PENAIK TEGANGAN DC 5 VOLT MENJADI TEGANGAN DC 24
VOLT DENGAN METODE SWITCHING POWER SUPPLY
TUGAS AKHIR
FLORENSI PALENTINA PASARIBU
142408040
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATRA UTARA
MEDAN
PENAIK TEGANGAN DC 5 VOLT MENJADI TEGANGAN DC 24 VOLT DENGAN METODE SWITCHING POWER SUPLLY
TUGAS AKHIR
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Ahli
Madya
FLORENSI PALENTINA PASARIBU 142408040
PROGRAM STUDI D3 FISIKA
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN
ALAM
UNIVERSITAS SUMATRA UTARA
MEDAN
PENGHARGAAN
Puji syukur penulis panjatkan ke hadirat TuhanYang Maha Esa,
berkat rahmat dan karuniaNya, penulis dapat menyelesaikan laporan tugas
akhir ini dengan berjudul Penaik Tegangan DC 5 volt menjadi Tegangan DC 24 volt dengan Metode Switching Power Supply.
Terima kasih penulis sampaikan kepada Bapak Drs.Achiruddin,MS
selaku dosen pembimbing penulis dan Ketua Jurusan Program studi D3
Fisika, Bapak Drs. Takdir Tamba, M.Eng.Sc, Dr. Kerista Sebayang, MS, selaku Dekan FMIPA USU. Seluruh dosen yang telah memberikan ilmu pengetahuan selama perkuliahan, yang membuka cakrawala berfikir serta
pengawai tata usaha yang ikut mensukseskan proses belajar mengajar. Rekan- rekan di D3 Fisika 2014, Khususnya Kartini Herawati terima kasih atas
motivasi, kritik dan sarannya terhadap tugas akhir ini. Penulis juga mengucapkan terima kasih kepada Agustina Situmorang,Febry Sitompul,Nisa Siregar,Monica Siregar yang telah memotivasi penulis dan menyelesaikan
Tugas akhir ini.Akhirnya terima kasih kepada Ayahanda dan Ibunda yang
telah memberikan didikan terbaik bagi penulis. Hanya Tuhan Yang Maha Esa
yang dapat membalas semua jasa dan kebaikan yang penulis terima dari berbagai pihak yang telah membantu dalam peyelesaian tugas akhir ini.
. Medan, Juli 2017
PENAIK TEGANGAN DC 5 VOLT MENJADI TEGANGAN DC 24 VOLT DENGAN METODE SWITCHING
ABSTRAK
Penelitian ini bertujuan untuk merancang dan merealasasikan sebuah alat yang memudahkan pemakainya dalam memenuhi kebutuhan tegangan beban (motor). Alat
ini berguna untuk menaikkan tegangan yang dibutuhkan beban saat tegangan masukan tetap (kurang dari yang dibutuhkan beban). Pada alat ini terdapat
mikrokontroler atmega328 yang berfungsi untuk mengatur seluruh komponen agar
dapat bekerja sesuai program yang sudah diatur. Pada alat tersebut terdapat PWM yang digunakan untuk memperbesar tegangan dengan mengatur siklus kerja
gelombang menggunakan saklar. Pada alat ini terdapat lcd yang berfungsi untuk menampilkan tegangan yang dapat diubah oleh PWM, dan terdapat juga led yang berfungsi untuk lampu tanda bahwa alat siap dijalankan.
ABSTRACT
This study aims to design and realixe a tool that allows the wearer in meeting the needs of the load voltage (motor). This tool is useful to raise the required load
voltage when the insert voltage is fixed (less than the load required). On this tool there is atmega328 microcontroller that serves to manage all components in order to work according to a program that is set. In the tool there is a PWM used to magnify the voltage by regulating the wave cycle of work using a switch. In this tool there is a
lcd that serves to display the voltage that can be changed by PWM , and there is also a led light for the sign that the tool is ready to run.
Persetujuan Pernyataan Penghargaan Abstrak Abstract Daftar isi Daftar tabel Daftar gambar BAB 1 PENDAHULUAN 1.1 Latar Belakang 1.2 Tujuan Penulisan 1.3 Perumusan Masalah 1.4 Batasan Masalah 1.5 Manfaat Penelitian DAFTAR ISI i ii iii iv v vi viii ix 1 1 2 2 2 1.6 Sistematika Penulisan BAB II LANDASAN TEORI 2.1 DC DC Konverter 2.1.1 System Buck converter 2.1.2 System Boost converter 2.1.3 System Buckboost converter 2.2Pulse Width Modulation (PWM) 2.3 Pulse Frequency Modulation (PFM) 2 5 6 7 10 11 2.4 PWM dengan ATMEGA8535 11 2.4.1 Mengaktifkan PWM1 pada Atmega8535 2.5 Mikrokontroler ATmega 328 BAB III RANCANGAN RANCANGAN DAN PEMBUATAN 3.1Diagram Blok Rangkaian 3.11 Fungsi Tiap Blok 3.1.2 Rangkaian Boost Konverter 3.1.3 Rangkaian Load 3.1.4 Rangkaian Rangkaian PWM generator 3.1.5 Rangkaian MikrokontrolerATmega328 3.1.6 Rangkaian PI Regulator BAB IV PENGUJIAN DAN PEMBAHASAN SISTEM 4.1 Pengujian Rangkaian Boost Konverter 4.2 Pengujian Mikrokontroler atmega328 4.3 Pengujian Hasil Boost Konverter BAB V KESIMPULAN DAN SARAN 13 13 18 19 20 22 23 24 25 35 36 37
5.1 Kesimpulan 5.1 Saran DAFTAR PUSTAKA LAMPIRAN 39 39
DAFTAR TABEL
2.1 Timer/Counter pada Mikrokontroler 16
3.2 Nilai Vout terhadap Vs berdasarkan duty cycle (D)
4.3 Tegangan Hasil Percobaan Menggunakan Boost Converter
21 37
DAFTAR GAMBAR Gambar 2.1 : Konverter DC-DC Tipe boost
Gambar 2.2 : Buck Boost Konverter Gambar 2.3: Mode CCM
7
7 8 Gambar 2.4 : Siklus Kerja Buck Boost Konverter Baik pada Switch on & off
Gambar 2.5 : Pulse With Modulation (PWM) Gambar 2.6 : Pulse Frekuensi Modulation (PFM) Gambar 2.7: Konfigurasi Pin ATMega328
Gambar 2.8 : Diagram Blok
Gambar 2.9 : Rangkaian Buck Bosst Konverter Gambar 2.10 : Rangkaian Load Cell
Gambar 3.1 : Rangkaian PWM Generator
Gambar 3.2 : Rangkaian Mikrokontroler Atmega328 Gambar 3.3 : Rangkaian Pengujian Buck boost Konverter Gambar 3.4 : Pengujian Rangkaian Mikrokontroler Atmega328 Gambar 3.5 : Grafik Boost Konverter
8 10 11 14 18 20 22 23 25 35 36 37
1.1Latar Belakang
BAB I PENDAHULUAN
Energi merupakan aspek kehidupan yang kini menjadi sorotan manusia diseluruh dunia.semakin menipisnya cadangan minyak bumi bahan bakar sebagai bahan bakar utama menyadarkan manusia untuk segera mencari alternatif pengganti
yang bersifat terbarukan dan juga lebih ramah lingkungan.Pada saat dc to dc menjadi salah satu sumber alternatif yang potensial untuk membantu memenuhi kebutuhan
energi.Pada sistem ini,penerapan dc to dc konverter telah memungkinkan suatu perangkat elektronika dapat berfungsi dengan menggunakan sumber energi baterai yang berukuran kecil dimana tegangan dapat diubah ubah sesuai kebutuhan pemakaian.
