2. TINJAUAN PUSTAKA
2.1. Persamaan SONAR
Jaya (2011) menjelaskan bahwa suara terbentuk dari gerakan molekul suatu bahan elastik. Oleh karena bahan tersebut elastik, maka gerak partikel dari bahan sumber suara akan memicu gerak partikel di dekatnya. Gerak partikel sejajar dengan arah perambatan ketika di dalam medium air. Kemudian, karena air bersifat kompresibel, gerak ini menyebabkan perubahan tekanan yang dapat dideteksi oleh hidrofon yang peka terhadap tekanan. Tekanan gelombang suara ini berhubungan dengan kecepatan partikel fluida. Gelombang suara yang merambat dalam air membawa energi mekanik dalam bentuk energi kinetik dari partikel yang sedang bergerak ditambah dengan energi potensial yang ada dalam medium elastik. Dalam perambatan gelombang suara, sejumlah energi per detik akan mengalir melewati satuan luasan tertentu yang tegak lurus dengan arah
perambatan. Jumlah energi per detik yang melintasi satuan luasan tertentu disebut sebagai intensitas gelombang. Umumnya, satuan intensitas suara dinyatakan dalam dB (desibel). Gambar 1 merupakan bidang pandang pencitraan sonar.
Urick (1983) dalam Jaya (2011) secara sederhana, sistem deteksi dan pengukuran bawah air melibatkan 3 komponen, yakni medium, target, dan peralatan. Persamaan sonar dibangun berdasarkan kesamaan atau keseimbangan antara bagian dari sinyal yang diterima, yang diinginkan (disebut sinyal) dan bagian yang tidak diinginkan (disebut derau atau noise), tergantung fungsi sonar tertentu yang diterapkan. Maksudnya, bagi operator sonar kapal selam, suara paus atau lobster merupakan derau karena suara-suara ini dapat mengacaukan sistem deteksi kapal selam sehingga tidak diinginkan. Sementara bagi peneliti, perilaku mamalia atau biota laut, seperti suara paus atau lobster adalah suara yang
diinginkan (sinyal), bukan derau. Dalam prakteknya, deteksi dan pengukuran bawah air cukup kompleks, rumit, dan bersifat probabilistik. Persamaan sonar dibentuk dari interaksi parameter-parameter sonar. Parameter sonar untuk komponen medium adalah kehilangan perambatan energi suara (transmission loss/TL), aras reverberasi (reverberation level/RL), dan aras derau latar atau lingkungan (ambient-noise level/NLa); untuk komponen target adalah kekuatan target (target strength/TS) dan aras sumber suara (target source level/SLs); dan untuk komponen peralatan adalah aras sumber yang memancarkan suara
(projector source level/SLp), aras swa-derau (self-noise level/NLs
Pada sistem sonar aktif, instrumen akustik memancarkan gelombang atau pulsa suara. Apabila mengenai target maka suara tersebut akan dipantulkan atau dihamburbalikkan dan diterima oleh instrumen akustik. Untuk kasus monostatik, di mana posisi sumber suara dan penerima suara terletak pada posisi yang sama,
), indeks
kearahan penerima (receiving directivity index/DI), dan ambang deteksi (detection threshold/DT).
gelombang suara yang berasal dari target dikembalikan tepat ke arah posisi sumber suara, persamaan sonarnya adalah
SL- 2 TL + TS = NL – DI + DT ………(1)
Sementara untuk kasus bistatik, arah perambatan gelombang suara (ke dan dari target) umumnya tidak sama. Kemudian, apabila suara latar belakang bukan derau melainkan reverberasi maka persamaan sonar perlu dimodifikasi. Suku NL – DI perlu diganti dengan aras reverberasi RL yang diamati pada penerima suara (hidrofon), sehingga persamaannya menjadi
SL – 2 TL + TS =RL + DT………(2)
Jaya (2011) juga menjelaskan instrumen akustik dilengkapi dengan transduser, piranti yang dapat mengubah energi listrik menjadi energi mekanik dan sebaliknya, sehingga dapat memancarkan dan menerima suara. Instrumen akustik berkembang seiring dengan perkembangan ilmu bahan, yang
menghasilkan transduser yang berkualitas. Selanjutnya, transduser berkas gelombang suara (single-beam) berkembang menjadi dual-beam dan akhirnya split-beam; dari frekuensi tunggal menjadi frekuensi ganda (multi-frequency). Ketajaman (sensitivitas) dapat ditingkatkan dalam deteksi transduser,
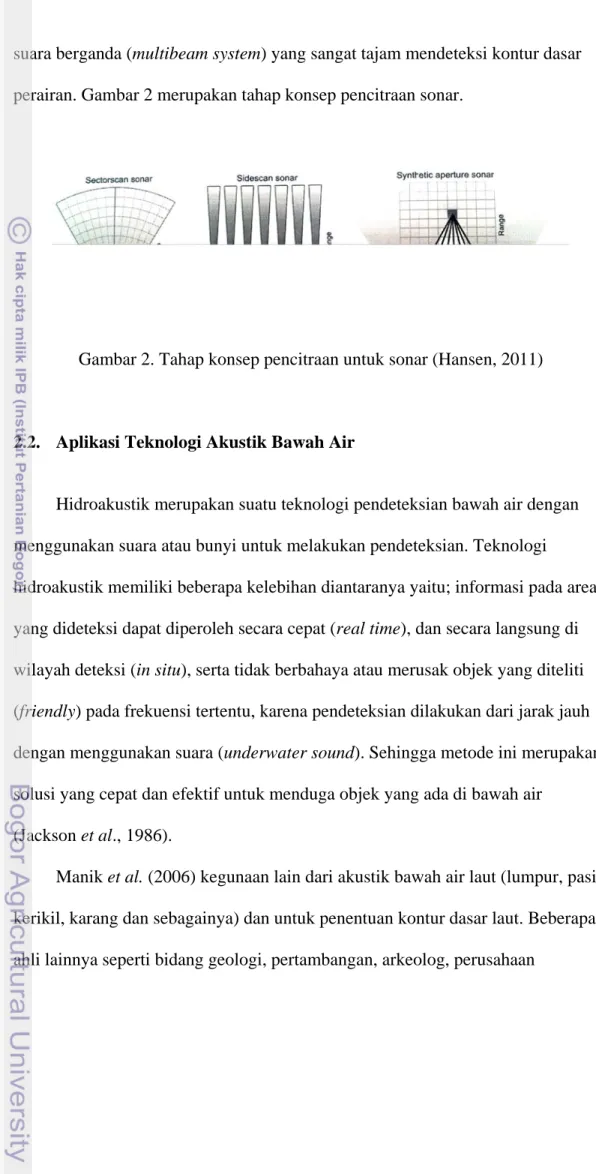
dikembangkan pula sistem untaian (array) yang merajut rangkaian transduser tunggal menjadi satu kesatuan dan kemudian diikuti dengan pengembangan teknologi pembentukan berkas gelombang (beamforming). Demikian pula dari sisi pemindaian (scanning), telah dikembangkan Side Scan Sonar. Gabungan dari frekuensi berganda dan sistem side scan ini melahirkan sistem berkas gelombang
suara berganda (multibeam system) yang sangat tajam mendeteksi kontur dasar perairan. Gambar 2 merupakan tahap konsep pencitraan sonar.
