PERANCANGAN SISTEM
3.1 Definisi Masalah
Pada dewasa sekarang ini sangat banyak terdapat sistem dimana sistem tersebut sudah terintegrasi dengan komputer, dengan terintegrasinya sistem tersebut dengan komputer, sangat memudahkan bagi pengguna-nya, karena sistem tersebut sudah ter-otomatisasi dan membuat performa sistem menjadi lebih baik.
Pada sistem yang ditempatkan di area terbuka maka pencahayaan akan menjadi faktor hambatan dalam performa sistem, bilamana pencahayaan buruk, maka gambar yang ditangkap oleh kamera juga akan terpengaruh. Pencahayaan akan mempengaruhi kualitas gambar, baik tinggi atau rendahnya intensitas cahaya yang masuk jadi harus di tentukan batas minimum dan batas maksimum yang dapat diterima oleh sistem. Perhitungan kecepatan yang menjadi tujuan dari perancangan sistem ini sangat dipengaruhi oleh faktor cahaya yang dibahas sebelumnya, sistem dapat ‘mengamati’ dengan bantuan cahaya dan sistem dapat menghitung kecepatan juga karena ‘mengamati’. Tingkat cahaya bukan hanya dipengaruhi oleh sumber cahaya itu sendiri, tapi juga lingkungan dapat mempengaruhi, pemantulan merata terhadap ruangan ataupun tidak merata membuat pembagian cahaya yang masuk ke sistem berbeda, oleh sebab itu pada implementasi akan terlihat bagaimana efek pencahayaan terhadap sistem.
Pada topik ini penulis mengangkat bagaimana sebuah sistem yang terintegrasi dengan kamera dapat membantu dalam menentukan kecepatan sebuah benda bergerak, banyak sekali alat yang digunakan sekarang ini untuk menentukan kecepatan benda, baik dengan teknik suara atau dengan laser. Pada topik ini digunakan computer vision untuk membantu dalam menentukan kecepatan benda, camera (webcam) digunakan untuk mengambil gambar dari 1 tempat/fokus yang sudah ditentukan dari awal, beberapa teknik segmentasi akan digunakan dalam perancangan ini, dan algoritma yang ditempatkan pada program untuk menentukan kecepatan benda tersebut.
Beberapa hal yang perlu diperhatikan, oleh karena sistem ini menggunakan kamera untuk mengambil gambar, maka tentunya terdapat kalibrasi, yaitu bagaimana menselaraskan ukuran pada gambar terhadap ukuran aslinya, agar hasil yang didapat berbentuk ukuran sebenarnya. Hasil dalam bentuk gambar akan diproses oleh software sehingga mendapatkan informasi dari kecepatan benda tersebut.
Berdasarkan bahan – bahan yang telah dibahas, maka lingkungan, hardware, dan juga cahaya adalah beberapa faktor masalah yang terdapat, dan faktor – faktor ini diluar dari faktor – faktor yang tidak diduga seperti kejadian alam, dan lain – lainnya.
3.2 Perancangan Umum Sistem Pengukuran Kecepatan
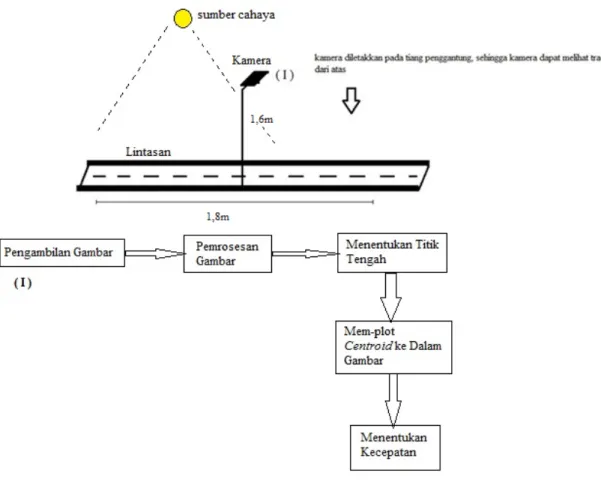
Gambar 3.1 Sistem Secara Menyeluruh
Gambar diatas merupakan ilustrasi rancangan sistem “Menghitung Kecepatan Menggunakan Computer Vision” secara keseluruhan.