Sistem buckboost konveter merupakan salah satu regulator dc tipe switching
non-isolatep yang dapat menjawab kebutuhan akan sebuah sumber tegangan searah dengan tengan keluaran yang variabel.Dengan sistem buckboost,konverter ,nilai tengan dapat diatur untuk lebih besar maupun lebih kecil tengan masukkannya dengan mengatur besar lebar pulsa (duty cycle) dari PWM (pulse with
modulation).karna itu,dibandingkan dengan regulator dc tipe pensaklaran lainya
,buckboost konverter memiliki range tegangan keluaran yang lebih lebar
1.2Tujuan Penelitian
Adapun tujuan dari dibuatnya alat ini adalah :
1) Membuat suatu alat yang dapat digunakan menjadi salah satu sumber
alternatif yang potensial untuk membantu memenuhi kebutuhan energi listrik 2) Melakukan pengujian dan analisa rangkaian yang dirancang.
1.3 Perumusan Masalah
Adapun permasalahan dalam penelitian ini adalah bagaimana merancang penerapan dc to dc konverter suatu perangkat elektronika dapat berfungsi dengan
menggunakan sumber energi baterai yang berukuran kecil dimana tegangan dapat diubah ubah sesuai kebutuhan pemakaian.
1.4 Batasan Masalah
Mengingat pembahasan dalam perancangan alat yang dibuat ini dapat meluas, maka
tulisan ini mempunyai batasan masalah sebagai berikut :
1. Alat ini hanya bersifat menjad sumber energy baterai yang berukuran kecil
dimana tegangan keluarannya dapat diubah ubah sesuai kebutuhan pemakaianya.
2. Alat ini menggunakan mikrokontroler ATMega328
1.5 Manfaat Penelitian
Alat ini dapat digunakan menjd sumber tegangan dengan menggunakan baterai dimana tegangan keluaeanya dapat diubah ubah sesuai kebutuhan pemakaianya.
1.6 Sistematika Penulisan
Untuk mempermudah pembahasan dan pemahaman, maka penulis membuat proyek
ini sebagai berikut :
BAB 1 PENDAHUILUAN
Meliputi latar belakang masalah, rumusan masalah, tujuan penulisan,
BAB 2 LANDASAN TEORI
Dalam bab ini akan dijelaskan tentang teori pendukung yang digunakan untuk pembahasan rencana kerja dari rangkaian, yang meliputi arsitektur dan konstruksi dari mikrokontroler yang digunakan.
BAB 3 PERANCANGAN ALAT DAN PROGRAM
Meliputi tetang perancangan rangkain dan program yang digunakan BAB 4 PENGUJIAN DAN ANALISA
Meliputi pengujian alat dan analisanya BAB 5 KESIMPULAN DAN SARAN
Mengenai kesimpulan yang didapat setelah membuat proyek ini dan saran
yang diberikan demi pengembangan proyek ini dimasa yang mendatang. .
2.1 DC DC Konverter
BAB 2 TINJAUAN PUSTAKA
Dc-dc converter merupakan rangkaian elektronika power untuk mengubah suatu masukan tegangan dc menjadi tegangan dc keluaran dengan nilai yang lebih
besar atau kecil dari tegangan masukan. Pada laporan proyek ini rangkaian dc-dc konverter yang akan dibahas merupakan switched-mode dc-dc converter, atau biasa disebut dengan switching power supply. Tegangan dc masukkan dari proses dc-dc konverter tersebut adalah berasal dari sumber tegangan dc yang biasanya memiliki tegangan masukkan yang tetap. Pada dasarnya, tegangan keluaran dc yang ingin
mencapai adalah dengan cara pengaturan lamanya waktu perhubungan antara sisi keluaran dan sisi masukan pada rangkaian yang sama.
Switching
Input Dc voltage Element Output Dc voltage
Gambar 2.1 Dc-dc converter
Dasar dari swiching power supply terdiri dari tiga topologi yaitu buck (step-
down), boost (step-up) dan buckboost (step-up/down). Ketiga rangkaian dasar switching power supply ini merupakan nonisolated dc-dc converter dimana
masukkan dan keluaran dengan grounding yang sama. Pada dasarnya ada dua cara untuk meregulasi tegangan pada switching power sipply, yaitu dengan Pulse Width
Modulation (PWM) dan Pulse Frequency Modulation (PFM). Pengubah daya DC- DC (DC-DC Converter) tipe peralihan atau dikenal juga dengan sebutan DC
Chopper dimanfaatkan terutama untuk penyediaan tegangan keluaran DC yang bervariasi besarannya sesuai dengan permintaan pada beban. Daya masukan dari
tegangan masukan yang tetap. Pada dasarnya, penghasilan tegangan keluaran DC
yang ingin dicapai adalah dengan cara pengaturan lamanya waktu penghubungan
antara sisi keluaran dan sisi masukan pada rangkaian yang sama. Komponen yang
digunakan untuk menjalankan fungsi penghubung tersebut tidak lain adalah switch (solid state electronic switch) seperti misalnya Thyristor, MOSFET, IGBT, GTO. Secara umum ada dua fungsi pengoperasian dari DC Chopper yaitu penaikan tegangan dimana tegangan keluaran yang dihasilkan lebih tinggi dari tegangan
masukan, dan penurunan tegangan dimana tegangan keluaran lebih rendah dari tegangan masukan.
2.1.1 System Buck Konverter
Konverter Buck Konverter jenis buck merupakan jenis konverter yang banyak digunakan dalamindustri catu-daya. Konverter ini akan mengkonversikan tegangan dc masukan menjadi tegangan dc lain yang lebih rendah (konverter penurun tegangan).Rangkaian ini terdiri atas satu saklar aktif (MOSFET) dan satu saklar pasif (diode). Untuk tegangan kerja yang rendah, saklar pasif sering diganti dengan saklar aktif sehingga susut daya yang terjadi bisa dikurangi. Kedua saklar ini bekerja bergantian. Setiap saat hanya ada satu saklar yang menutup. Nilai rata-rata tegangan keluaran konverter sebanding dengan rasio antara waktu penutupan saklar aktif terhadap periode penyaklarannya (faktor kerja). Nilai faktor kerja bisa diubah dari nol sampai satu. Akibatnya, nilai rata-rata tegangan keluaran selalu lebih rendah dibanding tegangan masukannya.Beberapa konverter buck bisa disusun paralel untuk menghasilkan arus keluaran yang lebih besar. Jika sinyal ON-OFF masing-masing konverter berbeda sudut satu sama lainnya sebesar 360o/N, yang mana N
menyatakan jumlah konverter, maka didapat konverter dc-dc N-fasa. Konverter buck N-fasa inilah yang sekarang banyak digunakan sebagai regulator tegangan
mikroprosesor generasi baru. Dengan memperbanyak jumlah fasa, ukuran tapis yang diperlukan bisa menjadi jauh lebih kecil dibanding konverter dc-dc satu-fasa. Selain digunakan sebagai regulator tegangan mikroprosesor, konverter buck multifasa juga banyak dipakai dalam indusri logam yang memerlukan arus dc yang sangat besar pada tegangan yang rendah. Perlu dicatat bahwa arus masukan konverter buck selalu bersifat tak kontinyu dan mengandung riak yang sangat besar. Akibatnya pada sisi
masukan, konverter buck memerlukan tapis kapasitor yang cukup besar untuk mencegah terjadinya gangguan interferensi pada rangkaian di sekitarnya. Konverter dc-dc jenis buck biasanya dioperasikan dengan rasio antara teganan masukan
terhadap keluarannya tidak lebih dari 10. Jika dioperasikan pada rasio tegangan yang lebih tinggi, saklar akan bekerja terlalu keras sehingga keandalan dan efisiensinya turun. Untuk rasio yang sangat tinggi, lebih baik kalau kita memilih versi yang dilengkapi trafo
2.1.2 System Boost Konverter
Konverter boost berfungsi untuk menghasilkan tegangan keluaran yang lebih
tinggi dibanding tegangan masukannya, atau biasa disebut dengan konverter penaik
tegangan. Konverter ini banyak dimanfaatkan untuk aplikasi pembangkit
listrik tenaga surya dan turbin angin.Skema konverter jenis ini dapat dilihat pada
gambar 3 dan gambar 4, dimana komponen utamanya terdiri atas MOSFET, dioda,
induktor, dan kapasitor. Jika saklar MOSFET pada kondisi tertutup, arus akan mengalir ke induktor sehingga menyebabkan energi yang tersimpan di induktor naik.
