tegangan Input 0-24V
4. Driver Aktuator Buck Converter
5. Akurasi Sensor ≤ 10%
6. Steady State Error ≤ 5%
7. Overshoot ≤ 10%
Dari tabel 3.1diketahui nilai spesifikasi perancangan pada aktuator ini menjadi acuan dalam perancangan yang dilakukan.
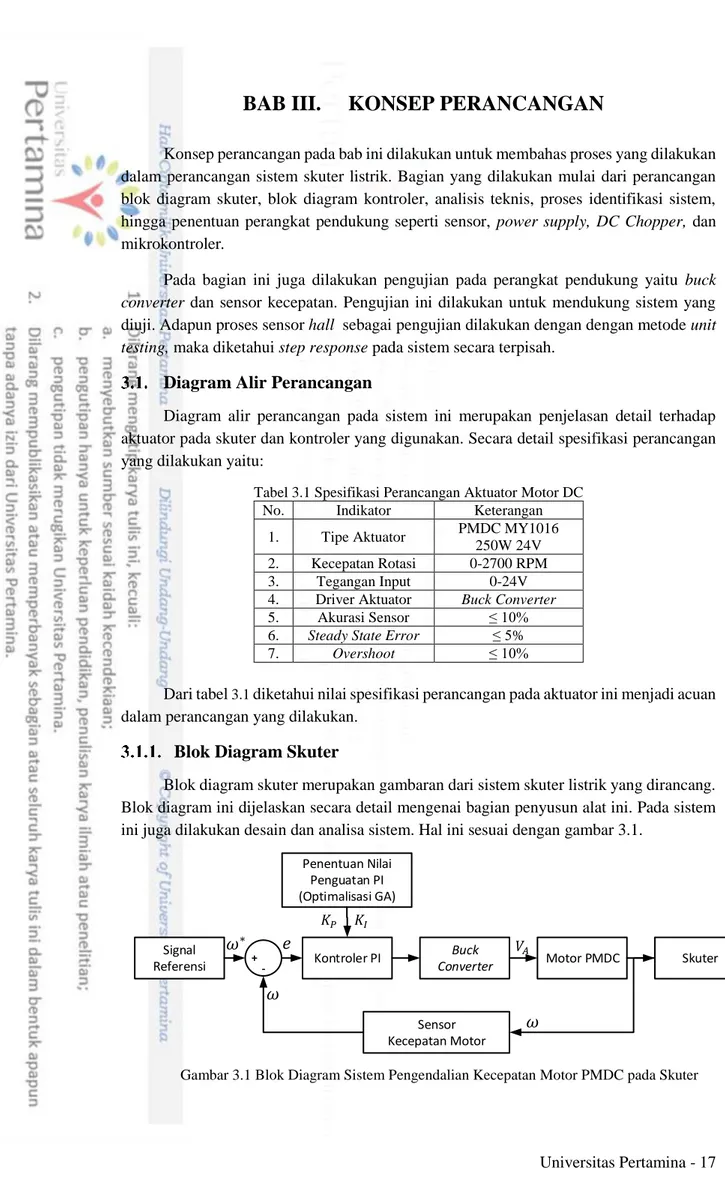
Blok Diagram Skuter
Blok diagram skuter merupakan gambaran dari sistem skuter listrik yang dirancang. Blok diagram ini dijelaskan secara detail mengenai bagian penyusun alat ini. Pada sistem ini juga dilakukan desain dan analisa sistem. Hal ini sesuai dengan gambar 3.1.
Signal Referensi Penentuan Nilai Penguatan PI (Optimalisasi GA) Kontroler PI Buck Converter Motor PMDC Sensor Kecepatan Motor Skuter +
-Gambar 3.1 Blok Diagram Sistem Pengendalian Kecepatan Motor PMDC pada Skuter
𝜔
𝜔
𝜔
∗𝑒
𝐾𝑃 𝐾𝐼
18 – Universitas Pertamina
Perancangan sistem dalam pembuatan alat ini sesuai pada gambar 3.1. Berdasarkan gambar tersebut dapat dilihat bahwa sistem tersebut terdiri dari beberapa blok diagram skuter yaitu:
1. Skuter merupakan objek pada pemasangan perangkat motor PMDC. 2. Motor PMDC berfungsi sebagai objek penggerak pada skuter listrik.
3. Buck converter merupakan driver motor DC. Perangkat ini berfungsi sebagai pengendali motor DC perangkat ini menerima input dari baterai/ power supply sebesar 24 V dan mengeluarkan output dengan nilai 0-24 V.
