BAB I PENDAHULUAN A. Latar belakang
Dalam fisika gaya diartikan sebagai tarikan atau dorongan. Gaya termasuk salah satu dari besaran vektor karena selain mempunyai nilai gaya juga mempunyai arah. Alat untuk mengukur gaya adalah neraca pegas atau dinamometer. Satuan gaya dalam SI adalah Newton (N). Bentuk gaya tidak bisa kita dilihat, namun kita dapat merasakan pengaruh suatu gaya. Semakin besar gaya, makin besar pula tenaga yang diperlukan. Gaya memiliki beberapa sifat diantaranya :
1. Gaya dapat mengubah bentuk suatu benda. 2. Gaya dapat mengubah arah gerak suatu benda 3. Gaya dapat menyebabkan benda bergerak
Gaya yang diberikan terhadap suatu benda akan memberikan pengaruh terhadap benda tersebut.
Pengaruh Gaya terhadap Benda diantaranya : Benda yang diam akan bergerak jika diberi gaya.
Contoh : mobil yang mogok akan bergerak ke depan jika di dorong, bola yang diam akan melambung keika di tendang. Dalam kasus tersebut gaya berpengaruh terhadap gerak benda.
Benda yang sedang bergerak, apabila diberi gaya mengakibatkan benda tersebut diam, berubah arah geraknya ataupun bergerak lebih cepat
Contoh : bola yang bergerak akan diam ketika ditangkap, kelereng yang menggelinding akan berubah arah ketika menabrak tembok.
Benda yang dikenai gaya mengakibatkan benda berubah bentuk.
Contoh : Kaleng bekas minuman penyok ketika di injak, beras akan menjadi tepung beras ketika di tumbuk.
Tujuan
Untuk mengetahui jenis-jennis gaya? Untuk mengetahui rumus gaya?
BAB II PEMBAHASAN A. Pengertian Gaya
Gaya adalah suatu besaran yang menyebabkan benda bergerak. Gaya dapat mengakibatkan perubahan – perubahan sebagai berikut :
1) benda diam menjadi bergerak 2) benda bergerak menjadi diam 3) bentuk dan ukuran benda berubah 4) arah gerak benda berubah
Berdasarkan Hukum II Newton “ Massa benda dipengaruhi oleh gaya luar yang berbanding terbalik dengan percepatan gerak benda tersebut“ Secara matematis ditulis :
F = m.a ………(1) dimana : m = massa [kg]
a = percepatan [m/dt 2 ] F = kg.m/det 2 = N (Newton) B. Macam - Macam Gaya
Berdasarkan penyebabnya, gaya dikelompokkan sebagai berikut : 1. gaya mesin, yaitu gaya yang berasal dari mesin
2. gaya magnet, yaitu gaya yang berasal dari magnet 3. gaya gravitasi, gaya tarik yang diakibatkan oleh bumi 4. gaya pegas, yaitu gaya yang ditimbulkan oleh pegas
Berdasarkan sifatnya, gaya dikelompokkan menjadi :
1. gaya sentuh, yaitu gaya yang timbul karena titik kerja gaya, langsung bersentuhan dengan benda.
2. gaya tak sentuh, yaitu gaya yang timbul walaupun titik kerja gaya tidak bersentuhan dengan benda
C. Metode Dasar Pengukuran Gaya
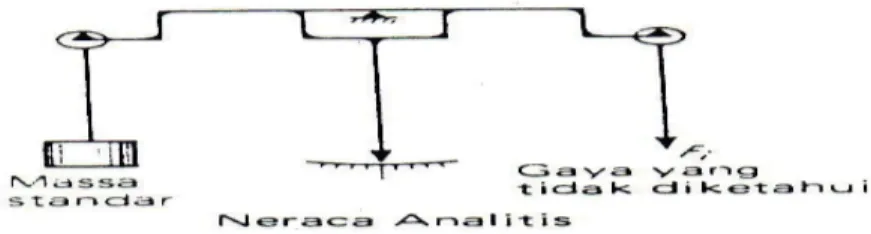
Metode 1 .Menyeimbangkan gaya ini dengan gaya gravitasi yang sudah diketahui dari suatu massa standar, baik langsung ataupun memakai sistem tuas tuas.