Gambar 2. Tahap konsep pencitraan untuk sonar (Hansen, 2011)
2.2. Aplikasi Teknologi Akustik Bawah Air
Hidroakustik merupakan suatu teknologi pendeteksian bawah air dengan menggunakan suara atau bunyi untuk melakukan pendeteksian. Teknologi
hidroakustik memiliki beberapa kelebihan diantaranya yaitu; informasi pada areal yang dideteksi dapat diperoleh secara cepat (real time), dan secara langsung di wilayah deteksi (in situ), serta tidak berbahaya atau merusak objek yang diteliti (friendly) pada frekuensi tertentu, karena pendeteksian dilakukan dari jarak jauh dengan menggunakan suara (underwater sound). Sehingga metode ini merupakan solusi yang cepat dan efektif untuk menduga objek yang ada di bawah air
(Jackson et al., 1986).
Manik et al. (2006) kegunaan lain dari akustik bawah air laut (lumpur, pasir, kerikil, karang dan sebagainya) dan untuk penentuan kontur dasar laut. Beberapa ahli lainnya seperti bidang geologi, pertambangan, arkeolog, perusahaan
konstruksi dan badan pengawasan lingkungan turut memanfaatkan bidang ilmu akustik dasar laut.
a. Pengukuran Kedalaman Dasar Laut (Bathymetry)
Pengukuran kedalaman dasar laut dapat dilakukan dengan Conventional Depth Echo Sounder, di mana kedalaman dasar laut dapat dihitung dari perbedaan waktu antara pengiriman dan penerimaan pulsa suara. Pertimbangan sistim Side-Scan Sonar pada saat ini, pengukuran kedalaman dasar laut (bathymetry) dapat dilaksanakan bersama-sama dengan pemetaan dasar laut (Sea Bed Mapping) dan pengidentifikasian jenis-jenis lapisan sedimen di bawah dasar laut (subbottom profilers).
b. Pengidentifikasian Jenis-jenis Lapisan Sedimen Dasar Laut (Subbottom Profilers)
Teknologi akustik bawah air, dengan peralatan side-scan sonar yang
mutakhir dilengkapi dengan subbottom profilers dan menggunakan frekuensi yang lebih rendah dan sinyal impulsif yang bertenaga tinggi yang digunakan untuk penetrasi ke dalam lapisan-lapisan sedimen di bawah dasar laut.
c. Pemetaan Dasar Laut (Sea bed Mapping)
Teknologi side-scan sonar dalam pemetaan dasar laut dapat menghasilkan tampilan peta dasar laut dalam tiga dimensi. Peta dasar laut yang lengkap dan rinci ini dapat digunakan untuk menunjang penginterpretasian struktur geologi bawah dasar laut dan kemudian dapat digunakan untuk mencari mineral bawah dasar laut.
d. Pencarian Kapal-kapal Karam di Dasar Laut
2.3. Prinsip Kerja Multibeam Sonar
Simmonds dan MacLennan (2005) menjelaskan ada dua jenis dari sonar yaitu pasif dan aktif. Aktif sonar mentransmisikan sinyal akustik dan mendeteksi pantulan dari objek di dalam air. Pasif sonar tidak mentransmisikan sinyal akustik, tetapi hanya mendeteksi sumber suara yang berasal dari objek yang diamati. Pada penelitian ini hanya dibahas mengenai metode sonar aktif saja.
