1
PETA KENDALI R ADAPTIF SEBAGAI ALTERNATIF PETA KENDALI R
SHEWHART DALAM MENDETEKSI PERGESERAN KECIL PADA
VARIANS
Oleh : Farihatul Usro1207 100 703 Dosen Pembimbing : Dra. Farida Agustini W. MS
Dra. Laksmi Prita W. MSi Jurusan Matematika
Fakultas Matematika dan Ilmu Pengetahuan Alam Institut Teknologi Sepuluh Nopember
Surabaya 2011 Abstrak
Kualitas merupakan hal yang sangat dipertimbangkan oleh konsumen dalam memilih produk. Kualitas yang baik berasal dari suatu proses yang terkendali. Salah satu alat yang digunakan untuk mengendalikan kualitas pada proses produksi adalah peta kendali. Umumnya peta kendali yang dipakai untuk memantau varians proses untuk data kuantitatif adalah peta kendali R Shewhart, yang terbukti berfungsi dengan baik untuk mendeteksi peningkatan yang besar pada varians, namun kurang cepat dalam mendeteksi peningkatan varians yang kecil. Sifat yang bisa divariasi pada peta kendali adaptif yaitu ukuran sampel, interval pengambilan sampel dan koefisien batas kendali. Dalam tugas akhir ini dianalisis peta kendali R adaptif yang menggunakan ukuran sampel dan interval pengambilan sampel bervariasi, kemudian dibandingkan kinerjanya terhadap peta kendali R Shewhart berdasarkan nilai ATS (Average Time to Signal) dan ANOS (Average Number of Observations to Signal ). Nilai ATS dan ANOS di peroleh dari pendekatan Rantai Markov. Dari hasil simulasi menggunakan nilai σ yang berbeda diperoleh bahwa pengambilan sampel dengan jumlah berbeda dan interval pengambilan yang berbeda tidak mempengaruhi pada kecepatan peta kendali dalam mendeteksi pergeseran yang kecil pada varians. Namun dapat meminimalisir jumlah sampel yang dibutuhkan selama pengendalian, sehingga dapat mengurangi biaya inspeksi pada laboratorium perusahaan.
Kata kunci: peta kendali adaptif, peta kendali R Shewhart dan pendekatan Rantai markov. 1. PENDAHULUAN
Untuk menjaga kualitas produk yang dihasilkan dan sesuai dengan tuntutan kebutuhan pasar perlu dilakukan pengendalian kualitas (quality control) pada kegiatan produksi yang dijalani. Pengendalian kualitas tersebut secara statistik disebut juga Statistical Process Control (SPC). Dalam SPC terdapat alat yang digunakan untuk mengendalikan kualitas produk yang disebut dengan peta kendali atau control chart.
Dalam pengendalian kualitas, karakter kualitas suatu produk yang dapat diukur secara
numerik dikendalikan dengan peta kendali yang menggunakan data kuantitatif, yang disebut juga peta kendali variabel. Peta kendali variabel yang biasanya dipakai adalah peta kendali Shewhart. Peta kendali Shewhart berfungsi dengan baik dalam mendeteksi pergeseran standar deviasi yang besar. Namun sering kali dalam situasi praktis akan dijumpai pergeseran standar deviasi yang kecil atau sedang (pergeseran varians σ ≤ 1,5), dalam kasus ini peta kendali R Shewhart kurang cepat mendeteksi pergeseran standar deviasi.
2 Ada tiga parameter yang dapat divariasi untuk meningkatkan kinerja peta kendali R yaitu ukuran sampel (n), interval waktu pengambilan sampel (h), dan koefisien batas pengendali (k).
Pada tugas akhir ini, dianalisis peta kendali R adaptif Variable Sample Size Interval (VSSI) dijadikan alternatif untuk meningkatkan kinerja peta kendali R. Kemudian peta kendali R adaptif akan dibandingkan kinerjanya dengan peta kendali R Shewhart. Untuk menguji kinerja peta kendali R adaptif ini dilakukan perbandingan berdasarkan nilai ATS (Average Time to Signal) dan ANOS (Average Number of Observations to Signal) dari peta kendali R adaptif dan peta kendali R Shewhart. Perhitungan dari ATS dan ANOS menggunakan pendekatan Rantai Markov.