Metode ini digambarkan dengan neraca analitis, neraca bandul dan timbangan kodok. Neraca analitis meskipun dasar kerjanya sederhana, tetapi meminta perencanaan dan operasi yang cermat untuk mencapai hasil maksimal. Lengan neraca direncanakan sedemikian rupa, sehingga titik pusat massanya berada sedikit (beberapa perseribu inci) di bawah tumpuan tajam dan oleh karena iti berada dalam keseimbangan yang sangat stabil. Ini mengakibatkan defeksi lengan neraca ( pada instrumen yang peka dibaca dengan memakai mikrometer optik) penunjuk yang peka terhadap ketidakseimbangan. Pada ujung bawah daerah ukur instrumen tertentu, sering kali defeksi cahaya digunakan sebagai pembacaan pengukuran di samping dipakai untuk menyeimbangkan neraca dengan jalan penambahan beban atau mengatur panjang lengan beban ukur. Pendekatan ini lebih cepat daripada membuat penunjukan nol tetapi hubungan sudut defeksi dan keadaan tidak seimbang, harus diketahui secara tepat dan harus stabil. Hubungan ini cenderung untuk berubahubah dengan besarnya beban pada neraca, karena perubahan bentuk tumpuan tajam dan sebagainya, tetapi perencanaan yang cermat dapat memberikan kesalahan sekecil mungkin. Untuk pengukuran pengukuran dengan ketelitian yang tinggi, gaya tekan ke atas pada massa standar yang disebabkan oleh udara harus diperhitungkan . Neraca neraca yang sangat peka harus diletakan di dalam ruangan yang dikendalikan suhunya dan dijalankan dengan pengaturan jauh
untuk mengurangi pengaruh suhu badan operator dan arus konveksi panas.
Umumnya beda suhu 1/20o C antara kedua lengan neraca akan menyebabkan perbandingan
panjang lengan berubah dengan 1/1.000.000 bagian, cukup besar untuk beberapa pemakaian.
Gambar 1. Neraca Analitis
Neraca bandul adalah instrumen jenis defeksi, yaitu gaya yang tidak diketahui diubah menjadi torsi yang diseimbangkan dengan torsi massa standar yang tetap yang diatur sebagai bandul. Bentuk praktis dari dasar kerja ini menggunakan suatu bentuk sector tertentu dan pita baja untuk melinierkan hubungan sudut torsi bandul yang tidak linier. Gaya yang tidak diketahui Fi, dapat dikerjakan langsung atau dengan memakai system tuas tuas, seperti yang terlihat pada timbangan kodok, untuk memperlebar daerah ukur. Suatu sinyal listrik yang sebanding dengan gaya sangat mudah didapat dengan memakai transducer pergeseran sudut yang diletakakan dalam timbangan untuk mengukur sudut θ. Timbangan kodok menggunakan sistem tuastuas untuk mengukur gaya yang besar, dengan memakai standar berat yang jauh lebih kecil. Batang lengan neraca diseimbangkan dengan mengkombinasikan dengan tepat pemberat gantung dan tangan tuas pemberat geser spanjang skala yang sudah dikalibrasi. Timbangan ini dapat mengadakan gerak keseimbangan sendiri dengan menambahkan sensor listrik untuk pergeseran untuk mendeteksi keadaan seimbang dan sebuah sistem penguat motor untuk menggerakan pemberat geser pada posisi seimbang. Keuntungan lain yang menarik adalah bahwa bila a/b=c/d, pembacan timbangan tidak terpengaruh pada letak Fi pada timbangan. Karena hal ini sangat menguntungkan, kebanyakan timbangan yang ada dipasaran dilengkapi dengan cara ini dengan menggunakan sistem suspensi seperti yang ditunjukkan gambar atau sistem lain yang menghasilkan keadaan yang sama. Bila neraca analitis hampir hanya digunakan untuk “penimbangan berat” (sebetulnya menentukkan massa) dari suatu benda atau bahan kimia,
timbangan kodok dan neraca bandul juga digunakan untuk pengukuran gaya, seperti yang terdapat dalam penentuan daya poros pada dinamometer, ketiga instrumen itu terutama digunakan untuk pengukuran gaya statik.