Multibeam sonar merupakan instrumen hidroakustik yang menggunakan prinsip yang sama dengan single beam namun perbedaannya terletak pada jumlah beam yang dipancarkannya lebih dari satu dalam satu kali pancar. Berbeda dengan Side Scan Sonar pola pancaran yang dimiliki multibeam sonar melebar dan
melintang terhadap badan kapal. Setiap beam memancarkan satu pulsa suara dan memiliki penerimanya masing-masing. Saat kapal bergerak hasil sapuan
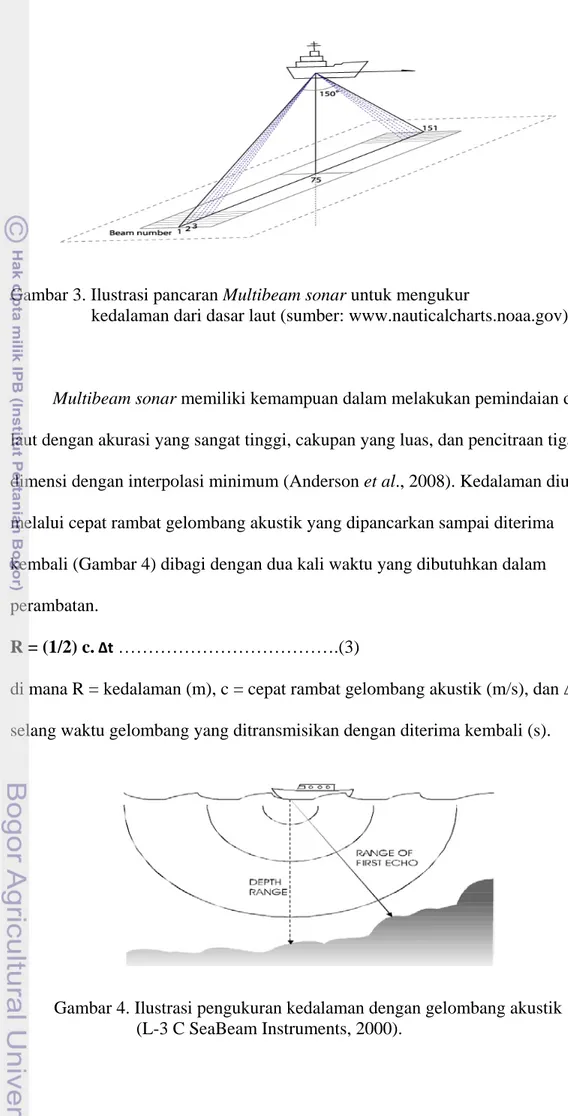
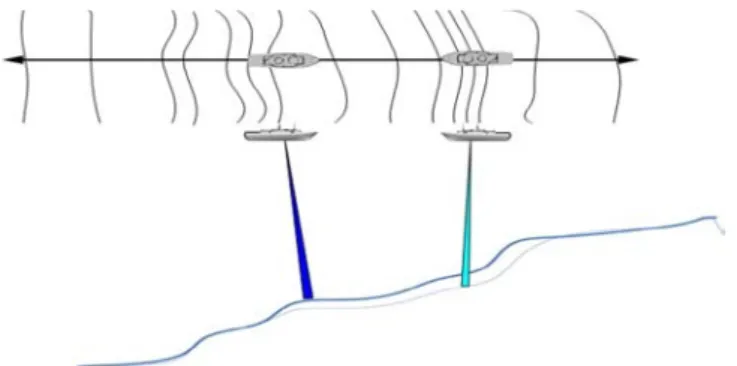
multibeam tersebut menghasilkan suatu luasan area permukaan dasar laut (Moustier, 2005 dalam Gumbira, 2011). Transduser yang terdapat di dalam multibeam sonar terdiri dari serangkaian elemen yang memancarkan pulsa suara dalam sudut yang berbeda. Biasanya hanya satu beam yang ditransmisikan tetapi menghasilkan banyak pantulan energi dari masing-masing pulsa suara yang ditransmisikan. Kemampuan setiap elemen transduser menerima kembali pulsa suara yang dipantulkan tergantung kepada metode kalibrasi terhadap gerak kapal yang diterapkan (Hammerstad, 2000). Gambar 3 merupakan ilustrasi pancaran Multibeam sonar.
Gambar 3. Ilustrasi pancaran Multibeam sonar untuk mengukur
kedalaman dari dasar laut (sumber: www.nauticalcharts.noaa.gov).
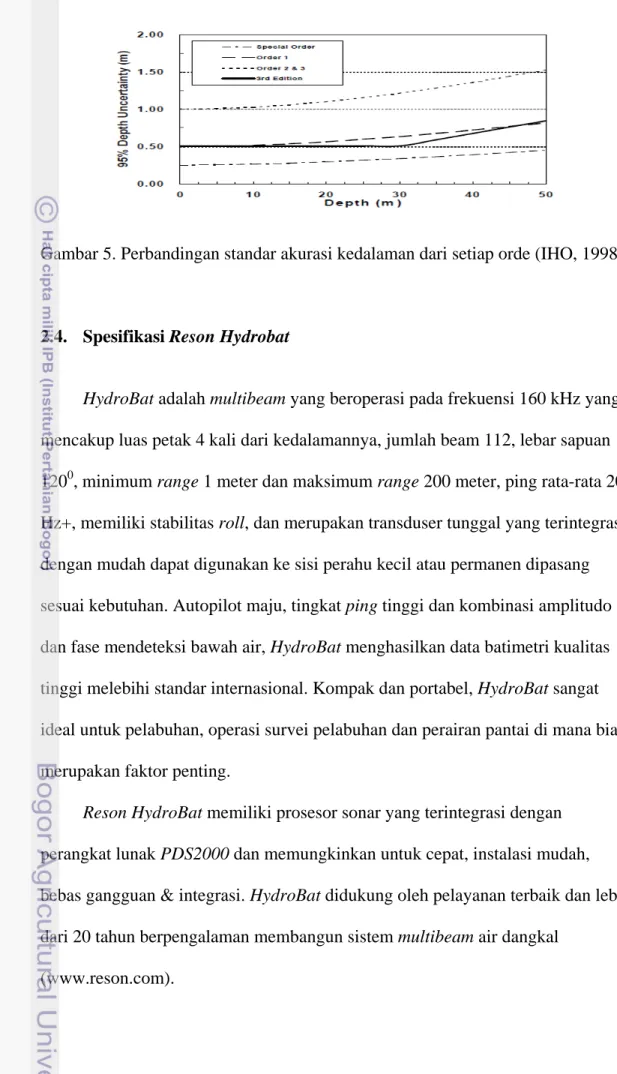
Multibeam sonar memiliki kemampuan dalam melakukan pemindaian dasar laut dengan akurasi yang sangat tinggi, cakupan yang luas, dan pencitraan tiga dimensi dengan interpolasi minimum (Anderson et al., 2008). Kedalaman diukur melalui cepat rambat gelombang akustik yang dipancarkan sampai diterima kembali (Gambar 4) dibagi dengan dua kali waktu yang dibutuhkan dalam perambatan.
R = (1/2) c. ∆t ……….(3)
di mana R = kedalaman (m), c = cepat rambat gelombang akustik (m/s), dan ∆t = selang waktu gelombang yang ditransmisikan dengan diterima kembali (s).
Gambar 4. Ilustrasi pengukuran kedalaman dengan gelombang akustik (L-3 C SeaBeam Instruments, 2000).
Kedalaman hasil pengukuran yang didapatkan selanjutnya dilakukan koreksi dari berbagai kesalahan yang mungkin terjadi. Kesalahan tersebut dapat berasal dari kecepatan gelombang suara, pasang surut, kecepatan kapal, sistem
pengukuran, offset dan posisi kapal, dan sinkronisasi waktu (diperlukan karena jenis peralatan yang banyak dan berbeda dan harus terintegrasi dalam satu satuan waktu), sedangkan sumber kesalahan saat pengolahan data (sesudah survei) adalah kecepatan gelombang suara, pasang surut, dan offset dan posisi kapal (PPDKK Bakosurtanal, 2010).