4. Arduino Nano digunakan untuk membangkitkan signal PWM sebagai input pada buck converter.
5. Sensor kecepatan menggunakan hall sensor. Sensor hall berfungsi mengukur kecepatan skuter listrik.
6. Kontroler PI adalah komponen sistem yang digunakan untuk mengolah signal input hasil selisih nilai signal input referensi dan signal umpan balik.
7. Metode Genetic Algorithm (GA) berfungsi sebagai penentu nilai penguatan pada kontroler PI.
Blok Diagram Kontroler Skuter Listrik
Blok diagram kontroler closed loop skuter listrik digunakan untuk menentukan nilai kontrol pada PWM yang dikeluarkan oleh Arduino Nano. Adapun pada skuter ini menggunakan blok diagram sesuai dengan gambar 3.2 sebagai berikut:
Kontroler PI Penentuan Nilai Penguatan PI (Optimalisasi GA) + - +- +
-Gambar 3.2 Blok Diagram Kontroler Closed Loop Skuter Listrik
Berdasarkan blok diagram pada gambar 3.2 diketahui kontroler PI berfungsi sebagai penentu nilai input tegangan pada plant. Kontroler PI menentukan besar nilai tegangan berdasarkan selisih nilai error pada antara kecepatan referensi dan kecepatan aktual. Adapun fungsi GA akan menentukan nilai penguatan P dan I pada kontroler PI. GA ini menentukan nilai penguatan P dan I dengan melakukan mutasi genetika dan memilih kombinasi penguatan P dan I yang terbaik, sedangkan index performa I.T.A.E digunakan sebagai fitness function pada fungsi GA.
Adapun yang menjadi pertimbangan dalam kontroler ini yaitu plant skuter. Skuter dalam blok diagram pada gambar 3.2 dituliskan sebagai beban torsi (𝑇𝐿). Beban torsi ini
merupakan beban-beban yang terdapat pada plant, sehingga beban torsi ini terdiri dari beban rangka skuter, beban manusia, dan beban lainnya yang terdapat pada plant.
Model Matematika Motor DC 𝑢(𝑡) 𝑇𝐿 𝐾 𝐿𝑠 + 𝑅 1 𝐽𝑠 + 𝐵 𝑦(𝑡) 𝐾𝐵
Pertimbangan Perancangan
Bagian ini dijelaskan langkah yang dipertimbangkan dan batasan dalam proses perancangan skuter listrik. Pertimbangan perancangan ini sesuai dengan diagram alir pada gambar berikut :
Mulai
Perancangan dan Desain Sistem Skuter Listrik
Perancangan Hardware
Perancangan Software
Uji Fungsi Skuter Listrik
Berhasil?
Uji Performa
Pengambilan Data, Analisis Hasil, dan Membuat
Kesimpulan
Selesai Identifikasi dan Analisis
Sistem Skuter Listrik Studi Literatur
Tid
ak
Ya
Gambar 3.3 Diagram Alir Perancangan Skuter Listrik
Berdasarakan diagram alir diawal perancangan dilakukan perancangan dan desain pada sistem skuter listrik. Hal ini dimaksudkan untuk menyiapkan plant dan perangkat mekanik yaitu skuter dan perangkat sistem pengerak elektrik. Perangkat sistem penggerak terdiri dari motor DC, buck converter, kontroler, dan baterai. Setelah diketahui desain dari sistem skuter listrik, selanjutnya dilakukan sistem identifikasi pada motor dan sistem kelistrikan. Hal ini untuk melakukan pemodelan motor DC sebagai acuan dalam penentuan nilai penguatan pada kontroler PI. Pada tahap identifikasi dan analisis juga dilakukan simulasi pada sistem untuk mengetahui dampak yang terjadi pada sistem yang dirancang. Adapun proses ini dilakukan dengan melakukan studi literatur.
Setelah perancangan, selanjutnya dilakukan pembuatan dan pemasangan sistem penggerak pada plant skuter. Sistem penggerak pada skuter yaitu motor DC. Akan tetapi, motor listrik ini membutuhkan sumber energi dan kontroler, sehingga dilakukan
20 – Universitas Pertamina
pemasangan perangkat kelistrikan dan kontroler yaitu buck converter, kontroler, dan baterai. Pada tahap berikutnya melakukan perancangan dan mengungah program ke perangkat kontroler motor DC yang telah disiapkan. Pemasangan sistem penggerak dan kelistrikan, tahap selanjutnya dapat dilakukan uji coba fungsi pada plant skuter listrik.