(a)
( b )
Gambar 2. (a) Neraca Bandul,(b) Neraca Kodok
Metode 2. Mengukur percepatan suatu benda dengan massa tertentu yang dipengaruhi gaya yang akan diukur.
Penggunaan pengukuran percepatan untuk mengukur gaya, terbatas sekali penggunaannya karena gaya yang ditentukan merupakan gaya resultan pada suatu massa.
Seringkali beberapa gaya yang tidak diketahui bersamasama bekerja , dan gayagaya tersebut tidak dapat diukur secara terpisah dengan metode ini.
Gambar 3. Mengukur percepatan suatu benda dengan massa tertentu
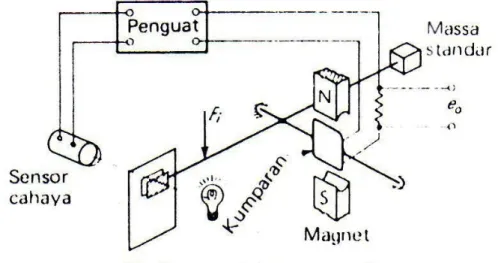
Metode 3. Menyeimbangkan dengan gaya magnetik yang dihasilkan oleh interaksi antara kumparan beraliran listrik dan suatu magnit.
Neraca elektromagnetik memakai sebuah detektor fotoelektrik ( atau sensor pergeseran yang lain) untuk mendeteksi keadan seimbang, sebuah penguat dan kumparan torsi dalam suatu sistem servo untuk menyeimbangkan perbedaan antara gaya yang tidak diketahui Fi dengan gaya gravitasi pada massa standar. Keuntungankeuntungan relative dibandingkan dengan neraca mekanis adalah mudah dipakai, kurang peka terhadap lingkungan, lebih cepat mengukur, ukuran yang lebih kecil dan kemudahan untuk pengukuran jarak jauh, Juga sinyal listrik yang dihasilkan sangat berguna untuk penggunaan perekam yang terus menerus dan/atau untuk mengendalikan otomatis. Neraca neraca yang diperlengkapi dengan mikroprosesor akan memberikan keuntungan yang lebih besar lagi, dapat dipakai untuk berbagai keperluan dan cepat digunakan dengan memakai banyak tatacara rutin yang bekerja otomatis dan memberikan keuntungan keuntungan yang semula tidak
mungkin. Sistem beratcara otomatik menghilangkan pengaruh berat wadah dari berat total dan memberikan berat bersih pada keadaan di mana barang yang ditimbang ada dalam wadah. Program program statistis, melaksanakan perhitungan harga ratarata dan deviasi standar untuk suatu rentetan pengukuran berat, “Menghitung” bagian kecil dengan penimbangan dipercepat dengan memprogram mikroprosesor untuk membaca langsung jumlah bagian bagian, bukan beratnya. Penimbangan yang teliti pada laboratorium binatang hidup (sulit dilaksanakan dengan timbangan biasa karena gerakan binatang) dapat dilaksanakan dengan merata ratakan pembacaan timbangan dengan selang waktu yang sudah dipilih terlebih dulu. Menghubungkan timbangan ( dengan sambungan luar atau di dalam) dengan sebuah alat perekam tulis untuk merekam hasil pengukuran akan mudah dilaksanakan dengan memakai mikroprosesor.
Gambar 4. Timbangan elektromagnetik
Metode 4. pengukuran tekanan fuida yang dipengaruhi oleh gaya yang diukur dengan sel hidrolik dan pneumatik.