Saat saklar MOSFET terbuka, arus induktor ini akan mengalir menuju beban
melewati dioda sehingga energi yang tersimpan di induktor akan turun. Rasio antara
tegangan keluaran dan tegangan masukan konverter sebanding dengan rasio antara periode penyaklaran dan waktu pembukaan saklar. Keunggulan dari konverter boostadalah mampu menghasilkan arus masukan yang kontiniu.
Gambar 2.1 . Rangkaian konverter DC-DC tipe boost
2.1.3 System Buckboost Konverter
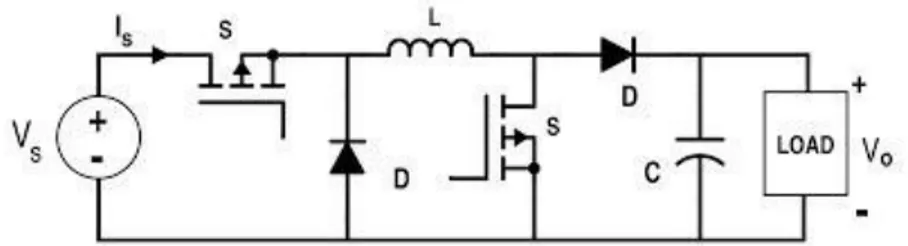
Buckboost konverter berfungsi untuk mengubah level tegangan DC, baik kelevel yang lebuh tinggi maupun yang lebih rendah. Namun buckboost konverter mengubah polaritas mengubah tegangan output terhadap tegangan input. Pada
gambar 2.6 merupakan rangkaian dasar buckboost konverter yang terdiri dari power MOSFET sebagai switching komponen. Induktor, dioda, kapasitor filter dan sebagai beban (RL).
Gambar 2.2 Buckboost converter
Induktor digunakan sebagai filter untuk mengurangi ripple arus. Sedangkan
kapasitor digunakan sebagai filter untuk mengurangi ripple tegangan. Dioda digunakan sebagai komponen switching yang berkerja pada keadaan switch open,
sehingga arus tetap mengalir ke induktor.
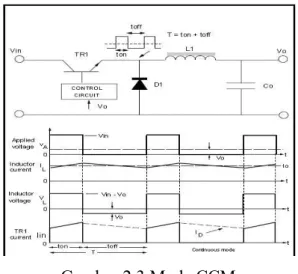
Buckboost konverter dapat dioprasikan dengan dua mode yaitu continuous
current mode (CCM) dan discontinous current mode (DCM). Continous current
mode ditandai oleh arus yang mengalir secara terus-menerus pada induktor selama
switching cycle-nya pada keadaan mantap (steady state). Sehingga pada CCM, tegangan output dapat diatur dengan mengubah duty cycle pada range 0-0,65. Selain
itu, mode CCM tidak tergantung dari nilai induktor dan kapasitor. Sedangkan discontinous current mode (DCM) ditandai dengan arus induktor menjadi nol pada setiap switching cycle-nya. Untuk mode DCM , tegangan output tergantung pada
nilai induktor dan besarnya duty cycle. Pada pembahasan ini, penulis menggunakan mode CCM. Bentuk sinyal IL, pada mode CCM dan DCM.
Pada rangkaian buckboodt ini, MOSFET power yang digunakan bertipe p-
chanel tegangan (-VDS) dan VGS(ON)untuk men-drive MOSFET sesuai dengan duty
cycle pada PWM. Keuntungan penggunaan MOSFET sebagai komponen utama
switching juga penting, parameter yang harus diperhatikan dalam pemilihan
MOSFET adlah VDS. ID, RDS(ON) dan frekuensi kerja maksimumnyayang harus
memenuhi dari spesifikasi yang kita butuhkan. Sehingga kerja dari rangkaian
buckboost dapat maksimal.Untuk MOSFET tipe p-chanel usahakan RDS(ON) sekecil
Gambar 2.3 Mode CCM
2.1.3.1 Prinsip Kerja Buckboost Konverter
Prinsip kerja rangkaian ini dibagi menjadi 2 mode yaitu mode 1 saat switch
di-ON-kan dan mode 2 saat switch di OFF kan. Siklus kerja buckboost konverter terlihat seperti pada gambar 2.9.
Gambar 2.4 Siklus kerja buckboost konverter baik pada saat switch ON dan OFF
Saat switch on, induktor mendapatkan tegangan dari input dan mengakibatkan adanya arus yang melewati induktor berdasarkan waktu dan dalam waktu yang sama kapasitor dalam kondisi membuang (discharge) dan menjadi sumber tegangan dan
arus pada beban.
Saat switch off, tegangan input terputus menyebabkan mulainya penurunan
arus dan menyebabkan ujung dioda bernilai negatif dan induktor mensuplay kapasitor (charge) dan beban. Jadi pada saat swich on arus beban disuplay oleh
kapasitor, namun pada saat switch off disuplay oleh induktor.
Besar dan kecilnya nilai tegangan output diatur berdasarkan duty cycle (D)
PWM pada switch. Bila D > 0,5 maka output akan lebih dari input. Sedangkan bila D < 0,5 mak output akan lebh kecil dari input dan Vin = Vout saat D = 0,5.
2.1.3.2 Ripple Arus pada Buckboost Konverter
Pada Switching power supply, fungsi dari induktor adalah sebaga
penyimpanan energi dan menentukan nilai ripple arus. Pada Gambar 2.12 merupakan
bentuk elombang arus induktor pada metode CCM dan DCM. Dimana VImin
merupakan low level dari mode CCM. Arus yang melewati induktor dapat dilihat dari persamaan berikut:
IL = = = ( ) (2.19)
Lmin = ( )
2.1.3.3 Power Losses dan Efisiensi Buckboost Konverter
Rugi-RUGI pada saat switchkonduksi diasumsikan arus ripple Induktor iL adalah nol dan arus dc yang mengalir adalah Is + Io. Power losses (PLS)
diperhitungkan untuk memperkirakan berapa nilai efisiensi dari rangkaian buckboost yang dirancang. Sehingga dari perkiraan ini, dapat ditentukan komponen yang cocok
dengan karakteritik dan spesifikasi rangkaian buckboost. Rangkaian equivalen
buckboost konverter dengan hambatan dalam dari masing-masing komponen terlihat
seperti Gambar 2.13.