Perancangan sistem dilakukan didalam ruangan (indoor) sehingga objek hanya mendapatkan pencahayaan yang datang dari lampu ruangan, pada landasan teori telah dijelaskan bagaimana sebuah cahaya yang dipantulkan terhadap lingkungan sehingga memancarkan balik bentuk dari lingkungan tersebut, berarti sifat dasar dari lingkungan mempengaruhi pemantulan cahaya, karena ruangan indoor maka aspek yang mempengaruhi adalah warna pada dinding ruangan, besar ruangan, peletakan sumber cahaya terhadap besar ruangan, dan lain – lainnya.
Adapun rumus yang digunakan untuk menentukan tinggi kamera terhadap lintasan yang digunakan, rumus ini bertujuan untuk mempermudah kalibrasi gambar terhadap panjang lintasan, dan agar hasil yang ditangkap kamera sesuai dengan ukuran frame pada kamera itu sendiri. Pada tiap kamera area (field view) yang dapat ditangkap mungkin berbeda sesuai dengan spesifikasi hardware masing – masing, pada kamera
Logitech c270 ini field view yang dapat ditangkap sekitar 60°.
Dimana :
z = Jarak antara kamera dengan lintasan d = Jarak / panjang lintasan
s1 = Panjang sisi luar view kamera
s2 = Panjang sisi luar view kamera
1 = Sudut pada setengah view bagian kiri 2 = Sudut pada setengah view bagian kanan
Berdasarkan rumus segitiga di atas, maka nilai z dapat diketahui, yaitu tinggi kamera yang dibutuhkan agar gambar yang diambil tidak keluar dari frame, dengan memasukkan nilai 1 / 2 dan d1 / d2, maka z akan diketahui.
Berikut adalah perancangan yang dilakukan untuk mencari tinggi kamera.
Berdasarkan pembulatan terhadap angka yang didapat, maka didapatkan tinggi kamera yang akan dipakai sekitar 1,6m.
Dengan demikian maka kalibrasi dapat dilakukan lebih mudah, kalibrasi awal dilakukan dengan menyocokkan frame gambar yang didapat dengan ukuran sebenarnya pada
frame, berikut adalah tahap – tahap yang dilakukan untuk melakukan kalibrasi terhadap frame pada gambar.
(b)
Gambar 3.2 (a) dan (b) Penempatan Posisi Kamera Terhadap Lintasan
Gambar diatas menjelaskan bagaimana penempatan kamera berdasarkan perancangan yang telah dibuat, setelah penempatan selesai, maka akan dilanjutkan dengan kalibrasi terhadap frame gambar yang telah didapat.
Gambar 3.3 Kalibrasi Terhadap Lintasan
Setelah proses peletakan objek dan pengaturan posisi kamera sudah dilakukan, maka kalibrasi dilakukan secara manual, kalibrasi yang dilakukan adalah menentukan
lebar dan panjang dari frame gambar yang diambil oleh kamera, apakah frame gambar sudah sesuai dengan ukuran skala yang akan digunakan untuk algoritma menentukan kecepatan. Proses kalibrasi manual menggunakan Logitech Webcam Software untuk melihat hasil kamera, kemudian digunakan pengamatan secara visual dan pengukuran manual panjang dan lebar lintasan yang tertangkap oleh kamera terhadap jumlah pixel pada gambar, gambar yang diperoleh dari webcam akan diukur panjang dan lebarnya dalam pixel, panjang dan lebar dari lintasan sebenarnya akan diukur secara manual, sampai panjang dan lebar sebenarnya berada pada angka yang mudah untuk diproses. x1 dan x2 adalah ukuran panjang dan lebar dari frame gambar yang didapat dari webcam, ukuran x1 dan x2 di harapkan sebuah angka yang nilainya integer, sehingga angka tersebut lebih mudah diperoses dibandingkan angka yang mempunyai beberapa digit dibelakang koma.
Rumus yang digunakan untuk mengkonversi ukuran panjang dan lebar lintasan ke dalam satuan pixel adalah sebagai berikut :
X =
Y =
Berdasarkan hasil dari kalibrasi manual selesai dilakukan, maka webcam akan menangkap gambar dari obyek, dan kemudian setiap gambar yang sudah ditangkap akan diproses, seperti grayscaling, thresholding, mencari centroid, dan yang terakhir adalah menentukan kecepatan benda tersebut dengan algoritma yang sudah ditetapkan, dan
hasil dari percobaan dapat dianalisa apakah hasil yang didapat sesuai dengan harapan dan tujuan dari topik skripsi ini.
