TUGAS JURNAL MESIN PERKAKAS
SISTEM PENGATURAN GERAKAN TOOL PADA
PROTOTIPE MESIN CNC DENGAN KONTROLER
DISTURBANCE OBSERVER
Di ajukan sebagai tugas dan syarat kelulusan kuliah mesin perkakas
Nama : M Ridwan Seftiean NIM : 2010250007
JURUSAN TEKNIK MESIN
FAKULTAS TEKNIK
UNIVERSITAS DARMA PERSADA
2014
SISTEM PENGATURAN GERAKAN TOOL PADA
PROTOTIPE MESIN CNC DENGAN KONTROLER
DISTURBANCE OBSERVER
Yoram Koren
The University of Michigan, Ann Arbor, Ml 48109
LATAR BELAKANG MASALAH
Mesin Computer Numerical Controlled (CNC) adalah suatu mesin yang dikontrol oleh komputer dengan menggunakan bahasa numerik (data perintah dengan kode angka, huruf dan simbol) sesuai dengan standart ISO. Sistem kerja teknologi CNC ini akan lebih sinkron antara computer dan mekanik, sehingga bila dibandingkan dengan mesin perkakas yang sejenis, maka mesin perkakas CNC lebih teliti,lebih tepat, lebih fleksibel dan cocok untuk produksi masal. Mesin CNC memiliki dua atau lebih arah gerakan tool yang disebut dengan sumbu atau axis. Gerakan pada axis antara lain linier (yang merupakan garis lurus) atau gerakan circular (yang merupakan lintasan melingkar). Umumnya, sumbu yang terdapat pada gerakan linier adalah X, Y dan Z sedangkan nama axis pada gerakan circular adalah A, B dan C. Salah satu spesifikasi yang dapat memperlihatkan kekompleksitasan dari mesin CNC adalah berapa banyak axis yang dimilikinya dan gerakan interpolasi yang ada. Struktur kontrol konvensional yang banyak dipakai untuk pengaturan gerakan tool pada mesin CNC adalah decoupledcontrol. Pada struktur ini setiap sumbu akan dikontrol secara independen dan tidak menerima informasi dari sumbu yang lain . Struktur ini telah dicoba dengan menggunakan metode
proportional integral control, adaptive control dan variable structure control . Kelebihan struktur decoupled-control antara lain pada kesederhanaan struktur dan kemudahan untuk direkonfigurasi. Pada struktur ini, error pada kontur dapat terjadi ketika salah satu sumbu mendapat disturbance yang akan menimbulkanerror pada trayektori sumbu tersebut, sedangkan sumbu yang lain akan berjalan dengan normal. Akibatnya kontur hasil yang merupakan resultan trayektori masing- masing akan mengalami error . Strategi yang dapat diambil untuk mengatasi masalah ini adalah dengan meningkatkan kemapuan setiap sumbu untuk mengatasi disturbances.
Salah satu metode kontrol yang mempunyai kemampuan khusus untuk meredam disturbances
adalah disturbance observer (DOB) . Metode ini sebelumnya telah digunakan untuk pengaturan meja kerja pada mesin freis dan telah teruji mampu mengatasi disturbance yang muncul dan cocok digunakan untuk pengaturan posisi pada mesin CNC. Pada pengerjaan Tugas Akhir kali ini, metode ini juga digunakan untuk pengaturan posisi pada mesin CNC, hanya saja yang diuji kali ini adalah gerakan tool dari mesin CNC.. Dengan memperhatikan hal hal diatas, maka permasalahan yang diangkat pada masalah ini adalah bagaimana mengimplementasikan DOB dengan struktur decoupled-control pada pengaturan gerakan tool prototipe mesin CNC yang diteliti.