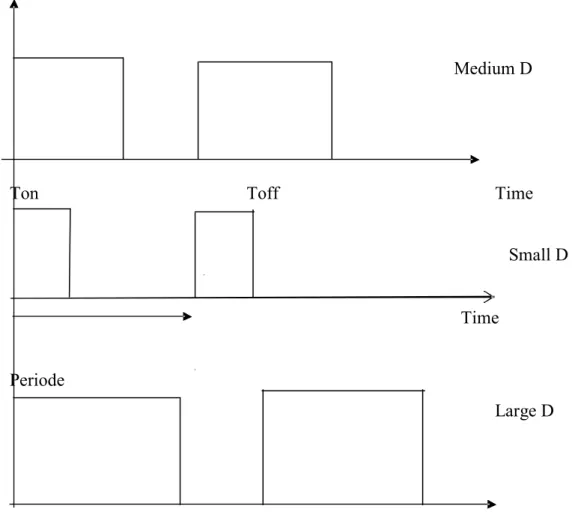
2.2 Pulse Width Modulation (PWM)
Merupakan suatu metode pengaturan tegangan dengan mengubah atau mengatur periode ON (Ton) pada tegangan berfrekuensi dengan periode frekuensi yang tetap atau sama. Siklus kerja ini didapatkan perbandingan antara lamanya tegangan pada nilai maksimum (Ton) dengan lamanya tegangan pada nilai minimum atau nol (Toff) dan biasa disebut duty cycle (D). Untuk menentukkan besarnya duty cycle digunakan
persamaan 2.1:
Ton Toff Periode Medium D Time Small D Time Large D
Gambar 2.5 Pulse Width Modulation (PWM)
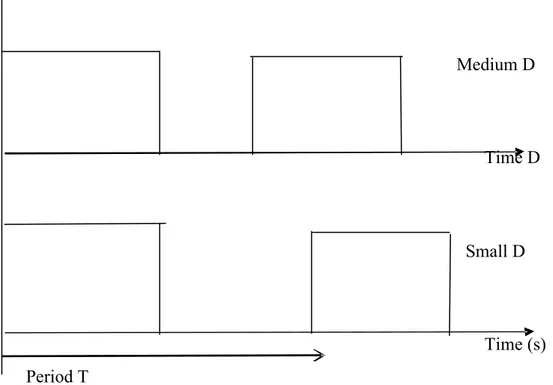
2.3 Pulse Frequency Modulation (PFM)
Merupakan suatu metode pengaturan tegangan dengan menjaga Ton tetap konstan dan periode switching (I) Dibuat variable terlihat seperti pada Gambar 2.3.
Kelemahan menggunakan metode ini salah satunya adalah sulitnya untuk mendesain LC filter yang tepat.
Period T
Medium D
Time D
Small D
Time (s)
Gambar 2.6 Pulse Frequency Modulation (PFM)
2.4 PWM dengan ATMEGA8535
Sinyal PWM dapat dibangun dengan banyak cara, bisa menggunakan metode abalog menggunakan rangkaian op-amp juga bisa dengan menggunakan metode digital.
Dengan metode analog setiap perubahan PWM-nya sangat halus, sedangkan
menggunakan metode digital setiap perubahan PWM dipengaruhi oleh resolusi dari
PWM itu sendiri. Misalkan PWM digital 8 bit berarti PWM tersebut memiliki
resolusi 28
=256, maksudnya nilai keluaran PWM ini memiliki 256. Variasi, variasinya mulai daro 0-255 yang mewakili duty cycle 0-100% dari keluaran PWM
tersebut. PWM dalam mikrokontroler AVR dibangkitkan oleh timer. Pada
mikrokontroler jeni AVR Atmega 8535 memiliki 3 buah timer di mana 2 timer 8 bit
sebuah timer 16 bit. Proses pembangkitan sinyal PWM pada mikrokontroler AVR. Terdapat beberapa parameter dimana parameter tersebut mempengaruhi nilai dari
1. Resolusi
Resolusi adalah jumlah variasi perubahan nilai dalam PWM tersebut. Misalkan suatu PWM memiliki resolusi 8 bit berarti PWM ini memiliki variasi
perubahan nilai sebanyak 28
= 256 variasi mulai daro 0-255 perubahan nilai, apabila
diberikan nilai melibihi dari batas resolusi tersebut maka akan terjadi overflow
maksudnya nilai yang diambil adalah sejumlah bit yang disediakan akan diambil mulai dari bit terendah (LSB). Kebanyakan dalam mikrokontroler 8 bit menggunakan
resolusi timer 8 bit. Pada Gambar 2.12 resolusi PWM digambarkan berawal dari dasar segitiga dan berakhir pada ujung segitiga.
2. Compare
Compare adalah nilai pembandingyang dijadikan referensi untuk menentukan
besar buty cycle dari PWM. Nilai compare bervariasi sesuai dengan resolusi dari PWM tersebut. Pada gambar 2.15 nilai compare ditandai dengan garis warna merah,
dimana posisinya diantara dasar segitiga dan ujung segitiga. 3. Clear
Clear digunakan untuk penentuan jenis komporator apakah komporator inverting atau noninverting. Dari Gambar 2.15 bila PWM ditur pada clear down,
berarti apabila garis segituga berada di bawah garis merah (compare) maka PWM
akan mengeluarkan logika 1. Dan sebaiknya apabila garis segitiga berda di atas garis
merah (compare) maka PWM akan mengeluarkan logika 0. Sehingga lebar
sempitnya logika 1 ditentukan oleh posisi compare, lebar sempitnya logika 1, itulah yang menjadi nilai keluaran PWM dan kejadian ini terjadi secara harmonik terus-
menerus. Maka dari itu nilai compare inilah yang dijadikan nilai duty cycle PWM. Clear UP adalah kebalikan (invers) dari Clear Down pada keluaran logikanya. Untuk
lebih jelas silahkan lihat Gambar 2.15 berikut: 4. Prescale
Prescale digunakan untuk menentukan waktu perioda dari pada PWM tersebu. Prescale bervariasi: 1,8, 32, 64, 128, 256, 1024. Maksud dari prescale adalah
saat prescale 64 di-set berarti timer/PWM akan menghitung 1 kali bila clock di CPU sudah 64kali, clock CPU adalah clok mikrokontroler itu sendiri (nilai clock
tergantung dari penggunaan XTAL). Period dari PWM dapat dihitung menggunakan rumus berikut:
T = (1/Clock CPU ) * Prescale * Resolusi
2.4.1 Mengaktifkan PWM1 pada Atmega8535
(2.29)
PWM1 padamikrokontroler ini memiliki 2 keluaran yaitu PWM1a
dikeluarkan pada port OCRIA (PORTD.5) dan PWM1b dikeluarkan dengan
mengubah timer 1 berikut dengan list program berbasis Basic Compiler (BASCOM): Config Timer1 = Pwm , Pwm = 8/9/10, Compare A Pwm = Clear Down/UP,
Compare B Pwm = Clear Down/Up, Prescale = 1/8/64/256/1024 Pwm1a = 50 :50 adalah compare
Pwm1b = 100 :100 adalah compare *ket: tanda miring (/) menandakan pilihan,
Pengaturan besar PWM dapat diatur nilai compare pada Pwm1a atau Ocrlal dan pada PWM1b atau Oclbl. Aplikasi yang sering digunakan untuk PWM pada
mikrokontroler ini adalah untuk kontrl kecepatan motor DC,FAN, mengatur terang
redupnya lampu DC dan sebagainya. Dalam hal ini PWM digunakan sebagai pembangkit switching pada buckboost konverter.
2.5 Mikrokontroler ATmega 328
Dalam penelitian ini mikrokontroler yang digunakan adalah Mkrokontroler
Atmega328 karena Atmega328 memiliki 32 bytedownloadable flash memory, 1 kByte Electrically Erasable Programmable Read-Only Memory (EERPOM), 2 kByte
iternal Static Random-Acess Memory (SRAM), 2 Timer/Counter 8 bit dan 1
Timer/Counter 16 bit, 6 kanal PWM, serial USART yang dapat diprogram dan frekuensi kerja dapat mencapai 20 MHz.
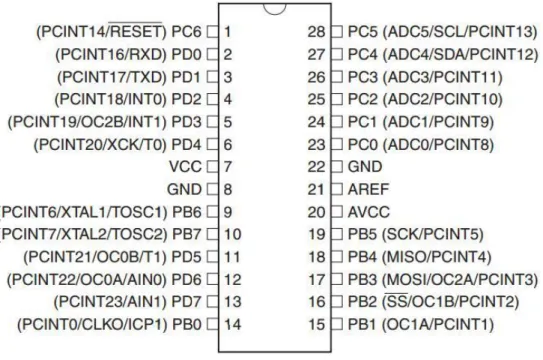
Gambar 2.7: Konfigurasi Pin A ATmega328
ATmega328 memiliki 3 buah PORT utama yatu PORTB, PORTC, dan PORTD, dan
PORTD dengan total pin input/output sebanyak 23 pin. PORT tersebut dapat
difungsikan sebagai input/output digital atau difungsikan sebagai periperal lainnya. 1. Port B
Port B merupakan jalur 8 bit yang dapat difungsikan sebagai input/output. Selain itu PORT B juga dapat memiliki fungsi alternatif seperti di bawah ini:
a. ICPI (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) DAN OC2 (PB3) dapat difungsikan sebagai keluaran PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur
komunikasi SPI.
d. Selain itu pin juga berfungsi sebagai jalur pemograman serial (ISIP). e. TOSCI (PB6) dan XTAL2 (PB7) merupakan sumber clock utama
mikrokontroler. 2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai input/output digital. Fungsi alternatif PORT C antara lain sebagai berikut:
a. ADC6 chanel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10 bit. ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog menjadi data digital.
b. 12C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORTC. 12C diguanakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data tipe 12C seperti sensor kompas, accelerometer nunchuck.