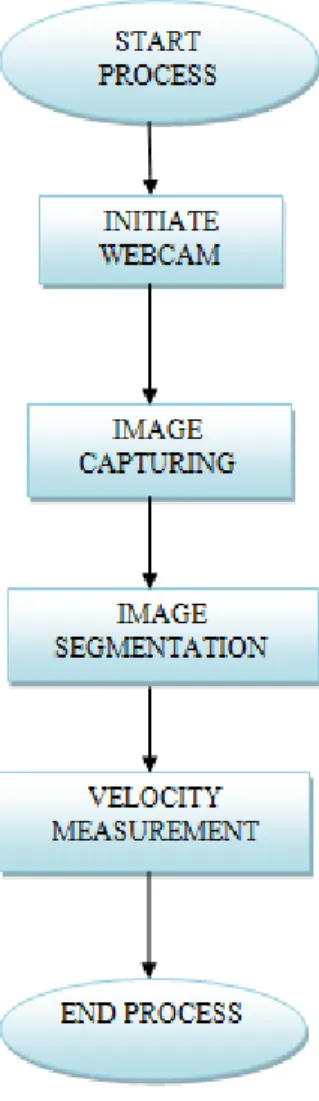
Berikut adalah diagram alir (flowchart) dari perancangan umum sistem “Menghitung Kecepatan Menggunakan Computer Vision”
Gambar 3.4 Diagram Alir Secara Keseluruhan
Pada sistem ini diawali dengan initiate webcam, yaitu melakukan pengaturan terhadap kamera sehingga kamera dapat digunakan oleh sistem, kemudian dilanjutkan dengan image capturing, yaitu sistem melakukan pengambilan gambar sesuai dengan pengaturan awal terhadap kamera.
Berdasarkan hasil dari pengambilan gambar selesai maka hasil dari pengambilan gambar akan disimpan kedalam sebuah directory dimana program tersebut terletak, kemdian sistem dilanjutkan dengan image segmentation, dimana program memproses gambar hasil dari proses sebelumnya, tujuan dari segmentasi adalah membuat gambar dapat dikenali oleh sistem, sehingga sistem dapat melakukan penghitungan matematik terhadap obyek yang di tangkap, setelah segmentasi selesai maka akan masuk ke proses
velocity measurement dimana sistem menghitung kecepatan dari benda atau objek yang
diamati.
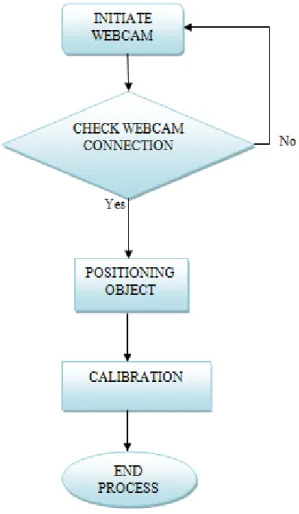
Berikut adalah diagram alir proses inisialisasi webcam :
Proses inisialisasi webcam dimulai dengan mengecek koneksi dari webcam,
apakah webcam sudah terhubung dengan personal computer atau belum, lalu masuk ke
positioning object yang dilakukan secara manual, karena pada percobaan ini penguji
menggunakan mobil mainan yang harus diletakkan terlebih dahulu maka penguji harus meletakkannya kedalam track atau lintasan yang sudah disediakan.
Berdasarkan hasil dari proses sebelumnya selesai, maka proses masuk ke kalibrasi, didalam kalibrasi terdapat pertimbangan ukuran terhadap ukuran sebenarnya. Pertimbangan ukuran yang terdapat pada gambar terhadap ukuran yang sebenarnya adalah yang menentukan algoritma dalam menghitung kecepatan, karena pada algoritma itu dibutuhkan sebuah ukuran yang sebenarnya dari obyek dan dari lintasan, sehingga kalibrasi sangat digunakan dalam hal ini. Kalibrasi dilakukan secara visual hingga didapatkan ukuran yang cocok dan sesuai. Inisialisasi dilakukan hanya pada kondisi awal atau saat sistem harus merubah mode-nya, contohnya sistem pada ketinggian 1 meter dengan sistem pada ketinggian 3 meter, maka harus melakukan inisialisasi ulang pada blok initiate webcam, untuk menyesuaikan tinggi sistem dengan algoritma perhitungan kecepatan dan juga hasil dari image capturing.
