LAPORAN KEMAJUAN
PENELITIAN UNGGULAN DASAR
DANA ITS 2020
ANALISA PERFORMA HIDRODINAMIKA RESCUE BOAT
Tim Peneliti :
Prof. Ir. I Ketut Aria Pria Utama, M.Sc., Ph.D. (Teknik Perkapalan/FTK)
Dr. Ir. I Ketut Suastika, M.Sc. (Teknik Perkapalan/FTK)
Aries Sulisetyono, ST., MA.Sc., Ph.D (Teknik Perkapalan/FTK)
Jamal, ST., MT. (Teknik Perkapalan/FTK)
Sutiyo, ST. (Teknik Perkapalan/FTK)
DIREKTORAT RISET DAN PENGABDIAN KEPADA MASYARAKAT
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
Daftar Isi
Daftar Isi ... i
Daftar Tabel ... ii
Daftar Gambar ... iii
Daftar Lampiran ... iv
BAB I RINGKASAN ... 1
BAB II HASIL PENELITIAN... 2
2.1 Pembuatan Model Kapal ... 2
2.2 Analisis Hambatan dan Daya Mesin Kapal ... 4
2.2 Analisis Seakeeping Kapal ... 6
2.2.1 Titik Berat dan Jari-Jari Girasi ... 6
2.2.2 Respon Motion Kapal ... 8
BAB III STATUS LUARAN... 17
BAB IV PERAN MITRA (UntukPenelitian Kerjasama Antar Perguruan Tinggi) ... 18
BAB V KENDALA PELAKSANAAN PENELITIAN ... 19
BAB VI RENCANA TAHAPAN SELANJUTNYA ... 20
BAB VII DAFTAR PUSTAKA ... 21
BAB VIII LAMPIRAN... 22
Daftar Tabel
Tabel 2. 1 Ukuran Utama Kapal Rescue Boat ... 2
Tabel 2. 2 Nilai Hambatan Kapal ... 4
Tabel 2. 3 Kebutuhan Daya Kapal ... 5
Tabel 2. 4 Radius Girasi Model Lambung 1 ... 8
Tabel 2. 5 Radius Girasi Model Lambung 2 ... 8
Tabel 2. 6 Radius Girasi Model Lambung 3 ... 8
Tabel 2. 7 RMS Heave Motion ... 9
Tabel 2. 8 RMS Roll Motion ... 11
Daftar Gambar
Gambar 2. 1 Model 3D Lambung Kapal 1 ... 3
Gambar 2. 2 Model 3D Lambung Kapal 2 ... 3
Gambar 2. 3 Model 3D Lambung Kapal 3 ... 4
Gambar 2. 4 Hambatan Kapal ... 5
Gambar 2. 5 Kebutuhan Daya Kapal (EHP) ... 6
Gambar 2. 6 RMS Heave Motion Dengan Tinggi Gelombang 0.5 meter ... 9
Gambar 2. 7 RMS Heave Motion Dengan Tinggi Gelombang 1 meter ... 10
Gambar 2. 8 RMS Heave Motion Dengan Tinggi Gelombang 1.5 meter ... 10
Gambar 2. 9 RMS Heave Motion Dengan Tinggi Gelombang 2 meter ... 11
Gambar 2. 10 RMS Roll Motion Dengan Tinggi Gelombang 0.5 meter ... 12
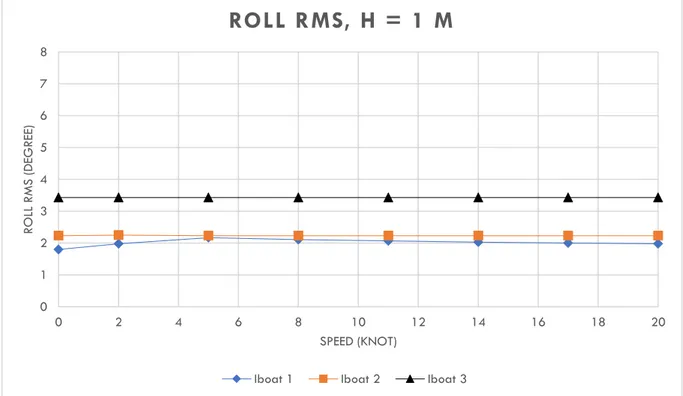
Gambar 2. 11 RMS Roll Motion Dengan Tinggi Gelombang 1 meter ... 12
Gambar 2. 12 RMS Roll Motion Dengan Tinggi Gelombang 1.5 meter ... 13
Gambar 2. 13 RMS Roll Motion Dengan Tinggi Gelombang 2 meter ... 13
Gambar 2. 14 RMS Pitch Motion Dengan Tinggi Gelombang 0.5 meter ... 15
Gambar 2. 15 RMS Pitch Motion Dengan Tinggi Gelombang 1 meter ... 15
Gambar 2. 16 RMS Pitch Motion Dengan Tinggi Gelombang 1.5 meter ... 16