3. Port D
Port D merupakan jalur 8 bit yang masing-masing pin-nya juga dapat difungsikan sebagai input/output. Sama seperti port B dan Port C, Port D juga memiliki fungsi alternatif dibawah ini.
a. USART (TXD dan RXD) merupakan jalur data komunikais serial dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untuk menerima data serial.
b. Interrupt (INT0 dan INTI) merupakan pin dengan fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakan sebagai sebagai selaan dari program, misalkan sat program berjalan kemudian terjadi interupsi hardware/software maka program utama akan berhebti dan akan menjalankan program iterupsi.
c. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kita juga dapat memanfaatkan clock dari CPU, sehingga tidak perlu membutuhkan external clock.
d. T0 dan TI berfungsi sebagai masukkan counter external untuk timer 1 da timer 0.
e. AIN0 dan AIN1 keduanya merupakan masukkan input untuk analog komputer.
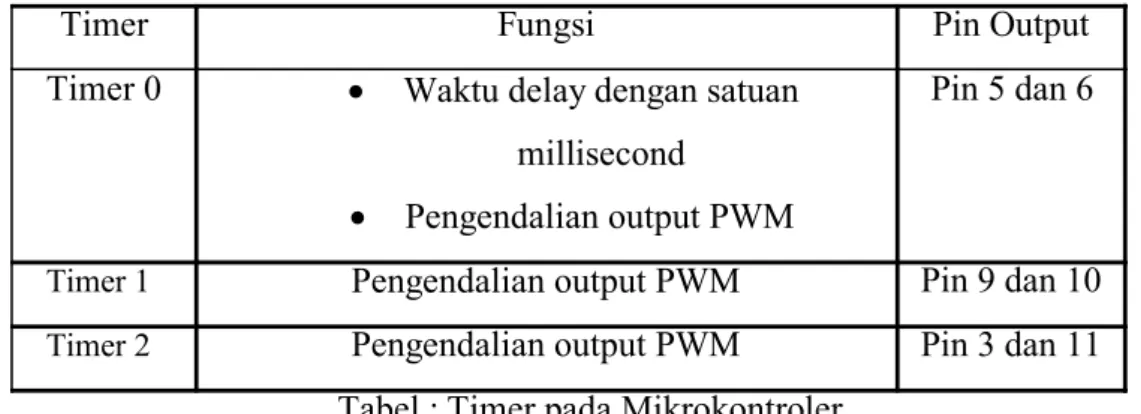
Timer/Counter pada Mikrokontroler
Ada 3 buah timer yang bersedia pada mikrokontroler ATmega328 dan dapat dikonfirgurasikan untuk memenuhi kebutuhan penggunaanya fungsi dan ketiga timer tersebut dapat dilihat pada table 2.4 berikut:
Timer Timer 0
Timer 1 Timer 2
Fungsi
Waktu delay dengan satuan millisecond
Pengendalian output PWM Pengendalian output PWM Pengendalian output PWM
Tabel : Timer pada Mikrokontroler
Pin Output Pin 5 dan 6
Pin 9 dan 10 Pin 3 dan 11
Dari ketiga timer tersebut, hanya 0 yang dilengkapi dengan ISR (Interrupt
Service Rountine) sehingga untuk keperluan PWM (Pulse Width Modulation) menggunakan timer 1 yang akan mengatur pin 9 dan 10 dan sedangakan timer 2
untuk mengatur pin 3 dan 11.
Hal yang perlu diperhatikan dalam menggunakan timer adalah sebagai
berikut:
1. Inisialisa
Inisialisa dilakukan untuk pertama kali untuk menentukan periode timer karena secara default bernilai satu detik.
2. Pengatur Periode
Mikrokontroler memiliki periode minimal 1 microdetik atau 1 MHz dan
periode maksimal 8388480 mikrodetil atau 8,3 detik. Pengaturan periode
akan merubah interrupt dan frekuensi kedua output PWM. 3. PWM
Pin output untuk timer 1 adalah pin 9 dan 10 sedangkan timer 2 memiliki output pin 3 dan 11. Duty cycle yang memiliki adalah 10 bit sehingga dapat
diatur mulai dari 0 sampai 1023. 4. Fungsi Interrupt
Pemanggilna fungsi interrupt dalam mikrodetik perlu diperhatikan dalam penggunaan fungsi interrupt karena akan berjalan pada frekuensi tinggi atau CPU tidak akan masuk program akan terkunci di fungsi interrupt.
5. Mematikan pin PWM
Dengan mematikan PWM maka pin tersebut dapat digunakan untuk fungsi yang lain.
Pada pemanfaatan sebagai counter, sinyal input yang dimasukkan dapat berupa low level atau falling edge trigger. Counter akan mencacah setiap masukkan yang ada sesuai inisialisasi harga awal dari counter pada nilai hitungan untuk tiap
sampling. Inisialisali harga awal ini berupa nilai preset negatif counter yang diatur
sebelum counter dijalankan. Demikian halnya dengan pemanfaatan timer yang
memerlukan inisialisasi awal berupa konstanta waktu yang menentukan sampai berapa lama akan terjadi roll over. Penentuan harga preset ini berhubungan dengan
penggunaan frekuensi clock dari sistem penentu waktu sampling dari counter untuk
mencacah suatu pulsa masukan dari luar dengan memanfaatkan kontrol interupsi
BAB 3 PERANCANGAN DAN PEMBUATAN
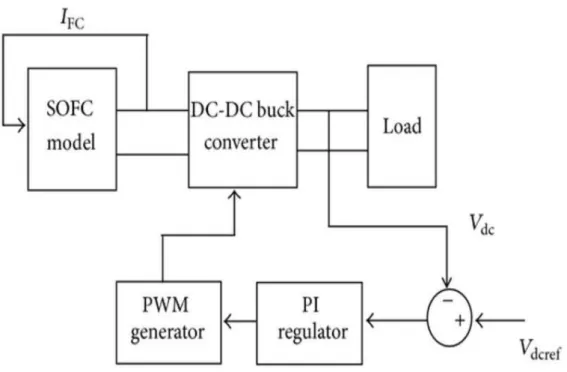
3.1 Diagram Blok Rangkaian
Adapun diagram blom dari rancangan alat yang dibuat adalah sebagai berikut :
3.1.1 Fungsi Tiap Blok 1. Buckboost Konverter 2. Load 3. SOFC model 4. PWM Generator 5. PI regulator
: Untuk mengubah tegangan DC, baik ke level
yang lebih tinggi maupun ke level yang lebih rendah.
: Untuk mendeteksi besarnya perubahan dimensi jarak yang disebabkan oleh suatu elemen gaya.
: Untuk mengkonversi secara langsung dari energi kimia menjadi energi listrik.
:Untuk pengatur gerak perangkat elektronika.
3.1.2 Rangkaian Buck boost Konverter
Buckboost Konverter adalah step up konverter atau konverter DC-DC dengan tegangan input. Konverter ini terdiri dari dua semikonduktor yaitu diode dan transistor, daya untuk boost konverter bisa datang dari sumber DC yang cocok
seperti baterai, panel surya boost konverter memiliki arus keluaran lebih kecil dari arus masukan dikarenakan tegangan output yang harus lebih besar sedangkan daya
output = daya input.