Sel sel hidrolik berisi penuh dengan minyak dan biasanya bertekanan mula sekitar 30 lb/in 2. Pengerjaan beban akan menaikkan
tekanan minyak, yang terbaca pada alat ukur. Transducer listrik untuk tekanan dapat digunakan untuk mendapatkan sinyal listrik. Selnya sangat kaku, defeksinya hanya beberapa perseribu inci pada beban penuh. Didapati patokan dengan kemampuan sampai 100.000 lbf sedang pengukuran tertentu sampai dengan kemampuan
10 juta lbf. Derajat ketelitian 0,1 persen pada skala penuh, kepekaan sekitar 0,02 persen, Suatu penjumlah hidrolik tersedia untuk menghasilkan suatu tekanan yang sama dengan jumlah dari 10 macam tekanan dalam sistem sel ganda seperti yang digunakan pada tangki pengukur berat dan sebagainya. Sel pneumatik seperti yang terlihat memakai transducer nosel fapper sebagai penguat dengan penguatan yang tinggi dalam suatu rangkaian servo. Kerja gaya Fi menyebabkan defeksi diafragma sebesar x, yang menyebabkan kenaikan tekanan po karena nosel hampir tertutup. Kenaikan tekanan yang mempengaruhi luasan difragma A menghasilkan gaya efektif Fp yang cenderung mengembalikan letak diafragma pada keadaan semula. Untuk setiap gaya Fi, sistem akan mecapai keadaan seimbang pada suatu keadaan tertentu nosel dan sebanding dengan tekanan po. Keadaan statik diberikan oleh:
(Fi – po A) Kd Kn = Po ……….(2) dengan : Kd = kompliansi
diafragma, in/lbf
Kn = penguatan nosel plapper (lb/in 2 )/in Penyelesaian untuk
mendapatkan Po
Harga Kn tidaklah tetap, tetapi berubah terhadap x, karena ketidaklinieran hubungan x dan po. Meskipun begitu dalam praktek Kd Kn adalah besar sekali, sehingga 1/(Kd Kn ) dapat diabaikan terhadap A, sehingga memberikan Po = Fi /A. Yang linier karena A adalah tetap. Seperti dalam setiap sistem umpan balik ketidakstabilan dinamik membatasi besarnya penguatan yang besarnya dapat dicapai. Tekanan po umurnya 60 lb/in 2 dan karena harga terbesar po tidak dapat mencapai Pa, ini akan membatasi Fi sampai harga sedikit lebih kecil dari 60 A. Bermacam macam system penimbangan pneumatik yang ada dipasaran menggunakan dasar kerja yang hampir sama(dikombinasikan dengan metode tuas dan metode tumpuan tajam) dalam daerah ukur dari yang umum sampai 110.000 lbf.
Gambar 5. Sel beban hidrolik dan Sel beban pneumatic Metode 5. Mengukur defleksi benda elastik yang dipengaruhi oleh gaya
yang diukur.
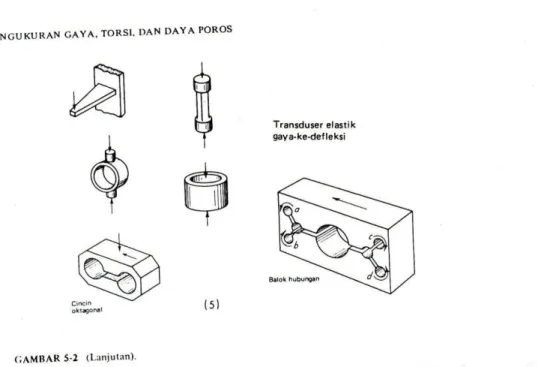
Metode ini banyak digunakan baik untuk beban statik maupun beban dinamis dengan frekuensi sampai beberapa ribu hertz. Semuanya adalah sistem massa pegas dengan (sengaja atau tidak sengaja) peredam, tetapi berbeda terutama pada bentuk giometrik “pegas” yang dipakai dan juga trsnsducer gerakan yang dipakai untuk mendapatkan sinyal listrik. Pergeseran letak yang dideteksi mungkin merupakan perpindahan total atau alat ukur regangan diletakkan dengan tepat untuk mengukur gaya dengan pengukur regangannya. Alat ukur tegangan yang terikat sangat berguna untuk mengukur gaya dengan memakai bagian yang elastik. Disamping sebagai transducer gaya ke defleksi, beberapa bagian elastik berfungsi sebagai pengurai vektor gaya atau vektor momen ke komponenkomponen tegak lurusnya. Sebagai contoh balok berlubang seperti pada gambar sangat kaku (tidak peka) terhadap semua gayagaya dan momen yang mempengruhi kecuali pada arah yang ditunjukkan oleh anak panah. Suatu transducer gerakan diatur untuk mengukur gerakan pada arah ini, sehingga hanya akan mengukur komponen vektor gaya yang terletak sepanjang sumbu
yang peka ini, Mungkin gerak dari balok berlubang ini lebih mudah terlihat dengan menganggapnya sebagai suatu susunan empat batang tuas dengan engsel lendutan pada bagian a,b,c dan d.