2. TINJAUAN PUSTAKA 2.1 Peta Kendali
Pada dasarnya, peta kendali digolongkan menjadi dua, yaitu peta kendali variabel dan peta kendali atribut. Apabila karakteristik kualitas dapat diukur dan dapat dinyatakan dengan bilangan maka peta kendali ini disebut peta kendali variabel. Sedangkan apabila karakter kualitas suatu unit produk tidak dapat diukur dengan skala kuantitatif dan hanya dapat dinilai sebagai keadaan sesuai atau tidak sesuai maka peta kendali ini disebut peta kendali atribut.
Teori umum mengenai peta kendali pertama kali ditemukan oleh Dr. Walter A. Shewhart dengan model umum sebagai berikut:
CL
=
µ
w(2.1)
UCL =
µ
w+
k
σ
w(2.2)
LCL =
µ
w−
k
σ
w(2.3)
Dengan,
w : Statistik sampel yang mengukur
suatu karakteristik kualitas
wµ
: Mean dari w
wσ
: Deviasi standar dari w
k : Jarak batas-batas pengendali dari garis
tengah yang
dinyatakan dalam unit
standard deviasi
CL (Center Line) merupakan Garis
tengah dari peta kendali, UCL (Upper
Cotrol Limit) merupakan batas kendali atas
dari peta kendali, sedangkan LCL (lower
control limit) merupakan batas kendali
bawah dari peta kendali. Peta pengendali
variabel yang biasanya digunakan untuk
memantau standar deviasi adalah peta
kendali R Shewhart.
2.1.1 Peta Kendali R Shewhart
Peta kendali R Shewhart selalu digunakan untuk memantau variabilitas. Dengan asumsi pengamatan proses berdistribusi normal X ~ N(μ,σ). Semua sampel yang diambil secara acak dengan ukuran n dari populasi normal, range R = Xmax - Xmin. Dari model umum yang
ditunjukkan pada persamaan (2.1), persamaan (2.2) dan persamaan (2.3) garis tengah dan batas pengendali dari peta kendali R Shewhart dapat ditulis sebagai berikut:
R
CL
=
µ
=
R
(2.4) R Rk
UCL
=
µ +
σ
=
R
+
k
σ
R (2.5) R Rk
LCL
=
µ −
σ
Rk
R
−
σ
=
(2.6) Dengan:R
: rata-rata rangeσ
: standar deviasik : koefisien batas kontrol (biasanya k = 3)
3
d
: koefisien sampel n yang digunakan untuk mengestimasi mean dari sampelPeta kendali R Shewhart selalu digunakan untuk memantau variabilitas. Dengan asumsi pengamatan proses berdistribusi normal X ~ N(μ,σ). Semua sampel yang diambil secara acak dengan ukuran n dari populasi normal, range R = Xmax - Xmin. Dari model umum yang
3 (2.2) dan persamaan (2.3) garis tengah dan batas pengendali dari peta kendali R Shewhart dapat ditulis sebagai berikut:
R
CL
=
µ
=
R
(2.4) R Rk
UCL
=
µ +