Tahapan terakhir yaitu uji coba fungsi, hal ini dilakukan untuk mengetahui fungsi dari sistem yang telah dipasang. Ketika sistem telah berfungsi dengan desain yang telah ditentukan, maka selanjutnya dapat dilakukan uji peforma dengan melakukan pengambilan data. Pengambilan data ini dilakukan untuk melakukan analisis performa dari sistem skuter listrik. Analisis yang dilakukan disesuaikan dengan standar kontrol, sehingga diakhir dapat disimpulkan performa dari desain sistem.
Analisis Teknis
Analisis teknis ini dilakukan perancangan produk skuter listrik menggunakan motor DC. Secara teknis, komponen yang digunakan yaitu plant, buck converter sebagai driver motor PMDC, hall sensor sebagai sensor kecepatan, power supply, arduino nano sebagai mikrokontroler, parameter motor DC, dan genetic algorithm dan ziegler nichols 1sebagai penentuan nilai penguatan PI.
Plant (Skuter Listrik)
Plant pada desain sistem ini yaitu skuter. Skuter dipasangkan sistem penggerak elektrik, sehingga sistem dapat berjalan secara elektrik. Pemasangan sistem penggerak ini dilakukan pada roda belakang. Pemasangan roda dengan motor DC dilakukan dengan menggunakan gear dan rantai. Adapun secara dilakukan dengan persamaan 3.1 rasio gear.
𝑛1
𝑛2
= 𝑑1
𝑑2 (3.1)
τ = F × r (3.2)
Perbandingan pada persamaan 3.1 dan 3.2 dapat diilustrasikan sesuai gambar 3.4, dengan 𝑛 sebagai kecepatan rotasi (RPM) dan 𝑑 sebagai diameter (m) dan menghitung nilai torsi beban pada motor.
Gear Motor DC Gear Roda
Buck Converter sebagai Driver Motor PMDC
Pengunaan buck converter ditujukan untuk menurunkan tegangan yang diterima oleh sumber tegangan (baterai). Adapun buck converter didesain dengan input 24 V dan output 0-24 V. Nilai output ini akan digunakan untuk menggerakkan motor PMDC sesuai dengan nilai referensi. Pengaturan nilai referensi ini dilakukan pada mikrokontroler (arduino nano). Adapun buck converter ini didesain sesuai gambar 3.5.
C DC Motor Vi D L PWM
Vo
Gambar 3.5 Rangkaian Buck Converter