Gambar 6. Transducer elastik gaya ke defleksi Transducer Alat Ukur Regangan Terikat
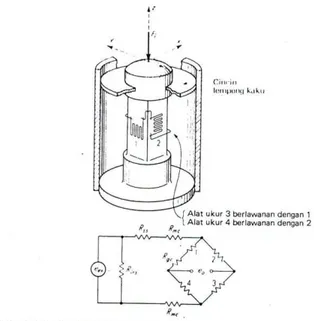
Suatu konstruksi yang umum dari suatu sel beban alat ukur regangan untuk mengukur gaya tekan. Selsel yang dipakai untuk mengukur regangan dan tekanan memerlukan tambahan peralatan untuk memegang kedua ujungnya. Bagian yang memegang harus cukup pendek untuk mencegah patahnya batang oleh gaya yang direncanakan dan dibuat supaya menghasilkan 1.500 με. Pada beban penuh (harga perencanaan yang umum untuk semua transducer alat ukur tipis). Bahan yang dipakai antara baja SAE 4340 dan baja tahan karat 174 PH dan campuran alumunium 2024T4 dan yang terakhir ini sangat lazim untuk transducer “buatan sendiri”. Alat ukur logam yang tipistipis ini direkatkan pada empat sisi, alat ukur 1 dan 3 merasakan gaya langsung karena beban Fi dan alat ukur 2 dan 4 peka terhadap gaya sesuai dengan angka perbandingan Poisson μ. Susunan ini memberikan kepekaan 2(1+ μ) kali yang dicapai bila dipakai satu alat ukur dalam jembatan untuk rangkaian jembatan. Ini juga memberi
kompensasi suhu yang baik karena keempat alat ukur (paling tidak ada suhu tetap) berada pada suhu yang sama. Selanjutnya, susunan tidak peka terhadap gaya tekan karena Fi dikerjakan pada sumbu batang atau membentuk sudut. Ini akan dapat terlihat dengan mengganti gaya yang bekerja tidak
pada sumbu batang dengan gaya yang setara dan bekerja pada sumbu dan sebuah kopel. Kopel inidapat diuraikan atas komponen x dan y yang menyebabkan gaya tekuk pada alat alat ukur.
Gambar 7. Sel beban alat ukur regangan
Bila alat alat ukur ditempatkan dengan cermat, sehingga simetri, maka gaya tekuk pada alat ukur 1 dan 4 akan akan berlawanan tanda, dan berdasarkan aturan rangkaian jembatan keluaran total eo akibat tekukan akan sama dengan nol. Penjelasan yang sama juga berlaku untuk alatalat ukur 2 dan 4 dan gaya tekuk karena pengaruh Fi pada sembarang sudut. Lempeng kaku untuk gaya samping juga memperkecil pengaruh gaya puntir, karena lempeng ini sangat kaku pada arah radial (x,y) tetapi sangat lunak pada arah z. Defeksi oleh beban
penuh dari sel beban seperti ini berkisar antara 0,001 sampai 0.015 inci, hal ini menunjukan kekakuan yang tinggi. Seringkali frekuensi alam tidak diperhatikan karena hampir seluruhnya ditentukkan oleh massa dari bagian yang menyangga gaya dari luar transducer. Hal ini benar dalam banyak pemakaian di mana sel beban untuk pemakaian berat. Kekakuan yang tinggi juga berarti kepekaan yang rendah. Untuk mempertinggi kepekaan (pada sel untuk gaya kecil hal ini diperlukan ) tanpa mengorbankan stabilitas batang dan luasan permukaan untuk melekatkan alat ukur, dapat dipergunakan penyangga gaya berlubang ( persegi pada sisi luar, bulat pada sisi dalam). Untuk mencapai ketelitian yang tinggi (0,3 sampai 0,1 persen skala penuh) yang dipersyaratkan untuk banyak pemakaian, diperlukan tambahan kompensasi suhu. Hal ini dapat dilaksanakan dengan hambatanhambatan peka suhu Rgc dan Rmc seperti terlihat pada gambar. Hambatanhambatan ini diletakkan di dalam sel beban secara tetap sehingga dapat dianggap mempunyai suhu sama dengan alatalat ukur. Kegunaan ke empat alat ukur. Kegunaan Rmc adalah untuk memberikan