3.3 Perancangan Sistem Pengambilan Gambar
Pada perancangan ini, akan membahas bagaimana sistem dapat mengambil sebuah gambar terhadap lingkungan yang di ‘amati’nya, pada bab sebelumnya diceritakan bahwa sebuah kamera dapat digunakan untuk ‘mengawasi’ sebuah lingkungan, dalam ‘mengawasi’ tersebut harus ada pengambilan gambar yang dianalisa, untuk mendapatkan gambar tersebut, maka sistem harus mengatur selang waktu (sampling time) agar kamera dapat mendapatkan gambar sesuai dengan waktu yang diinginkan. Selang waktu (sampling time) mempengaruhi hasil dari image capturing
(pengambilan gambar), semakin besar sampling time maka terjadinya pengambilan gambar semakin lama. Berdasarkan beberapa teori yang telah dikumpulkan maka perancangan dalam pengambilan gambar dapat di gambarkan seperti berikut :
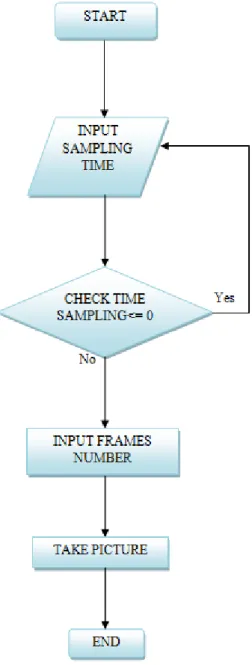
Gambar 3.6 Diagram Alir Sistem Pengambilan Gambar
Proses pengambilan gambar pada sistem ini diawali dengan input sampling time, Sistem akan melakukan pengambilan gambar selama selang waktu t detik berdasarkan
detik, maka input sampling time harus bernilai 1, dan nilai yang sudah dimasukkan akan disimpan oleh sistem untuk dijalankan terus menerus. Input sampling time tidak boleh 0, karena kamera tidak mungkin dapat mengambil gambar tanpa selang waktu, bila itu terjadi maka akan terjadi kerusakan hardware. Gambar akan diambil secara perframe, artinya setiap rekaman gambar dari kamera akan diambil selama tiap selang waktu t, dan banyak frame yang akan diambil oleh kamera telah disesuaikan pada ujicoba ini, misalkan banyak frame yang diinginkan adalah 10, maka kamera akan mengambil gambar selama selang waktu t dan akan terus melakukan pengambilan gambar selama sepuluh kali, lalu setelah semua pengaturan telah dilakukan maka sistem akan masuk ke dalam tahap pengambilan gambar, kamera akan mengambil gambar sesuai dengan inputan yang diberikan. Sebuah kamera dipengaruhi oleh karakteristik hardware yang dibawanya, pada kamera yang dipakai pada skripsi ini, input sampling time tidak kurang dari 0.5 detik.
3.4 Perancangan Sistem Pengolahan Gambar
Berdasarkan hasil dari proses pengambilan gambar selesai, maka sistem akan mengolah gambar dan memberikan output hasil segmentasi.
Pada pembahasan bab sebelumnya, pengolahan gambar (segmentation) dikaitkan dengan pemecahan suatu gambar terhadap proses – proses segmentasi yang merubah gambar asli menjadi gambar digital yang dapat dianalisa oleh sistem, sistem pengolahan gambar adalah bagian terpenting dalam menentukan obyek, sehingga obyek dapat dianalisa. Dengan dasar – dasar teori yang telah di kumpulkan pada bab sebelumnya, dan juga dengan hasil pengambilan gambar, maka akan dilakukan proses pengolahan
gambar yang bertujuan untuk mendapatkan titik tengah (centroid) dari obyek yang diamati.