Sistem ini menurunkan nilai tegangan dengan melakukan switching dengan menggunakan MOSFET. Switching ini didasarkan dari nilai PWM yang dilakukan, sehingga semakin besar nilai time high pada PWM maka semakin besar tegangan yang diteruskan ke motor PMDC.
A.
Prosedur Pengujian
Prosedur pengujian pada Buck Converter dilakukan dengan menggunakan menggunakan simulasi pada PSIM dan menggunakan pengujian pada duty cycle,
𝑉𝐼𝑁 , 𝑉𝑂𝑈𝑇, 𝐼𝐼𝑁, dan 𝐼𝑂𝑈𝑇. Adapun alat bahan yang digunakan untuk pembuatan
buck converter yaitu :
Tabel 3.2 Alat Bahan Buck Converter
No. Kebutuhan Kuantitas
1 Power Supply 1 Buah
2 Osiloscope 1 Buah 3 Mikrokontroller 1 Buah 4 Jumper 1 Set 5 Multimeter 2 Buah 6 Driver MOSFET (Optocoupler PC817) 1 Buah 7 MOSFET IRF 540 N-Channel 1 Buah 8 Arduino Nano 1 Buah
9 Dioda 1 Buah
10 Induktor 9.1 mH / 20A 1 Buah 11 Kapasitor 250 uF / 25V 1 Buah
22 – Universitas Pertamina
Berdasarkan alat bahan yang digunakan prosedur pengujian sesuai dengan rangkaian pada gambar 3.5, maka didapatkan diagram alir berikut:
Studi Literature dan Perancangan Model Simulasi PSIM Pengujian Model Simulasi PSIM Pemodelan Sesuai Spesifikasi? Pembuatan Perangkat Keras Perangkat Sesuai Simulasi? Pembuatan Perangkat Keras Selesai Mulai Tidak Ya Ya Tid ak Pengambilan Data
Gambar 3.6 Diagram Alir Perancangan Buck Converter
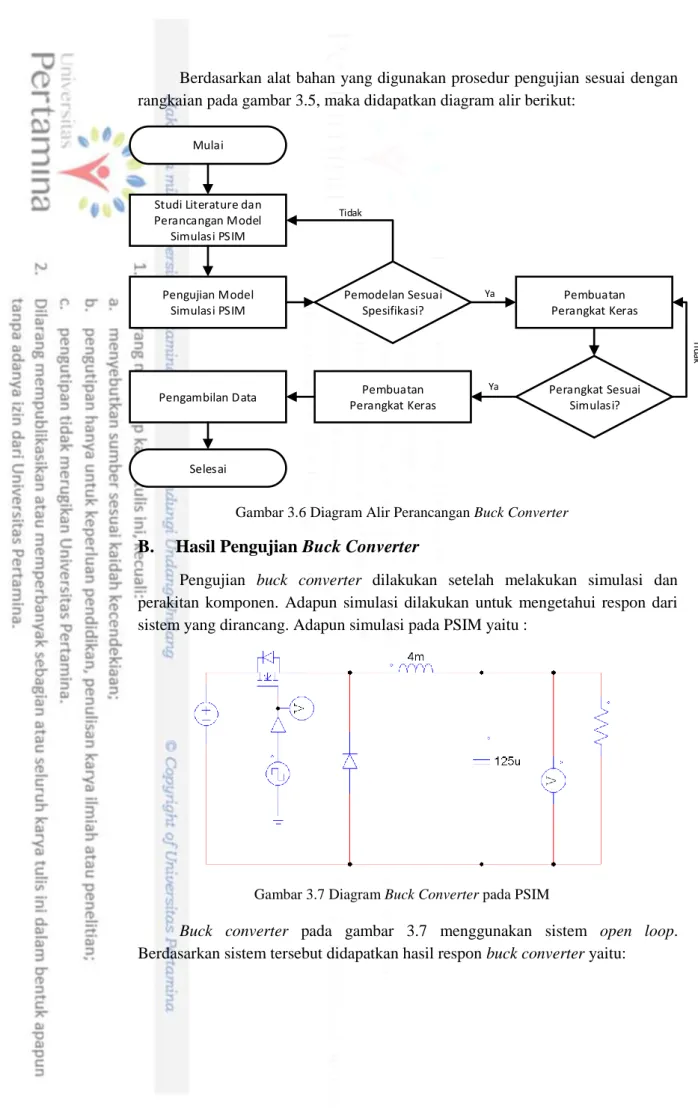
B.
Hasil Pengujian Buck Converter
Pengujian buck converter dilakukan setelah melakukan simulasi dan perakitan komponen. Adapun simulasi dilakukan untuk mengetahui respon dari sistem yang dirancang. Adapun simulasi pada PSIM yaitu :
Gambar 3.7 Diagram Buck Converter pada PSIM
Buck converter pada gambar 3.7 menggunakan sistem open loop. Berdasarkan sistem tersebut didapatkan hasil respon buck converter yaitu:
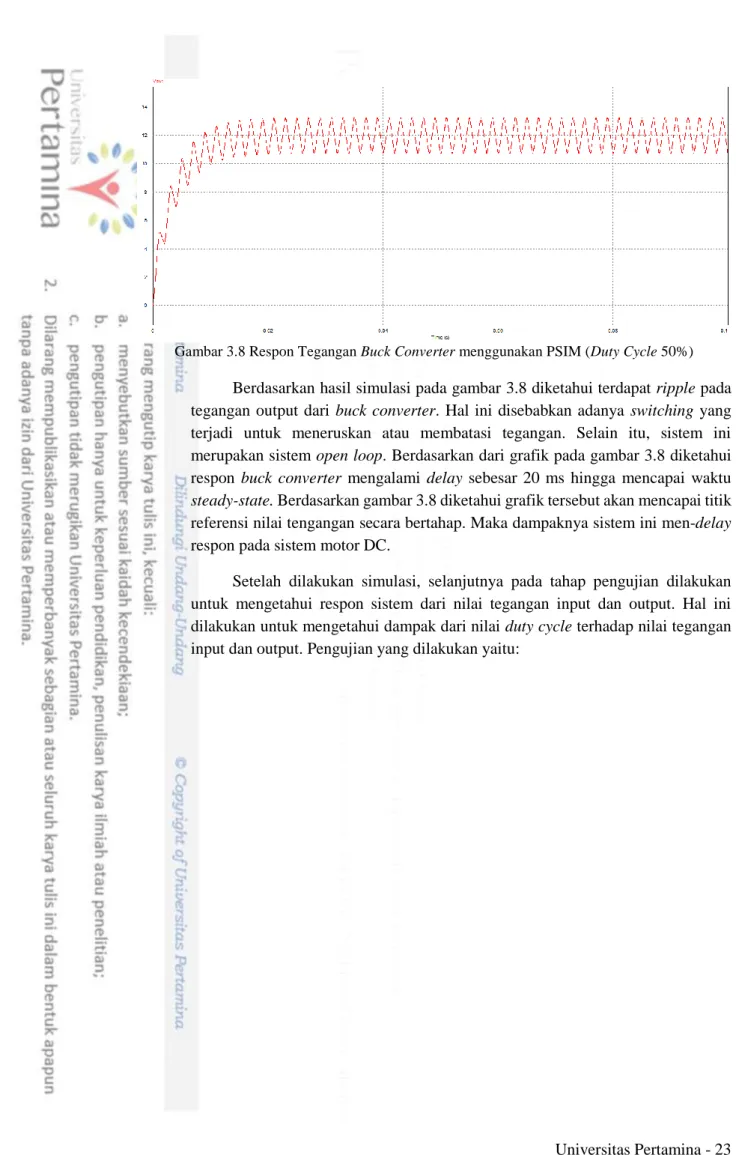