σ
=
R
+
k
σ
R (2.5) R Rk
LCL
=
µ −
σ
Rk
R
−
σ
=
(2.6) Dengan:R
: rata-rata rangeσ
: standar deviasik : koefisien batas kontrol
3
d
: koefisien sampel n yang digunakan untuk mengestimasi mean dari sampel dengan n merupakan ukuran sampel 2d
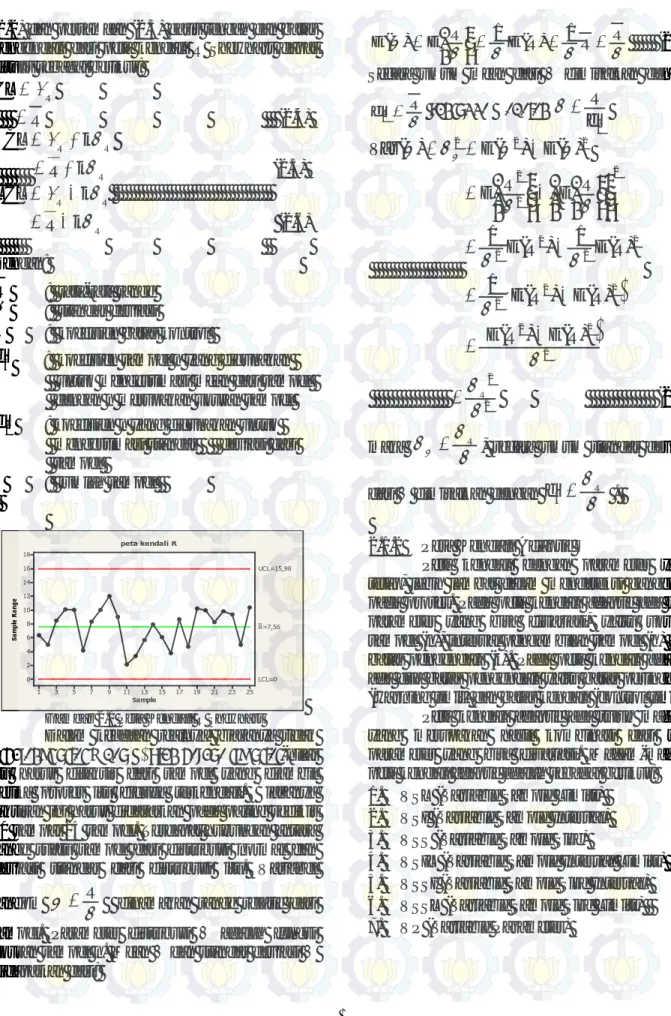
: koefisien n yang digunakan untuk mengestimasi standar deviasi dari sampel m : jumlah sampel 25 23 21 19 17 15 13 11 9 7 5 3 1 18 16 14 12 10 8 6 4 2 0 Sample Sa m pl e Ra ng e _ R=7,56 UCL=15,98 LCL=0 peta kendali RGambar 2.1 Peta Kendali R Shewhart
Dalam keadaan realnya, biasanya tidak diketahui nilai µ dan σ, oleh karena itu nilai-nilai itu harus ditaksir dari sampel yang diambil ketika proses itu diduga terkendali. Biasanya taksiran ini harus didasarkan pada paling sedikit 20 sampai 25 sampel. Terdapat hubungan antara range suatu sampel dari distribusi normal dan deviasi standar dari distribusi itu. Variabel random
ω
=σ
R dinamakan range relatif dari sampel. Parameter distribusi ω adalah fungsi ukuran sampel n. Mean ω dan standar deviasi ω didapatkan dari: σ σ σ σ ω E R E R R R E = = = = 1 ( ) 1 ) ( (2.7)Secara umum mean dari ω dimisalkan dengan
σ R d2 = sehingga σ adalah 2
d
R
=
σ
2 2 2)
(
)
(
)
(
ω
σ
ωE
ω
E
ω
Var
=
=
−
(
)
(
)
2 2 2 2 2 2 2 2 2 2 2 2 2 ) ( ) ( ) ( ) ( 1 ) ( 1 ) ( 1σ
σ
σ
σ
σ
σ
R E R E R E R E R E R E R E R E − = − = − = − =2 2
σ
σ
R=
(2.8)
maka
σ
ω=
σ
σ
R , secara umum standar deviasi dari ω dimisalkan dengand
3=
σ
σ
R .2.1.2 Peta Kendali Adaptif
Peta kendali dengan parameter yang tetap, lebih lambat dalam mendeteksi gangguan pada proses. Pada peta kendali adaptif ada tiga parameter yang bisa divariasi, yaitu ukuran sampel (n), interval pengambilan sampel (h) dan batas pengendali (k). Pada peta kendali adaptif ada dua batas pengendali yaitu batas peringatan (warning limit) dan batas kendali (control limit). Peta kendali adaptif ada tujuh macam, yang merupakan hasil kombinasi dari tiga parameter yang bisa divariasi. Macam-macam peta kendali adaptif adalah sebagai berikut: 1. VSL (Variable Sample Limits) 2. VSI (Variable Sample Interval) 3. VSS (Variable Sample Size)
4. VSIL (Variable Sample Interval Limits) 5. VSSI (Variable Sample Size Interval) 6. VSSL (Variable Sample Size Limits) 7. VP (Variable Parameter)
4 Dalam peta kendali adaptif pengendaliannya diasumsikan menjadi dua keadaan, yaitu:
1. Keadaan 1 : Pengendalian Longgar 2. Keadaan 2 : Pengendalian Ketat
Ketika range dari sampel diplot kemudian jatuh dekat dengan batas range yang ditentukan range atau mendekati nol, maka peta kendali di desain dengan sampel kecil (n1), interval panjang (h1),
koefisien control limit (k1) dan koefisien
warning limit (w1) besar. Keadaan ini yang
disebut pengendalian longgar. Ketika rata-rata range dari sampel diplot kemudian jatuh dekat control limit tapi belum di luar control limit, maka peta kendali di desain dengan ukuran sampel besar (n2), interval pengambilan sampel
pendek (h2), koefisien control limit (k2) dan
koefisien warning limit (w2) besar. Keadaan ini
yang disebut pengendalian ketat. 2.5 Pendekatan Rantai markov
Andaikan suatu proses diamati pada waktu n = 0,1,2..., dan misalkan Xn adalah keadaan
(state) dari proses saat n. Barisan variabel random {X0,X1,X2,...} disebut proses stokastik
dengan waktu diskrit, dan ditulis sebagai {Xn,
n≥0}. Menurut Kulkarni (1998) rantai markov diskrit adalah suatu proses stokastik dengan state space diskrit dan parameter space (waktu proses) diskrit. Dalam rantai markov probabilitas suatu state pada waktu ke- (n+1) hanya tergantung pada kondisi state pada waktu ke – n, dan tidak tergantung pada kondisi dari waktu-waktu sebelumnya. Dinotasikan dengan
P(Xn+1 = j|Xn=i,Xn-1,...X0) = P(Xn+1=j|Xn=i) (2.9)
Misalkan S = {1,2,3}
Matriks probabilitas transisi dapat disusun:
=
33 32 31 23 22 21 13 12 11p
p
p
p
p
p
p
p
p
P
(2.10)Dengan :
ijp : probabilitas jika keadaan sekarang
berada pada i dan
keadaan berikutnya berada di pada j
3. HASIL DAN PEMBAHASAN 3.1 Analisis Peta Kendali R Adaptif
Prinsip dari peta kendali R adaptif hampir sama dengan peta kendali R Shewhart, sehingga batas pengendalinya juga sama. Hanya saja pada peta kendali R adaptif ini ditambah dengan batas paringatan. Sehingga peta kendali R Adaptif mempunyai dua batas, yaitu batas kendali dan batas peringatan. Pada peta kendali R adaptif, ukuran sampel (n), interval pengambilan sampel (h) dan batas pengendali (k) divariasi, tergantung pada posisi range sampel pada pengambilan sebelumnya. Peta kendali R adaptif mempunyai 7 macam. Namun dalam tugas akhir ini hanya 3 macam yang dianalisis, yaitu peta kendali R adaptif VSS, peta kendali R adaptif VSI dan peta kendali R adaptif VSSI.