Berdasarkan S-44 11 International Hydrographyc Organisation (IHO) yang membagi wilayah perairan menjadi 4 orde (klasifikasi perairan suvei berdasarkan kedalaman), yaitu orde khusus, orde 1, orde 2, dan orde 3. Pada penelitian ini hanya dibahas orde 1 dikarenakan wilayah penelitian masuk pada orde 1 yaitu perairan yang memiliki kedalaman kurang dari 100 meter, yang diperuntukkan bagi pelabuhan-pelabuhan, alur pendekat, haluan yang dianjurkan, alur navigasi, dan daerah pantai dengan lalu lintas komersial yang padat, di mana kedalaman di bawah lunas kapal cukup memadai dan kondisi fisik dasar yang tidak begitu membahayakan (misalnya lumpur atau pasir). Batas toleransi kesalahan ketelitian kedalaman (σ) pada orde pertama dihitung dengan menggunakan persamaan 4.
σ = + √{a
2+ (b x d )
2}
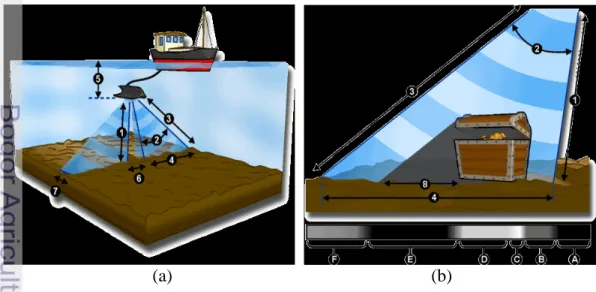
………(4)Keterangan : Konstanta orde 1 adalah a = 0.5 meter dan b = 0.013 dengan σ : ketelitian kedalaman, a : konstanta kesalahan kedalaman yaitu jumlah dari semua konstanta kesalahan, b : faktor pengganti kesalahan kedalaman lain, d : kedalaman (meter), bxd : kesalahan kedalaman lain, jumlah semua kesalahan. Gambar 5 merupakan standar akurasi kedalaman dari setiap orde.
Gambar 5. Perbandingan standar akurasi kedalaman dari setiap orde (IHO, 1998)
2.4. Spesifikasi Reson Hydrobat
HydroBat adalah multibeam yang beroperasi pada frekuensi 160 kHz yang mencakup luas petak 4 kali dari kedalamannya, jumlah beam 112, lebar sapuan 1200
Reson HydroBat memiliki prosesor sonar yang terintegrasi dengan perangkat lunak PDS2000 dan memungkinkan untuk cepat, instalasi mudah, bebas gangguan & integrasi. HydroBat didukung oleh pelayanan terbaik dan lebih dari 20 tahun berpengalaman membangun sistem multibeam air dangkal
(
, minimum range 1 meter dan maksimum range 200 meter, ping rata-rata 20 Hz+, memiliki stabilitas roll, dan merupakan transduser tunggal yang terintegrasi dengan mudah dapat digunakan ke sisi perahu kecil atau permanen dipasang sesuai kebutuhan. Autopilot maju, tingkat ping tinggi dan kombinasi amplitudo dan fase mendeteksi bawah air, HydroBat menghasilkan data batimetri kualitas tinggi melebihi standar internasional. Kompak dan portabel, HydroBat sangat ideal untuk pelabuhan, operasi survei pelabuhan dan perairan pantai di mana biaya merupakan faktor penting.
2.5. Prinsip Kerja Side Scan Sonar
Side Scan Sonar (SSS) mempunyai kemampuan menduplikasikan beam yang diarahkan pada satu sisi ke sisi lainnya, sehingga kita dapat melihat kedua sisi, memetakan semua area penelitian secara efektif dan menghemat waktu penelitian. SSS menggunakan narrow beam pada bidang horisontal untuk mendapatkan resolusi tinggi di sepanjang lintasan dasar laut (Klein Associates Inc, 2003). Instrumen ini mampu membedakan besar kecil partikel penyusun permukaan dasar laut seperti batuan, lumpur, pasir, kerikil, atau tipe-tipe dasar perairan lainnya (Bartholoma, 2006).
SSS menggunakan prinsip backscatter akustik dalam mengindikasikan atau membedakan kenampakan bentuk dasar laut atau objek di dasar laut. Material seperti besi, bongkahan, kerikil, atau batuan vulkanik sangat efisien dalam merefleksikan pulsa akustik (backscatter kuat). Sedimen halus seperti tanah liat, lumpur, tidak merefleksikan pulsa suara dengan baik (lemah). Reflektor kuat akan menghasilkan pantulan backscatter yang kuat sedangkan reflektor lemah
menghasilkan backscatter yang lemah. Dengan menggunakan karakter ini, pengguna SSS dapat menguji komposisi dasar laut atau objek dengan mengamati pengembalian kekuatan akustik (Tritech International Limited, 2008).
Side Scan Sonar (SSS) dapat dipasang pada lunas kapal atau ditarik di belakang kapal. Ilustrasi pemasangan SSS menggunakan towed body dapat dilihat pada Gambar 6 (a). Pada gambar tersebut terlihat bahwa SSS mentransmisikan pulsa akustik secara menyamping terhadap arah perambatan. Dasar laut dan objek merefleksikan kembali (backscatter) gelombang suara pada sistem sonar.
dalam bentuk citra dua dimensi. Oleh karena itu, SSS tidak hanya menampilkan objek, melainkan juga bayangan objek tersebut. Pembentukan objek bayangan SSS diilustrasikan pada Gambar 6 (b).