PERUMUSAN MASALAH
Berdasarkan latar belakang masalah di atas maka pada perumusan masalah pada jurnal ini adalah
Perancangan sistem control pengaturan gerakan tools pada prototype mesin CNC dengan menggunakan kontroler disturbance observer (DOB)
Simulasi sistem control pada perancangan protype tersebut
Bagaimana mengimplementasikan DOB dengan struktur decoupled-control pada pengaturan gerakan tool prototipe mesin CNC yang diteliti
TUJUAN DAN MANFAAT
Adapun tujuan pada perancangan sistem control pengaturan pada prototype mesin CNC dengan menggunakan kontroler disturbance observer ( DOB )ini ada beberapa tujuan :
Sebagai aplikasi dan pengembangan kombinasi sistem control pada sistem CNC
Sebagai uji coba mencari metode control dalam mengurangi disturbances pada tools
Pengujian sistem control DOB pada mesin CNC
Adapun manfaat pada perancangan sistem control pengaturan pada prototype mesin CNC dengan menggunakan kontroler disturbance observer ( DOB )ini ada beberapa manfaat :
Penulis dapat mengetahui dan memahami dari suatu proses perancangan sampai manufaktur dari suatu alat yang akan di produksi.
Penulis dapat membandingkan hasil produk pada CNC yang menggunakan struktur control dan tidak menggunakan struktur control
Penulis dapat membandingkan perancangan pada sistem control mesin cnc yang telah di buat secara nyata untuk di buat analisa secara matematis
Pada perancangan sistem control ini dapat di manfaatkan sebagai sistem produksi pada perusahaan guna mendapat produk yang minim kerusakan atau reject
PEMBATASAN MASALAH
Untuk mencapai tujuan pada penulisan ini maka pembahasan masalah ini di batasi pada :
Pada jurnal tersebut hanya di batasi pada perancangan dan sistem control prototype
Analisa perhitungan hanya di batasi sampai simulasi struktur control dan pengujian pada benda kerja
METODOLOGI PENULISAN
Penulisan jurnal ini dilakukan berdasarkan fakta–fakta yang objektif agar kebenarannya dapat di pertanggung jawabkan baik secara teoritis maupun pengujiannya. Dalam melakukan perancangan dan pembuatan alat pada jurnal ini menggunakan metode pelaksanaan sebagai berikut :
Metode Studi Pustaka
Mencari referensi buku – buku penunjang yang berkaitan dengan perancangan alat tersebut, untuk melengkapi dasar teori dan data – data yang diperlukan dalam penyusunan jurnal ini.
Metode Survei Lapangan
Mencari , Mengamati, dan Memahami prinsip kerja alat – alat yang berhubungan dan diperlukan dalam perancangan alat tersebut serta mencatat spesifikasi alat – alat yang diamati untuk bahan pembanding.
Metode Perancangan dan perakitan
Melakukan pembuatan sketsa gambar, perencanaan komponen, pembuatan komponen yang dibutuhkan.
Jenis Penelitian
Dalam penelitian yang mencakup pada mesin tools dilihat dari perhitungan, efisiensi dan efektifitas kerjanya berdasarkan data yang kongkrit dengan cara :
Penelitian Kepustakaan (Library Research) yaitu dengan cara menghimpun bahan-bahan pengetahuan ilmiah yang bersumber dari buku-buku, dan tulisan-tulisan ilmiah yang erat kaitannya dengan materi penulisan.
Penelitian Lapangan (Field Research) yaitu dengan cara mengadakan pengujian dan pengetesan melalui praktek.
Sifat Penelitian
Dalam penelitian permasalahan ini penulis menggunakan deskriptif yaitu suatu penelitian yang bertujuan untuk menggambarkan keadaan atau gejala dan objek yang diteliti dengan mengambil suatu kesimpulan yang bersifat umum.
Pengumpulan Data
Data Primer
Diperoleh melalui perancangan sistem control dalam kegiatan operasionalnya dan juga melakukan pengamatan atas hasil penelitian untuk dapat diambil langkah apa yang harus dilakukan dalam penelitian tersebut.
Data Sekunder
Dengan mempelajari teori – teori yang didapat dari literatur, dokumen dan bahan pustaka lainnya yang berhubungan dengan objek penelitian.
Metode Analisa Data
Data yang diperoleh dari penelitian yang dilakukan baik secara teori maupun melalui perhitungan.