Batas kendali dari peta kendali R adaptif adalah sebagai berikut: R
k
R
UCL
=
+
σ
Rw
R
UWL
=
+
σ
R
GT
=
=
d
2σ
0R
k
R
LCL
=
−
σ
R
w
R
LWL
=
−
σ
Dengan,
k : koefisien batas kendali w : koefisien batas warning
3.1.1 Peta Kendali R Variable Sampel Size (VSS)
Pengambilan sampel pada peta kendali R VSS dapat dinotasikan sebagai berikut :
n2, h jika UWL< Ri-1 <UCL
[n(i), h(i)] = n1, h jika UWL< Ri-1 < LWL
n2, h jika LWL< Ri-1 < LCL
3.1.2 Peta Kendali R Variable Sample Interval (VSI)
Pengambilan sampel pada peta kendali R VSI dapat dinotasikan sebagai berikut :
n, h1 jika UWL< Ri-1 <UCL
[n(i), h(i)] = n, h2 jika UWL< Ri-1 < LWL
n, h1 jika LWL< Ri-1 < LCL
3.1.3 Peta Kendali R Variable sample size Interval (VSSI)
Pengambilan sampel pada peta kendali R VSSI dapat dinotasikan sebagai berikut:
5 [n(i), h(i)] = n1, h2 jika UWL< Ri-1 < LWL
n2, h1 jika LWL< Ri-1 < LCL
3.2 Mencari Rumus ATS dan ANOS dari Peta Kendal R Adaptif Berdasarkan Pendekatan Rantai Markov
Hasil analisis Menggunakan pendekatan Rantai Markov untuk mendapatkan rumus dari ATS dan ANOS adalah sebagai berikut:
3.2.1 Mendefinisikan Parameter State Space pada Rantai Markov
Dalam tugas akhir ini, pendekatan yang digunakan untuk mendapatkan rumus ATS dan ANOS adalah Rantai Markov Diskrit. Rantai Markov Diskrit mempunyai state space diskrit dan parameter space (waktu proses) diskrit pula. Dalam hal ini sifat markovnya adalah perpindahan posisi range sampel saat sift ke- (n+1) hanya tergantung pada posisi range sampel pada sift ke-n. Dengan n merupakan waktu pengamatan, maka n ≥ 0. Himpunan state spacenya S = {1,2,3}.
State space (Xn) yang digunakan ada 3,
yaitu:
State 1. Proses dalam keadaan in control dan range sampel jatuh di daerah tengah State 2. Proses dalam keadaan in control dan
range sampel jatuh di daerah peringatan State 3. Proses dalam keadaan out of control
Perpindahan posisi range sampel, untuk semua i dan j dalam S, dapat dinotasikan dengan
P (Xn+1 = j│Xn = i, Xn-1,...,X0) = P (Xn+1 = j│Xn = i)
(4.9) 3.2.2 Mencari Matriks Transisi
Untuk mendapatkan nilai ATS dan ANOS melalui pendekatan rantai markov, perlu dibentuk matriks transisi probabilitas. Probabilitas transisi satu langkah yang bersifat homogen dapat ditulis
pij =p (Xn+1 = j│Xn = i); i,j=1,2,3
(4.10)
Berdasarkan state space yang sudah didefinisikan, matriks transisi probabilitasnya dapat ditulis sebagai :
=
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
33 32 31 23 22 21 13 12 11γ
γ
γ
γ
γ
γ
γ
γ
γ
p
p
p
p
p
p
p
p
p
P
(4.11) Dengan : ) (γ
ijp
: probabilitas apabila range sampel
sekarang berada di daerah i, range
sampel berikutnya berada di daerah
j, saat range mengalami pergeseran
sebesar γ standar deviasi
Apabila nilai j=1 berarti range sampel jatuh
pada daerah tengah (central region),
sedangkan ketika nilai j = 2 berarti range
sampel jatuh di daerah peringatan (warning
region). Apabila nilai i = 1 berarti sampel
yang diambil berukuran kecil (n
1) dan
interval pengambilan sampel panjang (h
1),
sedangkan apabila nilai i = 2 berarti sampel
yang diambil berukuran besar (n
2) dan
interval pengambilan sampel pendek (h
2).