BAB I RINGKASAN
Instruksi Menteri Perhubungan Republik Indonesia Nomor IM 10 Tahun 2018 adalah untuk menyelenggarakan keamanan dan ketertiban di dalam Daerah Lingkungan Kerja dan Daerah Lingkungan Kepentingan pelabuhan bagi pengguna moda transportasi serta melakukan koordinasi dengan instansi terkait. Kondisi cuaca masih berkontribusi signifikan terhadap kecelakaan kapal, Hal tersebut juga menjadi salah satu faktor penghambat operasi SAR (Search And Rescue) untuk mengevakuasi korban kecelakaan kapal di wilayah tersebut. Sebagai pihak yang bertanggung jawab menyelenggarakan pencarian dan pertolongan pada kecelakaan kapal, BASARNAS memerlukan keterampilan dari crew maupun keandalan armada yang digunakan untuk operasi SAR. Operasi pencarian dan pertolongan khususnya pada kecelakaan kapal, dibutuhkan kecepatan dan kehandalan dari armada kapal rescue dalam menghadapi tantangan kondisi cuaca dan gelombang laut yang ekstrem. Studi performance hidrodinamika rescue boat sangat penting dilakukan untuk mengetahui kemampuan kapal bertahan dalam kondisi berbahaya saat beroperasi. Performance hidrodinamika rescue boat antara lain: Hambatan, Daya, Olah Gerak dan Maneuver. Maka dari itu, diperlukan sebuah desain rescue boat yang mampu berakselerasi tinggi dan dapat menembus berbagai kondisi laut yang ekstrem. Rescue boat diperlukan juga kapal cepat yang berada di masing-masing pelabuhan yang berfungsi debagai kapal penyelamat. Hal ini menjadi penting karena tingkat kecelakaan kapal di Indonesia cukup tinggi. Hal ini sangat perlu dipertimbangkan karena Indonesia sedang berjalan menuju poros maritim dunia dan memerlukan penanggulangan yang representatif.
Ringkasan penelitian berisi latar belakang penelitian,tujuan dan tahapan metode penelitian, luaran yang ditargetkan, kata kunci
BAB II HASIL PENELITIAN
2.1 Pembuatan Model Kapal
Pembuatan geometri kapal rescue boat dilakukan dengan menggunakan bantuan perangkat lunak design modeler sesuai dengan ukuran utama kapal yang telah didesain. Berikut akan dilampirkan ukuran utama dari kapal rescue boat yang digunakan dalam pengujian dapat dilihat pada Tabel 2. 1.
Tabel 2. 1 Ukuran Utama Kapal Rescue Boat
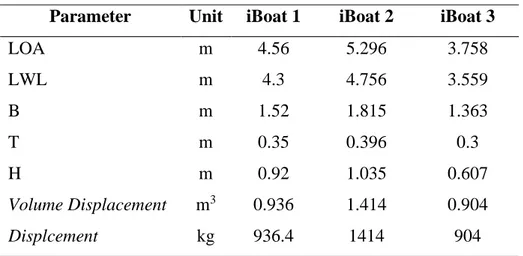
Parameter Unit iBoat 1 iBoat 2 iBoat 3
LOA m 4.56 5.296 3.758 LWL m 4.3 4.756 3.559 B m 1.52 1.815 1.363 T m 0.35 0.396 0.3 H m 0.92 1.035 0.607 Volume Displacement m3 0.936 1.414 0.904 Displcement kg 936.4 1414 904