kompensasi terhadap adanya perubahan modulus elastisitas bagian yang merasakan beban oleh adanya perubahan suhu. Meskipun kita mengharapkan untuk mengukur gaya tetapi alat ukur juga mengukur regangan; oleh karena itu semua logam berubah modulus elastisitasnya akan memberikan perbedaan regangan (dan berarti eo yang berbeda) meskipun gaya yang mempengaruhi sama. Oleh karena semua logam berubah modulus elastisitasnya oleh perubahan suhu, pengaruh ini menyebabkan gangguan pada kepekaan. Hambatan Rmc memberi kompensasi dengan jalan merubah tegangan masuk pada jembatan dengan perubahan yang tepat untuk meniadakan pengaruh perubahan modulus elastis. Dua hambatan tambahan (tidak peka suhu) seringkali didapati pada sel beban di pasaran. Kedua hambatan itu adalah Rss yang diatur menetapkan kepekaan pada harga yang dikehendaki untuk suatu harga nominal eex dan Rirs, yang diapakai untuk mengatur hambatan masuk harga yang dikehendaki. Bila kepekaan yang cukup tidak dapat dicapai dengan
menggunakan alat ukur tegangan/tekanan, susunan dengan menggunakan gaya tekuk mungkin dapat menolong. Ini umumnya memberikan regangan lebih besar persatuan gaya yang mempengaruhi tetapi dengan kerugian berkurangnya kekakuan dan frekuensi alam. Dari banyak kemungkinan, dua diantaranya terlihat pada gambar. Alat ukur balok tergantung memberikan kepekaan 4 kali alat ukur tunggal, kompensasi suhu dan ketidak pekaan terhadap komponen gaya arah x dan y bila dianggap bahwa dipakai alat ukur yang identic dan dipasang simetri.
BAB III PENUTUP
KESIMPULAN
Gaya, di dalam ilmu fisika, adalah interaksi apapun yang dapat menyebabkan sebuah benda bermassa mengalami perubahan gerak, baik dalam bentuk arah, maupun konstruksi geometris. Dengan kata lain, sebuah gaya dapat menyebabkan sebuah objek dengan massa tertentu untuk mengubah kecepatannya (termasuk untuk bergerak dari keadaan diam), atau berakselerasi, atau untuk terdeformasi. Gaya memiliki besaran (magnitude) dan arah, sehingga merupakan kuantitas vektor. Satuan SI yang digunakan untuk mengukur gaya adalah Newton (dilambangkan dengan N). Gaya sendiri dilambangkan dengan simbol F.
Hukum kedua Newton menyatakan bahwa gaya resultan yang bekerja pada suatu benda sama dengan laju pada saat momentumnya berubah terhadap waktu. Jika massa objek konstan, maka hukum ini menyatakan bahwa percepatan objek berbanding lurus dengan gaya yang bekerja pada objek dan arahnya juga searah dengan gaya tersebut, dinyatakan dengan
F= M.A
Konsep yang berhubungan dengan gaya antara lain: gaya hambat, yang mengurangi kecepatan benda, torsi yang menyebabkan perubahan kecepatan rotasi benda. Pada objek yang diperpanjang, setiap bagian benda menerima gaya, distribusi gaya ke setiap bagian ini disebut regangan. Tekanan merupakan regangan sederhana. Regangan biasanya menyebabkan deformasi pada benda padat, atau aliran pada benda cair.