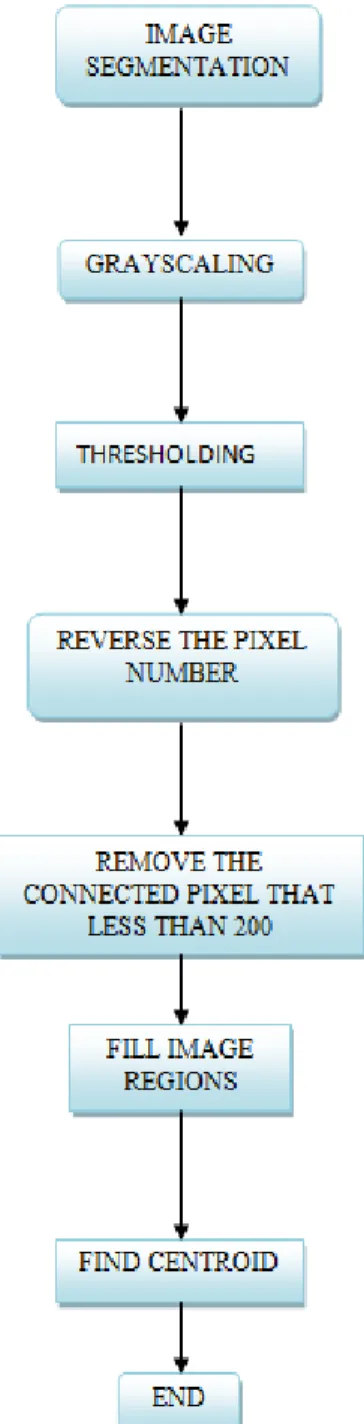
Berikut adalah diagram alir dari perancangan yang didasarkan pada dasar – dasar teori yang didapat pada bab sebelumnya :
Sistem pengolahan gambar adalah bagian dimana computer vision menjadi penting digunakan, karena dengan computer vision maka sistem dapat mengenali obyek yang telah ditangkap oleh kamera. Pada pengolahan gambar atau dalam computer vision biasa disebut segmentasi terjadi banyak proses yang melibatkan manipulasi terhadap sebuah gambar, seperti telah dijelaskan pada bab sebelumnya berbagai manipulasi terhadap gambar yang dapat dilakukan.
Pada pengolahan gambar pada percobaan ini diawali oleh grayscaling, yaitu proses perubahan/pergeseran nilai pixel dari gambar berwarna (RGB) 24bit menjadi gambar dalam gray-level 8 bit yang memudahkan komputer untuk memanipulasinya.
Grayscaling dilakukan untuk mempermudah pengolahan gambar karena intensitas
warna yang diperlukan dalam sistem ini hanya ada dua, yaitu hitam dan putih, sehingga warna RGB dapat diubah sehingga proses menjadi lebih sederhana. Proses grayscaling dilakukan dengan meratakan nilai pixel dari 3 nilai RGB menjadi 1 nilai. Salah satu presentasi yang sering digunakan adalah 29,9% warna merah (Red), 58,7% warna hijau (Green), dan 11,4% warna biru (Blue). Nilai pixel didapat dari jumlah presentasi 3 nilai tersebut.
Pada Matlab perubahan warna pixel menjadi grayscale tersebut dilakukan pada tiga matriks (Red, Green, Blue), lalu nilai warna pada setiap matriks (Red, Green, Blue) dijumlahkan kemudian dibagi sebuah nilai yang sudah ditentukan.
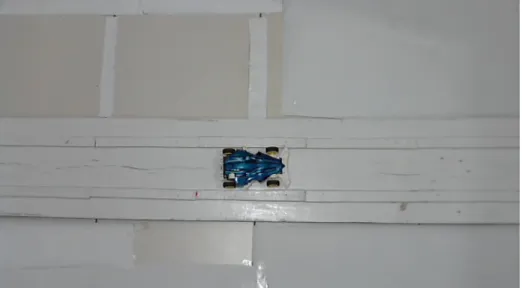
Gambar 3.8a RGB ( Original )
Gambar 3.8b Hasil Grayscaling
Pada gambar diatas, gambar original diproses kedalam Matlab dengan proses perhitungan RGB sebagai berikut :
0.2989 * R + 0.5870 * G + 0.1140 * B
Berdasarkan hasil dari perhitungan diatas, maka didapatkan hasil grayscaling seperti pada gambar 3.9.