Gambar 3.8 Respon Tegangan Buck Converter menggunakan PSIM (Duty Cycle 50%) Berdasarkan hasil simulasi pada gambar 3.8 diketahui terdapat ripple pada tegangan output dari buck converter. Hal ini disebabkan adanya switching yang terjadi untuk meneruskan atau membatasi tegangan. Selain itu, sistem ini merupakan sistem open loop. Berdasarkan dari grafik pada gambar 3.8 diketahui respon buck converter mengalami delay sebesar 20 ms hingga mencapai waktu steady-state. Berdasarkan gambar 3.8 diketahui grafik tersebut akan mencapai titik referensi nilai tengangan secara bertahap. Maka dampaknya sistem ini men-delay respon pada sistem motor DC.
Setelah dilakukan simulasi, selanjutnya pada tahap pengujian dilakukan untuk mengetahui respon sistem dari nilai tegangan input dan output. Hal ini dilakukan untuk mengetahui dampak dari nilai duty cycle terhadap nilai tegangan input dan output. Pengujian yang dilakukan yaitu:
24 – Universitas Pertamina
Tabel 3.3 Data Pengujian Buck Converter
No. 𝐷𝑢𝑡𝑦 𝐶𝑦𝑐𝑙𝑒 (%) 𝑉𝐼𝑁 (V) 𝑉𝑂𝑈𝑇 (V) 1. 0 25,4 0,48 2. 5 4,56 3. 10 8,99 4. 15 12,87 5. 20 15,43 6. 25 17,04 7. 30 17,84 8. 35 18,38 9. 40 18,74 10. 45 19,25 11. 50 19,80 12. 60 20,51 13. 70 21,42 14. 80 22,57 16. 90 23,43 17. 100 24,0
Berdasarkan hasil pengujian diketahui bahwa persentase nilai duty cycle menentukan nilai tegangan output yang diteruskan oleh buck converter, sehingga untuk mendapatkan tegangan output yang diinginkan, dilakukan dengan menentukan besar persentase nilai duty cycle terhadap tegangan input pada buck converter. Adapun nilai efisiensi pada buck converter ini yaitu:
μ =𝑉𝑜𝑢𝑡 𝑉𝑖𝑛
× 100% (3.3)
μ = 24
25,4× 100% = 94,5%
Selain nilai efisiensi buck converter, dilakukan plot hasil persentase nilai 8-Bit terhadap nilai tegangan. Maka didapatkan hasil grafik pada gambar berikut:
Gambar 3.9 Pengujian Respon Sistem Buck Converter
Dari gambar 3.9 diketahui bahwa buck converter menghasilkan nilai yang non-linier, sehingga berdampak kepada pengaplikasian buck converter pada motor DC.
Hall Sensor sebagai Sensor Kecepatan
Hall sensor merupakan perangkat pengukur kecepatan rotasi dari skuter listrik. Hall sensor berfungsi sama dengan sensor kecepatan lainnya, seperti incremental rotary encoder. Sensor ini melakukan pengukuran dengan mendeteksi ada tidaknya medan magnet pada piringan rotary.
A.