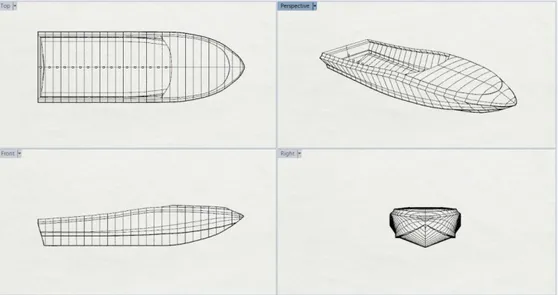
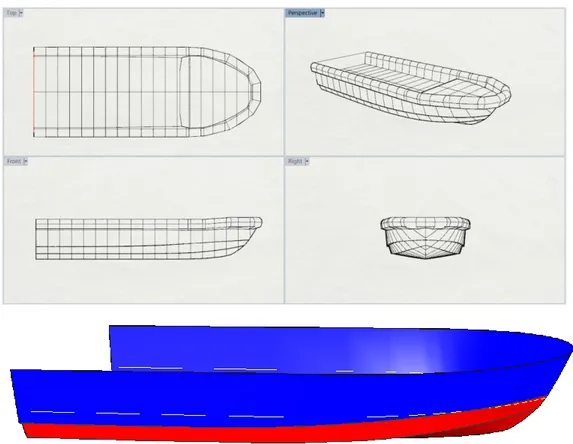
Dari Tabel 2. 1 dapat dilihat bahwa terdapat tiga model lambung kapal yang akan dianalisis performa hidrodinamikanya. Ketiga model lambung tersebut memiliki ukuran utama yang berbeda beda, dimana ukuran kapal yang terbesar merupakan model lambung kapal 2 dengan panjang 5.296 meter dengan displacement sebesar 1414 kg dan model lambung kapal dengan ukuran paling kecil yaitu model lambung kapal 3 dengan panjang 3.758 meter dengan displacement sebesar 904 kg. Untuk melakukan pengujian hidrodinamika ketiga lambung kapal ini dimodelkan dengan bantuan perangkat lunak permodelan tiga dimensi untuk mendapatkan bentuk lambung (hull form) sehingga nantinya model tiga dimensi lambung kapal tersebut akan diuji performa hidrodinamikanya dengan menggunakan perangkat lunak Computational Fluid Dynamic (CFD). Untuk memberikan gambaran terkait bentuk ketiga model lambung kapal dapat dilihat pada Gambar 2. 1, Gambar 2. 2, Gambar 2. 3 yang merupakan ilutrasi tiga dimensi dari model lambung kapal.
Gambar 2. 1 Model 3D Lambung Kapal 1
Gambar 2. 3 Model 3D Lambung Kapal 3
2.2 Analisis Hambatan dan Daya Mesin Kapal
Analisis terkait nilai hambatan dari ketiga model lambung kapal dilakukan dengan bantuan perangkat lunak CFD. Perhitungan hambatan kapal dilakukan pada kecepatan tertentu, pada penelitian ini rentang kecepatan dalam pengujian nilai hambatan kapal yaitu dalam rentang kecepatan 2 knot sampai dengan 20 knot. Berikut merupakan hasil pengujian hambatan dapat dilihat pada Tabel 2. 2.
Tabel 2. 2 Nilai Hambatan Kapal
Kecepatan Hambatan (N)
Knot m/s Fr iBoat 1 iBoat 2 iBoat 3
2 1,03 0,16 23,08 30,23 54,39 5 2,57 0,40 271,32 344,92 337,43 8 4,12 0,63 1333,82 2140,17 1396,72 11 5,66 0,87 1564,07 2480,00 1742,06 14 7,20 1,11 1636,98 2534,98 1580,52 17 8,74 1,35 1603,44 2413,23 1416,47 20 10,29 1,58 1594,72 2315,35 1322,57
Gambar 2. 4 Hambatan Kapal
Dapat dilihat pada Tabel 2. 2 dan Gambar 2. 4 bahwa dalam kecepatan operasi 20 knot nilai hambatan yang paling kecil merupakan model lambung kapal 3 dan nilai hambatan terbesar model lambung 2. Dalam pengujian hambatan ini terdapat beberapa rumusan empiris yang digunakan. Pada kecepatan 2 knot dan 5 knot perhitungan hambatan menggunakan metode Holtrop. Pada kecepatan 8 knot digunakan metode Savitsky Pre-Planing. Dan pada kecepatan 11 knot sampai dengan 20 knot digunakan metode Savitsky Planing.