Setelah selesai proses grayscaling maka akan dilanjutkan kedalam proses thresholding, diantara kedua proses ini disisipkan proses filtering yaitu imtophat filtering yang berfungsi menselaraskan pencahayaan background dengan foreground.
Thresholding adalah proses dimana gambar akan dibuat menjadi binary image,
perlu diketahui bahwa grayscaling hanya mengubah derajat gambar berwarna menjadi gambar yang keabu-abuan, sehingga memudahkan proses segmentasi, setelah gambar menjadi abu-abu maka akan memudahkan dalam penentuan gambar binernya.[ [1] Otsu, N., "A Threshold Selection Method from Gray-Level Histograms," IEEE Transactions on Systems, Man, and Cybernetics, Vol. 9, No. 1, 1979, pp. 62-66].
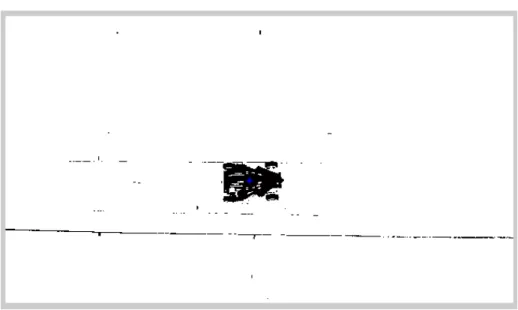
Hasil dari proses thresholding dapat dilihat pada gambar dibawah.
Gambar 3.9 Hasil Thresholding
Hasil dari thresholding berupa gambar biner yang hanya mempunyai nilai 0
(hitam) atau 1 (putih).
Thresholding sangat diperlukan dalam menentukan objek yang akan dianalisa, tetapi pada gambar diatas masih terdapat banyak sekali noise, noise - noise tersebut
adalah sisa – sisa dari grayscaling yang terdapat pada background gambar. Dalam proses segmentasi ini gambar biner adalah hasil akhir yang dibutuhkan untuk mengenali obyek, tetapi dalam proses-nya gambar biner yang diinginkan adalah apabila pixel yang terdapat pada obyek bernilai 1 atau putih, sehingga antara background dengan objek terdapat perbedaan, dan biasanya background berwarna gelap untuk perhitungan yang lebih mudah. Oleh karena itu sistem harus mengubah (invert) pixel didalam gambar dari putih ke hitam, dan begitu juga sebaliknya.
Hasil dari proses reverse pixel dapat dilihat pada gambar dibawah.
Gambar 3.10 Hasil Reverse Pixel
Gambar diatas adalah hasil reverse pixel dari gambar sebelumnya, semua pixel yang bernilai 1 akan berubah menjadi 0, dan begitu juga sebaliknya. Proses yang terdapat pada reverse pixel bisa dikatakan sederhana, karena algoritmanya hanya membaca variabel yang menyimpan nilai pixel lalu menguranginya dengan angka 1. Contoh :
Apabila terdapat pixel yang berwarna putih ingin di reverse menjadi pixel yang berwarna hitam, maka dapat dilakukan dengan cara
1 – pixel awal = reverse pixel 1 – 1 = 0
Berdasarkan rumus diatas, maka pixel akhir yang telah dibalik akan berubah nilainya, oleh sebab itu maka hasil dari gambar akan berubah nilai pixel-nya.
Setelah proses pembalikkan nilai pixel (inverting) terlihat masih banyak noise yang terdapat pada gambar, filtering tidak dapat menghilangkan noise seperti ini, untuk menghilangkan noise – noise ini maka dibutuhkan algoritma yang dapat membedakan objek dengan noise, dengan memisahkan objek dengan noise maka dengan mudah noise dapat dihilangkan.
Algoritma yang dibutuhkan yaitu menghitung jumlah pixel dalam objek tersebut, setelah didapat jumlah pixel yang terdapat pada objek yaitu mobil, maka dapat diketahui bahwa setiap pixel yang jumlahnya kurang dari jumlah pixel mobil tersebut adalah noise, sehingga jumlah pixel yang kurang tersebut dapat kita hapus atau dihilangkan.
Hasil dari proses removing pixel dapat dilihat pada gambar dibawah.