Sistematika Penulisan
jurnal ini terdiri dari lima bagian, yaitu agar alur penyusunan jurnal ini dapat disusun dengan baik dan dapat dipahami dengan mudah, adapun sistematika penulisannya sebagai berikut :
BAB I PENDAHULUAN
Bab ini berisikan latar belakang masalah, perumusan masalah, tujuan dan manfaat penelitian, pembatasan masalah, metodologi penelitian, serta sitematika penulisan.
BAB II LANDASAN TEORI
Bab ini berisikan teori serta metode dari berbagai buku yang digunakan sebagai dasar dalam menentukan model pemecahan masalah yang penulis butuhkan dalam langkah pengerjaan.
BAB III METODOLOGI PENELITIAN
Bab ini menerangkan lebih detail mengenai langkah-langkah yang diambil penulis dalam penyelesaian jurnal ini. Permodelan prototype alat serta spesifikasi alat yang akan di buat serta alat ukur yang akan di gunakan.
BAB IV HASIL PENGUJIAN DAN ANALISA PADA SISTEM KONTROL DOB PADA MESIN CNC
Bab ini berisikan tentang cara pengambilan data dan pngolahan data serta perhitungan dari hasil data yang telah di ambil pada saat percobaan serta membandingkan hasilnya.
BAB V KESIMPULAN DAN SARAN
Bab terakhir ini merupakan kesimpulan dari apa yang telah dikemukakan dalam bab – bab sebelumnya.
PERANCANGAN SIMULASI SISTEM KONTOL DOB PADA MESIN CNC
A. Prinsip Kerja Mesin CNC
Pada mesin CNC terdapat tiga buah sumbu kerja yaitu sumbu X, sumbu Y dan sumbu Z . Sumbu X dan sumbu Y berfungsi untuk membentuk kontur horizontal sedangkan sumbu Z menentukan kedalaman potongan mata pahat terhadap benda kerja. Pergerakan pada sumbu X , Y dan Z dilakukan oleh penggerak spindle. Berdasarkan prinsip kerja mesin CNC untuk membentuk benda kerja maka dapat dilihat bahwa kemampuan penggerak spindle pada tiap sumbu, menentukan hasil dari kerja mesin CNC . Jika penggerak spindle mampu bergerak sesuai dengan kontur yang diinginkan dengan baik, maka hasil kerja akan menjadi semakin baik. Tujuan dari sistem pengaturan kontur adalah supaya sistem dapat menghasilkan output berupa kontur yang sama dengan kontur referensi yang dihasilkan
B. . Interpolasi
Pada mesin CNC, sistem kontur biasanya terbentuk darikombinasi dari kontur linier dan kontur
circular. Interpolasi adalah proses pergerakan dua sumbu atau lebih dalam waktu yang sama untuk membentuk kontur atau lintasan yang diinginkan relative terhadap benda kerja. Untuk kontur linier,Persamaan interpolasi masing-masing sumbu adalah :
𝑋 = 𝑓. 𝑡 (1)
𝑌 = 𝑚 . 𝑓. 𝑡 (2)
Dimana 𝑚 adalah gradien garis yang diinginkan dan 𝑓 adalah frekuensi. Dengan adanya proses interpolasi ini, untuk membentuk suatu lintasan yang diinginkan hanya perlu mendefinisikan bentuk lintasan, koordinat awal dan koordinat akhir, serta frekuensinya. Sedangkan untuk kontur lingkaran untuk menetapkan jalur di sepanjang busur lingkaran, hanya titik awal dan akhir dan jari-jari yang diperlukan untuk menghasilkan busur lingkaran. Dalam kebanyakan kasus interpolasi melingkar terbatas pada satu kuadran, dan karena itu baik titik awal dan titik akhir harus berada di kuadran yang sama lingkaran. Untuk menghasilkan kontur lingkaran, maka harus memenuhi Persamaan 3, proses interpolasi mengubah suatu bentuk lintasan menjadi sinyal sinus untuk sumbu x dan sinyal kosinus untuk sumbu y ].