Tabel 2. 3 Kebutuhan Daya Kapal
Kecepatan Power (kW)
Knot m/s Fr iBoat 1 iBoat 2 iBoat 3
2 1,03 0,16 0,02 0,03 0,06 5 2,57 0,40 0,70 0,89 0,87 8 4,12 0,63 5,49 8,81 5,75 11 5,66 0,87 8,85 14,03 9,86 14 7,20 1,11 11,79 18,26 11,38 17 8,74 1,35 14,02 21,10 12,39 20 10,29 1,58 16,41 23,82 13,61 0 500 1000 1500 2000 2500 3000 2 5 8 1 1 1 4 1 7 2 0 H A MB A TAN (N) KECEPATAN (KNOT) iBoat 1 iBoat 2 iBoat 3
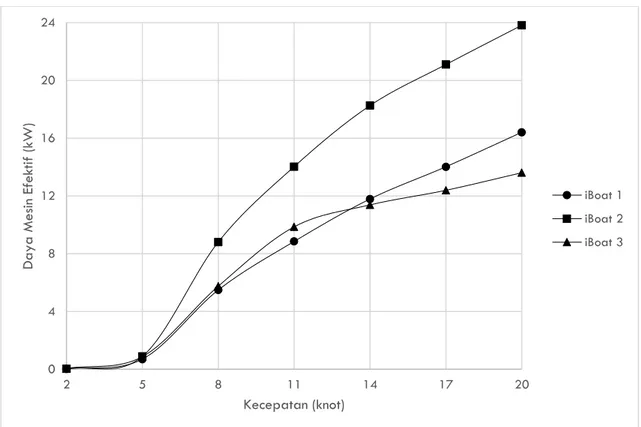
Gambar 2. 5 Kebutuhan Daya Kapal (EHP)
Dapat dilihat pada Tabel 2. 3 dan Gambar 2. 5 bahwa nilai kebutuhan daya berbanding lurus dengan nilai hambatan kapal, sehingga semakin besar nilai hambatan kapal maka semakin besar juga kebutuhan daya kapal yang dibutuhkan oleh kapal ketika beroperasi dalam kecepatan tertentu. Dapat dilihat juga bahwa nilai kebutuhan daya terkecil pada kecepatan 20 knot sebesar 13.61 kW yaitu pada model lambung kapal 2. Dan nilai kebutuhan daya terbesar pada kecepatan 20 knot sebesar 23.82 kW yaitu pada model lambung kapal 2. Sehingga dari segi nilai hambatan dan kebutuhan daya kapal model lambung kapal 3 merupakan model lambung terbaik dari ketiga model lambung kapal yang di analisis.
2.2 Analisis Seakeeping Kapal
Analisis seakeeping dilakukan dengan menggunakan bantuan perangkat lunak. Analisa dilakukan pada kecepatan operasi 2 knot sampai dengan 20 knot, sesuai dengan kecepatan yang dianalisa pada analisa hambatan dan daya mesin kapal. Analisis seakeeping dilakukan pada empat variasi tinggi gelombang yaitu 0.5 meter, 1.0 meter, 1.5 meter, dan 2.0 meter.
2.2.1 Titik Berat dan Jari-Jari Girasi
Penentuan koordinat titik berat dihitunga relative terhadap titik sumbu referensi x, y dan z. pada kasus ini titik 0 sumbu x, y terletak di bagian belakang badan kapal dan sumbu z terletak di baseline kapal. Titik berat dan jari-jari girasi dihitung secara pos per pos dimana benda dibagi menjadi beberapa bagian kemudian dihitung titik berat tiap bagian kemudian dari titik berat tiap
0 4 8 12 16 20 24 2 5 8 11 14 17 20 Day a Me sin E fe kt if (k W) Kecepatan (knot) iBoat 1 iBoat 2 iBoat 3
bagian dapat digabungkan untuk mendapatkan titik berat sesungguhnya. Karena model 3D system merupakan model surface maka acuan titik berat dihitung dengan menggunakan luasan dari surface. Berikut merupakan formula umum yang digunkana dalam menghitung titik berat benda.
𝑋 =𝐴1𝑋1+ 𝐴2𝑋2+ 𝐴3𝑋3+. . . +𝐴𝑖𝑋𝑖 𝐴𝑇𝑜𝑡𝑎𝑙 (2.1) 𝑌 =𝐴1𝑌1+ 𝐴2𝑌2+ 𝐴3𝑌3+. . . +𝐴𝑖𝑌𝑖 𝐴𝑇𝑜𝑡𝑎𝑙 (2.2) 𝑌 =𝐴1𝑍1 + 𝐴2𝑍2+ 𝐴3𝑍3+. . . +𝐴𝑖𝑍𝑖 𝐴𝑇𝑜𝑡𝑎𝑙 (2.3) Dimana
X, Y, Z = Koordinat titik berat dari titik referensi (m) A = Luasan Surface (m2)
I = Surface ke-i
Untuk formula umum yang digunakan dalam perhitungan jari jari girasi yaitu sebagai berikut: 𝑘𝑥𝑥 = √ ∑ 𝐴𝑖(𝑦𝑖2+ 𝑧 𝑖2) ∑ 𝐴𝑖 (2.4) 𝑘𝑦𝑦 = √∑ 𝐴𝑖(𝑥𝑖 2+ 𝑧 𝑖2) ∑ 𝐴𝑖 (2.5) 𝑘𝑧𝑧 = √ ∑ 𝐴𝑖(𝑥𝑖2+ 𝑦 𝑖2) ∑ 𝐴𝑖 (2.6) Dimana
kxx = Radius girasi di sumbu putar x
kyy = Radius girasi di sumbu putar y
kzz = Radius girasi di sumbu putar z
x = Koordinat titik pusat di sumbu x y = Koordinat titik pusat di sumbu y z = Koordinat titik pusat di sumbu z i = Benda ke-i
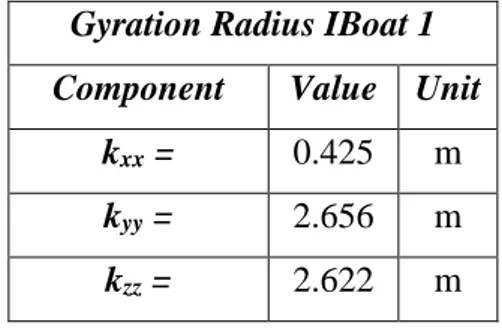
Dari hasil perhitungan jari jari girasi dengan metode seperti yang dijelaskan sebelumnya didapatkan nilai jari-jari girasi untuk setiap model kapal yang ditinjau yaitu dapat dilihat pada Tabel 2. 4, Tabel 2. 5, dan Tabel 2. 6. Pada perhitungan untuk setiap benda didapatkan radius girasi pada
sumbu putar y memiliki nilai yang terbesar. Kyy merupakan nilai girasi yang mempengaruhi
Gerakan pitch benda.