Prosedur Pengujian
Adapun hasil pembacaan satu periode PWM dari sistem akan dikonversi menjadi kecepatan skuter sesuai dengan blok diagram berikut:
Mulai Pemasangan Sensor pada Skuter Listrik Menjalankan Skuter Listrik Mengambil Data Waktu (T = Th+Tl)
Kalibrasi Sensor menggunakan Tachometer
Konversi Nilai Kecepatan Sudut (ω = 2π/T) Sesuai Membuat Persamaan Linier Selesai Tid ak Ya
Gambar 3.10 Diagram Alir Sensor Hall dalam Pembacaan Kecepatan Skuter Setelah diketahui nilai pembacaan HIGH dan LOW, maka dilakukan perekaman data waktu yang dibutuhkan dalam satu periode. Selanjutnya, dilakukan konversi periode menjadi kecepatan rotasi dalam bentuk PWM sebelum dikalibrasi. Setelah kecepatan rotasi sebelum dikalibrasi didapatkan, selanjutnya dilakukan perbandingan nilai dengan nilai kecepatan rotasi motor PMDC dengan tachometer. Adapun penentuan nilai PWM didasarkan dari kelipatan nilai tegangan sumber yang diberikan. Langkah selanjutnya dilakukan plot 𝑉𝑆 terhadap 𝜔𝑠𝑒𝑛𝑠𝑜𝑟.
0 5 10 15 20 25 0% 20% 40% 60% 80% 100% T eg an g an ( V)
Persentase Nilai 8-Bit (0-255)
Respon Tegangan Output
Buck Converter
26 – Universitas Pertamina
Hal ini dilakukan untuk menentukan nilai persamaan kecepatan rotasi roda sesuai dengan persamaan berikut:
𝑦 = 𝐴𝑥 + 𝐵 (3.4)
Adapun untuk mendapatkan nilai 𝐴 didapatkan dari nilai PWM. Nilai B ditentukan dengan melakukan regresi linier, dengan nilai 𝑦 diambil dari nilai
𝜔𝑎𝑘𝑡𝑢𝑎𝑙. Adapun penentuan nilai 𝑥 didasarkan pada hasil perhitungan pada
persamaan 3.4, sehingga nilai 𝜔𝑠𝑒𝑛𝑠𝑜𝑟 yang didapatkan dari periode 1 gelombang
PWM sesuai dengan keaadaan aktual. Setelah didapatkan persamaan ini maka sensor kecepatan ini dapat digunakan dalam pengukuran kecepatan skuter listrik.
B.
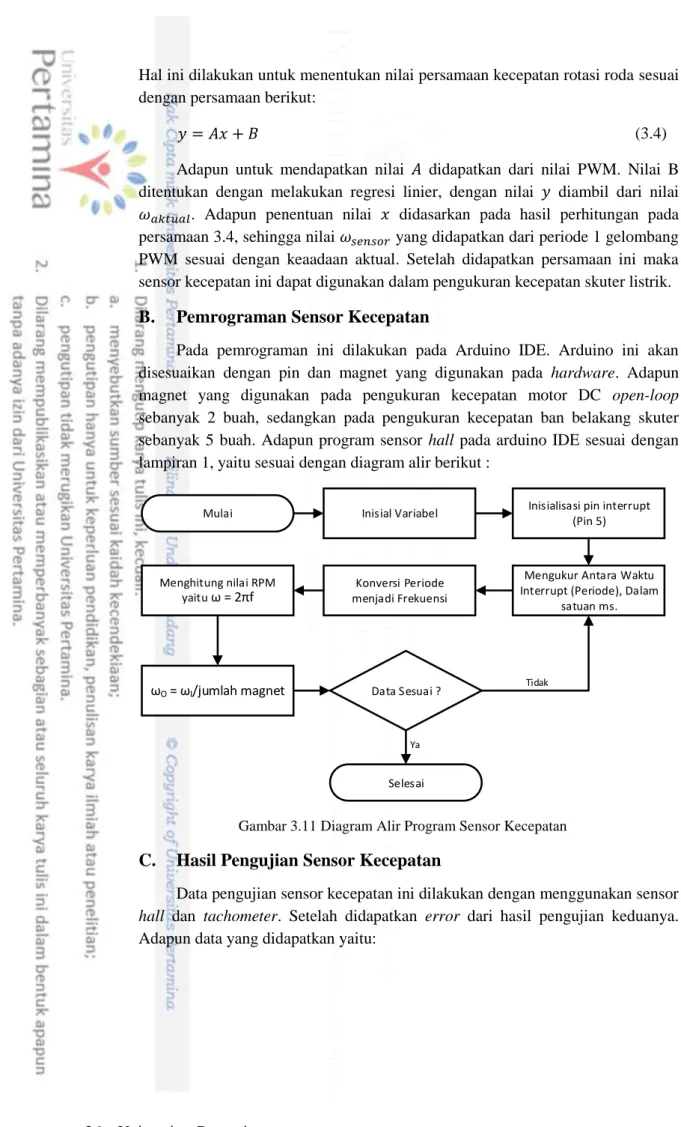
Pemrograman Sensor Kecepatan
Pada pemrograman ini dilakukan pada Arduino IDE. Arduino ini akan disesuaikan dengan pin dan magnet yang digunakan pada hardware. Adapun magnet yang digunakan pada pengukuran kecepatan motor DC open-loop sebanyak 2 buah, sedangkan pada pengukuran kecepatan ban belakang skuter sebanyak 5 buah. Adapun program sensor hall pada arduino IDE sesuai dengan lampiran 1, yaitu sesuai dengan diagram alir berikut :
Inisialisasi pin interrupt (Pin 5)
Selesai
Mulai Inisial Variabel
Data Sesuai ? Ya
Tidak
Mengukur Antara Waktu Interrupt (Periode), Dalam
satuan ms. Konversi Periode menjadi Frekuensi Menghitung nilai RPM yaitu ω = 2πf ωO = ωI/jumlah magnet
Gambar 3.11 Diagram Alir Program Sensor Kecepatan
C.