C. Perancangan Sistem
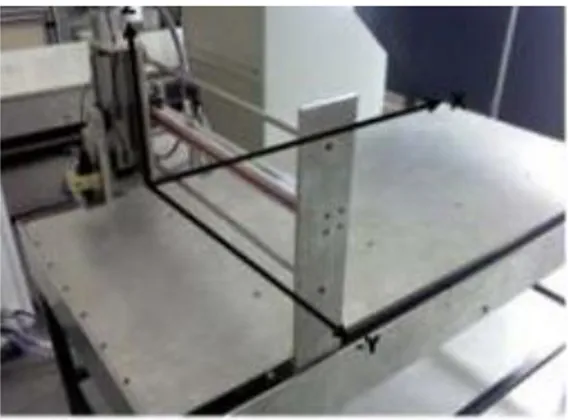
Sistem yang dirancang bertujuan untuk mensimulasikan mekanisme kerja mesin CNC untuk membuat kontur melalui pergerakan penggerak motor spindle. Dalam Tugas Akhir ini jenis kontur yang dapat dibuat dibatasi pada kontur linier dan circular. Kontur linier menghasilkan garis lurus, sedangkan kontur circular menghasilkan bentuk- bentuk lingkaran. Struktur sistem mekanik plant secara keseluruhan dapat dilihat
Gambar struktur sistem mekanik plant
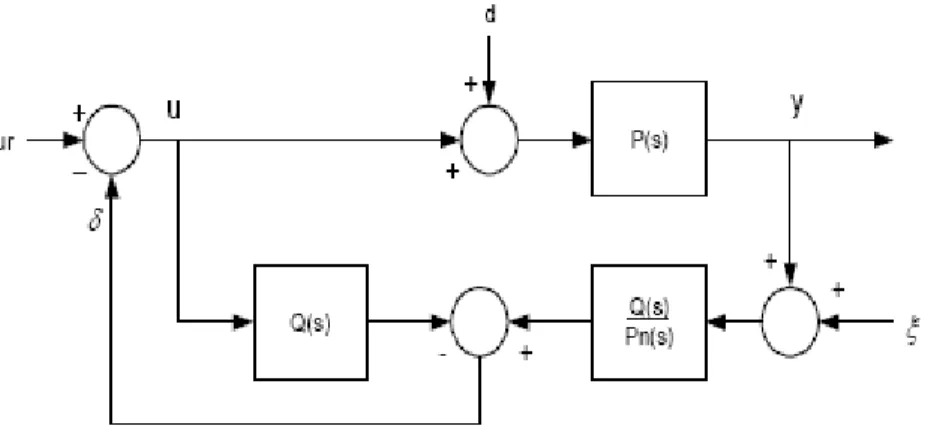
Pemakaian metode DOB pada struktur kontrol bertujuan untuk meningkatkan kemampuan tiap- tiap sumbu dalammeredam gangguan- gangguan yang muncul. Gangguan gangguan yang mungkin muncul pada plant diasumsikanterjadi akibat gejala kenonlinieran, seperti gesekan dan dan akibat dari perubahan parameter yang terjadi. Strukturkontroler DOB untuk satu sumbu ditunjukkan oleh Gambar 5.
Q (s) menunjukkan filter lowpass, P(s) menunjukkan plant yang akan dikontrol dan Pn (s) menunjukkan model nominal. Pada penelitian ini, melalui proses identifikasi dan pemodelan sistem dapat diketahui model nominal plant yaitu :
Pnx (s) = 0,6435 𝑠+20,63 𝑠+20,63(12)
Persamaan 12 adalah Persamaan untuk sumbu x, sedangkan model nominal untuk sumbu y ditunjukkan oleh Persamaan 13.