Tabel 2. 4 Radius Girasi Model Lambung 1
Gyration Radius IBoat 1
Component Value Unit
kxx = 0.425 m
kyy = 2.656 m
kzz = 2.622 m
Tabel 2. 5 Radius Girasi Model Lambung 2
Gyration Radius IBoat 2
Component Value Unit
kxx = 0.511 m
kyy = 3.221 m
kzz = 3.181 m
Tabel 2. 6 Radius Girasi Model Lambung 3
Gyration Radius IBoat 3
Component Value Unit
kxx = 0.610 m
kyy = 2.113 m
kzz = 2.023 m
2.2.2 Respon Motion Kapal
Respon gerak dari kapal akibat gelombang dengan kecepatan operasi tertentu ditentukan dengan RMS. Untuk gerak vertikal (heave) diberikan dalam satuan meter, untuk gerak rotasi secara memanajang kapal (pitch) diberikan dalam sudut pitch, dan untuk gerak rotasi secara melintang kapal (roll) diberikan dalam sudut roll. Berikut akan diberikan tabel dan grafik yang manggambarkan respon gerak kapal ketika beroperasi di perairan bergelombang.
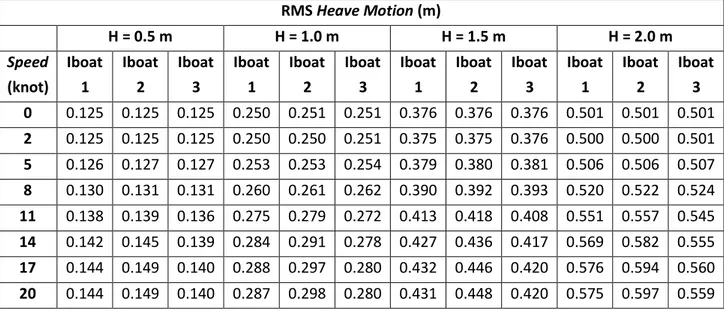
Tabel 2. 7 RMS Heave Motion RMS Heave Motion (m) H = 0.5 m H = 1.0 m H = 1.5 m H = 2.0 m Speed (knot) Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 0 0.125 0.125 0.125 0.250 0.251 0.251 0.376 0.376 0.376 0.501 0.501 0.501 2 0.125 0.125 0.125 0.250 0.250 0.251 0.375 0.375 0.376 0.500 0.500 0.501 5 0.126 0.127 0.127 0.253 0.253 0.254 0.379 0.380 0.381 0.506 0.506 0.507 8 0.130 0.131 0.131 0.260 0.261 0.262 0.390 0.392 0.393 0.520 0.522 0.524 11 0.138 0.139 0.136 0.275 0.279 0.272 0.413 0.418 0.408 0.551 0.557 0.545 14 0.142 0.145 0.139 0.284 0.291 0.278 0.427 0.436 0.417 0.569 0.582 0.555 17 0.144 0.149 0.140 0.288 0.297 0.280 0.432 0.446 0.420 0.576 0.594 0.560 20 0.144 0.149 0.140 0.287 0.298 0.280 0.431 0.448 0.420 0.575 0.597 0.559
Dari Tabel 2. 7 dapat dilihat bahwa pada rentang kecepatan 0 knot sampai dengan 8 knot respon heave motion pada kapal cenderung memiliki nilai respon yang sama. Akan tetapi pada rentang kecepatan diatas 8 knot respon ketidag model lambung kapal mulai berubah, hal ini disebabkan pada kondisi kecepatan ini kapal mulai masuk dalam kondisi pre planing hingga planing dimana sudah mulai adanya gaya angkat dari fluida sehingga bisa mengangkat berat kapal. Dapat dilihat bahwa pada kecepatan operasi 20 knot lambung kapal 3 memiliki respon yang kecil untuk heave motion yaitu sebesar 0.14 – 0.559 meter untuk tinggi gelombang 0.5 hingga 2 meter.