Hasil Pengujian Sensor Kecepatan
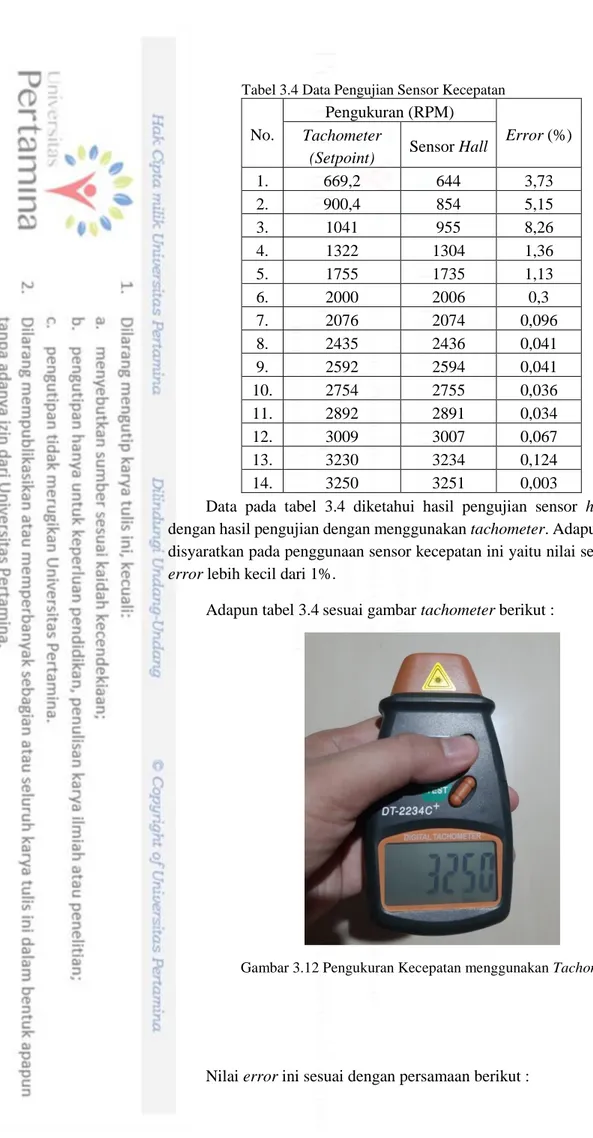
Data pengujian sensor kecepatan ini dilakukan dengan menggunakan sensor hall dan tachometer. Setelah didapatkan error dari hasil pengujian keduanya. Adapun data yang didapatkan yaitu:
Tabel 3.4 Data Pengujian Sensor Kecepatan No.
Pengukuran (RPM)
Error (%) Tachometer
(Setpoint) Sensor Hall
1. 669,2 644 3,73 2. 900,4 854 5,15 3. 1041 955 8,26 4. 1322 1304 1,36 5. 1755 1735 1,13 6. 2000 2006 0,3 7. 2076 2074 0,096 8. 2435 2436 0,041 9. 2592 2594 0,041 10. 2754 2755 0,036 11. 2892 2891 0,034 12. 3009 3007 0,067 13. 3230 3234 0,124 14. 3250 3251 0,003
Data pada tabel 3.4 diketahui hasil pengujian sensor hall dibandingkan dengan hasil pengujian dengan menggunakan tachometer. Adapun nilai error yang disyaratkan pada penggunaan sensor kecepatan ini yaitu nilai sensor dengan nilai error lebih kecil dari 1%.