Gambar 3.2 Rangkaian Buck Boost Konverter
Buckboost konverter berfungsi untuk mengubah level tegangan DC, baik ke level yang lebih tinggi maupun ke level yang lebih rendah. Namun buckboost
konverter mengubah polaritas dari tegangan output terhadap tegangan input. Penggunaan buckboost konverter ini karena tegangan input dari solar cell selalu berubah berdasarkan perubahan berdasarkan intensitas cahaya yang jatuh pada permukaan solar cell.
Besar dan kecilnya bilangan output diatur berdasarkan duty cycle (D) PWM pada switch. Bila D > 0,5 maka output akan lebih besar dari input. Sedangkan bila D < 0,5 maka output akan lebih kecil dari input dan Vin = Vout saat D = 0,5.
Prisip Kerja Rangkaian
DC DC konverter yang digunakan adalah buckboost konverter dengan
kontrol PWM (Pulse Width Modulation). Buckboost konverter adalah tipe konverter yang berfungsi meregulasi tegangan input ke tegangan yang lebih rendah atau yang
lebih tinggi levelnya dengan polaritas yang berbeda dengan inputnya. Ada 4
komponen utama yaitu MOSFET sebagai saklar, dioda, induktor, kapasitor sebagai
filter dan resistor yang bisa dianggap sebagai beban. MOSFET digunakan sebagai
power komponen dan kontrol switching yang menggunakan PWM, di mana switching diaplikasikan dengan perbandingan Ton (waktu saat switch tertutup) dan T (waktu satu periode pulsa = Ton + Toff), atau diketahui dengan nama Duty cycle
(D).
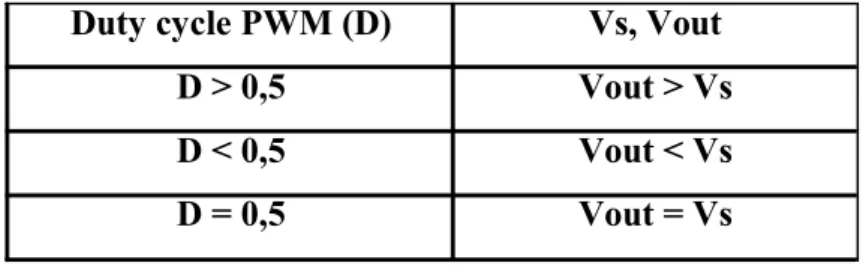
Perbedaan nilai duty cycle ini akan menyebabkan perubhan juga pada duty ratio pada komponen lain sehingga menyebabkan perubahan tegangan rata-rata pada output. Bila D > 0,5 maka nilai tegangan output akan lebih besar dari tegangan input
dan bila D < 0,5 maka tegangan output akan lebih kecil dari tegangan input. Tabel 3.1 Nilai Vout terhadap Vs berdasarkan duty cycle (D)
Duty cycle PWM (D) D > 0,5 D < 0,5 D = 0,5 Vs, Vout Vout > Vs Vout < Vs Vout = Vs
Saat switch on, induktor mendapat tegangan dari input dan mengakibatkan adanya arus yang melewati induktor berdasarkan waktu dalam waktu yang sama, kapasitor dalam kondisi membuang(discharge)dan menjadi sumber tegangan dan
arus pada beban. Saat switch off. Tegangan input yang terputus menyebabkan mulianya penuruna arus dan menyebabkan ujung dioda bernilai negatif dan induktor mensuplai capasitor (charge) dan beban. Jadi pada saat swtch on arus beban disuplai
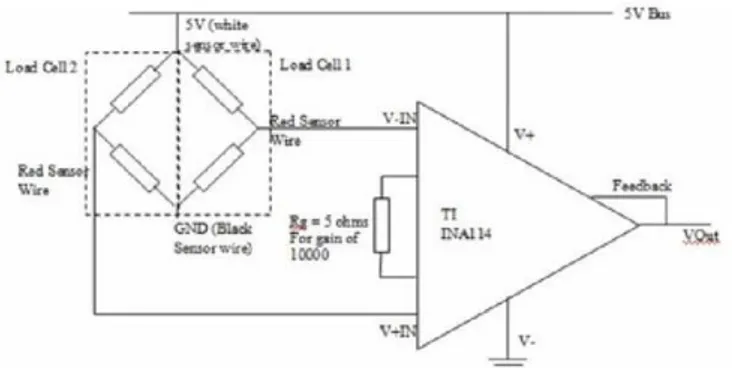
3.1.3 Rangkaian Load
Load cell adalah sebuah alat uji perangkat listrik yang dapat mengubah suatu energi menjadi energi lainnya yang biasa digunakan untuk mengubah suatu gaya
menjadi sinyal listrik.Perubahan dari satu system ke system lainnya ini tidak langsung terjadi dalam dua tahap saja tetapi harus melalui tahap-tahap pengaturan mekanikal, kekuatan dan energi dapat merasakan perubahan kondisi dari baik
menjadi kurang baik.Pada strain gauge (load cell) atau biasa disebut dengan
deformasi strain gauge. The strain gauge mengukur perubahan yang berpengaruh
pada strain sebagai sinyal listrik, karena perubahan efektif terjadi pada beban hambatan kawat listrik.
Gambar 3.3 Rangkaian Load Cell
Prinsip Kerja Rangkaian :
Cara kerja mirip dengan sensor tekanan yaitu mengubah gaya menjadi perpindahan
.Menggunakan rangkaian jembatan untuk pembacaan, kalibrasi dan kompensasi
temperatur Alternatif lain menggunakan kristal piezoelektrik untuk mengukur perubahan gaya.Aplikasi sensor loadcell pada timbangan paket pos digital, aplikasi
3.1.4 Rangkaian PWM Generator
Pulse Width Modulation (PWM) secara umum adalah sebuah cara memanipulasi
lebar sinyal yang dinyatakan dengan pulsa dalam satu periode, untuk mendapatkan
tegangan rata-rata yang berbeda. Bebarapa contoh aplikasi PWM adalah
pemodulasian data untuk telekomunikasi, pengontrolan daya atau tegangan yang
masuk ke beban, regulator tegangan, audio effect dan penguatan, serta aplikasi-
aplikasi lainnya. Aplikasi PWM berbasis mikrokontroller biasanya berupa pengendalian kecepatan motor DC, pengendalian motor servo, dan pengaturan nyala terang LED. Oleh karena itu diperlukan pemahaman terhadap konsep PWM itu
sendiri
Gambar 3.4Rangkaian PWM Generator
Prinsip Kerja:
Pulse Width Modulation atau sering di sebut dengan PWM adalah sebuah teknik yang sering digunakan didalam sistem pengontrolan kecepatan motor dan bisa mengatasi masalah pada starting motor yang jelek. PWM, bisa di analogikan seperti kegiatan naik sepeda. Sewaktu mengendarai sepeda, ada saat dimana mengayuh
pedal dan saat relaks atau kondisi santai (tidak mengayuh). Sadar atau tidak, Kita melakukan dua kondisi tersebut pada saat mengendarai sepeda. Ketika sepeda
melambat, misalkan pada jalan yang agak menanjak atau pada kondisi tertentu misalkan sewaktu melihat cewek cantik dan ingin mengejarnya, maka kita akan mengayuh pedal dengan lebih cepat dan kemudian setelah mencapai kondisi yang di
inginkan atau kita mungkin merasa capek maka kita akan memperlambat ayuhan pada pedal. Analogi PWM didapat dari perbandingan saat kita mengayuh sepeda dan melepaskannya. Nilai prosentase kita mengayuh akan berbanding lurus dengan medan yang kita lalui apakah menanjak, datar, ataukah menurun.Duty cycle adalah rasio atau perbandingan antara waktu kita mengayuh pedal dan waktu rilek / santai
(waktu ayuh + waktu santai). Duty cycle pada kondisi 100% berarti kita mengayuh pedal terus saat kita bersepeda / tanpa waktu santai misalkan seperti pembalap sepeda yang hampir sampai di garis finish, sedangkan kondisi duty cycle 50% berarti kita mengayuh pedal selama setengah dari waktu total kita mengayuh dalam bersepeda
3.1.5 Rangkaian MikrokontrolerATmega328
Mikorokntroler adalah sebuah sistem mikroprosesor dimana di dalamnya sudah terdapat CPU, ROM, RAM, I/O, clock dan peralatan internal lainnya yang sudah terhubung dan terorganisasi denagn baik oleh pabrik pembuatnya dan dikemas dalam satu chip yang siap dipakai. Sehingga, dengan demikian kita tinggal memprogram isi ROM sesuai dengan aturan oleh pabrik pembuatnya. Salah satu controh
mikrokontroler yang banyak beredar di pasaran adalah mikrokontroler ATMega 328.