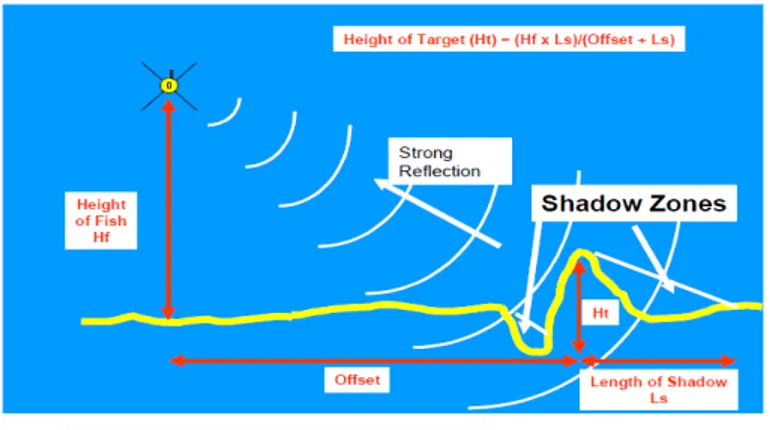
Keterangan pada Gambar 6 adalah (1) nilai kedalaman dari lintasan akustik, (2) sudut beam vertikal, (3) jarak akustik maksimum, (4) lebar sapuan lintasan dasar laut, (5) jarak SSS dengan permukaan air, (6) jarak pemisah antara port channel dan starboard channel, (7) lebar beam horisontal, (8) panjang bayangan akustik yang disesuaikan dengan tinggi target, (A) area sebelum pengambilan first bottom (pada daerah ini tidak ada suara yang dihamburkan dan ditandai dengan warna hitam), (B) dan (F) tekstur dasar laut, (C) sudut objek yang bersifat sangat memantulkan dengan intensitas yang paling terang, (D) objek yang memantulkan, dan (E) bayangan dari target akustik (tidak ada pantulan disini). Gambar 7
merupakan geometri tinggi target dari side scan sonar, di mana Hf : tinggi towfish dari dasar perairan, Ht : tinggi target, Ls : panjang bayangan dari target, dan offset : jarak horisontal target dasar laut dengan titik di bawah towfish.
(a) (b)
Gambar 6. Ilustrasi (a) pendektesian objek oleh SSS, (b) pembentukan objek dan bayangan pada SSS (Tritech International Limited, 2008).
Gambar 7. Geometri tinggi target dari side scan sonar (EM, 2002).
2.6. Spesifikasi SSS Edge 4200
Edgetech 4200 adalah side scan sonar yang serba guna, sistem sonar yang
dapat dikonfigurasi untuk hampir semua aplikasi survei dari dangkal hingga operasi perairan dalam dengan jangkauan operasi 100 kHz; 500 m, 300 kHz; 230 m, 400 kHz; 150 m, 600 kHz; 120 m, 900 kHz; 75 m. Instrumen ini menghasilkan citra resolusi tinggi dan dapat dioperasikan pada maksimum kedalaman 2000 meter, sehingga menghemat biaya yang dihabiskan untuk survei yang relatif mahal.
Salah satu fitur unik dari 4200 adalah teknologi opsional Multi-Pulse (MP), yang menempatkan dua pulsa suara di dalam air bukan satu pulsa seperti sistem side scan sonar konvensional dan memiliki sensor standar heading, pitch dan roll. Hal ini memungkinkan Edgetech 4200 dapat dipakai dengan kecepatan hingga 10 knot dengan tetap mempertahankan cakupan 100% di bawahnya. Selain itu, teknologi MP akan memberikan dua kali resolusi ketika beroperasi pada
kecepatan derek normal, sehingga memungkinkan untuk deteksi target yang lebih baik dan kemampuan klasifikasi (www.edgetech.com).
2.7. Kalibrasi Data
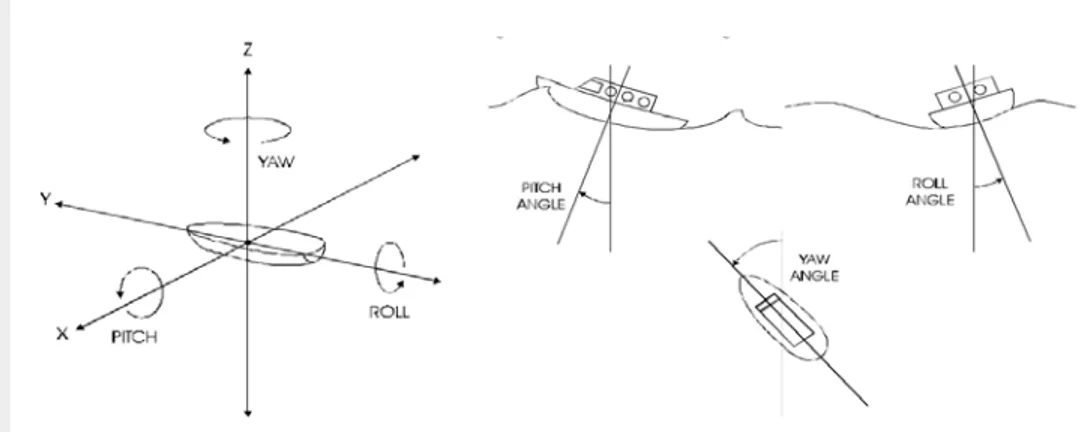
Kalibrasi merupakan tahapan yang dilakukan untuk memeriksa dan menentukan besarnya kesalahan yang ada dalam instrumen yang bersangkutan. Kalibrasi diperlukan untuk menentukan kualitas data yang digunakan. Kalibrasi biasanya berkaitan dengan offset kapal dan gerakan kapal ( roll, pitch, dan yaw) ( Gambar 8 ).
Gambar 8. Rotasi dan sudut dari gerakan kapal roll, pitch, dan yaw (L-3 C SeaBeam Instruments, 2000)
Metode penyelesaiannya tergantung pada masing-masing software saat proses pengumpulan data (Sounding). Umumnya kalibrasi waktu tunggu (latency) akan ditentukan terlebih dahulu sebelum kalibrasi pitch dan kalibrasi roll ditentukan sebelum yaw (Brennan, 2009).
2.7.1. Kalibrasi Waktu tunggu (time delay/latency)
Pengambilan data pemeruman yang dilakukan Multibeam sonar (MBS) memiliki perbedaan waktu dengan Differential Global Positioning Systems (DGPS) atau sistem penentuan posisi kapal menggunakan GPS. Perbedaan
tersebut disebabkan adanya pengaruh kolom perairan terhadap gelombang suara yang diterima kembali sehingga waktu yang diterima multibeam cenderung lebih lambat. Perbedaan ini menyebabkan adanya keterlambatan pada DGPS. Kalibrasi waktu tunggu atau yang lebih dikenal sebagai kalibrasi time delay digunakan untuk melakukan koreksi terhadap keterlambatan DGPS. Time delay umumnya bernilai antara 0,2 - 1 detik dan kondisi ini menyebabkan kesalahan pada posisi yang dipengaruhi oleh kecepatan kapal. Time delay dikatakan akurat apabila dapat dideteksi hingga 10 - 50 ms (Gambar 9).