Pny(s) = 0,1416𝑠+3,046 𝑠+2,94 (13)
Langkah berikutnya dalam mendesain DOB adalah menentukan struktur filter Q. Penentuan struktur filter Q(s) berkaitan dengan pemilihan orde dan jenis filter yang akan dipakai. Blok (𝑠)/𝑃𝑛 (𝑠) yang terlihat pada struktur DOB di Gambar 5 menentukan orde minimum filter yang bias digunakan. Oleh karena itu pada penelitian Tugas Akhir ini model nominal plant telah dipilih sesuai dengan Persamaan maka orde filter yang bisa digunakan minimal filter orde 1. Jenis filter yang digunakan pada penelitian Tugas Akhir ini adalah filter low-pass Binomial dengan orde 1. Alasan pemilihan filter orde 1 adalah karena dengan memilih orde yang rendah maka akan diperoleh struktur yang sederhana dan mampu menghemat waktu komputasi. Struktur filter Binomial dinyatakan dengan Persamaan 11 dan dengan memasukkan nilai n= 1 dan r = 1 maka akan diperoleh Persamaan filter yang diinginkan, yaitu.
Q(s)= 1 𝜏𝑠+1(14)
(𝑠) 𝑃𝑛𝑥(𝑠) = 𝑠+20,63 𝜏𝑠+1 (0,6435 𝑠+20,63) (15) (𝑠) 𝑃𝑛𝑦(𝑠) = 𝑠+2.94 (𝜏𝑠+1)(0,1416 𝑠+3,046)(16)
D. Simulasi sistem
Dengan menggunakan kontroler yang telah didesain sebelumnya, dilakukan simulasi untuk membuat dua tipekontur, yaitu kontur linier dan kontur circular. Denganspesifikasi untuk kontur linier sepanjang 15 cm dan kontur circular dengan radius 7,5 cm. Pada pengerjaan Tugas Akhirini software yang digunakan adalah Labview 8.6 dengan versi Student Edition. Untuk mengukur performansi dari sistem yang telahdidesain digunakan suatu kriteria performansi
Integral AbsolutError (IAE). Pada kriteria performansi ini eror kontur aka ditambahkan terus menerus atau secara matematis dinyatakan oleh Persamaan 12.
𝐼𝐴𝐸 = 𝐽𝑒𝑐𝑗 (18)
1. Struktur tanpa Kontroler
Untuk simulasi awal, dilakukan uji coba simulasi sistem tanpa menggunakan kontroler. Ada dua jenis tipe kontur yang disimulasikan pada bab ini, yaitu kontur linier dan kontur circular. Gambar 6 menunjukkan hasil simulasi kontur linier tanpa kontroler secara keseluruhan dari kedua sumbu X dan sumbu Y. Untuk menghasilkan simulasi dari kedua sumbu secara bersamaan, sinyal dari sumbu x dan sumbu y harus melewati proses interpolasi. Proses ini menggunakan perhitungan yang sama dengan interpolator. Untuk hasil simulasi, dapat dilihat bahwa hasil keluaran dari sistem jauh lebih pendek jika dibandingkan dengan kontur referensi. Nilai IAE 4,58542
Gambar linier tanpa control
Hasil simulasi sistem tanpa kontroler untuk kontur circular ditunjukkan pada Gambar 7. Jari- jari lintasan pada kontur circular yang dihasilkan oleh sistem, jauh lebih kecildibandingkan dengan jari- jari lintasan kontur referensi. Untukkontur circular, nilai IAE nya sebesar 30,6231
2. Struktur dengan DOB
Dalam implementasi DOB, nilai time constant (T) dari filter harus di-tuning terlebih dahulu. Dari hasil tuning, performansi terbaik adalah ketika T bernilai 0,01 untuk sumbu x dan 0,25
untuk sumbu y.