Pada matriks P akan dihilangkan
elemen matriks yang berhubungan dengan
proses yang out of control. Dalam keadaan
out of control tersebut proses harus
dihentikan dan dicari penyebab terjadinya
gangguan. Sehingga matriks tersebut dapat
ditulis sebagai berikut
= ) ( ) ( ) ( ) ( ) ( 22 21 12 11
γ
γ
γ
γ
γ
p p p p Q(4.12)
Nilai anggota matriks transisi diperoleh
dari :
)
(
)
(
1 0 11γ
=
P
R
≤
UWL
σ
=
γσ
p
R dan UWL dibagi dengan
σ
)
(
)
(
0 1 11γ
ω
γσ
UWL
P
p
=
≤
; dengan
σ
ω
=
R
−
≤
−
=
3 2 0 1 3 2 11(
)
d
d
UWL
d
d
P
p
γ
ω
γσ
6 − ≤ = 3 2 0 1 11( ) d d UWL Z P p γ γσ
(4.13)
2d
merupakan mean dari
ω dan
3
d merupakan standard deviasi dari
ω
)
(
)
(
1 1 0 12γ
=
P
UWL
≤
R
≤
UCL
σ
=
γσ
p
≤ − ≤ = 0 1 0 1
γσ
ω
γσ
ω
UCL P UWL P;
dengan
σ
ω
=
R
2d
merupakan mean dari
ω dan
3
d merupakan standard deviasi dari
ω
− ≤ − − ≤ = 3 2 0 1 3 2 0 1 12 d d UWL Z P d d UCL Z P p γσ γσ
(4.14)
)
(
)
(
2 1 0 21γ
=
P
R
≤
UWL
σ
=
γσ
p
− ≤ − = 3 2 0 2 3 2 21( ) d d UWL d d P p γ ω γσdengan
σ
ω
=
R
− ≤ = 3 2 0 2 21( ) d d UWL Z P pγ
γσ
(4.15)
2d
merupakan mean dari
ω dan
3
d merupakan standard deviasi dari
ω
)
(
)
(
2 2 0 22γ
=
P
UWL
≤
R
≤
UCL
σ
=
γσ
p
karena
σ
ω
= sehingga dapat ditulis sebagai
R
berikut
≤ − ≤ = 0 2 0 2 22(γ
)ω
γσ
ω
γσ
UWL P UCL P pKeduanya dikurangi dengan d
2kemudian
dibagi dengan d
3 − ≤ − − − ≤ − = 3 2 0 2 3 2 3 2 0 2 3 2 22( ) d d UWL d d P d d UCL d d P p γ ω γσ ω γσ − ≤ − − ≤ = 3 2 0 2 3 2 0 2 22( ) d d UWL Z P d d UCL Z P p γ γσ γσ(4.16)
Karena kengamatan Z berdistribusi
normal stan
dar dengan µ = 0 dan σ = 1,
sehingga nilai P ( Z
≤ z ) dapat diperoleh
dari tabel CDF distribusi normal standar.
4.1.1 Mendapatkan Matriks Probabilitas dari Proses in control
Diberikan nT = [n1 n2] merupakan matriks
transpos dari ukuran sampel, hT = [h1 h2]
merupakan matriks transpos dari interval pengambilan sampel, I merupakan matriks identitas dengan order 2 × 2 dan rT = [r1 r2]
didefinisikan sebagai probabilitas keadaan awal. Ketika proses dalam keadaan in-control peluang range sampel jatuh pada daerah tengah atau daerah peringatan dapat dihitung dengan rT .
Diberikan p1 adalah peluang range jatuh
pada daerah tidakan dan p2 adalah peluang range
jatuh di daerah peringatan. Untuk mendapatkan nilai p1 dan p2 adalah sebagai berikut
) ( ) ( 1 1 1 UCL R P UWL R P p ≤ ≤ =
) ( ) ( 2 2 2 UCL R P UWL R P p ≤ ≤ =
Dari nilai-nilai peluang tersebut dapat dibentuk matriks probabilitas awal
rT + − − + − = 2 1 1 2 1 2 1 1 1 p p p p p p
4.2 Menghitung nilai ATS masing-masing peta kendali
Untuk simulasi perhitungan ATS digunakan koefisien batas kendali k = 3 dan koefisien batas peringatan w = 2, sedangkan nilai standar deviasi yang dipilih adalah standar deviasi kecil untuk data kandungan air pada
7 pupuk UREA yaitu σ0 = 0.07, 0.08 dan 0.09. Hasil perhitungan ATS dan ANOS masing-masing peta kendali adalah sebagai berikut:
4.3 Membandingkan peta kendali R VSS, peta kendali R VSI, peta kendali R VSSI dan peta kendali R Shewhart
Setelah dilakukan simulasi dengan tiga nilai σ0 dan beberapa nilai γ, masing-masing peta kendali dapat dibandingkan kecepatannya dalam mendeteksi pergeseran yang kecil pada varians, semakin kecil nilai ATS dan ANOS semakin baik kinerja peta kendali. Dari tabel-tabel nilai ATS dan ANOS dapat dianalisis sebagai berikut:
1. Perbandingan peta kendali R VSSI dan R VSS
Peta kendali R VSS lebih cepat mendeteksi pergeseran pada semua nilai σ0 dan semua γ. Untuk jumlah sampel yang dibutuhkan sama besarnya antara peta kendali R VSSI dan R VSS.