Gambar 9. Pengumpulan data time delay/latency (Brennan, 2009)
Persamaan yang digunakan untuk menghitung kalibrasi waktu tunggu (time delay) adalah : Td = da/(vh- vl)……….(5)
Keterangan : Td= Time delay (s), da
2.7.2. Kalibrasi Roll
= jarak sepanjang perpindahan (ft), Vh =
kecepatan kapal tertinggi (ft/sec), Vl = kecepatan kapal terendah (ft/sec).
Kalibrasi ini digunakan untuk mengoreksi gerakan oleng kapal pada arah sumbu x. Kalibrasi terhadap gerakan roll (Gambar 10) sangat diperlukan karena
pengaruhnya yang sangat besar pada wilayah laut dalam. Untuk melakukan kalibrasi roll, harus memenuhi beberapa persyaratan, yaitu kapal melintasi jalur yang sama dengan arah yang berlawanan, melintasi dasar laut dengan relief datar. Sudut kecil (<30) roll offset dapat dihitung dengan persamaan berikut:
r = tan-1[(dz/ da)/2]……….(6)
Keterangan: r = roll offset (deg), dz =perbedaan kedalaman (ft), da =
across-track distance / jarak lintasan (ft)
Gambar 10. Pengumpulan data Roll (Brennan, 2009)
2.7.3. Kalibrasi Pitch
Kalibrasi yang dilakukan karena gerakan kapal naik turun (Gambar 11). Kalibrasi ini ditentukan dari dua pasang garis (line survey) kapal yang melintasi jalur sama dengan arah yang berlawanan, melintasi dasar laut dengan relief yang curam (over slope) pada dua kecepatan yang berbeda. Pitch offset dapat diukur dengan persamaan berikut:
a = tan-1[(da/2)/ (D)]………..(7)
di mana : a= pitch offset (degree), da = across-track distance atau jarak lintasan
Gambar 11. Pengumpulan data pitch (Brennan, 2009)
2.7.4. Kalibrasi Yaw (Azimuthal)
Kalibrasi ini digunakan untuk mengoreksi gerakan memutar kapal pada sumbu z atau gerakan ke kiri dan kanan kapal pada sumbu z (Azimuthal) (Gambar 12). Kesalahan gerakan yaw akan menghasilkan kesalahan dalam posisi
kedalaman, yang mana semakin besar dengan jauh dari nadir. Kalibrasi dapat ditentukan dengan persamaan berikut:
y = sin-1[(da/2)/ XI]………. (8)
di mana : y = azimuthal offset (deg), da = jarak pergantian sepanjang lintasan /
along-track displacement (ft), XI= jarak relatif lintasan ke beam i (ft).
2.8. Kecepatan gelombang suara (Sound Velocity)
Gelombang suara merambat baik dalam air. Dalam air laut yang bersifat konduktif dan keruh, kebanyakan gelombang elektro magnetik (gelombang cahaya dan radio) akan berkurang energinya (teratenuasi) dengan cepat dalam jarak beberapa ratus bahkan puluh meter saja. Penetrasi cahaya praktis hanya dapat mencapai beberapa puluh meter di bawah lapisan permukaan, sementara gelombang suara dapat mencapai dasar laut dengan kedalaman ribuan meter dan dapat merambat puluhan ribu meter melintasi samudra luas (Jaya, 2011).
Kecepatan suara merupakan faktor yang sangat penting dalam survei batimetri. Hal ini disebabkan kecepatan suara dalam air memiliki nilai yang tidak selalu sama untuk setiap wilayah, sehingga langkah awal untuk melakukan pemetaan dasar laut (Marine mapping) adalah melakukan perhitungan terhadap kecepatan suara di wilayah tersebut. Pengambilan data kecepatan suara dapat dilakukan menggunakan Conductivity Temperature and Depth (CTD) ataupun Sound Velocity Profiler (SVP).
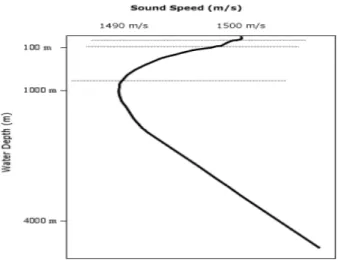
Mike (2008) menjelaskan laut memiliki tiga zona utama kecepatan suara (Gambar 13) yaitu:
• Permukaan / Musiman: Merupakan bagian yang sangat bervariasi dengan permukaan berkisar 0 sampai 100 meter dan musiman berkisar 100 sampai 200 m • Termoklin utama (Main thermocline): Pada bagian ini cenderung mengalami penurunan SV sampai 1000 meter karena terutama terjadi penurunan suhu. • Lapisan kedalaman isotermal (Deep isothermal layer): Berada di bawah 1000 meter. Suhu air mendekati 2 0C dan kecepatan suara meningkat hanya karena tekanan.
Gambar 13. Profil kecepatan suara dalam air laut (Mike, 2008)
Kecepatan suara adalah fungsi dari suhu, salinitas dan tekanan (kedalaman). • Suhu sangat bervariasi dari permukaan sampai akhir termoklin utama.
• Salinitas diukur dalam Practical Salinity Units (PSU). 1 PSU = sekitar 1 bagian per seribu (ppt). Salinitas berubahan dari 34 dekat permukaan sampai 35 dekat dasar (Bottom).
• Tekanan khas diukur dalam decibars, satu decibars tekanan meningkat sesuai dengan 1 meter air mendalam.
Tingkat kecepatan suara meningkat seiring dengan peningkatan suhu, salinitas, dan tekanan: Peningkatan suhu 1 0
c = 1449 + 4.6T – 0.055T
C akan menaikkan kecepatan suara 4,0 m / detik, peningkatan salinitas 1 PSU akan menaikkan kecepatan suara 1,4 m / detik, dan peningkatan tekanan atau kedalaman 1 km akan menambah pula kecepatan suara sebesar 17 meter/detik. Secara sederhana dapat ditentukan nilai kecepatan suara ( c ) dengan formula dari Wilson atau Persamaan 9:
2
+ 0.0003T3 + (1.39 – 0.012T) (S – 35) + 0.017
di mana : c = kecepatan suara (m/s), T= suhu (0
2.9. Koreksi Data SSS
C), S= salinitas (PSU), dan Z = kedalaman / tekanan (dbars).