Berdasarkan gambar di atas, noise – noise telah hilang dengan cara menghilangkan pixel yang berhubungan (connected) yang nilainya tidak lebih besar dari nilai yang sudah ditentukan.
Berdasarkan proses tersebut, maka pada awalnya memang harus ditentukan terlebih dahulu batas minimal jumlah pixel yang dianggap noise, sehingga sistem tidak mengalami kebingungan dalam menentukan objek dengan noise.
Algoritma dalam removing pixel secara umum adalah :
Langkah – langkah yang dilakukan. 1. Menentukan pixel yang berhubungan.
CC = bwconncomp(BW, conn); 2. Hitung jumlah area dari pixel tersebut.
S = regionprops(CC, 'Area'); 3. Remove pixel yang diinginkan
BW2 = ismember(L, find([S.Area] >= P));
Setelah proses removing selesai seharusnya objek sudah dapat dikenali oleh
sistem, sehingga sistem dapat secara langsung menentukan titik tengah (centroid) dari objek tersebut, tetapi pada objek tersebut masih terdapat pixel – pixel yang berlainan, ini diakibatkan saat thresholding pixel tidak terjadi secara merata karena terdapat noise, oleh karena itu seakan-akan terlihat seperti bercak. Untuk itu sistem harus menghilangkan atau menyamarkan bercak – bercak tersebut dengan cara mengisi kembali daerah (region) dengan nilai pixel yang sama.
Proses pengisian daerah (region) dilakukan oleh sistem dengan cara mengisi daerah yang ditentukan dengan pixel yang sudah ditentukan juga, dengan syarat pixel
yang diisi tidak melewati sisi luar (edge) dari objek tersebut, jadi batas pengisian pixel hanya sampai sisi luar objek (edge).
[[1] Soille, P., Morphological Image Analysis: Principles and Applications, Springer-Verlag,
1999, pp. 173-174.]
Hasil dari proses image filling region dapat dilihat pada gambar dibawah.
Gambar 3.12 Hasil dari Image Filling Region
Berdasarkan gambar diatas, pixel – pixel di dalam objek sudah merata.
Pada tahap ini dijelaskan bagaimana mengisi kekosongan pada sebuah obyek yang masih terdapat pixel – pixel yang berlainan, P. soille pada bukunya Morphological
Image Analysis menjelaskan bagaimana mengisi sebuah kekosangan pada sebuah obyek.
Dengan cara menghapus semua pixel yang tidak terhubung ke batas luar (border) dari area gambar, atau dengan cara mengubah set nilai pixel yang tidak terhubung terhadap batas luar (border) atau dalam buku tersebut disebut sebuah erosi terhadap gambar yang ingin di fill.
Gambar diagram kartesius diatas diambil pada buku Morphological Image
Analysis, menjelaskan bagaimana erosi atau fill image terjadi, yaitu dengan cara
menghilangkannya (kiri) dan mengubah set nilai pixel sehingga menjadi sama (kanan).
Gambar 3.13 Contoh Fill Image
Apabila gambar sudah terisi, maka output dari gambar akan lebih mudah untuk di analisa, membuat objek sudah dapat dikenali dengan utuh, namun masih terdapat pixel yang terhubung (connected pixel) namun tipis, tetapi itu tidak mempengaruhi sistem untuk menentukan titik tengah (centroid) dari objek tersebut, karena objek sudah dapat dilihat secara jelas dan keutuhan objek tersebut juga sudah jelas.
Proses selanjutnya ialah menentukan titik tengah (centroid) dari objek, proses ini ialah proses terakhir pada diagram alir segmentasi (segmentation).
Menentukan titik tengah ditentukan dari objek itu sendiri, untuk menentukan titik tengah dari objek maka dibutuhkan informasi dari daerah (region) dari objek tersebut. Pada Matlab banyak sekali fungsi – fungsi yang dapat digunakan untuk mencari properties pada objek tersebut, dan mencari titik tengah (centroid) adalah salah satunya.
Titik tengah (centroid) adalah vektor yang menunjukkan informasi x dan y pusat dari daerah tersebut.