Adapun tabel 3.4sesuai gambar tachometer berikut :
Gambar 3.12 Pengukuran Kecepatan menggunakan Tachometer
28 – Universitas Pertamina
𝑒𝑟𝑟𝑜𝑟 =|𝑅𝑃𝑀𝑆𝑒𝑛𝑠𝑜𝑟 𝐻𝑎𝑙𝑙− 𝑅𝑃𝑀𝑇𝑎𝑐ℎ𝑜𝑚𝑒𝑡𝑒𝑟|
𝑅𝑃𝑀𝑇𝑎𝑐ℎ𝑜𝑚𝑒𝑡𝑒𝑟
× 100% (3.5) 𝑒𝑟𝑟𝑜𝑟 =|2006−2000|2000 = 0,3%
Berdasarkan hasil pada tabel 3.4 diketahui hasil sensor hall dibandingkan pengukuran menggunakan tachometer menunjukkan error dalam rentan 0,003 - 8,26%. Hasil pengukuran pada tabel 3.4membuktikan nilai error sensor yang dapat digunakan dalam pengukuran kecepatan motor DC dengan kecepatan lebih dari 2000 rpm.
Power Supply
Power supply merupakan perangkat yang menjadi sumber energi dari motor DC. Power suppy menggunakan susunan seri-paralel dari baterai 3,7 V/ 2,2 Ah. Adapun input yang dibutuhkan dari motor DC yaitu 24 V, sehingga motor akan diseri sebanyak 7 buah baterai dengan nilai total 25,9 V. Adapun, motor ini ditargetkan dapat digunakan dalam keadaan full load selama 1 jam, sehingga hal ini sesuai dengan persamaan berikut:
𝐿𝑎𝑚𝑎 𝑃𝑒𝑛𝑔𝑔𝑢𝑛𝑎𝑎𝑛 𝐵𝑎𝑡𝑒𝑟𝑎𝑖 (𝑇𝐵𝑎𝑡𝑒𝑟𝑎𝑖) = 𝑉𝐵𝑎𝑡𝑒𝑟𝑎𝑖× 𝐼𝐵𝑎𝑡𝑒𝑟𝑎𝑖 𝑃𝑚𝑜𝑡𝑜𝑟 (3.6) 𝐼𝐵𝑎𝑡𝑒𝑟𝑎𝑖 𝑑𝑎𝑙𝑎𝑚 𝑠𝑎𝑡𝑢𝑎𝑛 ℎ = 250 𝑊 × 1 ℎ 25,9 𝑉 𝐼𝐵𝑎𝑡𝑒𝑟𝑎𝑖 𝑑𝑎𝑙𝑎𝑚 𝑠𝑎𝑡𝑢𝑎𝑛 ℎ = 9,65 𝐴ℎ
Jika setiap baterai bernilai 2,2 Ah maka dibutuhkan minimal 5 baterai paralel untuk memberi input tegangan pada motor DC yaitu 24 V. Akan tetapi, pada sistem ini menggunakan 6 baterai paralel.
Kontroler
Kontroler pada skuter listrik yaitu arduino nano. Arduino ini digunakan sebagai penentu nilai PWM yang digunakan, sehingga pin yang digunakan pada pin mikrokontroler ini yaitu:
Tabel 3.5 Konfigurasi Pin Arduino Nano No. Pin Arduino
Nano Nama Pin Fungsi
1. 6 Digital Pin
PWM
PWM output ke Driver Buck Converter
2. 8 Digital Pin
PWM PWM input Hall Sensor
3. 4 dan 29 GND GND
4. 27 VCC VCC
Penentuan pin ini dilakukan untuk menerima input data dan menyalurkan PWM kepada Driver Buck Converter. Penerimaan input difungsikan untuk mengetahui kecepatan skuter terhadap waktu, dengan mengetahui terhadap waktu didapatkan nilai konversi melalui logic yang telah dirancang.
![Tabel 2.1 Karakteristik MOSFET [20]](https://thumb-ap.123doks.com/thumbv2/123dok/3113607.2331741/24.892.48.761.77.805/tabel-karakteristik-mosfet.webp)
![Gambar 2.6 Signal PWM [21]](https://thumb-ap.123doks.com/thumbv2/123dok/3113607.2331741/26.892.46.734.89.816/gambar-signal-pwm.webp)