Dalam menentukan posisi suatu objek yang sudah teridentifikasi di dasar laut yang berupa material jatuhan logam, beton, dan pecahan karang kita harus melakukan koreksi terlebih dahulu, karena posisi objek terdapat di belakang kapal dan juga di bagian kanan atau kiri towfish. Dalam hal ini untuk ketelitian posisi suatu objek tergantung dari skala peta yang diinginkan. Koreksi dalam
menentukan posisi objek terbagi dua yaitu slant range corection dan layback correction (Laswono, 2007 dalam Sari dan Manik, 2009).
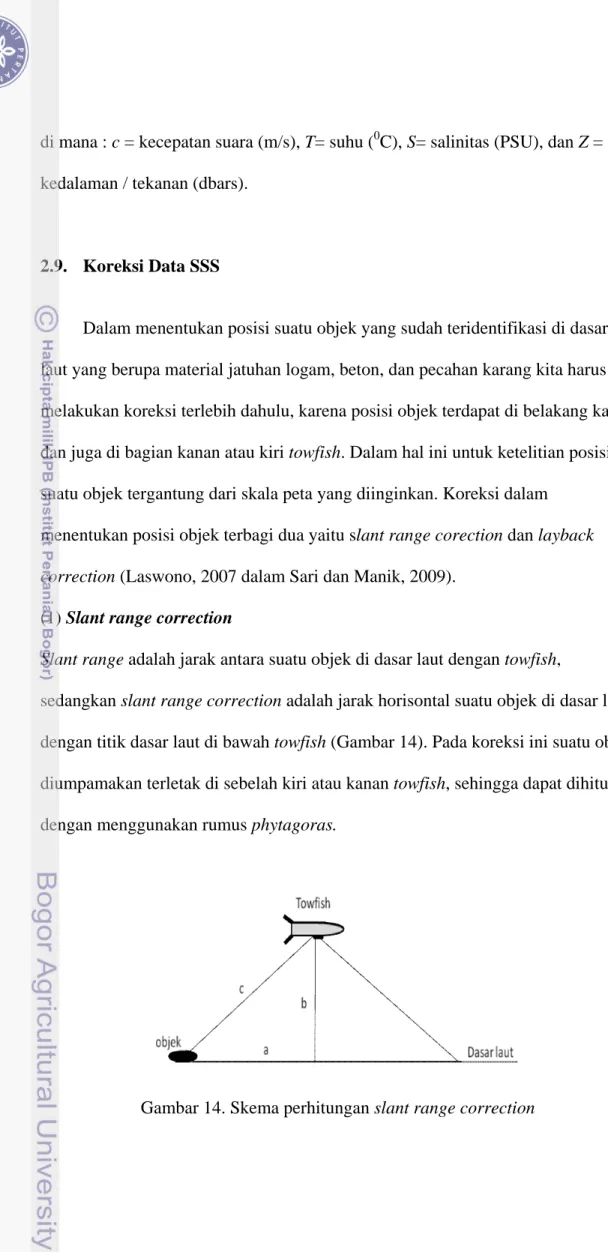
(1) Slant range correction
Slant range adalah jarak antara suatu objek di dasar laut dengan towfish,
sedangkan slant range correction adalah jarak horisontal suatu objek di dasar laut dengan titik dasar laut di bawah towfish (Gambar 14). Pada koreksi ini suatu objek diumpamakan terletak di sebelah kiri atau kanan towfish, sehingga dapat dihitung dengan menggunakan rumus phytagoras.
di mana: a = Slant range correction, b = Tinggi towfish terhadap dasar laut, c = Slant
range.
(2) Layback Correction
Layback correction adalah jarak mendatar dari antena GPS terhadap posisi towfish di belakang kapal. Tujuan penghitungan ini adalah untuk menentukan posisi towfish sebenarnya. Perhitungan layback correction (Gambar 15) juga dihitung dengan menggunakan rumus phytagoras sebagai berikut:
Gambar 15. Skema perhitungan layback correction
Keterangan: a2 = c2 – b2, D = kedalaman laut, a = Jarak mendatar dari buritan kapal ke towfish, b = Kedalaman towfish dari permukaan laut, c = Panjang towcable, d = Tinggi towfish dari dasar laut, e = Jarak horisontal dari antena GPS ke buritan kapal.
Jika jarak horisontal dari antena sampai buritan diketahui, maka koreksi jarak horisontal dari antena sampai towfish dapat dicari, yaitu dengan cara
menambahkan jarak horisontal dari buritan ke towfish dengan jarak antena dengan buritan.
2.10. Sensor CodaOctopus F 180
Koreksi terhadap pengaruh roll, pitch, heave dan heading dilakukan secara real time menggunakan sensor attitude and positioning systems CodaOctopus F 180. Sensor ini memiliki ketelitian mencapai 1 cm dengan menggunakan Real Time Kinematic (RTK), Differential Global Positioning Systems (DGPS) 0.4 m, kecepatan 0.03 m/s dan kemampuan adaptasi terhadap suhu pada rentang -10 0C sampai 60 0C. CodaOctopus F 180 memiliki remote Inertial Measurement Unit (IMU) yang dapat diikatkan di kepala transduser multibeam. Keunggulan sensor ini, yaitu memiliki perangkat lunak untuk pemrosesan model posisi dan data yang mudah digunakan (www.codaoctopus.com).