2. Perbandingan peta kendali R VSSI dan R VSI
Untuk nilai σ0 = 0,07 peta kendali R VSSI lebih cepat mendeteksi pergeseran saat γ = 1,1.1 dan 3, sedangkan saat γ selain itu lebih cepat peta kendali R VSI. Untuk nilai σ0 = 0,08 peta kendali R VSSI lebih cepat mendeteksi pergesetan saat γ = 1 dan 1.1,namun untuk γ yang lainnya lebih cepat kinerja peta kendali R VSI. Untuk σ0 = 0,09 peta kendali R VSI bekerja lebih cepat pada semua γ. Untuk jumlah sampel yang dibutuhkan lebih sedikit peta kendali R VSI.
3. Perbandingan peta kendali R VSSI dan R Shewhart
Peta kendali R Shewhart lebih cepat mendeteksi pergeseran pada semua nilai σ0 dan semua γ. Untuk jumlah sampel yang dibutuhkan lebih sedikit peta kendali R VSSI.
4. Perbandingan peta kendali R VSS dan R VSI
Peta kendali R VSI lebih cepat mendeteksi pergeseran pada semua nilai σ0 dan semua γ. Untuk jumlah sampel yang dibutuhkan lebih sedikit peta kendali R VSS.
5. Perbandingan peta kendali R VSS dan R Shewhart
Untuk nilai σ0 = 0,07 peta kendali R VSS lebih cepat mendeteksi pergeseran saat γ = 1,1.1 dan 3, sedangkan saat γ selain itu lebih cepat peta kendali R Shewhart. Untuk nilai σ0 = 0,08 peta kendali R VSS lebih cepat mendeteksi pergesetan saat γ = 1 dan 1.1,namun untuk γ yang lainnya lebih cepat kinerja peta kendali R Shewhart. Untuk σ0 = 0,09 peta kendali R Shewhart bekerja lebih cepat pada semua γ. Untuk jumlah sampel yang dibutuhkan lebih sedikit peta kendali R VSS.
6. Perbandingan peta kendali R VSI dan R Shewhart
Peta kendali R Shewhart lebih cepat mendeteksi pergeseran pada semua nilai σ0 dan semua γ. Untuk jumlah sampel yang dibutuhkan lebih sedikit peta kendali R Shewhart.
4. Kesimpulan
Peta kendali R yang menerapkan dua sifat peta kendali adaptif yaitu ukuran sampel dan interval pengambilan sampel yang divariasi, ternyata tidak selamanya lebih cepat dalam mendeteksi pergeseran yang kecil pada varians, hanya pada σ0 dan γ tertentu saja bisa lebih cepat dalam mendeteksi pergeseran kecil. Namun kelebihan dari peta kendali R adaptif adalah jumlah sampel yang dibutuhkan lebih kecil dari peta kendali R Shewhart sehingga bisa mengurangi biaya inspeksi bagi perusahaan.
5. DAFTAR PUSTAKA
Ariani, D.W. 2004. ”Pengendalian Kualitas StatistikPendekatan Kuantitatif dalam Managemen Kualitas”. Yogyakarta: ANDI. Costa, A.F.B. 1994. ”X charts with variable
sample size”. J. Qual. Technol. 26, 155–163. Kulkarni, V.G. 1998. Modeling, Analysis,
Design, and Control of Stochastic Systems. Springer.
Lee, P. H. 2011.” Adaptive R charts with variable parameters”. Computational Statistics and Data Analysis 55 (2011) 2003–2010.
Montgomery, D.C. 1990. “Pengantar Pengendalian Kualitas Statistik”. Yogyakarta: Gadjah Mada University Press.