3.1.6 Rangkaian PI Regulator
Konsep dasar penyearah gelombang adalah konsep penyearah gelombang dalam suatu power supply atau catu daya. Penyearah gelombang (rectifier) adalah bagian dari power supply / catu daya yang berfungsi untuk mengubah sinyal
tegangan AC (Alternating Current) menjadi tegangan DC (Direct Current). Komponen utama dalam penyearah gelombang adalah diode yang dikonfiguarsikan
secara forward bias. Dalam sebuah power supply tegangan rendah, sebelum tegangan AC tersebut di ubah menjadi tegangan DC maka tegangan AC tersebut perlu di
#include <mega328p.h> #include <stdio.h> #include <delay.h>
// Alphanumeric LCD functions #include <alcd.h>
unsigned char buf[33];
// Declare your global variables here // External Interrupt 0 service routine
interrupt [EXT_INT0] void ext_int0_isr(void) {
// Place your code here }
// External Interrupt 1 service routine
interrupt [EXT_INT1] void ext_int1_isr(void)
{
// Place your code here }
// Voltage Reference: AVCC pin
#define ADC_VREF_TYPE ((0<<REFS1) | (1<<REFS0) | (0<<ADLAR)) // Read the AD conversion result
unsigned int read_adc(unsigned char adc_input) {
ADMUX=adc_input | ADC_VREF_TYPE;
// Delay needed for the stabilization of the ADC input voltage delay_us(10);
// Start the AD conversion ADCSRA|=(1<<ADSC);
// Wait for the AD conversion to complete while ((ADCSRA & (1<<ADIF))==0); ADCSRA|=(1<<ADIF);
return ADCW; }
int b_volt1 (void) {
int vin, cnt; vin = 0;
for (cnt = 0; cnt < 50; cnt++) {
vin = vin + read_adc(0); } vin = vin / 50;
return vin; }
{
int vin, cnt; vin = 0;
for (cnt = 0; cnt < 50; cnt++) {
vin = vin + read_adc(1); } vin = vin / 50; return vin; } void main(void) {
// Declare your local variables here unsigned int teg1, teg2;
// Crystal Oscillator division factor: 1 #pragma optsize- CLKPR=(1<<CLKPCE); CLKPR=(0<<CLKPCE) | (0<<CLKPS3) | (0<<CLKPS2) | (0<<CLKPS1) | (0<<CLKPS0); #ifdef _OPTIMIZE_SIZE_ #pragma optsize+ #endif
// Input/Output Ports initialization // Port B initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRB=(0<<DDB7) | (0<<DDB6) | (0<<DDB5) | (0<<DDB4) | (0<<DDB3) | (0<<DDB2) | (0<<DDB1) | (0<<DDB0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T PORTB=(0<<PORTB7) | (0<<PORTB6) | (0<<PORTB5) | (0<<PORTB4) | (0<<PORTB3) | (0<<PORTB2) | (0<<PORTB1) | (0<<PORTB0);
// Port C initialization
// Function: Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In DDRC=(0<<DDC6) | (0<<DDC5) | (0<<DDC4) | (0<<DDC3) | (0<<DDC2) | (0<<DDC1) | (0<<DDC0);
// State: Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T
PORTC=(0<<PORTC6) | (0<<PORTC5) | (0<<PORTC4) | (0<<PORTC3) | (0<<PORTC2) | (0<<PORTC1) | (0<<PORTC0);
// Port D initialization
// Function: Bit7=In Bit6=In Bit5=In Bit4=In Bit3=In Bit2=In Bit1=In Bit0=In
DDRD=(0<<DDD7) | (0<<DDD6) | (0<<DDD5) | (0<<DDD4) | (0<<DDD3) | (0<<DDD2) | (0<<DDD1) | (0<<DDD0);
// State: Bit7=T Bit6=T Bit5=T Bit4=T Bit3=T Bit2=T Bit1=T Bit0=T PORTD=(0<<PORTD7) | (0<<PORTD6) | (0<<PORTD5) | (0<<PORTD4) | (0<<PORTD3) | (0<<PORTD2) | (0<<PORTD1) | (0<<PORTD0);
// Timer/Counter 0 initialization // Clock source: System Clock
// Clock value: Timer 0 Stopped // Mode: Normal top=0xFF // OC0A output: Disconnected // OC0B output: Disconnected
TCCR0A=(0<<COM0A1) | (0<<COM0A0) | (0<<COM0B1) | (0<<COM0B0) | (0<<WGM01) | (0<<WGM00); TCCR0B=(0<<WGM02) | (0<<CS02) | (0<<CS01) | (0<<CS00); TCNT0=0x00; OCR0A=0x00; OCR0B=0x00; // Timer/Counter 1 initialization // Clock source: System Clock // Clock value: Timer1 Stopped // Mode: Normal top=0xFFFF // OC1A output: Disconnected // OC1B output: Disconnected // Noise Canceler: Off
// Input Capture on Falling Edge // Timer1 Overflow Interrupt: Off // Input Capture Interrupt: Off // Compare A Match Interrupt: Off // Compare B Match Interrupt: Off
TCCR1A=(0<<COM1A1) | (0<<COM1A0) | (0<<COM1B1) | (0<<COM1B0) | (0<<WGM11) | (0<<WGM10); TCCR1B=(0<<ICNC1) | (0<<ICES1) | (0<<WGM13) | (0<<WGM12) | (0<<CS12) | (0<<CS11) | (0<<CS10); TCNT1H=0x00; TCNT1L=0x00; ICR1H=0x00; ICR1L=0x00; OCR1AH=0x00; OCR1AL=0x00; OCR1BH=0x00; OCR1BL=0x00; // Timer/Counter 2 initialization // Clock source: System Clock // Clock value: Timer2 Stopped // Mode: Normal top=0xFF // OC2A output: Disconnected // OC2B output: Disconnected ASSR=(0<<EXCLK) | (0<<AS2);
TCCR2A=(0<<COM2A1) | (0<<COM2A0) | (0<<COM2B1) | (0<<COM2B0) | (0<<WGM21) | (0<<WGM20);
TCCR2B=(0<<WGM22) | (0<<CS22) | (0<<CS21) | (0<<CS20); TCNT2=0x00;
OCR2A=0x00; OCR2B=0x00;
// Timer/Counter 0 Interrupt(s) initialization
TIMSK0=(0<<OCIE0B) | (0<<OCIE0A) | (0<<TOIE0); // Timer/Counter 1 Interrupt(s) initialization
TIMSK1=(0<<ICIE1) | (0<<OCIE1B) | (0<<OCIE1A) | (0<<TOIE1); // Timer/Counter 2 Interrupt(s) initialization
TIMSK2=(0<<OCIE2B) | (0<<OCIE2A) | (0<<TOIE2); // External Interrupt(s) initialization
// INT0: On
// INT0 Mode: Falling Edge // INT1: On
// INT1 Mode: Falling Edge
// Interrupt on any change on pins PCINT0-7: Off // Interrupt on any change on pins PCINT8-14: Off // Interrupt on any change on pins PCINT16-23: Off
EICRA=(1<<ISC11) | (0<<ISC10) | (1<<ISC01) | (0<<ISC00); EIMSK=(1<<INT1) | (1<<INT0);
EIFR=(1<<INTF1) | (1<<INTF0);
PCICR=(0<<PCIE2) | (0<<PCIE1) | (0<<PCIE0); // USART initialization
UCSR0B=(0<<RXCIE0) | (0<<TXCIE0) | (0<<UDRIE0) | (0<<RXEN0) | (0<<TXEN0) | (0<<UCSZ02) | (0<<RXB80) | (0<<TXB80);
// Analog Comparator initialization // Analog Comparator: Off