2.11. Interpolasi Circular dan Matrix
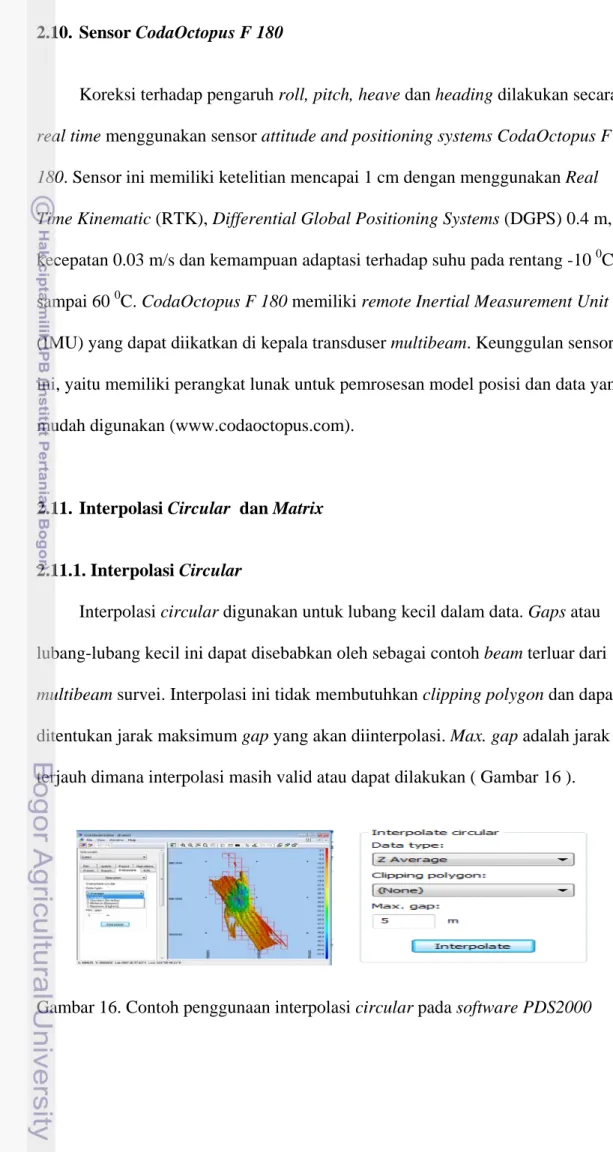
2.11.1. Interpolasi Circular
Interpolasi circular digunakan untuk lubang kecil dalam data. Gaps atau lubang-lubang kecil ini dapat disebabkan oleh sebagai contoh beam terluar dari multibeam survei. Interpolasi ini tidak membutuhkan clipping polygon dan dapat ditentukan jarak maksimum gap yang akan diinterpolasi. Max. gap adalah jarak terjauh dimana interpolasi masih valid atau dapat dilakukan ( Gambar 16 ).
Tergantung pada ukuran area interpolasi dan kekuatan dari komputer, interpolasi ini dapat dikerjakan dalam waktu yang singkat atau lama. Cara terbaik untuk menggunakan petunjuk ini adalah ketika ada gap atau lubang kecil dan dalam jumlah yang banyak seperti dalam data multibeam (PDS 2000, 2011).
2.11.2. Interpolasi Matrix
Interpolasi ini digunakan untuk lubang-lubang kecil (small holes) yang nampak di area data dimana resolusi permukaan terlalu kecil untuk menyediakan cakupan (coverage) yang akurat. Hal ini terkadang terjadi di beam yang terluar sepanjang ujung terluar dari area survei dimana hanya ada sedikit atau tidak ada cakupan yang menutupinya (no overlapping coverage). Interpolasi matrix ini hanya berukuran 3x3 dan 5x5 pixel dalam menginterpolasi bagian yang kosong dari permukaan dasar (Gambar 17). Hal ini karena mencegah terjadinya perluasan (expanding) dari permukaan luar area survei (Caris, 2007).
Gambar 17. Contoh penggunaan interpolasi Base surface (Caris, 2007)
2.12. Kondisi Umum Lokasi Penelitian
Sungai Mahakam terletak di daerah Samarinda Kalimantan timur . Sungai Mahakam terletak pada garis lintang 00 35’0”S dan 117 0 17’0”E dan panjang
Node yang tdk ada nilai pixel-nya
sungai ini mencapai 920 km dengan luasnya 149.227 km2 serta memiliki lebar antara 300-500 meter. Sungai ini melewati wilayah kabupaten Kutai Barat bagian hulu hingga kabupaten Kutai Kertanegara dan Samarinda di bagian hilirnya. Sungai Mahakam adalah sungai utama yang membelah Kota Samarinda, sungai-sungai lainnya adalah anak-anak sungai-sungai yang bermuara di sungai-sungai Mahakam (Watiningsih, 2009).
Jembatan Kutai Kartanegara adalah jembatan yang melintas di atas sungai Mahakam. Panjang jembatan secara keseluruhan mencapai 710 meter, dengan bentang bebas atau area yang tergantung tanpa penyangga mencapai 270 meter. Jembatan ini merupakan sarana penghubung antara kota Tenggarong dengan Kecamatan Tenggarong Seberang yang menuju ke Kota Samarinda (Gambar 18). Jembatan ini dibangun menyerupai Jembatan Golden Gate di San Fransisco, Amerika Serikat. Pembangunan jembatan ini dimulai pada tahun 1995 dan selesai pada 2001 dengan kontraktor PT Hutama Karya yang menangani proyek
pembangunan jembatan tersebut. Namun pada tanggal 26 November 2011 pukul 16.20 waktu setempat, Jembatan Kutai Kartanegara ambruk dan rubuh
(www.harianhaluan.com).
Gambar 18. Dimensi jembatan Kartanegara, Kalimantan Timur (Kementerian PU, 2001).
Sesuai Buku "Konstruksi Indonesia" Terbitan (Depkimpraswil) Kementerian PU, Tahun 2003 (Luknanto, 2012) diperoleh informasi sebagai berikut:
Nama Lain : Jembatan Kertanegara - 1
Tipe Bangunan Atas : Jembatan Gantung Rangka Baja. Panjang Bentang Total : 710 M
Panjang Bentang Utama : 470 M
Fabrikasi Rangka Baja : PT. Bukaka Teknik Utama
Kabel Penggantung : dari Canada (tidak disebutkan nama produsen/pabrikan).
Perlindungan Keawetan Kabel : Zinc Galvanized Coated. Bangunan bawah : Pondasi Tiang Pancang Baja. Tinggi Bebas/Vertical Clearence : 45 M.
Ruang Bebas Horizontal : 270 M
Tinggi Tower : 37 M
Berat Tower : 292 Ton.
Metode Konstruksi : Heavy Lifting
Disain : Direktorat Jenderal Bina Marga
Kontraktor : PT Hutama Karya (Persero)
Pengawas : PT. Perentjana Djaja
Lama Konstruksi : 5 Tahun