Gambar 2. 6 RMS Heave Motion Dengan Tinggi Gelombang 0.5 meter 0,12 0,125 0,13 0,135 0,14 0,145 0,15 0,155 0 2 4 6 8 10 12 14 16 18 20 H EAV E RMS ( M) SPEED (KNOT)
HEAVE RMS, H = 0.5 M
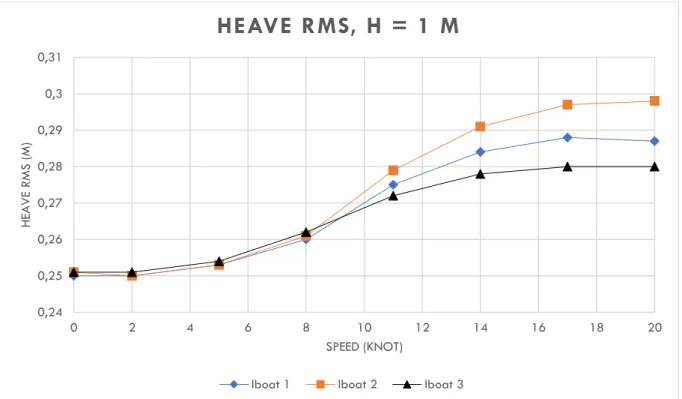
Gambar 2. 7 RMS Heave Motion Dengan Tinggi Gelombang 1 meter
Gambar 2. 8 RMS Heave Motion Dengan Tinggi Gelombang 1.5 meter 0,24 0,25 0,26 0,27 0,28 0,29 0,3 0,31 0 2 4 6 8 10 12 14 16 18 20 H EAV E RMS ( M) SPEED (KNOT)
HEAVE RMS, H = 1 M
Iboat 1 Iboat 2 Iboat 3
0,37 0,38 0,39 0,4 0,41 0,42 0,43 0,44 0,45 0,46 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 H EAV E RMS ( M) SPEED (KNOT)
HEAVE RMS, H = 1.5 M
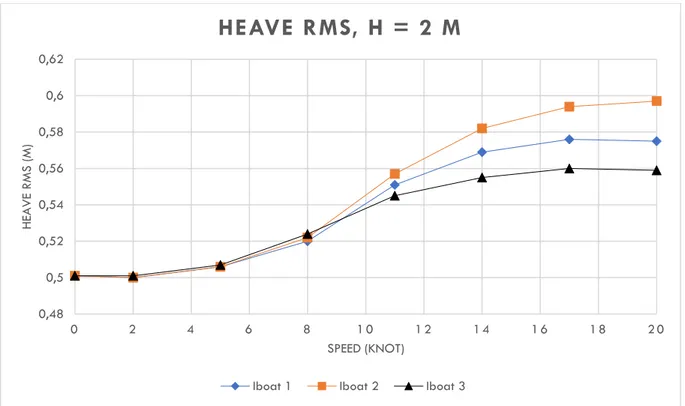
Gambar 2. 9 RMS Heave Motion Dengan Tinggi Gelombang 2 meter
Gambar 2. 6 sampai dengan Gambar 2. 9, menunjukkan RMS heave motion dari ketiga lambung kapal dalam fungsi kecepatan. Grafik menunjukkan kemiripan trend pada tiap tinggi gelombang, akan tetapi mengalami kenaikan nilai respon juga pada tiap kenaikan tinggi gelombang, hal ini terjadi karena semakin meningkat tinggi gelombang maka energi yang diberikan gelombang pada lambung kapal akan meningkat sehingga respon dari kapal juga akan mengalami peningkatan.