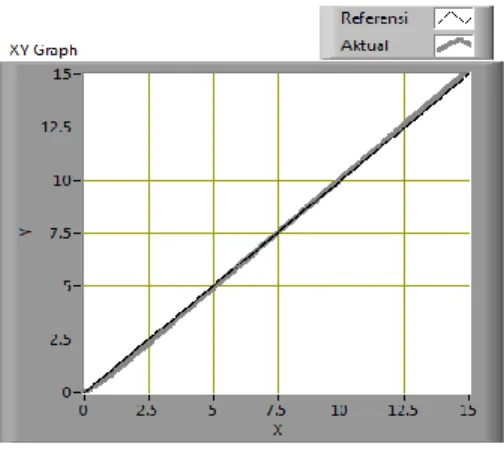
Gambar kontur linier dengan DOB
Gambar 8 menunjukkan hasil simulasi kontur linier dengan kontroler DOB secara keseluruhan dari kedua sumbu X dan sumbu Y. Dapat dilihat bahwa hasil keluaran dari sistem sudah mampu mengikuti lintasan referensi lebih baik dibandingkan dengan tanpa menggunakan kontroler dan telah mampu mengatasi disturbance yang diberikan. Nilai IAE dari sistem ini dengan kontroler DOB sebesar 0,294988.
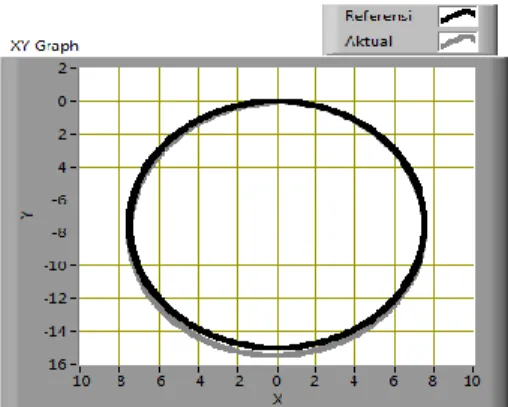
Gambar 9 merupakan hasil simulasi dengan DOB untuk kontur circular menunjukkan bagaimana sistem lebih mampu mengikuti sinyal referensi jauh lebih baik daripada sistem tanpa kontroler. Ketika diberi disturbance sistem sudah mampu mengatasinya dengan cukup baik. Sedangkan nilai IAE untuk kontur circular sebesar 0,126262.
Gambar kontur circle dengan DOB
E. kriteria performasi sistem
Secara keseluruhan kriteria performansi dari setiap hasil simulasi ditunjukkan oleh Tabel 1. Dapat ditunjukkan bahwa dengan ditambahkannya kontroler DOB pada sistem pengaturan gerakan tool prototipe Mesin CNC sangat mengurangi eror kontur yang ada. Hal ini dibuktikan dengan nilai Integral Absolute Error (IAE ) yang menurun drastis.
Metode control circle Linear Tanpa controler 30,621 4,58542
DOB 0,126262 0,294988
KESIMPULAN
Pada penelitian tugas akhir yang akan dilakukan, metode Disturbace Observer akan disusun dengan struktur
Decoupled- control yang telah diuji cobakan pada prototype mesin CNC untuk membentuk kontur linier dan kontur circular. Dari hasil simulasi implementasi , didapatkan kesimpulan sebagai berikut
Metode Disturbance Observer mampu mengatasi disturbances yang muncul pada sistem, namun kontur yang dihasilkan masih belum sempurna
Penggunaan DOB pada arsitektur kontrol decoupled yang sederhana untuk sistem interpolasi dua sumbu terbukti dapat memberikan pengaruh yang baik pada peningkatan performa system, hal ini ditunjukkandengan menurunnya nilai Integral Absolute Error ( IAE) dari 30,6231 menjadi 0,126262 untuk sumbu circular dan untuk sumbu linier dari 4,58542 menjadi 0,294988.
SARAN
Karena metode DOB yang telah didesain pada Tugas Akhir memakai filter maka kemampuan
sampling dari sistem akan mempengaruhi metode DOB yang dipakai. Selain itu untuk implementasi masih belum dapat diimplementasikan terkait dengan belum diketahuinya proses penanaman kontroler pada Labview Manual Driver yang terhubung dengan PCI – 1240 Utiliy. Oleh karena itu pada penelitian yang selanjutnya perlu diteliti lebih lanjut peningkatan sampling time terhadap kemampuan performa metode DOB dan dapat dilakukan proses implementasi sistem terhadap prototipe mesin CNC dengan mengembangkan kode G-Code.