// The Analog Comparator's positive input is // connected to the AIN0 pin
// The Analog Comparator's negative input is // connected to the AIN1 pin
ACSR=(1<<ACD) | (0<<ACBG) | (0<<ACO) | (0<<ACI) | (0<<ACIE) | (0<<ACIC) | (0<<ACIS1) | (0<<ACIS0);
// Digital input buffer on AIN0: On // Digital input buffer on AIN1: On DIDR1=(0<<AIN0D) | (0<<AIN1D); // ADC initialization
// ADC Clock frequency: 62.500 kHz // ADC Voltage Reference: AVCC pin // ADC Auto Trigger Source: ADC Stopped
// Digital input buffers on ADC0: On, ADC1: On, ADC2: On, ADC3: On // ADC4: On, ADC5: On
DIDR0=(0<<ADC5D) | (0<<ADC4D) | (0<<ADC3D) | (0<<ADC2D) | (0<<ADC1D) | (0<<ADC0D);
ADCSRA=(1<<ADEN) | (0<<ADSC) | (0<<ADATE) | (0<<ADIF) | (0<<ADIE) | (1<<ADPS2) | (1<<ADPS1) | (1<<ADPS0);
ADCSRB=(0<<ADTS2) | (0<<ADTS1) | (0<<ADTS0); // SPI initialization
// SPI disabled
SPCR=(0<<SPIE) | (0<<SPE) | (0<<DORD) | (0<<MSTR) | (0<<CPOL) | (0<<CPHA) | (0<<SPR1) | (0<<SPR0);
// TWI initialization // TWI disabled
TWCR=(0<<TWEA) | (0<<TWSTA) | (0<<TWSTO) | (0<<TWEN) | (0<<TWIE); // Alphanumeric LCD initialization
// Connections are specified in the
// Project|Configure|C Compiler|Libraries|Alphanumeric LCD menu: // RS - PORTD Bit 0 // RD - PORTD Bit 1 // EN - PORTB Bit 6 // D4 - PORTD Bit 4 // D5 - PORTD Bit 5 // D6 - PORTD Bit 6 // D7 - PORTD Bit 7 // Characters/line: 16 lcd_init(16);
#asm("sei") lcd_gotoxy(0,0);
lcd_putsf("Volt DC-to-DC"); while (1)
{
// Place your code here teg1 = (( b_volt1() * 5) / 9); teg2 = (( b_volt2() * 13) / 12);
lcd_gotoxy(0,1);sprintf(buf,"V1:%01u.%02u V2:%02u.%01uV", teg1/10, teg1%10, teg2/10, teg2%10);
BAB IV PENGUJIAN DAN PEMBAHAN SISTEM 4.1 Pengujian Rangkaian Boost Konverter
Sebuah rangkaian boost converter yang merupakan DC-DC Converter jenisboost
adalah rangkaian penaik tegangan yang diimplementasikan dalam sistem Pembangkit
Listrik Tenaga Surya sebagai penaik tegangan dari tegangan keluaran panel surya.
Hasil pengujian dari rangkaian boost converter ini adalah merupakan hasil akhir dari perancangan yang telah direalisasikan. Perancangan awal akan menentukan hasil
akhir dari alat yang dirancang dan dibuat. Jadi hasil percobaan yang telah dilakukan
secara keseluruhan ditentukan oleh hasil dari perancangan. Hasil pengujian ini
meliputi cara kerja sistem rangkaian, hasil pengukuran rangkaian, dan analisa .
4.2 Pengujian Mikrokontroler atmega328
Gambar 4.1 : Pengujian Rangkaian Mikrokontroler Atmega328
Untuk memastikan rangkaian mikrokontroler dalam keadaan baik, maka dilakukan pengujian rangkaian. Pengujian dilakukan dngan cara merangkai rangkaian seperti pengujian rangkaian. Pengujian dengan cara merangkai rangkaian seperti terlihat pada gambar dan kemudian menginputkan program pada mikrokontroler tersebut. Berikut merupakan program sederhana yang diinputkan
untuk menguji rangkaian ini : void setup () { pinMode(13, OUTPUT); } void setup () { digitalWrite(13, HIGH) delay(1000) digitalWrite(13, LOW);
delay(1000); }
Ketika program tersebut berjalan, maka LED yang terhubung pada mikrokontroler
akan tampak berkedip dengan jeda waktu ertentu. Jika sudah dalam keadaan
demikian, maka dapat dikatakan rangkaian tersebut sudah beroperasi dengan baik
4.3 Pengujian Hasil Boost Konverter Vin 1,5 3 5 9 Vout max 2,01 15,8 29,7 31,5
Tabel 4.1 Tegangan Hasil Percobaan Menggunakan Boost Converter
35 30 25 20 Vin 15 10 5 0 Vout max 1 2 3 4 5 6 7
Analisa Data
Pengujian dilakukan pada, frekuensi yang sama, namun sumber teganan yang bervariasi, untuk mengetahui perbedaan tegangan keluaran antara Vinput yang satu dengan yang lain, serta tegangan keluaran puncak yang dihasilkan. Pengujian dilakukan dengan tegangan masukan baterai 1,5V-9V. Pengujian pada alat boost converter dilakukan tegangannya tidak lebih dari 9 volt, hal ini dilakukan agar menghindari kerusakan pada komponen-komponen yang terdapat pada alat tersebut.
Pada pengujian tersebut sumber daya dihubungkan pada LCD dengan
tegangan AC 220V, setelah LCD menyala, maka sumber percobaan dihubungkan menggunakan kabel konduktor, selanjutnya saklar diputar hingga penuh maka kita dapat melihat tegangan keluaran puncak pada LCD.
5.1 Kesimpulan
BAB V KESIMPULAN DAN SARAN
Berdasarkan hasil analisa dan pengujian dapat disimpulkan bahwa :
1. Buckboost dapat menghasilkan tegangan keluaran lebih besar dari tegangan
masukkan. Polaritas tegangan keluaran buckboost berbanding terbalik dengan
tegangan masukan (voltage inverting). .
2. Dari data analisa dan pengujian pada alat,Nilai Vin dan Nilai Vout tergantung dengan nilai PWM
5.2 Saran
1. Untuk pembuatan alat selanjutnya dapat dikembangkan dengan menambahkan alat penaik tegangan dengan menambahkan adaptor
Keng,Cu.1997.Pulse With Modulation Dc-Dc Converter.Jakarta.Library congress Cataloging
Widodo Budhi Romy, 2009. Embedded System Menggunakan Mikrokontroler dan Pemograman C. Yogyakarta. Penerbit ANDI https://www.slideshare.net/sidexabdullah/pulse-width-modulation-38956540 http://robotic-electric.blogspot.co.id/2012/11/pulse-width-modulation-pwm.html https://budihasian.wordpress.com/2013/10/18/pengenalan-pwm-pulse-width- modulation/ http://jendeladenngabei.blogspot.co.id/2012/11/dc-chopper-konverter-dc-dc.html https://indone5ia.wordpress.com/2011/09/02/sekilas-mengenai-konverter-dc-dc/ https://globalenergizer.wordpress.com/2014/01/15/tegangan-dc-step/