Tabel 2. 8 RMS Roll Motion
RMS Roll Motion (degree)
H = 0.5 m H = 1.0 m H = 1.5 m H = 2.0 m Speed (knot) Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 0 0.900 1.110 1.710 1.800 2.230 3.430 2.700 3.340 5.140 3.610 4.460 6.860 2 0.990 1.130 1.710 1.980 2.250 3.430 2.960 3.380 5.140 3.950 4.510 6.860 5 1.080 1.110 1.710 2.170 2.230 3.430 3.250 3.340 5.140 4.340 4.460 6.860 8 1.060 1.110 1.710 2.110 2.230 3.430 3.170 3.340 5.140 4.220 4.460 6.860 11 1.030 1.110 1.710 2.070 2.230 3.430 3.100 3.340 5.140 4.130 4.460 6.860 14 1.020 1.110 1.710 2.030 2.230 3.430 3.050 3.340 5.140 4.060 4.460 6.860 17 1.000 1.110 1.710 2.000 2.230 3.430 3.000 3.340 5.140 4.000 4.460 6.860 20 0.990 1.110 1.710 1.980 2.230 3.430 2.960 3.340 5.140 3.950 4.460 6.860
Tabel 2. 8 menunjukkan respon roll dari ketiga model lambung kapal pada kondisi operasi di daerah bergelombang. Dapat dilihat pada tabel bahwa respon roll kapal pada perubahan
0,48 0,5 0,52 0,54 0,56 0,58 0,6 0,62 0 2 4 6 8 1 0 1 2 1 4 1 6 1 8 2 0 H EAV E RMS ( M) SPEED (KNOT)
HEAVE RMS, H = 2 M
kecepatan operasi kapal cenderung memiliki nilai yang sama, dengan nilai respon roll terekecil dialami oleh kapal dengan model lambung 1 dan nilai respon roll terbesar dialami oleh model lambung 3.
Gambar 2. 10 RMS Roll Motion Dengan Tinggi Gelombang 0.5 meter
Gambar 2. 11 RMS Roll Motion Dengan Tinggi Gelombang 1 meter 0 1 2 3 4 5 6 7 8 0 2 4 6 8 10 12 14 16 18 20 ROL L RMS (D EG REE ) SPEED (KNOT)
ROLL RMS, H = 0.5 M
Iboat 1 Iboat 2 Iboat 3
0 1 2 3 4 5 6 7 8 0 2 4 6 8 10 12 14 16 18 20 ROL L RMS (D EG REE ) SPEED (KNOT)
ROLL RMS, H = 1 M
Gambar 2. 12 RMS Roll Motion Dengan Tinggi Gelombang 1.5 meter
Gambar 2. 13 RMS Roll Motion Dengan Tinggi Gelombang 2 meter
Gambar 2. 10 sampai dengan Gambar 2. 13, menunjukkan RMS roll motion dari ketiga lambung kapal dalam fungsi kecepatan. Dapat dilihat bahwa pada fungsi kecepatan nilai respon
0 1 2 3 4 5 6 7 8 0 2 4 6 8 10 12 14 16 18 20 ROL L RMS (D EG REE ) SPEED (KNOT)
ROLL RMS, H = 1.5 M
Iboat 1 Iboat 2 Iboat 3
0 1 2 3 4 5 6 7 8 0 2 4 6 8 10 12 14 16 18 20 ROL L RMS (D EG REE ) SPEED (KNOT)
ROLL RMS, H = 2 M
cenderung tidak mengalami perubahan, akan tetapi nilai respon roll mengalami peningkatan seiring bertambahnya tinggi gelombang, hal ini terjadi karena semakin meningkat tinggi gelombang maka energi yang diberikan gelombang pada lambung kapal akan meningkat sehingga respon dari kapal juga akan mengalami peningkatan.
Tabel 2. 9 RMS Pitch Motion
RMS Pitch Motion (degree)
H = 0.5 m H = 1.0 m H = 1.5 m H = 2.0 m Speed (knot) Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 Iboat 1 Iboat 2 Iboat 3 0 1.260 1.350 1.310 5.020 5.380 5.220 7.540 8.080 7.840 10.040 10.780 10.440 2 0.820 0.870 0.820 3.260 3.460 3.280 4.900 5.200 4.920 6.520 6.940 6.560 5 0.700 0.700 0.700 2.800 2.800 2.780 4.200 4.200 4.180 5.600 5.620 5.560 8 0.630 0.780 0.630 2.500 3.120 2.540 3.760 4.700 3.800 5.000 6.260 5.080 11 0.580 0.570 0.610 2.320 2.260 2.440 3.500 3.400 3.660 4.660 4.520 4.880 14 0.550 0.530 0.600 2.200 2.120 2.380 3.320 3.180 3.580 4.420 4.260 4.760 17 0.530 0.510 0.580 2.120 2.020 2.340 3.180 3.040 3.500 4.260 4.040 4.660 20 0.510 0.480 0.570 2.060 1.940 2.280 3.080 2.900 3.420 4.100 3.880 4.580
Tabel 2. 9 menunjukkan nilai respon pitch kapal pada daerah operasi yang bergelombang. Dapat dilihat pada tabel bahwa sudut pitch dari ketiga model pada tiap kecepatan operasi memiliki perbedaan yang kecil. Pada kecepatan operasi 20 knot respon sudut pitch terkecil yaitu pada model lambung kapal 2 dengan nilai respon sudut pitch sebesar 0.48 – 3.88 derajat pada rentang tinggi gelombang 0.5 – 2 meter. Sedangkan nilai respon sudut pitch terbesar yaitu pada model lambung kapal 3 dengan nilai respon sudut pitch sebesar 0.57 – 4.58 derajat pada rentang tinggi gelombang 0.5 – 2 meter. Dapat dilihat juga pada Gambar 2. 14 sampai dengan Gambar 2. 17 bahwa pada fungsi kecepatan, nilai respon sudut pitch akan semakin kecil seiring bertambahnya kecepatan, nilai respon pitch kapal juga bertambah besar seiring bertambahnya tinggi gelombang akibat bertambahnya pula energi yang diberikan oleh gelombambang pada kapal ketika beroperasi.