Gambar 3.14 Centroid (Matlab Help)
Gambar diatas mengilustrasikan bagaimana sebuah centroid pada sebuah bounding box,
region dari bounding box tersebut terdiri dari pixel putih dan pixel hitam, Matlab tidak
mencari centroid pada pixel putih ataupun pixel hitam, karena yang menjadi permintaan atau daerah yang menjadi permintaan adalah bounding box, maka Matlab akan menandai bahwa region yang valid atau yang termasuk dalam pencarian properties dari region adalah bounding box, dan pixel yang berwarna merah adalah centroid dari bounding box tersebut. Elemen dari centroid adalah horizontal coordinate (x-coordinate) dari pusat massa dan elemen kedua adalah vertical coordinate (y-coordinate). Elemen – elemen lain dalam centroid adalah dalam bentuk dimensi.
Pada pencarian centroid tidak berhenti hanya sampai mencari region dan menentukan
centroid, tetapi bagaimana menampilkan informasi yang jelas dilayar bahwa terdapat centroid pada region yang dianalisa.
Untuk menampilkan centroid maka digunakan perintah plot pada Matlab, plot adalah perintah untuk menampilkan string pada gambar.
Hasil dari proses find centroid dapat dilihat pada gambar dibawah.
Gambar 3.15 Hasil dari Proses find centroid
3.5 Proses Menghitung Kecepatan
Proses akhir dari diagram alir secara keseluruhan adalah menghitung kecepatan dari obyek tersebut, pada dasar teori yang telah dikumpulkan, untuk menghitung kecepatan kita membutuhkan informasi mengenai titik atau koordinat dari benda tersebut (dalam hal ini berbentuk 2D). Pada bab sebelumnya dijelaskan mengenai obyek yang bergerak mengalami perpindahan atau pergeseran, terhadap lokasi awal yang ditempatinya, perlu diketahui bahwa perpindahan tersebut akan menghasilkan perbedaan nilai titik atau koordinat, perbedaan nilai tersebutlah yang akan digunakan sistem untuk menghitung kecepatannya.
Berikut adalah diagram alir proses menghitung kecepatan :
Gambar 3.16 Diagram Alir Sistem Menghitung Kecepatan
Pada proses ini akan dijelaskan bagaimana sistem akan mendapatkan kecepatan dan perubahan sudut, nilai pixel yang didapat, akan dikonversikan kedalam satuan meter, sehingga satuan yang keluar akan berupa meter, dengan memberikan nilai – nilai tersebut, maka sistem akan langsung menghitung magnitude dari kecepatan rata – rata yang didapat, dan perubahan sudut yang dihasilkan.
Beberapa hal yang perlu diketahui pada percobaan ini adalah, saat mobil pada posisi awal maka tentunya tidak ada perubahan yang terjadi didalam proses tersebut,
maka pada gambar awal yang diambil kecepatan (velocity) benda tersebut pasti 0, dengan perubahan sudut juga 0.
Hasil kecepatan dari gambar yang diperoleh :
Gambar 3.5.2 Hasil Perhitungan Kecepatan pertama
Gambar 3.5.3 Hasil Perhitungan Kecepatan kedua
Pada percobaan ini, nilai dari koordinat x dan y telah ditampung kedalam
variabel, lalu masuk kedalam algoritma perhitungan kecepatan, yang kemudia langsung
ditampilan pada layar user.
Berdasarkan percobaan yang di lakukan sampai tahap ini maka diharapkan tujuan dari skripsi ini tercapai, yaitu mendapatkan informasi dari kecepatan (velocity)
dan arah perpindahan. Karena pengamatan yang dilakukan bertujuan mendapatkan
velocity maka algoritma untuk mendapatkan speed tidak diikut sertakan pada skripsi ini.
pada perhitungan kecepatan, kemampuan kamera dalam mengambil gambar dan cahaya yang masuk juga menjadi pertimbangan apakah hasil yang didapat sesuai keinginan atau tidak. Karena pencahayaan yang tidak baik akan mengubah nilai pixel yang membuat intensitas cahaya gambar berubah.
Berdasarkan percobaan – percobaan tersebut maka pada bab ini telah didapatkan bahwa sistem berjalan sesuai dasar teori yang dikumpulkan, dasar – dasar teori menjadi pendukung utama dalam perancangan, baik dari perancangan awal hingga perancangan akhir, maka perancangan pada bab ini akan dilanjutkan terhadap bab selanjutnya, dengan melakukan uji coba terhadap perancangan – perancangan sistem diatas.