ROBOT BECAK BERBASIS MIKROKONTROLER ATMEGA 8535 DENGAN LOGIKA FUZZY.
Teks penuh
Gambar


Dokumen terkait
laporan akhir yang berjudul “APLIKASI SENSOR TPA81 SEBAGAI ALAT PENDETEKSI API PADA ROBOT PEMADAM API BERBASISKAN MIKROKONTROLER ATMEGA 8535 ”. Laporanakhir ini
Motor DC (FAN) merupakan keluaran atau output yang digunakan dalam alat Kontrol Pendingin Ruangan (FAN) dengan logika fuzzy menggunakan ATmega 8535, LM 35 Dan PIR ini,
Dalam penelitian ini dibuatlah teknologi otomatisasi menggunakan logika fuzzy berbasis mikrokontroler, untuk sistem pendeteksi kondisi air dan ketinggian air serta sistem untuk
Implementasi Robot Pembersi Lantai Dengan Pengendali Smartphone.. Menggunakan
Pada tahun 2017 telah dilakukan sebuah penelitian oleh Firadus et.al yaitu perancangan robot pemotong rumput otomatis dengan menggunakan logika Fuzzy metode mamdani
Dari hasil pengujian diperoleh bahwa kendali logika fuzzy yang diaplikasikan pada robot IPBD dapat menjaga keseimbangan robot dengan osilasi pada sudut -2 hingga 2
Adapun manfaat yang dapat diambil dari pembuatan robot becak berbasis GPS menggunakan mikrokontroller Atmega8535 ini adalah :. Digunakan sebagai bahan media pembelajaran di
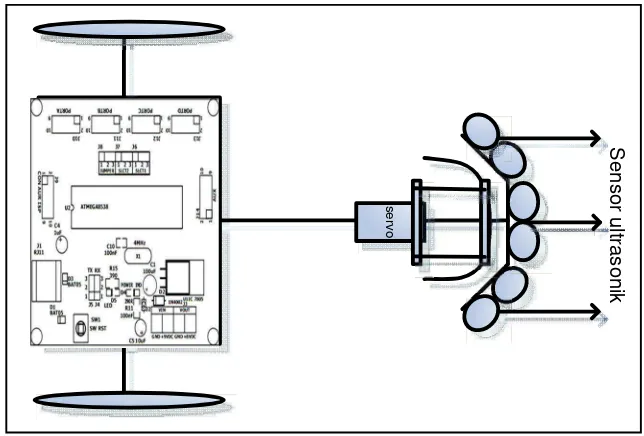
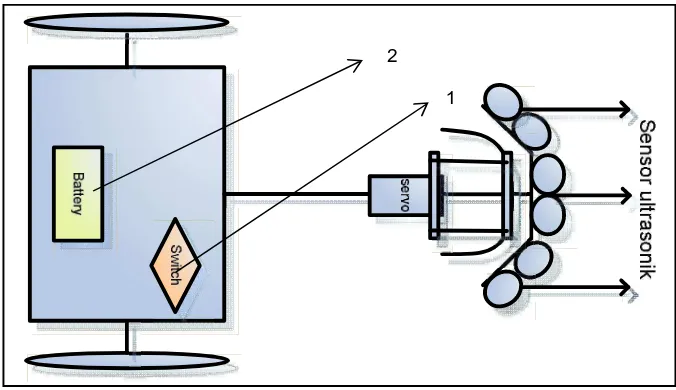
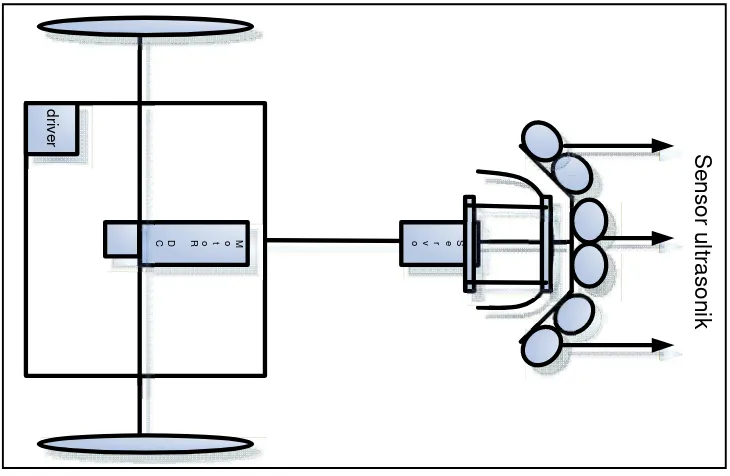
Sistem pengatur kecepatan pada robot mobile ini menggunakan mikrokontroler ATMega 328 sebagai kontroler, modul sensor ultrasonik HC- SR04 sebagai pendeteksi jarak,