Gambar 2. 14 RMS Pitch Motion Dengan Tinggi Gelombang 0.5 meter
Gambar 2. 15 RMS Pitch Motion Dengan Tinggi Gelombang 1 meter 0 2 4 6 8 10 12 0 2 4 6 8 10 12 14 16 18 20 PI TCH R MS ( D EG REE ) SPEED (KNOT)
PITCH RMS, H = 0.5 M
Iboat 1 Iboat 2 Iboat 3
0 2 4 6 8 10 12 0 2 4 6 8 10 12 14 16 18 20 PI TCH R MS ( D EG REE ) SPEED (KNOT)
PITCH RMS, H = 1 M
Gambar 2. 16 RMS Pitch Motion Dengan Tinggi Gelombang 1.5 meter
Gambar 2. 17 RMS Pitch Motion Dengan Tinggi Gelombang 2 meter 0 2 4 6 8 10 12 0 2 4 6 8 10 12 14 16 18 20 PI TCH R MS ( D EG REE ) SPEED (KNOT)
PITCH RMS, H = 1.5 M
Iboat 1 Iboat 2 Iboat 3
0 2 4 6 8 10 12 0 2 4 6 8 10 12 14 16 18 20 PI TCH R M S (D EG REE ) SPEED (KNOT)
PITCH RMS, H = 2 M
BAB III STATUS LUARAN
Status Luaran berisi status tercapainya luaran wajib yang dijanjikan dan luaran tambahan (jika ada). Uraian status luaran harus didukung dengan bukti kemajuan ketercapaian luaran di bagian bab Lampiran
BAB IV PERAN MITRA
(UntukPenelitian Kerjasama Antar Perguruan Tinggi)BAB V KENDALA PELAKSANAAN PENELITIAN
Kendala Pelaksanaan Penelitian berisi kesulitan atau hambatan yang dihadapi selama melakukan penelitian dan mencapai luaran yang dijanjikanBAB VI RENCANA TAHAPAN SELANJUTNYA
Rencana Tahapan Selanjutnya berisi tentang rencana penyelesaian penelitian dan rencana untuk mencapai luaran yang dijanjikan.BAB VII DAFTAR PUSTAKA
Daftar Pustaka disusun dan ditulis berdasarkan sistem nomor sesuai dengan urutan pengutipan. Hanya pustaka yang disitasi pada laporan kemajuan yang dicantumkan dalam Daftar Pustaka.
BAB VIII LAMPIRAN
Lampiran berisi tabel daftar luaran (Format sesuai lampiran 1) dan bukti pendukung luaran wajib dan luaran tambahan (jika ada) sesuai dengan target capaian yang dijanjikan
LAMPIRAN 1 Tabel Daftar Luaran
Program :
Nama Ketua Tim :
Judul :
1.Artikel Jurnal
No Judul Artikel Nama Jurnal Status Kemajuan*)
*) Status kemajuan: Persiapan, submitted, under review, accepted, published 2. Artikel Konferensi
No Judul Artikel Nama Konferensi (Nama
Penyelenggara, Tempat, Tanggal)
Status Kemajuan*)
*) Status kemajuan: Persiapan, submitted, under review, accepted, presented 3. Paten
No Judul Usulan Paten Status Kemajuan
*) Status kemajuan: Persiapan, submitted, under review 4. Buku
No Judul Buku (Rencana) Penerbit Status Kemajuan*)
*) Status kemajuan: Persiapan, under review, published 5. Hasil Lain
No Nama Output Detail Output Status Kemajuan*)
*) Status kemajuan: cantumkan status kemajuan sesuai kondisi saat ini 6. Disertasi/Tesis/Tugas Akhir/PKM yang dihasilkan
No Nama Mahasiswa NRP Judul Status*)